基于滑模控制的能饋型交流電子負載的研究
2021-08-24 07:57:54廖冬初蔡華鋒
湖北工業大學學報 2021年4期
張 鑫, 廖冬初,2, 蔡華鋒,2, 周 浩
(1 湖北工業大學 電氣與電子工程學院, 湖北 武漢 430068;2 湖北工業大學 太陽能高效利用湖北省協同創新中心, 湖北 武漢 430068)
由于傳統電源出廠測試使用的模擬負載存在巨大能源消耗的問題,將測試能量回饋到待測電源輸入端的交流電子負載具有能耗低、體積小、易調節等優點。目前,直流能量回饋型交流電子負載采用兩級電路,前級是負載模擬單元,采用三相電壓型PWM(脈沖寬度調制)整流電路,后級是能量回饋單元,采用移相全橋電路[1]。經典的PID(比例-積分-微分)控制在三相電壓型PWM整流電路中已經得到了廣泛的應用[2]。但是三相電壓型PWM整流器是一個多輸入多輸出的強耦合非線性系統,傳統的PID控制方法應用到三相電壓型PWM整流電路中,仍存在魯棒性差、難以滿足輸入電流快速響應指令的要求等[3]。
滑模變結構控制誕生于20世紀50年代,它對系統模型要求不高,而且還具有系統響應速度快、抗干擾能力強以及實現簡單等諸多優點[4]。目前,國內外針對滑模控制抖振問題的研究很多,其中典型的是準滑模方法、高階滑模方法、動態滑模方法和趨近律方法[5]。雙冪次趨近律是一種改進的冪次趨近律,提高了系統狀態趨近滑模面的速度[6]。積分滑模面能夠減小穩態誤差,同時控制律中不會出現狀態變量的二階導數,實現起來比較簡單[7]。
采用傳統的雙閉環控制策略在負載變化及電壓波動時,直流母線電壓波動較大,響應速度慢,穩態性能差[8]。為了改善三相VSR(電壓整流器)的性能,負載模擬單元采用直接電流控制,能量回饋單元采用雙環控制,因篇幅有限,本文主要對負載模擬單元展開研究。
1 負載模擬單元的數學模型
三相電壓型PWM整流器(VSR)主電路如圖1所示。ea、eb、ec、ua、ub、uc分別為三相電網相電壓和三相VSR交流側相電壓;ia、ib、ic為三相VSR交流側相電流;L、R分別為交流側單相濾波電感和單相輸入線路等效電阻;C為母線電容;RL為母線電容的放電電阻。
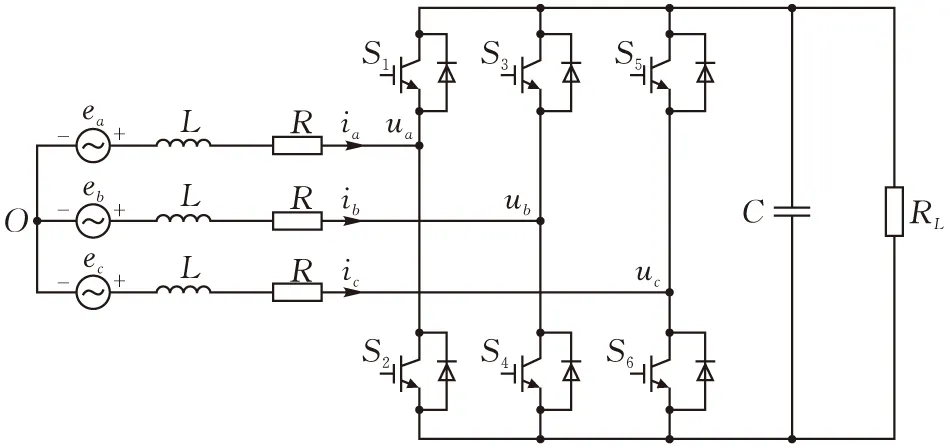
圖 1 三相VSR主電路結構圖
三相電壓型整流器在兩相同步旋轉坐標系下的數學模型為:

(1)
式中:id和iq分別為相電流ia、ib、ic在dq坐標系下的交流側電流;ed和eq分別為相電壓ea、eb、ec在dq坐標系下的交流側電壓;Sd和Sq分別為開關函數在dq坐標系下的變量;ω為三相電網相電壓角頻率。式(1)表明三相電壓型PWM整流器是一個多輸入多輸出的強耦合非線性系統,故無法采用一般的線性化控制技術實現精確解耦控制。
2 滑模控制器設計
系統在滑模變結構控制器作用下,可以沿設定的狀態軌跡進行滑模運動,且不受系統被控對象的參數及外界擾動的影響,在滑模變結構控制下系統具有良好的魯棒性。在四種經典的趨近律中,指數趨近律是趨近效果比較好的一種趨近律,指數趨近律的趨近速度隨著與滑模切換面距離的變化而變化。
2.1 一般指數趨近律控制器
一般指數趨近律:

(2)
式中:ε,k都是大于零的常數,ε表示切換函數的幅值,k表示指數趨近項系數。
從式(2)可知,一般指數趨近律由兩項組成,當系統遠離滑模切換面時,誤差變量e相對較大,此時等速趨近項和指數趨近項共同作用收斂于滑模面,k越大,系統響應速度越快,系統抖振越大;當系統靠近滑模切換面時,誤差變量e相對較小,指數趨近項-k·s相對較小,等速趨近項-ε·sgn(s)發揮主導作用,ε越小,系統趨近速度越慢,系統抖振越小。因此,一般指數趨近律無法同時滿足系統響應速度和抖振的控制要求。
2.2 改進型指數趨近律控制器
為了減弱經典趨近律控制器所帶來的抖振問題,同時保證系統的響應速度,在經典指數趨近律基礎上進行改進,得出的指數趨近律如下:
(3)
上式中的變速趨近項ε·s2·sgn(s)起到了關鍵作用,趨近速度大小與s2成正比。當系統狀態點離滑模面比較遠時,趨近速度比較大;隨著控制器對系統誤差的調節,系統狀態點離滑模面越來越近,趨近速度也越來越小。此時系統逐漸趨于平衡,系統在滑模面上的抖動也將是經典趨近律的抖動的平方次。所以,采用了變速趨近項代替一般指數趨近律中的等速趨近項,不但能增加系統跟隨給定的快速性,而且能減弱滑模切換面上的抖振問題。
觀察式(3),引起系統在滑模面上抖振的主要原因是由于開關函數sgn(s)的正負切換特性,因此,為了進一步減弱抖振問題,本文提出雙曲正切函數tanh(a·s)來代替sgn(s),因此本文的指數趨近律改進為
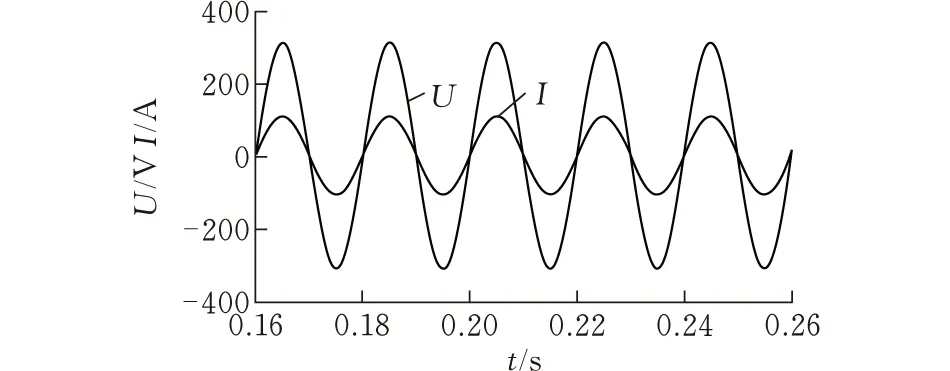
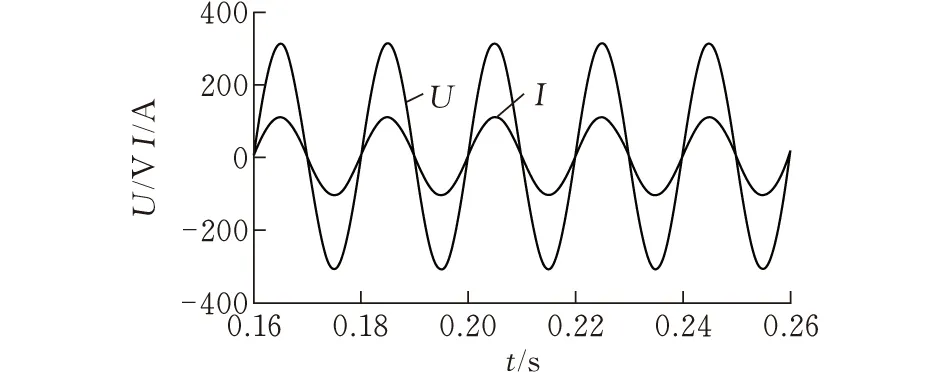
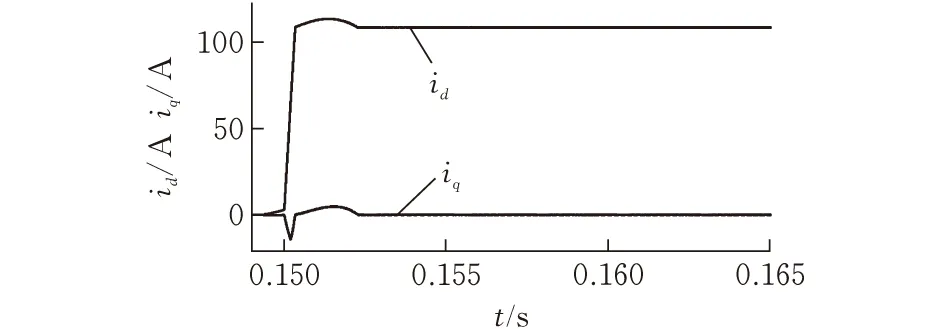
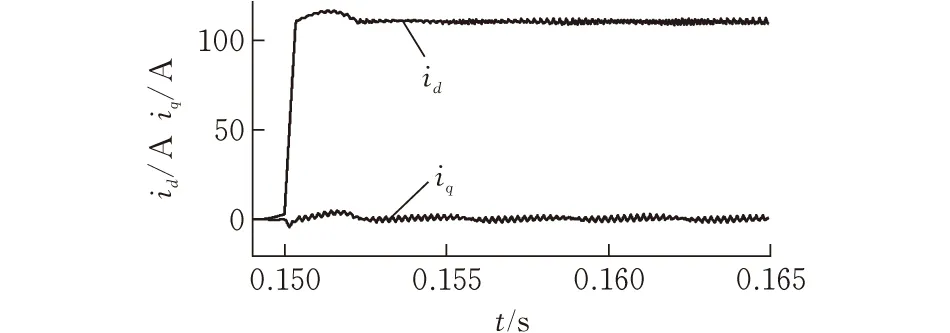
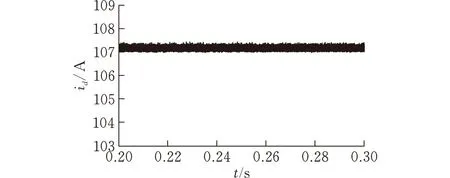
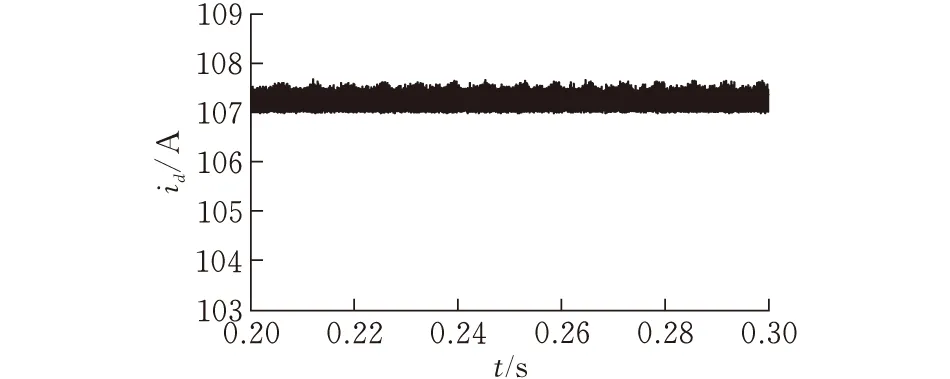
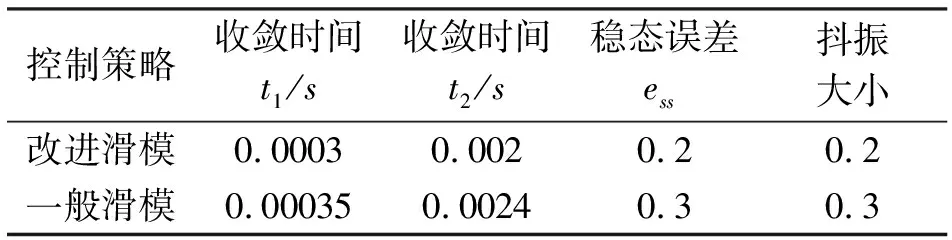
圖2給出不同a值下的tanh(a·s)變化曲線,可以看出當s>3或s<-3時,tanh(a·s)≈sgn(s);當-3 圖 2 tan h(a·s)變化曲線 (4) 滑模面的選擇直接關系到滑動控制過程的穩定性、存在性、可達性以及良好動態性能等問題。傳統線性滑模面控制在系統跟蹤過程中會存在一定的穩態誤差,而積分滑模面在傳統線性滑模面基礎上增加了積分項,在跟蹤過程中不存在穩態誤差且具有良好的動態性能。以兩相靜止坐標系的d軸為例,選取積分滑模面s為: (5) 選取李雅普諾夫函數為: (6) 對式(6)兩端求導,可得: (7) 根據式(4)趨近律結合式(5)滑模面和式(1)被控對象數學模型可得系統在兩相靜止坐標系d軸上的滑模控制器輸出為: 系統在兩相靜止坐標系q軸上的滑模控制器輸出為: 為驗證滑模控制對于三相VSR負載輸入電流具有較好的跟蹤性能和抗干擾能力,在Matlab中進行仿真,根據以上設計搭建模型,負載模擬單元仿真參數:交流側電感2 m H,線路等效電阻0.01Ω,輸入預充電電阻2Ω,直流母線電容8000 uF。能量回饋單元仿真參數:諧振電感10 uH,隔直電容72 uF,高頻變壓器1:1.5,濾波電感800 uH,濾波電容54 uF,輸出預充電電阻20Ω。交流電子負載主要技術指標見表1。 表1 交流電子負載主要技術指標 在額定功率下,輸入電流有功電流給定值為107 A,無功電流給定值為0。以輸入單相電壓和電流為例分析,輸入單相電壓峰值為311 V,輸入側單相電壓和電流波形見圖3。 (a)改進型指數 (b)一般指數圖 3 兩種控制策略下的輸入單相電壓和電流波形 在兩種控制策略下,輸入單相電流峰值均能達到107 A,并且輸入電流與輸入電壓相位相同,頻率一致,輸入電流實現跟蹤控制,交流電子負載在額定功率運行。 對輸入電流進行坐標變換,得到輸入電流的d軸分量Id和q軸分量Iq(圖4)。由圖4a可知,收斂時間分別為t1=0.0003和t2=0.002。由圖4b可知,收斂時間分別為t1=0.00035和t2=0.0024。可以看出,在改進型指數趨近律控制下,系統的收斂速度加快了12%,因此在趨近律中引入s2項可加快系統收斂速度。 (a)改進型指數 (b)一般指數圖 4 兩種控制策略下的輸入電流收斂過程 以輸入電流d軸分量Id的穩定運行波形為例,分析雙曲正切函數對輸入電流的抖振現象具有減弱作用(圖5)。系統以額定功率運行,輸入電流的d軸分量Id給定值為107A。由圖5a可知,輸入電流的d軸分量Id穩態值為107.2 A,穩態誤差為0.2 A,抖振幅值為0.2 A。由圖5b可知,輸入電流d軸分量Id穩態值為107.3 A,穩態誤差為0.3 A,抖振幅值為0.3 A。 (a)改進型指數 (b)一般指數圖 5 兩種控制策略的輸入電流抖振波形 可以看出,采用雙曲正切函數,輸入電流的穩態誤差較小,抖振幅值也較小,對系統穩態性能具有較好的優化效果。結合圖4和圖5輸入電流波形,具體性能指標對比見表2。由表2可知,采用雙曲正切函數替換開關函數,對輸入電流的抖振具有明顯減弱效果,從而提高輸入側的功率因數及抑制輸入電流高頻諧波,減少對交流電網的諧波污染。采用變指數趨近項替換一般指數趨近項,加快了系統收斂速度,使系統更快趨于穩定。 表2 兩種控制策略性能指標對比 為提高交流電子負載的跟蹤性能和穩態性能,對于負載模擬單元,提出了改進型指數趨近律的直接電流控制策略。通過仿真驗證,和一般指數趨近律控制相比較,采用改進型指數趨近律的滑模變結構控制可進一步減弱抖振問題,減小穩態誤差,并且加快系統收斂速度,因此在趨近律中引入s2項和雙曲正切函數具有較好的控制效果。不過收斂速度和抖振幅值等系統指標有待進一步提升。
2.3 滑模面的設計


3 仿真驗證

4 結論
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
科教新報(2022年12期)2022-05-23 06:34:16
今日農業(2021年14期)2021-10-14 08:35:28
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
海峽姐妹(2020年8期)2020-08-25 09:30:18
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
人民中國(日文版)(2015年10期)2015-04-16 03:53:58