負(fù)荷觀測器的軋機(jī)單輥傳動(dòng)系統(tǒng)負(fù)荷平衡控制
2021-08-26 10:52:46張瑞成
機(jī)械設(shè)計(jì)與制造 2021年8期
關(guān)鍵詞:系統(tǒng)
張瑞成,趙 銘
(華北理工大學(xué)電氣工程學(xué)院,河北 唐山 063210)
1 引言
利用多臺(tái)電機(jī)串聯(lián)對軋機(jī)單輥傳動(dòng)是軋機(jī)傳動(dòng)系統(tǒng)經(jīng)常采用的方式,這種傳動(dòng)方式提高了電機(jī)的傳動(dòng)功率與傳動(dòng)效率。但是在鋼鐵軋制的實(shí)際過程中,由于傳動(dòng)系統(tǒng)上下電機(jī)的實(shí)際參數(shù)不完全一致、帶鋼與軋輥之間出現(xiàn)相對滑動(dòng)等問題,導(dǎo)致上下軋輥的線速度很難保持一致,這將嚴(yán)重影響帶鋼的質(zhì)量與設(shè)備的安全運(yùn)行。
為了使軋機(jī)單輥傳動(dòng)系統(tǒng)中的多臺(tái)電機(jī)具有良好的速度同步性能,學(xué)者們進(jìn)行了深入的研究。文獻(xiàn)[1]采用交叉耦合結(jié)構(gòu),將兩個(gè)電機(jī)轉(zhuǎn)速作為控制器的輸入,通過轉(zhuǎn)速補(bǔ)償對電機(jī)轉(zhuǎn)速進(jìn)行調(diào)節(jié),實(shí)現(xiàn)了兩個(gè)電機(jī)之間的同步控制;文獻(xiàn)[2]引入主從同步控制結(jié)構(gòu),電樞電流作為控制器的輸入量,實(shí)現(xiàn)了立輥軋機(jī)交流異步電機(jī)的速度同步和轉(zhuǎn)矩同步;文獻(xiàn)[3]采用交叉耦合同步控制結(jié)構(gòu)與PI控制器組成同步控制系統(tǒng),實(shí)現(xiàn)了上、下輥負(fù)荷的平衡調(diào)節(jié)。
以上文獻(xiàn)雖然實(shí)現(xiàn)了軋機(jī)電機(jī)的速度同步,但是將電機(jī)轉(zhuǎn)速或電樞電流作為負(fù)荷平衡控制器的輸入量,存在很多缺陷,譬如:由于軋制過程是動(dòng)態(tài)的,而且輸入量精度不夠高,容易產(chǎn)生比較大的誤差;在鋼鐵軋制時(shí),軋輥的實(shí)際負(fù)載量是不斷變化的,造成電機(jī)較大的速度波動(dòng),進(jìn)而導(dǎo)致電機(jī)的負(fù)荷平衡調(diào)節(jié)效果不佳。
針對上述問題,設(shè)計(jì)一種新型負(fù)荷平衡控制器來保證上下電機(jī)輸出力矩[4]相等:第一,用負(fù)荷觀測器觀測出來的負(fù)載力矩[5-6]作為負(fù)荷平衡控制器的輸入量;第二,將單神經(jīng)元自適應(yīng)PID神經(jīng)網(wǎng)絡(luò)[7-8]作為負(fù)荷平衡控制器的控制策略。負(fù)荷平衡控制器的輸出通過交叉耦合結(jié)構(gòu)加載到各電機(jī)子系統(tǒng)中,同時(shí)在系統(tǒng)中給電機(jī)加入一個(gè)前饋補(bǔ)償環(huán)節(jié),提高了電機(jī)的穩(wěn)定性及動(dòng)態(tài)性能,同時(shí)也改善了系統(tǒng)的同步控制性能。通過仿真實(shí)驗(yàn)驗(yàn)證該調(diào)速系統(tǒng)改善同步效果的有效性。
2 軋機(jī)單輥傳動(dòng)系統(tǒng)機(jī)電模型
以上輥直流拖動(dòng)電機(jī)通過連接軸連接軋輥為例,將連接軸看作剛性連接,建立軋機(jī)單輥傳動(dòng)系統(tǒng)機(jī)電模型,微分方程表達(dá)式如下:
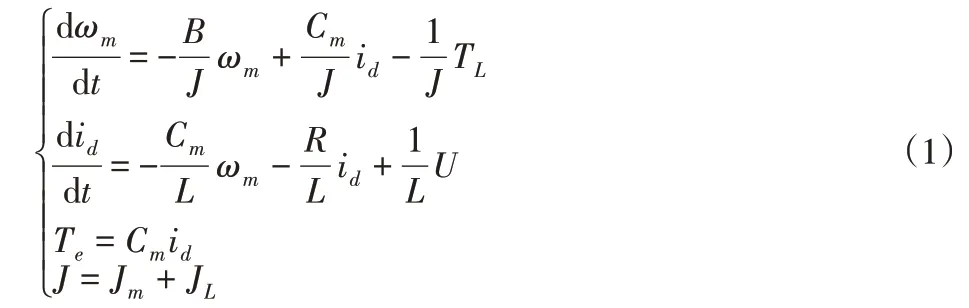
式中:id—電機(jī)的電樞電流;U—控制電機(jī)輸入電壓;ωm—電機(jī)的機(jī)械角速度;B—粘性摩擦系數(shù);Cm—電機(jī)的轉(zhuǎn)矩系數(shù);J—電機(jī)和負(fù)載折合到電機(jī)軸上的轉(zhuǎn)動(dòng)慣量;Jm—電機(jī)的轉(zhuǎn)動(dòng)慣量;J L—負(fù)載的轉(zhuǎn)動(dòng)慣量;R、L—電機(jī)電樞回路總電阻和總電感;T e、TL—電機(jī)的電磁轉(zhuǎn)矩和負(fù)載轉(zhuǎn)矩。對以上方程進(jìn)行拉普拉斯變換,求出相應(yīng)的傳遞函數(shù),并推導(dǎo)出的直流電機(jī)模型結(jié)構(gòu)圖,如圖1所示。

圖1 直流電機(jī)模型結(jié)構(gòu)圖Fig.1 DC Motor Model Structure Diagram
3 負(fù)荷平衡控制系統(tǒng)結(jié)構(gòu)
3.1 負(fù)荷平衡控制器原理
負(fù)荷平衡控制器可以解釋為控制上下工作輥在相同的時(shí)間內(nèi)輸出相同的轉(zhuǎn)矩。若輸出轉(zhuǎn)矩不相等,可以調(diào)節(jié)負(fù)荷平衡控制器,給軋輥電機(jī)一個(gè)外加速度,達(dá)到改變工作輥線速度的目的,這樣就實(shí)現(xiàn)了上下工作輥的負(fù)荷平衡。負(fù)荷平衡控制系統(tǒng)結(jié)構(gòu)圖,如圖2所示。

圖2 負(fù)荷平衡控制系統(tǒng)結(jié)構(gòu)圖Fig.2 Load Balance Control System Structure Diagram
為了達(dá)到穩(wěn)定的動(dòng)態(tài)性能和結(jié)構(gòu)上靈活性的目的,上下兩臺(tái)電機(jī)采用交叉耦合結(jié)構(gòu)來驅(qū)動(dòng)軋輥。把負(fù)荷觀測器所觀測到的上下軋輥的實(shí)際負(fù)載力矩值作為負(fù)荷平衡控制器的輸入?yún)?shù),當(dāng)觀測值的絕對值之差小于額定轉(zhuǎn)矩的3%時(shí),不進(jìn)行負(fù)荷平衡調(diào)節(jié);當(dāng)兩者之差大于3%時(shí),就要進(jìn)行附加轉(zhuǎn)速調(diào)節(jié)。將當(dāng)前給定的速度與負(fù)荷平衡控制器的輸出量作為附加速度的設(shè)定值,該設(shè)定值分別作為上下軋輥速度調(diào)節(jié)器的輸入量,實(shí)現(xiàn)了速度調(diào)節(jié)器相等的速度輸出,進(jìn)而滿足了上下軋輥的負(fù)荷平衡。
3.2 人工神經(jīng)網(wǎng)絡(luò)負(fù)荷平衡控制器設(shè)計(jì)
人工神經(jīng)網(wǎng)絡(luò)是一種多輸入單輸出的非線性單元,而且還具有自適應(yīng)和自學(xué)習(xí)能力[9-10],可以通過改變突觸權(quán)值來自學(xué)習(xí)并自適應(yīng)目標(biāo)對象的變化。神經(jīng)元有比例、積分、微分三個(gè)輸入維數(shù),它們的系數(shù)可以用三個(gè)連接權(quán)值來近似代替。采用單神經(jīng)元自適應(yīng)PID(Single Neuron Adaptive PID)神經(jīng)網(wǎng)絡(luò)可以達(dá)到良好的同步控制效果,單神經(jīng)元自適應(yīng)PID,如圖3所示。

圖3 單神經(jīng)元自適應(yīng)PID工作原理Fig.3 Single Neuron Adaptive PID Working Principle
神經(jīng)元輸入:

神經(jīng)元特性:

式中:Δu(k)—神經(jīng)元在k時(shí)刻輸出的增量;K u—神經(jīng)元的比例系數(shù);ωi(k)—神經(jīng)元在k時(shí)刻的權(quán)值;x i(k)—神經(jīng)元在k時(shí)刻對應(yīng)的輸入值;ηi—神經(jīng)元學(xué)習(xí)率。對應(yīng)的目標(biāo)函數(shù)為:

神經(jīng)元權(quán)值的調(diào)整用學(xué)習(xí)策略p i(k)來完成:

聯(lián)想式學(xué)習(xí)策略:

式中:z(k)—教師信號;x i(k)—當(dāng)前誤差信號。
該學(xué)習(xí)策略采用監(jiān)督學(xué)習(xí),即作用于神經(jīng)元的教師信號z(k)可以控制環(huán)境信息。
目標(biāo)函數(shù)的偏導(dǎo)數(shù)按如下方式推導(dǎo):

學(xué)習(xí)算法為:

通常情況下,神經(jīng)元學(xué)習(xí)率ηi的取值要適中,如果太大,容易造成神經(jīng)元調(diào)節(jié)器超調(diào);如果太小,會(huì)增加神經(jīng)元調(diào)節(jié)器的調(diào)節(jié)時(shí)間,K u的非線性變換修正方法如下[8]。

式中:K u0—神經(jīng)元比例系數(shù)穩(wěn)態(tài)初值;ε—調(diào)整系數(shù),一般為K u0的1∕10。
系統(tǒng)的穩(wěn)定性、準(zhǔn)確性與快速性取決于K u的大小。減小K u的值,系統(tǒng)的響應(yīng)時(shí)間變長,超調(diào)量減小,但是如果K u減小的太多,響應(yīng)時(shí)間會(huì)變得過長;若增大K u的值,系統(tǒng)響應(yīng)時(shí)間會(huì)變短,超調(diào)量增大,但是K u值過大,會(huì)引起響應(yīng)的震蕩。所以要根據(jù)系統(tǒng)的要求選取一個(gè)合適的K u值,保證系統(tǒng)有著更好的穩(wěn)態(tài)性能和更小的超調(diào)量。
4觀測器設(shè)計(jì)
軋機(jī)主傳動(dòng)系統(tǒng)要求高精度和高動(dòng)態(tài)性能,降低動(dòng)態(tài)速降、縮短恢復(fù)時(shí)間成為了亟待解決的問題,引入負(fù)荷觀測器不僅能夠解決這一問題,還可以改善系統(tǒng)輸出速度的控制精度。
由式(1)可得電機(jī)負(fù)載與電機(jī)轉(zhuǎn)速和電樞電流有關(guān),可以利用檢測到的電樞電流與電機(jī)轉(zhuǎn)速來構(gòu)造一個(gè)負(fù)載力矩觀測器。在軋機(jī)軋制過程中出現(xiàn)負(fù)載擾動(dòng)的情況下,電機(jī)轉(zhuǎn)速、電流會(huì)出現(xiàn)相應(yīng)波動(dòng)[11],在控制系統(tǒng)中給電機(jī)加入前饋補(bǔ)償可以減弱這種影響,并且可以改善系統(tǒng)的動(dòng)態(tài)性能。軋機(jī)軋輥傳動(dòng)方式為:上下軋輥分別由單臺(tái)電動(dòng)機(jī)單獨(dú)驅(qū)動(dòng),其電機(jī)負(fù)荷觀測器原理圖,如圖4所示。

圖4負(fù)荷觀測器原理Fig.4 Load Observer Schematic
如圖4負(fù)荷觀測器原理,兩臺(tái)電機(jī)采用交叉耦合結(jié)構(gòu),每臺(tái)電機(jī)各設(shè)置一個(gè)負(fù)荷觀測器。將每臺(tái)電機(jī)的速度ω和電流id分別輸入傳遞函數(shù)G1(S)和G2(S)中,構(gòu)造出負(fù)荷觀測器,輸出觀測值經(jīng)過等效補(bǔ)償,加載到電機(jī)控制信號的輸入端。
據(jù)圖4可得電機(jī)轉(zhuǎn)速ω(s)和擾動(dòng)觀測值(s)的方程:


根據(jù)式(12)、式(13)可得觀測值(s)=M L(s)的條件為:


由式(16)、式(17)可得,負(fù)載力矩值可以間接地通過電樞電流與電機(jī)轉(zhuǎn)矩系數(shù)的乘積、轉(zhuǎn)動(dòng)慣量與轉(zhuǎn)速微分的乘積這兩個(gè)綜合量來得到。
根據(jù)不變性原理,電機(jī)加入前饋補(bǔ)償FN可以抵消或大大減小外部干擾,從而提高負(fù)荷平衡控制器的抗擾動(dòng)性能[12-13]。依據(jù)觀測器原理與軋機(jī)單輥傳動(dòng)系統(tǒng)機(jī)電模型可以推導(dǎo)出負(fù)荷觀測器控制系統(tǒng)結(jié)構(gòu)圖,如圖5所示。

圖5軋機(jī)單輥傳動(dòng)系統(tǒng)負(fù)荷觀測器控制系統(tǒng)傳遞函數(shù)框圖Fig.5 Transfer Function Block Diagram of Rolling Mill Single Roll Transmission System Load Observer Control System

為了提高系統(tǒng)的穩(wěn)定性,需要在FN中添加慣性環(huán)節(jié)。

為了達(dá)到更好的控制效果,令T q=T i,T i為電流調(diào)節(jié)器環(huán)節(jié)的等效時(shí)間常數(shù),可得補(bǔ)償器為:,那么加到電流調(diào)節(jié)器時(shí)沒有經(jīng)過微分環(huán)節(jié),這種設(shè)計(jì)方法實(shí)現(xiàn)起來方便并廣泛應(yīng)用于工業(yè)設(shè)計(jì)中。
5仿真實(shí)驗(yàn)
5.1實(shí)驗(yàn)參數(shù)
在軋機(jī)單輥傳動(dòng)剛性連接系統(tǒng)中,上下兩輥直流電機(jī)型號相同,但參數(shù)不完全一致。其中,拖動(dòng)電機(jī)參數(shù),如表1所示。

表1上、下拖動(dòng)電機(jī)參數(shù)Tab.1 The Parameters of the Drag Motor
兩臺(tái)直流電機(jī)的給定參考速度為ω*=23.7rad∕s。
根據(jù)單神經(jīng)元控制率可知,單神經(jīng)元自適應(yīng)PID可調(diào)參數(shù)有5個(gè)。學(xué)習(xí)率ηP、ηI、ηD,神經(jīng)元比例系數(shù)K u和神經(jīng)元權(quán)值ωi(k)。參數(shù)分別為,學(xué)習(xí)率
5.2 仿真結(jié)果及分析
文獻(xiàn)[3]采用交叉耦合同步控制結(jié)構(gòu)與PI控制器組成同步控制系統(tǒng),電機(jī)電樞電流作為負(fù)荷平衡控制器的輸入量,實(shí)現(xiàn)了上、下輥負(fù)荷平衡調(diào)節(jié),把該同步控制系統(tǒng)設(shè)為系統(tǒng)a。以系統(tǒng)a為基礎(chǔ),引入負(fù)荷觀測器,并帶有前饋補(bǔ)償環(huán)節(jié),設(shè)為系統(tǒng)b。用Matlab仿真工具分別對系統(tǒng)a、b進(jìn)行仿真實(shí)驗(yàn),驗(yàn)證其有效性,仿真結(jié)果,如圖6~圖9所示。

圖6 系統(tǒng)a、系統(tǒng)b上輥電機(jī)轉(zhuǎn)速對比圖Fig.6 Comparison of Roller Motor Speed on System a and System b

圖8 啟動(dòng)階段速度同步誤差對比圖Fig.8 Start-up Phase Speed Synchronization Error Comparison Chart

圖9 受軋制擾動(dòng)階段速度同步誤差對比圖Fig.9 Comparison of Speed Synchronization Error in Rolling Disturbance Stage
由圖6可知,在電機(jī)啟動(dòng)階段,系統(tǒng)a電機(jī)上升時(shí)間比較慢,到達(dá)穩(wěn)態(tài)的響應(yīng)時(shí)間為1.6s,而且動(dòng)態(tài)性能差,容易造成拖動(dòng)電機(jī)故障,傳動(dòng)軸損壞。在受到軋制負(fù)載擾動(dòng)后,產(chǎn)生明顯動(dòng)態(tài)速降,其中電機(jī)轉(zhuǎn)速達(dá)到23.65rad∕s,并且達(dá)到穩(wěn)態(tài)的速度較慢,響應(yīng)時(shí)間為6.2s,系統(tǒng)抗擾動(dòng)能力明顯不足。系統(tǒng)b與系統(tǒng)a相比,也產(chǎn)生了動(dòng)態(tài)下降的情況,但是加入了負(fù)荷觀測器對負(fù)荷進(jìn)行觀測并補(bǔ)償,在調(diào)節(jié)器的調(diào)節(jié)下可以較快地實(shí)現(xiàn)工作輥的負(fù)荷平衡,響應(yīng)時(shí)間縮短到1.175s;回到穩(wěn)態(tài)的實(shí)際響應(yīng)時(shí)間更短,響應(yīng)時(shí)間為5.178s,縮短了近16.5%。
由圖7~圖9可得,兩個(gè)系統(tǒng)均能使得上下輥電機(jī)速度達(dá)到同步,且同步精度較高。在(0~4)s期間,系統(tǒng)a的同步誤差達(dá)到0.0003rad∕s所需的時(shí)間為1.437s;4s受到軋制擾動(dòng)后,系統(tǒng)a的速度同步誤差的絕對值開始增大,同步性能開始變差,在(4~4.5)s內(nèi)速度同步誤差為-0.2423rad∕s。系統(tǒng)b引入負(fù)荷觀測器后,在(0~4)s期間,達(dá)到0.0003rad∕s所需的時(shí)間為1.46s,達(dá)到速度同步所需時(shí)間略長于系統(tǒng)a。受擾動(dòng)后同步誤差峰值為-0.0537rad∕s,系統(tǒng)b速度同步誤差峰值的絕對值較系統(tǒng)a減小了78%,同步性能明顯好于系統(tǒng)a沒有負(fù)荷觀測器的情況。由以上仿真實(shí)驗(yàn)結(jié)果知,軋制鋼材前,系統(tǒng)a與系統(tǒng)b的電機(jī)都有著良好的同步性能,扎制期間,負(fù)荷觀測器的引入增強(qiáng)了系統(tǒng)b的抗干擾能力,并且系統(tǒng)b較系統(tǒng)a有著更好的同步性能,能保證軋輥安全穩(wěn)定地運(yùn)行。

圖7 有無負(fù)荷觀測器速度同步誤差對比圖Fig.7 Comparison of Speed Synchronization Error of Load Observer
6 結(jié)論
(1)在軋機(jī)單輥傳動(dòng)同步控制系統(tǒng)中,針對軋機(jī)電機(jī)同步控制性能較差的問題,建立直流電機(jī)模型,并把軋輥的驅(qū)動(dòng)電機(jī)設(shè)計(jì)為交叉耦合結(jié)構(gòu),設(shè)計(jì)了單神經(jīng)元自適應(yīng)PID神經(jīng)網(wǎng)絡(luò)的負(fù)荷平衡控制器與負(fù)荷觀測器相結(jié)合的控制策略。
(2)通過對電機(jī)啟動(dòng)階段與軋制擾動(dòng)階段的仿真分析可得,引入負(fù)荷觀測器的電機(jī)同步控制系統(tǒng),在軋制前電機(jī)到達(dá)穩(wěn)態(tài)的響應(yīng)時(shí)間為1.175s,縮短了近26.5%。在軋制期間改善了上下輥電機(jī)的同步誤差和回到穩(wěn)態(tài)的響應(yīng)時(shí)間,電機(jī)回到穩(wěn)態(tài)的響應(yīng)時(shí)間為5.178s,縮短了近16.5%;同步誤差峰值的絕對值為0.0537rad∕s,較未引入負(fù)荷觀測器的同步控制系統(tǒng)減小了78%,保證了軋輥出力均衡。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機(jī)床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識(shí)經(jīng)濟(jì)·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32
