轉向系統集成數據自動化設計方法
2021-08-23 09:21:17張道權王景超閆世明衛文濤
時代汽車 2021年16期
關鍵詞:自動化
張道權 王景超 閆世明 衛文濤
摘 要:在整車數據布置集成領域,轉向系統集成數據生成的普遍現狀,首先根據整車載荷情況選定轉向模塊,然后根據整車布置硬點進行轉向系統數據布置,通常是由在三維軟件中對數據進行手動拆分、約束,一方面工作效率低,另一方面手動約束容易出錯,影響數據準確性。本文通過對轉向系統(以C-EPS為例)運動規律、轉向模塊劃分、轉向約束規律等進行研究,通過Catia 知識工程模塊,建立轉向系統集成數據自動化模型,根據轉向模塊選項及整車硬點,快速自動生成系統集成數據,提高工作效率、數據準確性。
關鍵詞:集成領域 轉向系統 Catia知識工程 自動化
Automatic Design Method for Integrated Data of Steering System
Zhang Daoquan Wang Jingchao Yan Shiming Wei Wentao
Abstract:In the field of vehicle data layout integration, the general status of steering system integration data generation first selects the steering module according to the vehicle load situation, and then arranges the steering system data according to the hard points of the vehicle layout, usually by the three-dimensional software. Manually splitting and constraining data, on the one hand, is inefficient, and on the other hand, manual constraints are prone to errors and affect data accuracy. This paper studies the motion law, steering module division, and steering constraint law of the steering system (take C-EPS as an example). Through the Catia knowledge engineering module, the integrated data automation model of the steering system is established, based on the steering module options and the hard points of the whole vehicle, so as to quickly and automatically generate system integration data to improve work efficiency and data accuracy.
Key words:integration field, steering system, Catia knowledge engineering, automation
1 前言
在整車數據布置集成領域,轉向系統數據生成的普遍現狀,首先根據整車載荷情況選定轉向模塊,然后根據整車布置硬點轉向系統數據布置,通常是由在三維軟件中對數據進行手動拆分、約束,一方面工作效率低,另一方面手動約束容易出錯,影響數據準確性。
自動化設計是工業工程的發展方向,隨著計算機技術的發展,生產過程的自動化已經取得了重大突破,而產品研發領域集成數據的自動化卻成為了整個生產效率的瓶頸,參數化設計越來越得到了人們的重視。轉向系統集成數據的生成方法,顯然已不滿足集成數據自動化的發展要求,亟需改進。
2 轉向系統概況
2.1 轉向系統發展歷程
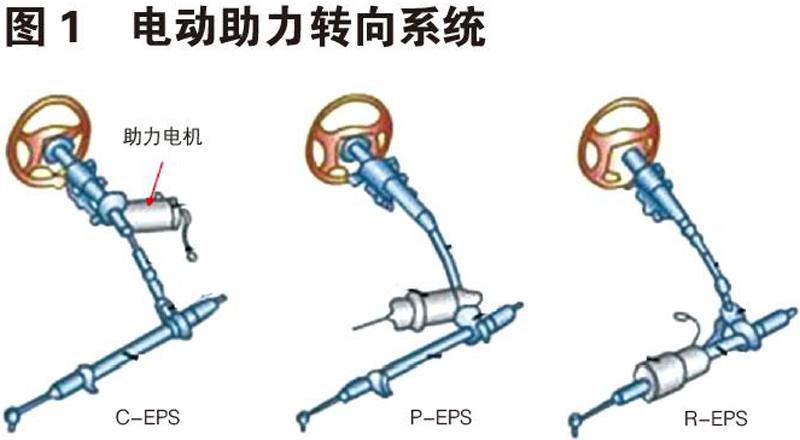
轉向系統是整車關鍵底盤系統,主要作用是根據駕駛員意愿改變或者保持汽車行駛方向的機構。汽車的發展歷程中,轉向系統經歷了五個發展階段:機械式轉向系統、液壓助力轉向系統、電控液壓助力轉向系統、電動助力轉向系統及線控轉向系統,目前乘用車領域主流是電動助力轉向系統,而線控轉向還在研究初步應用階段。電動助力轉向系統根據助力位置,又分為管柱助力式(C-EPS)、齒輪軸助力式(P-EPS)及齒條助力式(R-EPS)。
本文以管柱助力式轉向系統(C-EPS)為例進行轉向系統數據自動化集成介紹,其它形式以此類推。
2.2 C-EPS轉向系統工作原理
C-EPS轉向系統相對于P-EPS、D-EPS具有明顯成本優勢,在乘用車領域,特別是A級車型中得到廣泛應用。其主要工作原理如下:
a)管柱電控單元檢測駕駛員轉向意愿;
b)管柱電控單元根據駕駛意愿,控制轉向助力電機旋轉工作;
c)電機旋轉扭矩,經蝸輪蝸桿機構減速增扭后傳遞到中間軸;
d)中間軸傳遞的扭矩,經齒輪齒條機構,轉化成轉向器齒條的齒條力;
e)齒條力推動齒條移動,驅使車輪轉動,實現整車轉向。
3 轉向系統模塊及布置約束
3.1 轉向系統模塊
模塊化設計是將產品分成幾個部分,每個部分具有獨立的功能,稱為模塊架構。模塊具有一致的幾何接口和一致的輸入、輸出接口單元,相同種類的模塊互換,實現不同性能、數據布置要求。模塊化設計可減少開發成本,縮短研發周期,同時提高產品質量穩定性,這在汽車研發領域已形成的一個共識,也是汽車研發規劃的一個重點。
電動助力轉向系統根據轉向助力形式、轉向助力大小又劃分不同的轉向系統模塊,比如C-EPS轉向模塊,其中根據助力大小分為C-EPS轉向模塊①、C-EPS轉向模塊②等。
C-EPS按系統可拆分為轉向管柱模塊及轉向器模塊兩個一級模塊,進一步從工作原理及數據布置上,又可將轉向管柱、轉向器進一步分為15個二級模塊,具體劃分情況如表1。
3.2 轉向系統數據布置約束條件
根據轉向系統工作原理及運動規律,轉向系統數據布置約束,主要受兩方面影響:a、整車轉向系統布置硬點;b、轉向模塊本身尺寸。
整車轉向系統布置硬點,主要是指轉向盤中心點(涉及人機,決定了管柱上頂點),轉向梯形(決定了轉向器軸線、轉向拉桿內外球銷點)。轉向模塊本身尺寸,主要是指管柱減速機構及電機電控總成尺寸(決定了中間軸上十字軸點)、轉向器本體(轉向器輸入軸尺寸、中心距、軸交角等決定了中間軸下十字軸點)。當然,部分布置約束是受整車布置硬點及轉向模塊本身尺寸綜合影響,比如管柱下點、齒條內拉桿球頭,具體受約束影響情況如表2。
4 轉向系統數據常規生成方法
轉向系統數據集成普遍常規方法,根據整車載荷校核轉向助力需求,選擇轉向模塊,將轉向系統(以C-EPS為例)拆分成15個小模塊;根據整車硬點坐標,建立轉向系統硬點、線。然后通過將15個小模塊與轉向系統硬點、線約束,最終生成轉向系統數據。
常規方法存在不足:不同項目不同工程師間重復拆分工作、手動操作易出錯。
5 轉向系統自動化模型
Catia是英文Computer Aided Tri-Dimensional Interface Apllication的縮寫,是世界上一種主流的CAD/CAE/CAM一體化軟件。
Catia功能豐富,有零件設計、裝配設計、DMU運動機構模擬等等,其中知識工程顧問KWA模塊(Knowledge Advisor)的應用,可建立轉向系統數據自動化生成模型,通過輸入轉向模塊選項及整車硬點坐標,快速生成轉向系統集成數據。
5.1 知識工程顧問模塊
知識工程顧問(Knowledge Advisor)模塊能讓開發人員把產品的設計知識(包括尺寸關系式、尺寸約束、特征關系式等)用知識工程原理表達出來,組成一個產品的知識庫,通過約束關系,根據實際項目輸入,實現自動化設計。
5.2 轉向系統數據庫
根據平臺規劃,劃分了不同轉向模塊,如C-EPS模塊①、C-EPS②、P-EPS①、R-EPS②等。根據二級小模塊以上定義,對管柱、轉向器進行拆分,并與編號對應。
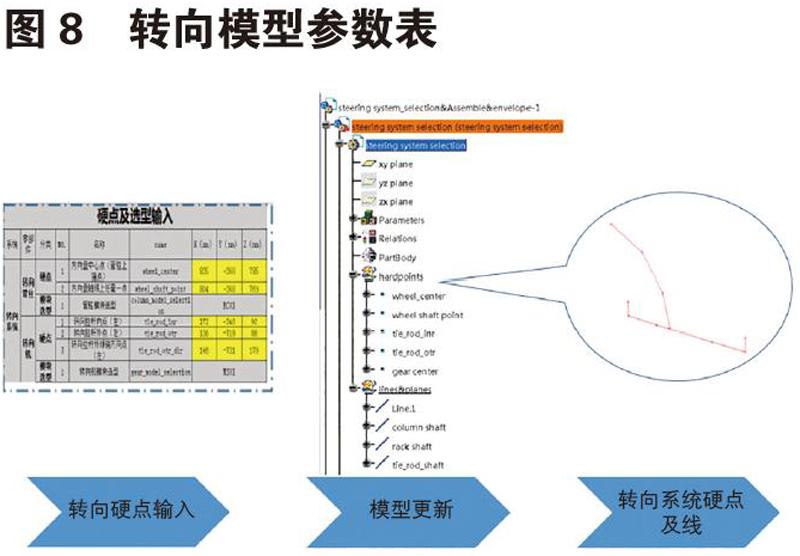
5.3 建立模型參數表
根據整車硬點,在知識工程顧問模塊中,建立轉向系統硬點及線約束,通過輸入轉向系統硬點,更新即可得到轉向系統的硬點及線。
5.4 轉向系統數據模型
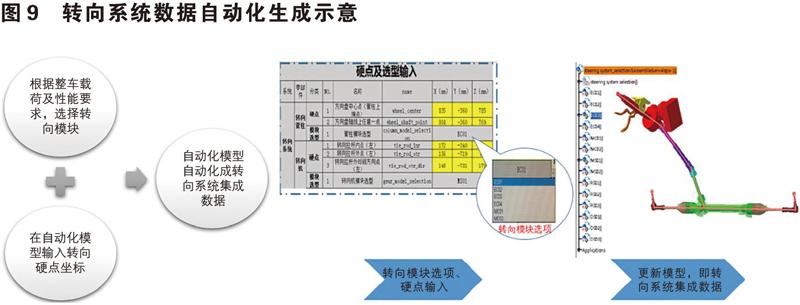
通過知識工程顧問模塊,建立轉向系統數據庫及參數化約束,最終搭建轉向系統數據庫與參數化約束一體化模型,通過輸入轉向模型選擇及整車硬點,即可得到轉向系統集成數據,此模型即轉向系統數據自動化模型。
在知識工程顧問模塊中,建立轉向模塊與轉向系統硬點及線的約束關系,實現轉向選項、轉向硬點輸入,更新模型即得到轉向系統集成數據,此即轉向系統自動化模型。
6 結束語
本文通過以C-EPS轉向系統為例,介紹一種系統集成數據自動化模型。在Catia知識工程模塊中,根據轉向系統工作原理,拆分轉向模塊數據并轉化為工程知識庫,建立轉向系統集成數據自動化模型,在輸入轉向模塊選項、轉向系統硬點的基礎上,可實現自動化快速生成系統集成數據,一方面提高工作效率,讓工程師有更多時間用在研究領域,一方面提高集成數據的準確性。
參考文獻:
[1]王智明,楊旭,平海濤,知識工程及專家系統[M].化學工業出版社,2006.
[2]余志生,汽車理論[M].機械工業出版社,2000.
[3]劉惟信,汽車設計[M].清華大學出版社,2001.
[4]劉宏新,賈儒,CATIA數字樣機運動仿真技術[M].機械工業出版社,2016.
[5]趙萬忠,王春燕,汽車動力轉向技術[M].清華大學出版社,2018.
猜你喜歡
經營者(2016年12期)2016-10-21 07:39:01
中國科技博覽(2016年19期)2016-10-19 14:47:24
中國科技博覽(2016年19期)2016-10-19 13:40:37
中國科技博覽(2016年18期)2016-10-19 07:01:13
中國市場(2016年36期)2016-10-19 03:40:15
科學與財富(2016年28期)2016-10-14 21:28:54
科學與財富(2016年28期)2016-10-14 19:52:27
科學與財富(2016年28期)2016-10-14 19:49:55
科學與財富(2016年28期)2016-10-14 19:33:38
科學與財富(2016年28期)2016-10-14 03:14:22
