基于無人機(jī)的大氣污染源溯源可視化系統(tǒng)設(shè)計與實現(xiàn)
2021-08-20 15:28:35劉奎
機(jī)電信息 2021年20期
劉奎
摘要:當(dāng)前,規(guī)模化的工業(yè)園區(qū)越來越多地出現(xiàn),園區(qū)企業(yè)的廢氣排放不僅是重要的空氣污染源,也是影響本地空氣質(zhì)量考核、引起居民投訴信訪量上升等的最重要因素。園區(qū)大氣污染物中的細(xì)顆粒物、揮發(fā)性有機(jī)物、硫氧化物和氮氧化物等對于人體健康有著極大的危害,會直接或間接導(dǎo)致當(dāng)?shù)乜諝赓|(zhì)量檢測數(shù)據(jù)上升。而面對突發(fā)性的投訴和階段性檢測數(shù)據(jù)上升時,由于園區(qū)內(nèi)的排放源很多,排放物隨著大氣流動,管理者常常因不能確定大氣污染物準(zhǔn)確來源而無法實施針對性管理。鑒于此,利用無人機(jī)高空俯瞰的視角、超大的監(jiān)控范圍、快速的響應(yīng)能力,設(shè)計和實現(xiàn)了大氣污染源溯源可視化系統(tǒng),將傳統(tǒng)的只能地面作業(yè)的大氣污染檢測擴(kuò)展到了立體空間。
關(guān)鍵詞:可視化;污染源;大氣;溯源;無人機(jī)
0 ? ?引言
近年來,無人機(jī)的應(yīng)用越來越廣,在環(huán)保領(lǐng)域的應(yīng)用也越來越多,特別是在大氣環(huán)境檢測中的應(yīng)用更為廣泛。無人機(jī)具有高空俯瞰的視角、超大的監(jiān)控范圍、快速的響應(yīng)能力,因而得以將傳統(tǒng)的只能地面作業(yè)的大氣污染檢測擴(kuò)展到立體空間,這就為基于無人機(jī)實現(xiàn)污染源快速溯源提供了技術(shù)保障,為大氣污染源溯源可視化系統(tǒng)的設(shè)計和實現(xiàn)奠定了基礎(chǔ)。
1 ? ?系統(tǒng)設(shè)計
1.1 ? ?系統(tǒng)框架
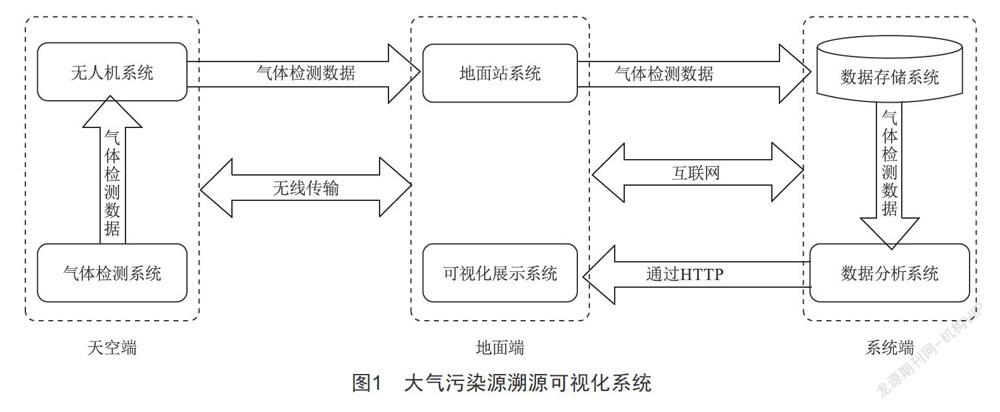
如圖1所示,基于無人機(jī)的大氣污染源溯源可視化系統(tǒng)可分為三大部分:天空端、地面端和系統(tǒng)端。
天空端由氣體檢測儀系統(tǒng)和無人機(jī)系統(tǒng)組成,地面端由地面站系統(tǒng)和可視化展示系統(tǒng)組成,系統(tǒng)端由數(shù)據(jù)存儲系統(tǒng)和數(shù)據(jù)分析系統(tǒng)組成。氣體檢測系統(tǒng)將傳感器獲取的氣體濃度數(shù)據(jù)通過無人機(jī)系統(tǒng)的無線傳輸系統(tǒng)傳輸?shù)降孛嬲鞠到y(tǒng),地面站系統(tǒng)將數(shù)據(jù)通過4G/5G網(wǎng)絡(luò)傳輸?shù)较到y(tǒng)端的數(shù)據(jù)存儲系統(tǒng),數(shù)據(jù)分析系統(tǒng)通過對數(shù)據(jù)進(jìn)行分析,將分析結(jié)果以Web方式進(jìn)行展示。
1.2 ? ?功能模塊
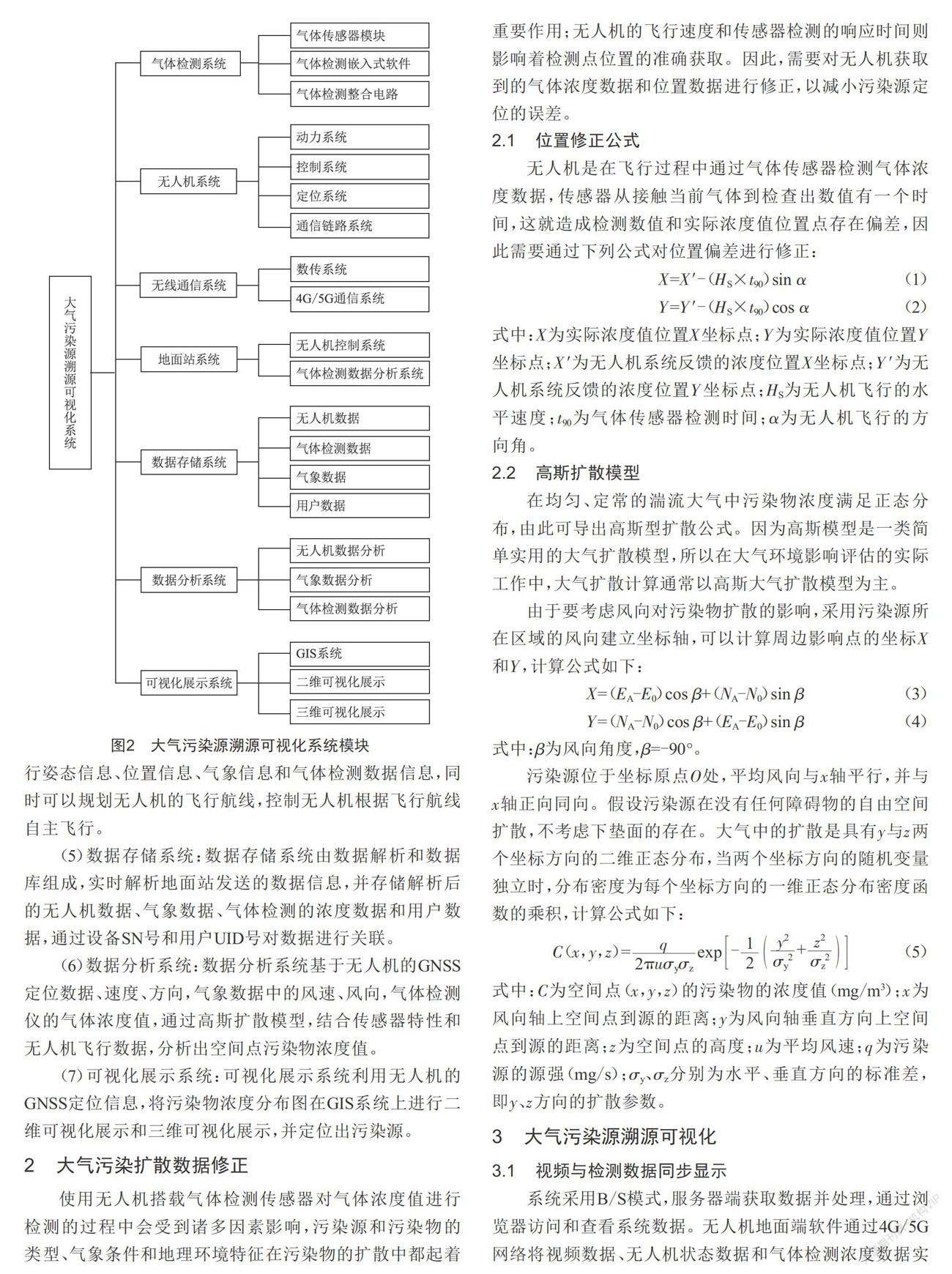
根據(jù)實際需要,整個系統(tǒng)可分成多個子系統(tǒng),具體包括無人機(jī)系統(tǒng)、氣體檢測系統(tǒng)、無線通信系統(tǒng)、地面站系統(tǒng)、數(shù)據(jù)存儲系統(tǒng)、數(shù)據(jù)分析系統(tǒng)和可視化展示系統(tǒng),各個子系統(tǒng)有相應(yīng)的子模塊,如圖2所示。
下面對各個模塊的功能進(jìn)行簡要說明:
(1)氣體檢測系統(tǒng):氣體檢測系統(tǒng)可以同時安裝6組氣體檢測模塊,一次進(jìn)行多種氣體的檢測,通過不同的組合適用不同的應(yīng)用場景,在不同場景下進(jìn)行污染源追溯。比如在大氣環(huán)境中同時檢測PM2.5、PM10、SO2、CO、NO2、O3和VOCs,通過配置6組高精密傳感器同時檢測多種氣體濃度。
(2)無人機(jī)系統(tǒng):無人機(jī)系統(tǒng)作為氣體檢測的搭載平臺,攜帶氣體檢測系統(tǒng)完成立體空間的氣體檢測工作,整個系統(tǒng)由鋰電池供電提供動力,通過GNSS系統(tǒng)完成系統(tǒng)定位,通過飛控系統(tǒng)完成無人機(jī)的自主飛行,通過數(shù)據(jù)鏈路系統(tǒng)將無人機(jī)數(shù)據(jù)和氣體檢測數(shù)據(jù)傳輸?shù)降孛嬲鞠到y(tǒng)。
(3)無線通信系統(tǒng):無線通信系統(tǒng)把天空端、地面端和系統(tǒng)端連接起來,形成一個完整的系統(tǒng)。通過數(shù)傳系統(tǒng)無人機(jī)把天空端的無人機(jī)數(shù)據(jù)、氣象數(shù)據(jù)和氣體檢測數(shù)據(jù)傳輸?shù)降孛嬲鞠到y(tǒng),地面站系統(tǒng)把航線數(shù)據(jù)傳輸?shù)綗o人機(jī)系統(tǒng);4G/5G網(wǎng)絡(luò)將地面站接收到的數(shù)據(jù)傳輸?shù)綌?shù)據(jù)存儲系統(tǒng)。
(4)地面站系統(tǒng):地面站系統(tǒng)能實時查看無人機(jī)的飛行姿態(tài)信息、位置信息、氣象信息和氣體檢測數(shù)據(jù)信息,同時可以規(guī)劃無人機(jī)的飛行航線,控制無人機(jī)根據(jù)飛行航線自主飛行。
(5)數(shù)據(jù)存儲系統(tǒng):數(shù)據(jù)存儲系統(tǒng)由數(shù)據(jù)解析和數(shù)據(jù)庫組成,實時解析地面站發(fā)送的數(shù)據(jù)信息,并存儲解析后的無人機(jī)數(shù)據(jù)、氣象數(shù)據(jù)、氣體檢測的濃度數(shù)據(jù)和用戶數(shù)據(jù),通過設(shè)備SN號和用戶UID號對數(shù)據(jù)進(jìn)行關(guān)聯(lián)。
(6)數(shù)據(jù)分析系統(tǒng):數(shù)據(jù)分析系統(tǒng)基于無人機(jī)的GNSS定位數(shù)據(jù)、速度、方向,氣象數(shù)據(jù)中的風(fēng)速、風(fēng)向,氣體檢測儀的氣體濃度值,通過高斯擴(kuò)散模型,結(jié)合傳感器特性和無人機(jī)飛行數(shù)據(jù),分析出空間點(diǎn)污染物濃度值。
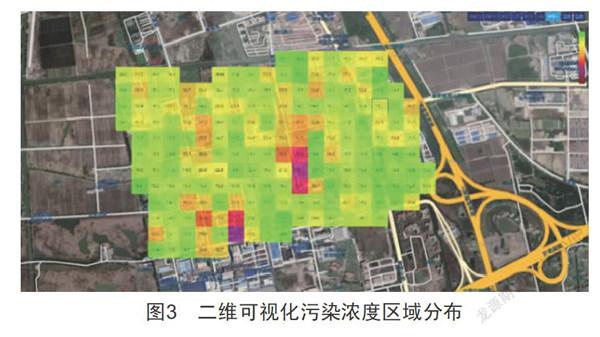
(7)可視化展示系統(tǒng):可視化展示系統(tǒng)利用無人機(jī)的GNSS定位信息,將污染物濃度分布圖在GIS系統(tǒng)上進(jìn)行二維可視化展示和三維可視化展示,并定位出污染源。
2 ? ?大氣污染擴(kuò)散數(shù)據(jù)修正
使用無人機(jī)搭載氣體檢測傳感器對氣體濃度值進(jìn)行檢測的過程中會受到諸多因素影響,污染源和污染物的類型、氣象條件和地理環(huán)境特征在污染物的擴(kuò)散中都起著重要作用;無人機(jī)的飛行速度和傳感器檢測的響應(yīng)時間則影響著檢測點(diǎn)位置的準(zhǔn)確獲取。因此,需要對無人機(jī)獲取到的氣體濃度數(shù)據(jù)和位置數(shù)據(jù)進(jìn)行修正,以減小污染源定位的誤差。
2.1 ? ?位置修正公式
無人機(jī)是在飛行過程中通過氣體傳感器檢測氣體濃度數(shù)據(jù),傳感器從接觸當(dāng)前氣體到檢查出數(shù)值有一個時間,這就造成檢測數(shù)值和實際濃度值位置點(diǎn)存在偏差,因此需要通過下列公式對位置偏差進(jìn)行修正:
X=X′-(HS×t90)sin α ? ? ? ? ? ? ? ? (1)
Y=Y′-(HS×t90)cos α ? ? ? ? ? ? ? (2)
式中:X為實際濃度值位置X坐標(biāo)點(diǎn);Y為實際濃度值位置Y坐標(biāo)點(diǎn);X′為無人機(jī)系統(tǒng)反饋的濃度位置X坐標(biāo)點(diǎn);Y′為無人機(jī)系統(tǒng)反饋的濃度位置Y坐標(biāo)點(diǎn);HS為無人機(jī)飛行的水平速度;t90為氣體傳感器檢測時間;α為無人機(jī)飛行的方向角。
2.2 ? ?高斯擴(kuò)散模型
在均勻、定常的湍流大氣中污染物濃度滿足正態(tài)分布,由此可導(dǎo)出高斯型擴(kuò)散公式。因為高斯模型是一類簡單實用的大氣擴(kuò)散模型,所以在大氣環(huán)境影響評估的實際工作中,大氣擴(kuò)散計算通常以高斯大氣擴(kuò)散模型為主。
猜你喜歡
軍事文摘(2023年10期)2023-06-09 09:15:06
世界科學(xué)技術(shù)-中醫(yī)藥現(xiàn)代化(2022年3期)2022-08-22 00:32:50
云南化工(2021年8期)2021-12-21 06:37:54
海洋信息技術(shù)與應(yīng)用(2020年1期)2020-06-11 12:43:56
傳媒評論(2019年4期)2019-07-13 05:49:14
人間(2016年26期)2016-11-03 17:52:40
中國科技博覽(2016年22期)2016-11-01 18:10:31
科技視界(2016年22期)2016-10-18 14:30:27
河北書畫研究(2016年2期)2016-08-24 02:14:50
新農(nóng)業(yè)(2016年18期)2016-08-16 03:28:27
