一種磁懸浮軸承功率放大器控制方法
2021-08-21 09:48:28賀永玲胡叨福
電子制作 2021年14期
賀永玲,胡叨福
(珠海格力電器股份有限公司,廣東珠海,519070)
0 引言
磁懸浮軸承通過電磁力將轉(zhuǎn)軸穩(wěn)定懸浮,具有無機械摩擦、損耗小、無潤滑的特點,適用于高速旋轉(zhuǎn)的場合[1]。磁懸浮軸承的功率放大器將控制電壓信號轉(zhuǎn)換為相應(yīng)控制電流輸入電磁鐵中,生成控制力,是磁懸浮軸承系統(tǒng)能量轉(zhuǎn)換的關(guān)鍵部分,也是影響磁懸浮軸承穩(wěn)定性的關(guān)鍵因素之一,磁懸浮軸承功率放大器的主電路拓?fù)溆袉伪凼健霕蚴健蜗嗳珮蚴健⒍鄻虮凼降榷喾N結(jié)構(gòu)[2]。
對于主動式磁懸浮軸承,其電流僅需單向流動,一般采用半橋式結(jié)構(gòu)開關(guān)功率放大器。一套主動式磁懸浮軸承系統(tǒng)中,需要對轉(zhuǎn)軸的前徑向XY、后徑向XY、軸向Z共五個自由度進(jìn)行控制,故共有10個電磁線圈,需要10個半橋式功率放大器[3]。對于半橋結(jié)構(gòu)的開關(guān)功率放大器的驅(qū)動電路,通常需要2路相互隔離的控制電源,一路用于上橋臂開關(guān)管的驅(qū)動,一路用于下橋臂開關(guān)管的驅(qū)動,10個開關(guān)功率放大器,至少需要11路相互隔離電源,其中,上橋臂的驅(qū)動電源相互隔離,所有下橋臂的驅(qū)動電源可共用。這樣所需要的電源數(shù)目眾多,設(shè)計十分復(fù)雜,而且可靠性也難以保證,可使用自舉電路來實現(xiàn)功率放大器的單一電源供電,實現(xiàn)自舉有一個關(guān)鍵問題是如何保證自舉電容電壓始終都能滿足開關(guān)管驅(qū)動電壓的要求,這是保證開關(guān)功率放大器可靠運行的關(guān)鍵。現(xiàn)有技術(shù)中,對自舉電容初始化充電以及正常運行時的充電有深入的研究,這些技術(shù)可實現(xiàn)自舉電容的充分充電,以達(dá)到開關(guān)功率放大器的可靠運行。但在磁懸浮軸承系統(tǒng)中,由于外力的作用,軸承線圈中的電流可能存在長時間為0的狀態(tài),此時自舉電容不能及時充電,將導(dǎo)致其電壓不斷下降,若其電壓下降到開關(guān)管正常驅(qū)動電壓以下,在下次啟動來臨時,容易因開關(guān)管處于不完全導(dǎo)通狀態(tài)下而損壞,本文將結(jié)合磁懸浮軸承開關(guān)功率放大器的工作方式進(jìn)行詳細(xì)分析并提出解決方法。
1 磁懸浮軸承開關(guān)功率放大器工作原理
半橋式開關(guān)功率放大器拓?fù)浣Y(jié)構(gòu)如圖1 所示。其中,UDC為直流母線電壓,L和RL分別為線圈的等效電感與電阻,Q1、Q2為開關(guān)管,D1、D2為續(xù)流二極管。UD為開關(guān)管驅(qū)動電源,HVIC為上橋開關(guān)管驅(qū)動芯片,LVIC為下橋開關(guān)管驅(qū)動芯片,自舉電路由自舉二極管D3,自舉電容C1和限流電阻R1組成,自舉電容提供上橋臂器件開通時柵極充電所需電荷,并提供上橋臂驅(qū)動芯片HVIC中邏輯電路消耗的電流。
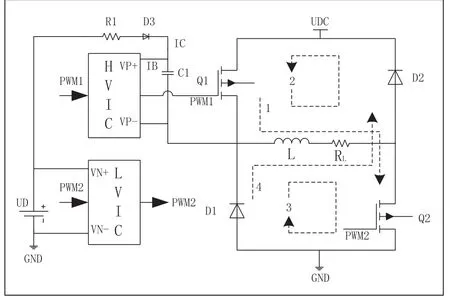
圖1 半橋式開關(guān)功率放大器拓?fù)浣Y(jié)構(gòu)
為了達(dá)到減少電流紋波、實現(xiàn)電流的精確控制,以及提高電流的響應(yīng)速度,開關(guān)功率放大器通常采用三電平控制,即驅(qū)動信號PWM1和PWM2相位相差180°,如圖2所示,三電平功率放大器輸出給負(fù)載兩端的電壓有+UDC、0、-UDC共三種工作狀態(tài),分別是電流增加狀態(tài)、電流續(xù)流狀態(tài)、電流減小狀態(tài)[4]。
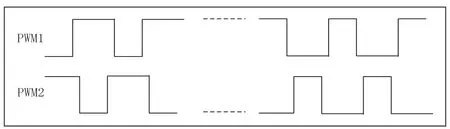
圖2 開關(guān)管驅(qū)動信號相位相差180°
圖1 中虛線1–4分別為功率放大器四種工作狀態(tài):
狀態(tài)1:Q1和Q2都導(dǎo)通,軸承線圈充電。自舉電容負(fù)端電壓約為UDC,自舉二極管反向截止,自舉電容放電,電壓逐漸降低;
狀態(tài)2:Q1導(dǎo)通,Q2關(guān)斷,軸承線圈電流通過D2、Q1續(xù)流。自舉電容負(fù)端電壓約為UDC,自舉二極管反向截止,自舉電容放電,電壓逐漸降低;
狀態(tài)3:Q1關(guān)斷,Q2導(dǎo)通,軸承線圈電流通過D1、Q2續(xù)流。自舉電容負(fù)端電壓約為GND,自舉二極管正向?qū)ǎ耘e電容充電,電壓逐漸升高;
狀態(tài)4:Q1和Q2都關(guān)斷,軸承線圈電流通過D1、D2放電。自舉電容負(fù)端電壓約為GND,自舉二極管正向?qū)ǎ耘e電容充電,電壓逐漸升高。
2 磁懸浮軸承功率放大器自舉電路可靠充電實現(xiàn)方式
在主動式磁懸浮軸承系統(tǒng)中,一般采用差動電流控制,差動電流是指在一個自由度中有兩個作用相反的軸承線圈在工作,這種布局使得系統(tǒng)既能產(chǎn)生正向力,又能產(chǎn)生反向力[5]。
當(dāng)轉(zhuǎn)子偏離參考位置S0時,由傳感器測出此時轉(zhuǎn)子偏離參考位置的位移sx,位移調(diào)節(jié)器將這一位移信號變換成控制電流ic,這樣得到其中一個軸承線圈的電流參考值為偏置電流I0與控制電流ic之和,即I0+ic,而另一個軸承線圈的電流參考值為偏置電流I0和控制電流ic之差,即I0+ic,并分別通過電流調(diào)節(jié)器實現(xiàn)對軸承線圈電流的控制。一個自由度上總電磁力F為:

式中,μ0為真空中磁導(dǎo)率;A0為電磁鐵的磁極面積;N為線圈匝數(shù)。
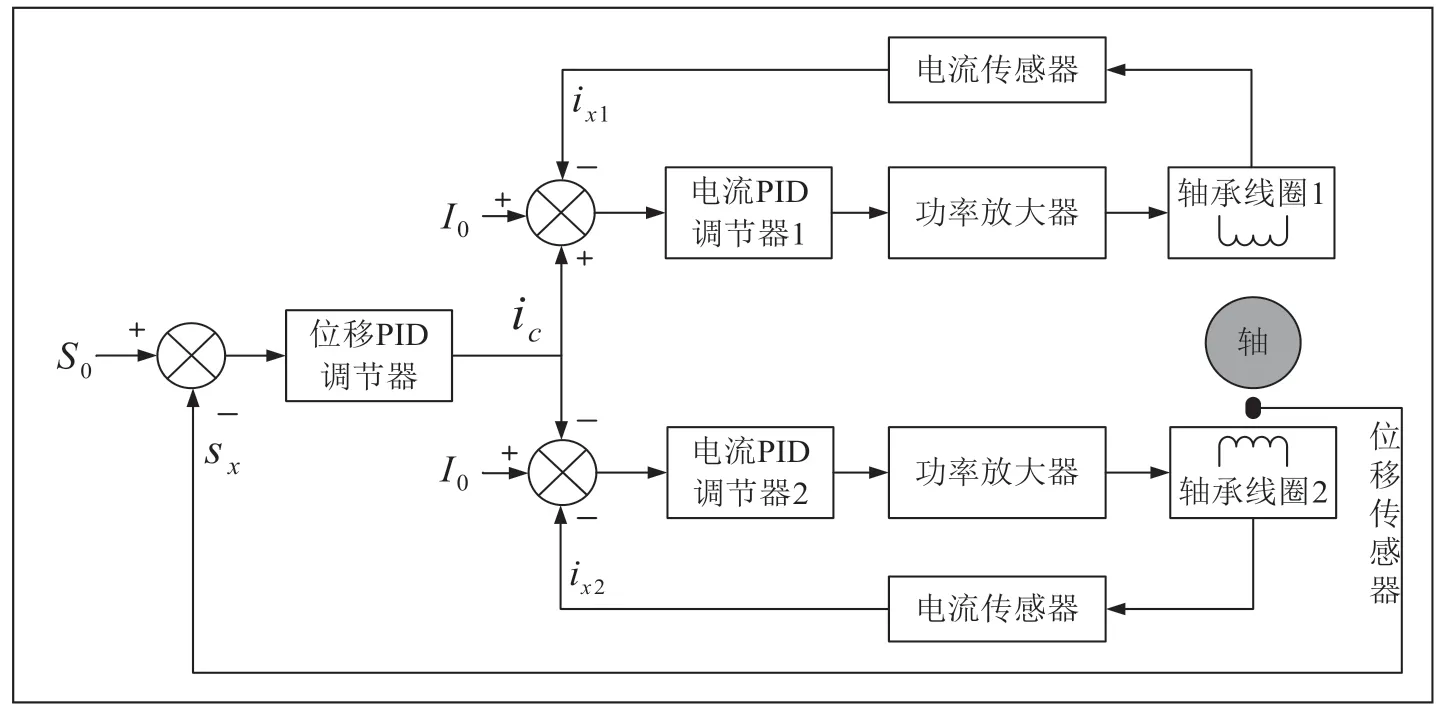
圖3 磁懸浮軸承差動控制框圖
假設(shè)當(dāng)轉(zhuǎn)軸持續(xù)受到一個向下的外力時,此時通過位移調(diào)節(jié)器輸出的控制電流ic增大,即軸承線圈1的電流增大,軸承線圈2的電流減小,當(dāng)外力增大到一定程度時,軸承線圈2的電流減少到0。如果外力持續(xù)時間較長,則軸承線圈2中的電流長時間為0,通過電流調(diào)節(jié)器計算,輸出給功率放大器的PWM信號占空比將降為0,則不存在Q2導(dǎo)通或D1續(xù)流的狀態(tài),自舉電容無充電回路,將導(dǎo)致其電壓不斷下降,當(dāng)電壓降低到開關(guān)管開通所需最低電壓,那么在下次啟動來臨時,存在因開關(guān)管處于不完全導(dǎo)通狀態(tài)而損壞的風(fēng)險。
針對上述問題,本文提出了一種穩(wěn)定可靠的自舉電容充電控制方法,以保證開關(guān)功率放大器的可靠運行。解決的辦法是根據(jù)線圈中有無電流來限制PWM的最小值,當(dāng)線圈中有電流時,PWM占空比最小值不作任何限制,因為自舉電容總是存在充電的機會,當(dāng)軸承線圈電流為0時,此時需要將PWM占空比限定在0到50%之間的一個值,因為PWM占空比大于50%開關(guān)管存在同時導(dǎo)通,則線圈充電,電流不為0,影響軸承懸浮控制,PWM占空比過小,則有可能存在充電不足,下面對滿足充電要求的占空比值進(jìn)行分析。
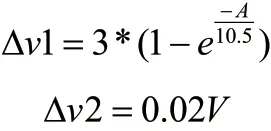
設(shè)自舉電容電壓為Uc1,開關(guān)管驅(qū)動欠壓保護(hù)電壓為U0,自舉電容僅在下橋開關(guān)管Q2導(dǎo)通時進(jìn)行充電,為了簡化分析,忽略軸承線圈電感,可得到充電時自舉電容電壓的增值Δv1為:

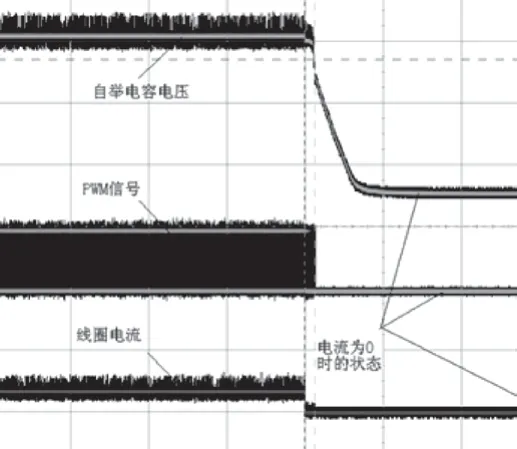
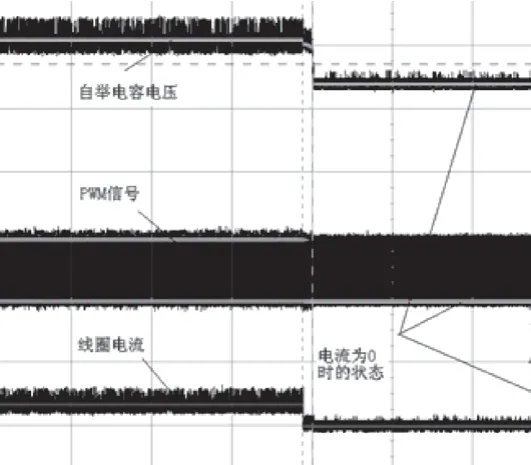
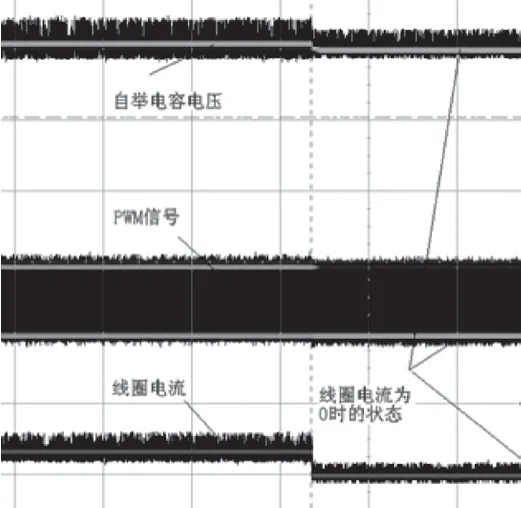
上式中,P為載波頻率,A為PWM占空比(0 自舉電容需要提供HVIC靜態(tài)消耗電流和Q1柵極驅(qū)動電流,設(shè)在一個PWM周期內(nèi),自舉電容平均消耗電流為IB,可得到自舉電容放電所降低的電壓Δv2為: 為了滿足可靠驅(qū)動,自舉電容充電電壓增值必須大于放電電壓降低值,即: 根據(jù)式(2)、式(3)和式(4),則可求得滿足要求占空比值A(chǔ)。 設(shè)UD=15V,P=10kHz,UD3=UQ2=1V,R1=100Ω,RL=5Ω,U0=10V,C1=10μF,IB=0.002A,則可得到: 求得最小占空比A為7%,下面通過實驗驗證: (1)當(dāng)軸承線圈電流為0時,將PWM占空比設(shè)為0,自舉電容電壓逐漸降為0。 圖4 充電PWM占空比設(shè)為0 (2)當(dāng)軸承線圈電流為0時,將PWM占空比設(shè)為5%,小于7%,自舉電容電壓降到9V,小于開關(guān)管驅(qū)動欠壓保護(hù)電壓U0,存在損壞開關(guān)管的風(fēng)險。 圖5 充電PWM占空比設(shè)為5% (3)當(dāng)軸承線圈電流為0時,將PWM占空比設(shè)為15%,自舉電容電壓維持在13V,大于開關(guān)管驅(qū)動欠壓保護(hù)電壓U0,滿足開關(guān)管可靠驅(qū)動電壓。 圖6 充電PWM占空比設(shè)為15% 本文對半橋式磁懸浮軸承開關(guān)功率放大器的工作原理進(jìn)行了分析,并根據(jù)其工作特點,對自舉電容的充電方法進(jìn)行了優(yōu)化,可實現(xiàn)開關(guān)管的可靠驅(qū)動,大幅提升了磁懸浮軸承運行的穩(wěn)定性和可靠性,具有重要實用價值。

3 試驗及結(jié)果
4 結(jié)論
