漁船主機(jī)功率在線監(jiān)測研究
2021-08-26 08:04:18王永鼎陳晨超
漁業(yè)現(xiàn)代化 2021年4期
王永鼎,陳晨超
(1上海海洋大學(xué)工程學(xué)院,上海 201306;2上海海洋可再生能源工程技術(shù)研究中心,上海 201306)
漁業(yè)在中國農(nóng)業(yè)經(jīng)濟(jì)的發(fā)展中占據(jù)了非常重要的部分,截至2019年末,中國現(xiàn)役漁船總數(shù)為73.12萬艘,約全球總數(shù)的1/6[1]。隨著海洋漁業(yè)資源的逐步衰退,捕撈成本不斷增加,中國海洋捕撈業(yè)的競爭變得更加激烈,近年來新建漁船逐漸向大型化方向發(fā)展[2]。目前漁船存在“大機(jī)小標(biāo)”的現(xiàn)象,即漁船主機(jī)的實(shí)際功率大于其銘牌上標(biāo)定的額定功率[3],影響漁船的航行安全和管理。由于受現(xiàn)有技術(shù)不成熟的限制,驗(yàn)船師在現(xiàn)場無法使用簡單有效的方法來鑒別漁船主機(jī)的實(shí)際功率,同時國內(nèi)基層的漁船檢驗(yàn)單位也缺乏可靠的設(shè)備來檢測漁船主機(jī)的實(shí)際功率,對“大機(jī)小標(biāo)”無法精確識別。對漁船主機(jī)功率在線監(jiān)測進(jìn)行研究,可以為相關(guān)單位收集漁船主機(jī)功率信息,管理漁船捕撈作業(yè),優(yōu)化船-機(jī)-槳匹配提供參考,有助于減少和避免作業(yè)中事故的發(fā)生,為漁船航行提供安全保障[4]。
對于大部分船舶,檢測其主機(jī)功率最直接有效的方法仍是對其傳動軸轉(zhuǎn)速和扭矩進(jìn)行測量。20世紀(jì)70年代開始,國外已有學(xué)者開展對船舶主機(jī)功率監(jiān)測的研究。如美國麻省理工學(xué)院的光纖扭矩傳感器[5],美國佛羅里達(dá)大學(xué)的紅外線扭矩測量儀[6],陶太克公司(TOROD-UCTOR)的無接觸式磁彈性扭矩儀,挪威KYMA公司的KPM-P型軸功率測量系統(tǒng)[7],德國馬霍克公司的基于振弦式扭矩測量儀技術(shù)[8],日本小野測器公司的磁電式扭矩測量儀[9]以及日本福崗九州大學(xué)基于磁致伸縮效應(yīng)研制的新型磁頭扭矩傳感器[10]等。目前對于船舶功率測量的方法不斷改進(jìn),并向非接觸式測量轉(zhuǎn)變。
中國對船舶主機(jī)功率的研究起步較晚,但是發(fā)展較快,現(xiàn)已具備一定的規(guī)模。冷泠等[11]對柴油機(jī)子系統(tǒng)控制器進(jìn)行研究,分析了基于智能控制算法的船舶推進(jìn)柴油機(jī)應(yīng)用中的優(yōu)缺點(diǎn)。董俊威[12]設(shè)計(jì)了一種基于鐵基非晶材料的逆磁致伸縮扭矩傳感器,以實(shí)現(xiàn)船舶軸系扭矩的非接觸實(shí)時測量。黃溫赟等[13]對漁船船型參數(shù)和主機(jī)額定功率數(shù)據(jù),通過神經(jīng)網(wǎng)絡(luò)算法,建立船型參數(shù)和主機(jī)額定功率之間的預(yù)測模型,并運(yùn)用該模型對現(xiàn)有拖網(wǎng)漁船的主機(jī)額定功率進(jìn)行估算。漁船的作業(yè)情況相較商船、客船、貨船等大型船舶更為復(fù)雜,國內(nèi)學(xué)者通過不斷研究,對漁船的監(jiān)測手段更為豐富,并將國外部分成熟的技術(shù)引進(jìn)至漁船監(jiān)測中,提高了漁船的自動化水平。
1 在線監(jiān)測系統(tǒng)總體設(shè)計(jì)
中國現(xiàn)有漁船數(shù)量眾多,通過對監(jiān)測系統(tǒng)的模塊化設(shè)計(jì)可以更好地適應(yīng)更多的漁船。模塊化設(shè)計(jì)不僅可以標(biāo)準(zhǔn)化監(jiān)測系統(tǒng)各個模塊之間的通信,使各個模塊在硬件選型上具備一定的互換性,還有利于監(jiān)測系統(tǒng)的維護(hù)與更新,降低監(jiān)測系統(tǒng)重新布置的成本。同時模塊化設(shè)計(jì)對各個模塊進(jìn)行獨(dú)立封裝,增強(qiáng)各個模塊在惡劣環(huán)境下正常工作的能力,降低漁船機(jī)艙惡劣的工作環(huán)境對監(jiān)測系統(tǒng)工作壽命的影響。除此之外,通過模塊化設(shè)計(jì)可以靈活布置各個模塊的位置,充分利用機(jī)艙空間,解決漁船主機(jī)機(jī)艙空間不足的難題。對在線監(jiān)測系統(tǒng)各個功能進(jìn)行模塊化設(shè)計(jì),主要分為數(shù)據(jù)采集模塊、數(shù)據(jù)傳輸模塊以及數(shù)據(jù)處理模塊,總體設(shè)計(jì)如圖1所示。
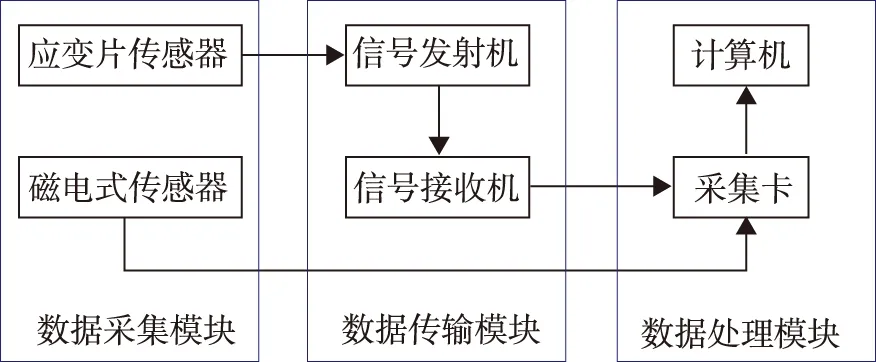
圖1 測量系統(tǒng)總體技術(shù)方案圖Fig.1 Overall technical scheme of the measurement system
數(shù)據(jù)采集模塊采用磁電式轉(zhuǎn)速傳感器以及應(yīng)變式扭矩傳感器,實(shí)現(xiàn)對漁船捕撈作業(yè)過程中的轉(zhuǎn)速、扭矩信號的采集,并通過標(biāo)準(zhǔn)化的接口與數(shù)據(jù)傳輸模塊相連;數(shù)據(jù)傳輸模塊由信號發(fā)射機(jī)和信號接收機(jī)組成,信號發(fā)射機(jī)與數(shù)據(jù)采集模塊相連,信號接收機(jī)與采集卡相連,主要實(shí)現(xiàn)采集信號的無線傳輸;數(shù)據(jù)處理模塊采用數(shù)據(jù)采集卡以及計(jì)算機(jī),通過LabView強(qiáng)大的虛擬儀器功能實(shí)現(xiàn)對采集信號的處理,最終完成對漁船主機(jī)功率的在線監(jiān)測。
2 數(shù)據(jù)采集模塊的設(shè)計(jì)
2.1 主機(jī)功率測量
數(shù)據(jù)采集是指對設(shè)備被測的模擬或數(shù)字信號進(jìn)行采集并上傳到上位機(jī)中的過程[14]。與商船、客船等大型船舶相比,漁船主機(jī)功率監(jiān)測發(fā)展較為落后,目前已有的方案或多或少存在傳感器安裝困難、信號傳輸距離受限、測量精度低、實(shí)時性差以及持續(xù)測量時間短等問題,沒有形成系統(tǒng)性的測量方案[15-17]。由于漁船作業(yè)過程中工況較為復(fù)雜,載重量隨著作業(yè)過程逐步增加,需要一種簡單有效,可以直接測量主機(jī)功率的方法。而通過測量主機(jī)的輸出扭矩,再結(jié)合其轉(zhuǎn)速,通過計(jì)算就可以較為直接地得到主機(jī)的實(shí)時功率。其公式[18]如下:
(1)
式中:P—軸功率,W;T—軸系的輸出扭矩,N·m;n—軸系的轉(zhuǎn)速,r/min。
由式(1)可知,軸功率與輸出扭矩和輸出軸轉(zhuǎn)速的乘積成正比,因此理論上只要采集到漁船主機(jī)的扭矩和轉(zhuǎn)速信號,便可以通過計(jì)算機(jī)或單片機(jī)等處理單元來計(jì)算得到功率值。
2.2 轉(zhuǎn)速測量設(shè)計(jì)
目前國內(nèi)外研究在轉(zhuǎn)速的測量上大多采用非接觸式測量,常用傳感器種類包括光電式、磁電式、霍爾式和紅外式等[19]。磁電式傳感器是基于電磁感應(yīng)原理進(jìn)行工作,實(shí)現(xiàn)各種導(dǎo)磁材料的非接觸轉(zhuǎn)速測量,并轉(zhuǎn)換為交變電壓信號輸出。其一般是由定子、轉(zhuǎn)子和線圈等組成,性能穩(wěn)定,可以較好地適應(yīng)漁船主機(jī)惡劣的工作環(huán)境。本研究采用CZ300磁電式轉(zhuǎn)速傳感器,該傳感器工作不需要供電,轉(zhuǎn)速測量范圍較大,工作溫度滿足船艙工況要求,內(nèi)置了濾波電路可以直接輸出近似正弦波的模擬信號。安裝時只要對準(zhǔn)主軸齒輪,將傳感器固定在一定距離內(nèi)即可進(jìn)行測量,安裝方式如圖2。
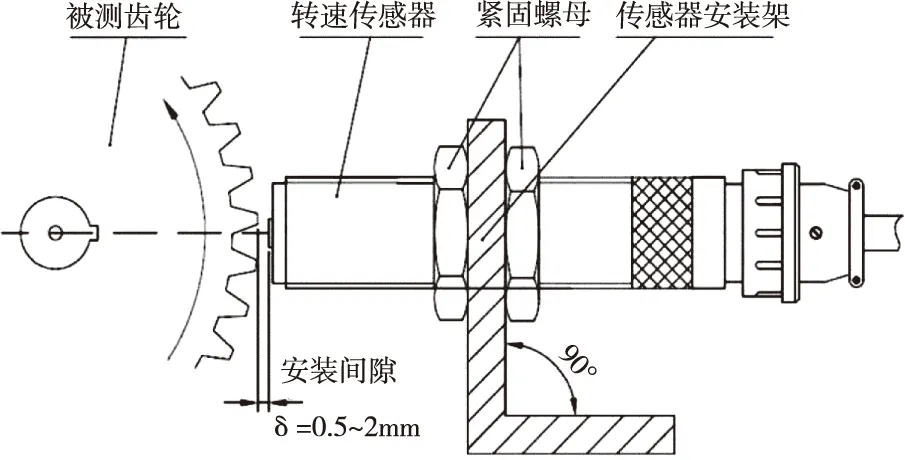
圖2 CZ300磁電式轉(zhuǎn)速傳感器安裝示意圖Fig.2 Installation diagram of CZ300 magnetoelectricspeed sensor
2.3 扭矩測量設(shè)計(jì)
扭矩測量的精度會對功率大小的準(zhǔn)確性產(chǎn)生很大的影響。扭矩測量的方法從原理上進(jìn)行分類大致可以分為3種,即能量轉(zhuǎn)換法、平衡力法和傳遞法[20]。能量轉(zhuǎn)換法應(yīng)用非常有限,計(jì)算扭矩時測量誤差較大;平衡力法常用于實(shí)驗(yàn)室或廠商對返修船舶柴油機(jī)或新建船舶柴油機(jī)等進(jìn)行性能檢測;相比上述兩種扭矩測量方法,通過傳遞法進(jìn)行扭矩的測量靈活性更強(qiáng),更適用于動態(tài)扭矩的測量,因此國內(nèi)外廣泛采用傳遞法進(jìn)行船舶軸扭矩測量,主要包括磁彈式、應(yīng)變片式、電容式、光纖式、光電式、鋼弦式等[21]。本研究采用應(yīng)變片式扭矩傳感器進(jìn)行扭矩測量,其應(yīng)用廣泛,性能穩(wěn)定可靠且有較強(qiáng)的抗干擾能力,不僅使用壽命長、體積小、重量輕,而且成本相對較低,可以很好地適應(yīng)漁船主機(jī)的工作環(huán)境。當(dāng)傳動軸在扭矩作用下,材料表面會發(fā)生變形,在與軸線成±45°的方向上產(chǎn)生最大的壓應(yīng)力和拉應(yīng)力,并同時產(chǎn)生最大應(yīng)變值。本研究采用分布式貼片法粘貼應(yīng)變片,不僅可以避免傳統(tǒng)貼片法在測量時應(yīng)變片相互之間的影響,還可以消除傳動軸工作時產(chǎn)生的彎矩對測量的影響。在與軸線成±45°的方向粘貼應(yīng)變片,并沿軸每隔90°圓周分布,如圖3所示。
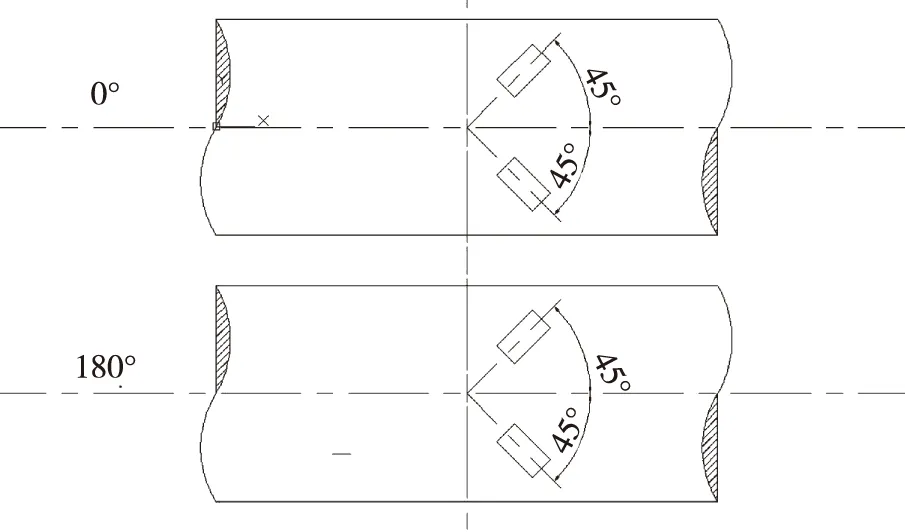
圖3 應(yīng)變片粘貼示意圖Fig.3 Schematic diagram of strain gauge bonding
為提高應(yīng)變片在受到扭矩作用下的檢測靈敏度以及消除彎矩、溫度等其他干擾因素對測量精度的影響,根據(jù)電橋的和差特性,將4片相同的應(yīng)變片組成全橋電路,對測量誤差進(jìn)行補(bǔ)償并增加其測量靈敏度,同時消除膨脹系數(shù)不同產(chǎn)生的附加應(yīng)變影響[22],如圖4所示。
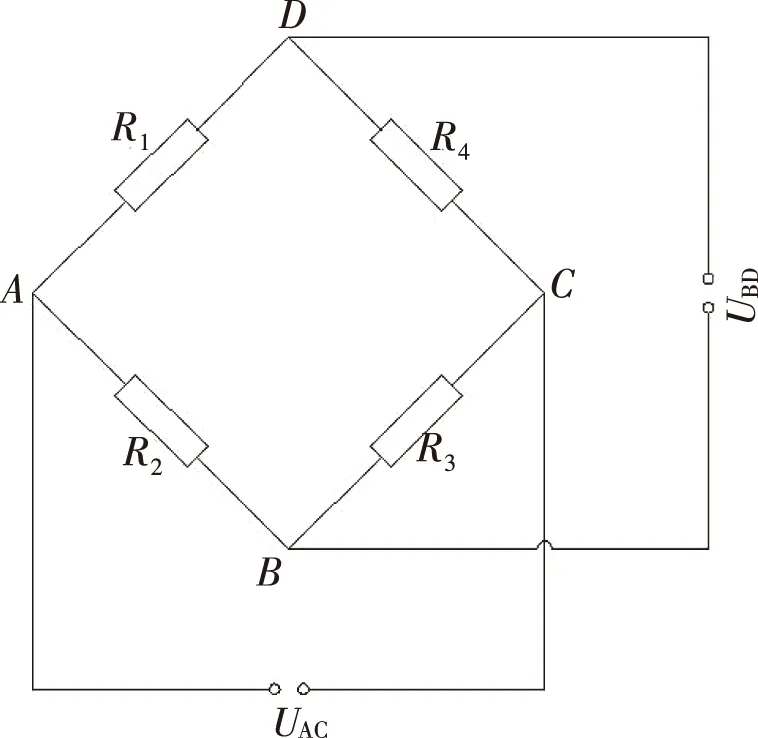
圖4 測量電路原理圖Fig.4 Schematic diagram of measuring circuit
為簡化橋路設(shè)計(jì),4片應(yīng)變片的阻值相同,即R1=R2=R3=R4=R。當(dāng)軸受到扭矩的作用時,應(yīng)變片發(fā)生形變,其電阻的變化量為ΔR1、ΔR2、ΔR3、ΔR4,此時電橋輸出電壓UBD與各橋臂電阻之間的關(guān)系[23]如下:
(2)
2.4 數(shù)據(jù)采集卡設(shè)計(jì)
由于傳感器采集的數(shù)據(jù)是連續(xù)變化的正弦波信號,不能直接進(jìn)入計(jì)算機(jī)處理,必須經(jīng)量化后成為數(shù)字信號才能被計(jì)算機(jī)接受[24],因此需要經(jīng)過采集卡中的A/D轉(zhuǎn)換器將傳感器采集的信號轉(zhuǎn)換為數(shù)字信號。由于對漁船主機(jī)實(shí)際運(yùn)行時的狀態(tài)進(jìn)行采集,對容量和速度要求較高,本研究選用USB3106采集卡實(shí)現(xiàn)數(shù)據(jù)采集,該采集卡共有16個通道可對信號進(jìn)行采集,采樣頻率最高可達(dá)500 KS/s,AD轉(zhuǎn)換時間≤1.25 μs,存儲溫度范圍廣,可以更好地適應(yīng)漁船的機(jī)艙環(huán)境。
3 數(shù)據(jù)傳輸模塊設(shè)計(jì)
數(shù)據(jù)傳輸模塊主要實(shí)現(xiàn)對傳感器采集信號的傳輸,通過信號發(fā)射機(jī)與接收機(jī)來進(jìn)行遠(yuǎn)程傳輸。采用無線傳輸?shù)姆绞剑梢暂^好地適應(yīng)漁船主機(jī)狹小的工作環(huán)境。本研究選擇TT9000系列遙測系統(tǒng),其體積小、堅(jiān)固耐振、調(diào)整方便、抗干擾性強(qiáng),可以在漁船捕撈作業(yè)過程中保持穩(wěn)定的工作能力。信號發(fā)射機(jī)與信號接收機(jī)主要性能指標(biāo)見表1。
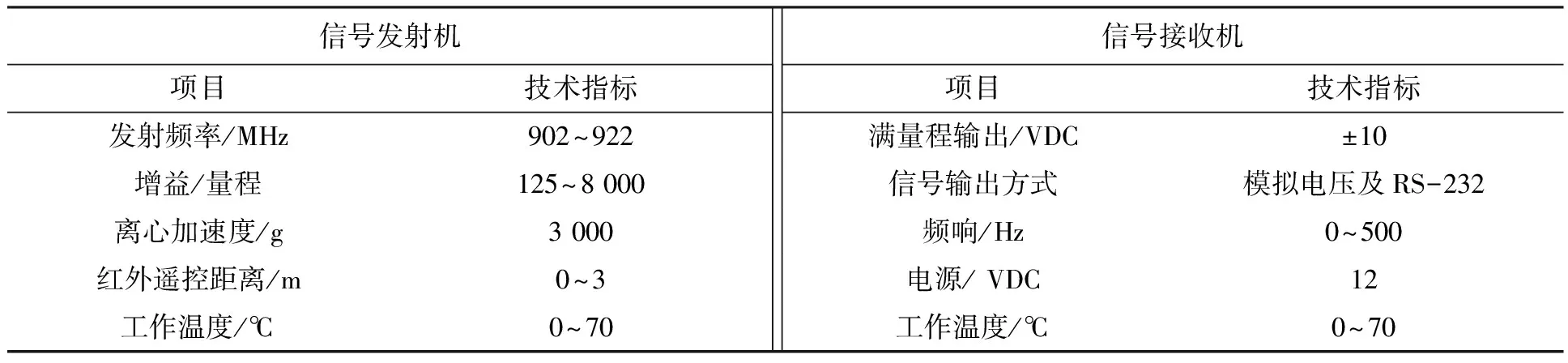
表1 數(shù)據(jù)傳輸模塊主要技術(shù)指標(biāo)Tab.1 Main technical indicators of data transmission module
4 數(shù)據(jù)處理模塊設(shè)計(jì)
4.1 信號預(yù)處理
本研究中信號的預(yù)處理包括濾波處理以及放大處理,避免信號在采集過程中受到各種噪聲的干擾,提高信噪比[25]。濾波通常有硬件濾波和軟件濾波兩種實(shí)現(xiàn)方式[26]。本研究采用硬件濾波,相比軟件濾波,對處理設(shè)備的要求更低,易于實(shí)現(xiàn)并且處理速度快[27]。采用一階有源低通濾波電路進(jìn)行濾波,降低高頻噪聲對信號的干擾,電路如圖5a所示。采用三運(yùn)放差分放大電路對應(yīng)變片輸出的電壓信號進(jìn)行放大,該電路可以提高共模抑制比,有較好的差分放大線性度,電路如圖5b所示。
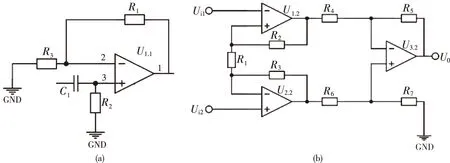
圖5 預(yù)處理電路圖Fig.5 Pretreatment circuit diagram
4.2 信號處理
本研究采用計(jì)算機(jī)作為處理單元,使用LabView平臺對監(jiān)測系統(tǒng)的工作進(jìn)行控制,并對信號進(jìn)行計(jì)算,獲取轉(zhuǎn)速、扭矩以及功率的大小。信號在經(jīng)過濾波電路后,需要在數(shù)據(jù)采集卡內(nèi)進(jìn)行A/D轉(zhuǎn)換,再進(jìn)入計(jì)算機(jī)處理。首先對信號進(jìn)行零均值化處理,剔除外部影響帶來的偏差,再對信號前后10%的數(shù)據(jù)進(jìn)行刪減,并采用拉依達(dá)準(zhǔn)則,剔除粗大誤差,取平均值得到測量結(jié)果[28]。轉(zhuǎn)速信號采用零點(diǎn)法進(jìn)行計(jì)算,從瞬時轉(zhuǎn)速原始信號中求取瞬時轉(zhuǎn)速,用插值的方法找到原始波形與零線的交點(diǎn)序列{p1、p2、…、pmax},第i個分度時的瞬時轉(zhuǎn)速vi如下:
(3)
式中:vi—瞬時轉(zhuǎn)速,r/min;fs—采樣頻率,Hz;pi+2、pi—波形與零線的交點(diǎn)序列。
扭矩值、應(yīng)變值、電橋激勵電壓之間的關(guān)系[29]如下:
(4)
(5)
式中:T—扭矩,N·m;D—傳動軸外徑,m;G—傳動軸剪切模量,MPa;μ—泊松比;ε—應(yīng)變值;ΔE—電橋輸出信號,mV;U—電橋激勵電壓,mV;K—應(yīng)變片靈敏系數(shù)。
5 試驗(yàn)與分析
5.1 試驗(yàn)平臺
本研究選擇濰柴WP10系列柴油機(jī)WP10C287-21型進(jìn)行監(jiān)測值與標(biāo)定值的對比試驗(yàn)。WP10C287-21型柴油機(jī)的標(biāo)定功率為211 kW,標(biāo)定轉(zhuǎn)速為2 100 r/min。選擇BF350-3HA型扭矩測量專用應(yīng)變片,其靈敏度為(2.08±0.10)%,阻值為(350±1.20)Ω,敏感柵的大小為(3.0×5.2)mm,基底尺寸為(8.8×6.8)mm。試驗(yàn)傳動軸軸徑為205 mm,材料為45#鋼,彈性模量為210 GPa,泊松比為0.3。主要試驗(yàn)步驟如下:
首先對轉(zhuǎn)速傳感器進(jìn)行安裝與標(biāo)定,將CZ300磁電傳感器按照說明書要求,安裝在相距測速齒輪一定距離處,在確認(rèn)磁電傳感器可以正常采集轉(zhuǎn)速信號后,對磁電式轉(zhuǎn)速傳感器的安裝間隙進(jìn)一步調(diào)整,使輸出信號的峰值在經(jīng)過濾波放大后連續(xù)穩(wěn)定在2.0 V左右。
其次對應(yīng)變片以及遙測系統(tǒng)發(fā)射機(jī)進(jìn)行粘貼與標(biāo)定,選取4片相同的應(yīng)變片,使用高精度萬用表對應(yīng)變片的阻值進(jìn)行測量,確保其誤差值在允許范圍之內(nèi)。接著對軸表面進(jìn)行清潔,按±45°方向分別使用502號膠粘貼應(yīng)變片并滾壓其表面擠出多余的膠水和氣泡,固定后在應(yīng)變片引線附近貼上接線端子,同時在引線下面粘貼一層絕緣膠布,保證應(yīng)變片與被測處之間絕緣且應(yīng)變片沒有被短路或斷路。在應(yīng)變片與遙測系統(tǒng)信號發(fā)射機(jī)連接后,將發(fā)射機(jī)粘貼固定在軸上,并對焊接端子處使用防護(hù)劑進(jìn)行防潮、防濕處理。確認(rèn)應(yīng)變片與遙測系統(tǒng)正常工作后對其采集信號進(jìn)行標(biāo)定,控制柴油機(jī)在不同功率下進(jìn)行工作,將測量值與標(biāo)定值進(jìn)行對比,保證測量誤差在允許范圍內(nèi)。
最后對柴油機(jī)功率在線監(jiān)測進(jìn)行試驗(yàn),將遙測系統(tǒng)接收機(jī)以及CZ300磁電轉(zhuǎn)速傳感器的輸出端與數(shù)據(jù)采集卡相連,通過LabView軟件對信號的采集進(jìn)行控制。設(shè)置采樣頻率為5 KS/s并進(jìn)行連續(xù)采樣,通過柴油機(jī)性能測試平臺控制系統(tǒng)對柴油機(jī)的油門和負(fù)荷進(jìn)行控制,使柴油機(jī)在不同的工況下進(jìn)行工作。
5.2 試驗(yàn)結(jié)果
柴油機(jī)依次按照標(biāo)定功率的25%、50%、75%、90%、100%、110%運(yùn)行,在穩(wěn)定運(yùn)轉(zhuǎn)5 min后進(jìn)行各項(xiàng)參數(shù)的記錄,每組數(shù)據(jù)測試5次取平均值,部分試驗(yàn)數(shù)據(jù)如表2所示。
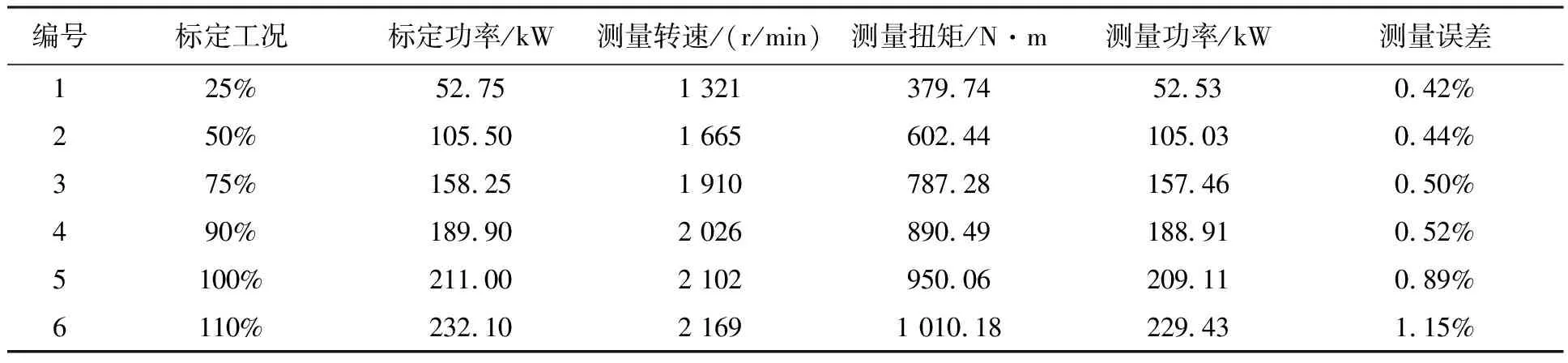
表2 試驗(yàn)數(shù)據(jù)記錄Tab.2 Experimental data recording
5.3 結(jié)果分析
對表2內(nèi)試驗(yàn)記錄的數(shù)據(jù)進(jìn)行分析,可以看出,在本次試驗(yàn)中,監(jiān)測系統(tǒng)在試驗(yàn)測量對象WP10C287-21型柴油機(jī)各個標(biāo)定工況下測量的實(shí)際功率與柴油機(jī)標(biāo)定功率較為接近。在常用工況下,即50%~90%標(biāo)定功率下的功率測量誤差率均在1%以內(nèi),可以較為精確地實(shí)現(xiàn)對漁船主機(jī)功率的在線監(jiān)測,符合預(yù)期目標(biāo)。相比通過研究典型主機(jī)改裝前后的標(biāo)定功率、轉(zhuǎn)速和規(guī)范對螺旋槳軸徑要求的最小值之間的關(guān)系來對現(xiàn)存漁船進(jìn)行判斷是否可能存在“大機(jī)小標(biāo)”現(xiàn)象[30],本研究所設(shè)計(jì)的漁船主機(jī)功率在線監(jiān)測系統(tǒng)可以更為直接地實(shí)現(xiàn)對漁船主機(jī)功率的在線實(shí)時監(jiān)測以及保存,解決目前較難回溯漁船主機(jī)功率最大值出現(xiàn)的時間點(diǎn)與位置的問題。
6 結(jié)論
本研究針對漁船主機(jī)“大機(jī)小標(biāo)”現(xiàn)象,對漁船主機(jī)功率監(jiān)測系統(tǒng)進(jìn)行研究,設(shè)計(jì)了一種新型漁船主機(jī)功率在線監(jiān)測系統(tǒng)。該系統(tǒng)基于磁電式轉(zhuǎn)速傳感器、應(yīng)變式扭矩傳感器、無線遙測系統(tǒng),以及LabView虛擬儀器對漁船主機(jī)進(jìn)行功率監(jiān)測,可以實(shí)現(xiàn)主機(jī)功率的實(shí)時監(jiān)測、記錄和回放。試驗(yàn)表明:本監(jiān)測系統(tǒng)在試驗(yàn)測量對象WP10C287-21型柴油機(jī)常用工況下,即50%~90%標(biāo)定功率下的功率測量誤差率均在1%以內(nèi),可以較為精確地實(shí)現(xiàn)對漁船主機(jī)功率的在線監(jiān)測,符合預(yù)期目標(biāo)。
□
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中學(xué)生數(shù)理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學(xué)生數(shù)理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中國生殖健康(2019年3期)2019-02-01 06:12:26
中學(xué)生數(shù)理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學(xué)小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
少兒科學(xué)周刊·兒童版(2016年1期)2016-03-14 03:52:21
鑿巖機(jī)械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學(xué)學(xué)報(2015年3期)2015-11-11 17:20:00
