風洞捕獲軌跡機構設計與工作空間分析
2021-08-26 11:02:08謝志江姜安林
機械設計與制造 2021年8期
李 寧,謝志江,姜安林,賈 波
(重慶大學機械傳動國家重點實驗室,重慶400044)
1 引言
飛機在發射或投放導彈、炸彈、副油箱等外掛物時,為避免這些外掛物與飛機發生碰掛,必須對從飛機發射或投放后的外掛物的運動軌跡進行模擬測量。而模擬測量需要一套放在風洞中的六自由度機構實驗設備。此種機構的設計除了滿足足夠的強度和剛度等,還需要滿足足夠的工作空間,易于安裝維護和控制的要求。
目前在國內,文獻[1]中設計了一種六自由度機構,此機構的X向和Z向都是通過機構的二級旋轉運動產生的投影位移實現,因此這兩個運動存在相互耦合關系,不利于單獨運動控制,同時也限制了這兩個方向的工作行程。文獻[2]中機構在X,Y,Z三個移動方向完全解耦,運動控制更加方便;但是此機構在配重X向機構時,Y向機構增加了配重的重量,同時X向的與Y向的運動范圍較小;在Y向外掛物的力比X向與Z向的力大,因此要盡可以減小Y向機構的受力面積,以增加機構的剛度,而此機構的Y向受力面積較大,減小了機構的剛度。文獻[3]中機構需要從上往下吊裝安裝,起吊高度高,同時Z向機構是嵌套的形式,不利于機構的安裝與維護。文獻[4]中對機構局部俯仰偏航機構進行了運動學分析,并未對機構整體運動學進行分析。文獻[5]中利用幾何法和數值法計算了7R機械臂的工作空間,但是對于多自由度的機械臂幾何法求解復雜。文獻[6]中利用SimMechanics仿真法計算了串聯三自由機構的工作空間。文獻[7]中提出了D-H法在建立坐標系時存在的問題,提出了一種CFDH法完善了機器人的運動學建模。
綜合以上分析,主要解決舊機構不能滿足現在行程要求,重新設計了一種新的機構,分析其機構的強度和剛度。同時對于D-H法運用本機構建模的不便,運用基本坐標變換和DH法聯合法,建立了六自由度機構的運動學正解模型,并運用蒙特卡洛法和SimMechanics對比來驗證運動學模型和工作空間是否正確。
2 六自由度機構結構設計
2.1 整體機構
該機構由三個移動關節和三個轉動關節組成,分別實現X Y Z的移動和繞三個軸俯仰,偏航和滾轉的六個自由度運動,用來模擬導彈等外掛物從飛機分離時的運動。如圖1所示。三個移動關節都是由電機帶動絲杠螺母實現。偏航和俯仰機構是則是利用曲柄滑塊的原理實現,滾轉則是由中空電機加減速器直接輸出為轉動。在此機構中,設計了兩種X向基座形式:第一種采用X向基座側掛在Z向立柱上,俯視圖,如圖2所示。第二種采用X向基座對稱包絡Z向立柱,俯視圖,如圖3所示。在相同厚度Z向立板情況下,第一種方式和第二種方式的橫截面機分別為0.23276m2和0.3542m2,不用對稱機構對X向基座在Y O Z平面的橫截面積上可以減小34.2%,有效減小氣流對機構沖擊。同時第二種方式在安裝X向導軌時需要保證兩側的導軌在同一平面,這增加了裝配時的精度。同時因為第一種方案中X向基座是懸臂的形式,對Z向立柱的力增加,但是相對于X向橫梁的截面積減小了34.2%,有效減小了空氣對X向橫梁的阻力。因此第一種方式更加合理。
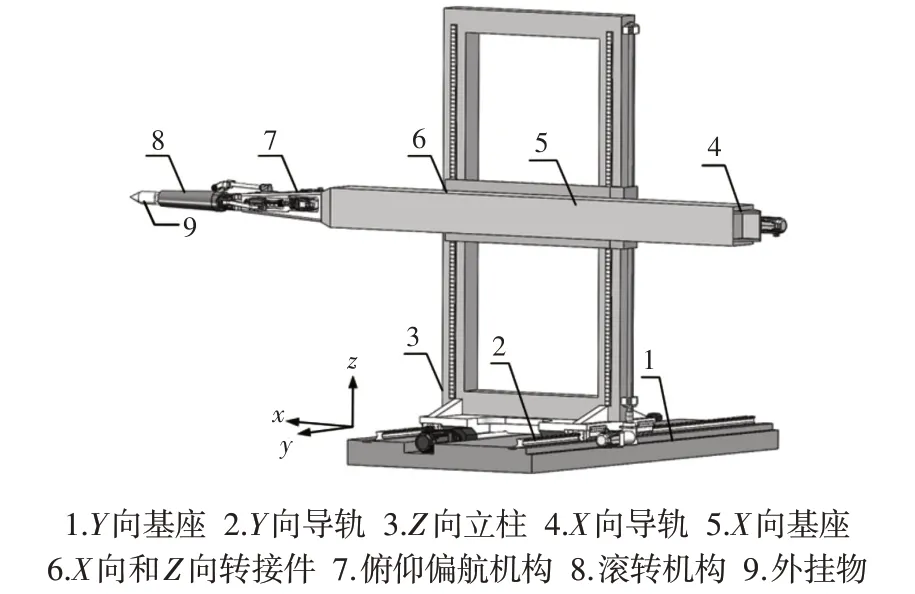
圖1 六自由度機構軸側三維模型Fig.1 3D Model of the Six-Degree-of-Freedom Mechanism Axis Side
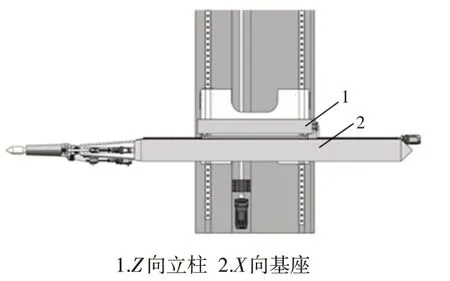
圖2 X向基座側掛俯視圖Fig.2 X-Side Base Side View
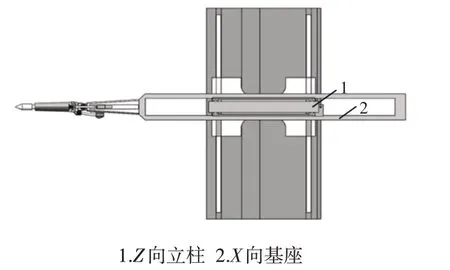
圖3 對稱X向基座俯視圖Fig.3 Symmetrical X-Direction Base Top View
2.2 俯仰偏航單元結構設計
俯仰偏航機構前面連接滾轉機構,在連接到外掛物上,帶動外掛物實現俯仰和偏航運動。俯仰偏航都是可以等效為曲柄滑塊機構,兩個自由度的旋轉中心軸線互相垂直且不相交;同時為了空間復用,兩個驅動布置成并聯機構,俯仰偏航分別可以實現±45°的范圍,如圖4所示。
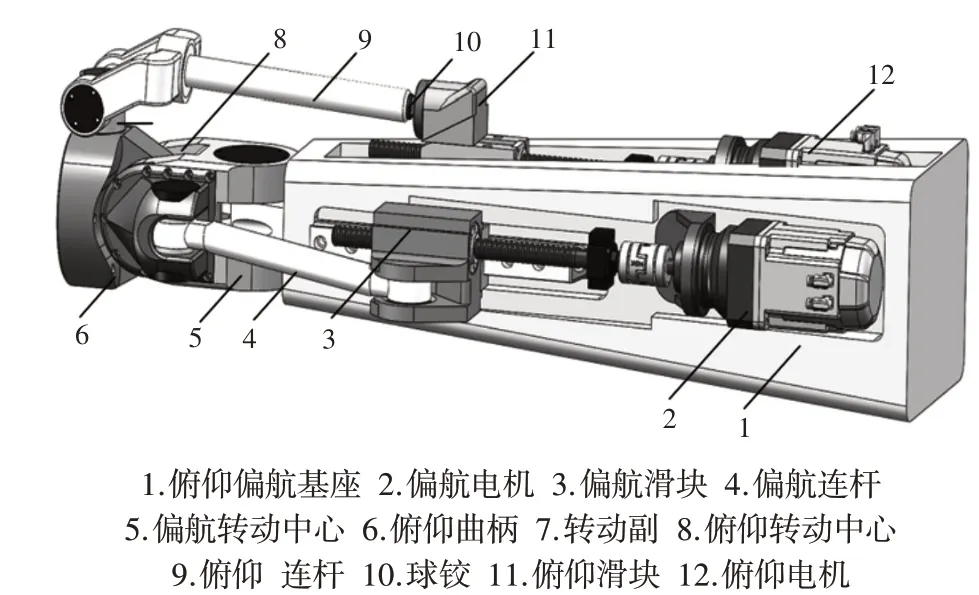
圖4 俯仰偏航機構三維模型Fig.4 3D Model of Pitch Yaw Mechanism
2.3 X向和Z向單元結構設計
為實現機構的X向和Z向機構的直線運動形式,由絲杠螺母把電機轉動變為螺母的移動,兩個方向的滑塊布置為相互垂直的方式。如圖5所示。
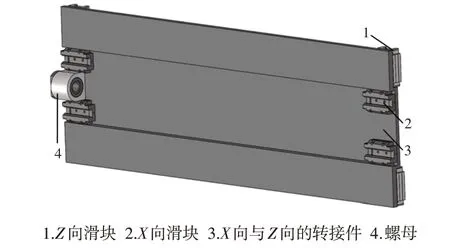
圖5 X向與Z向結構三維模型Fig.5 3D Model of X-Direction and Z-Direction Structure
3 建立工作空間運動模型
由于連桿(1~4)為移動副,連桿(5~7)為轉動副,連桿(1~4)如果運用D-H較為繁瑣,坐標建立需滿足D-H法中平移變換,使得建立起來非常不便。由于D-H法所有運動都是關于X軸和Z軸的,而無法表示關于Y軸的運動[7-9]關于對于這種移動副直接應用基本坐標變換比D-H更為簡單,所以表1只有連桿(5~7)運用D-H法。關節參數由連桿長度ai-1,連桿的間距di,連桿的轉角θi,連桿的轉角αi-1四個參數表示。
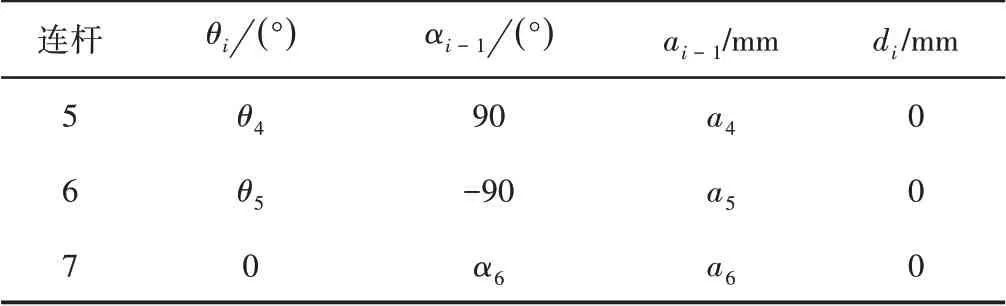
表1 六自由度機構連桿變換參數Tab.1 6-Degree-of-Freedom Mechanism Linkage Transformation Parameters
根據所建立的坐標系,如圖6所示。運用D-H法連桿變換公式(1)與基本坐標變換式(2),式(2)中A1表示沿著y軸移動d1的矩陣,A2表示沿著z軸移動d12的矩陣,A3表示沿著z軸移動d12的矩陣,A4表示沿著x軸移動d3的矩陣。A5,A6,A7代入式(1)。
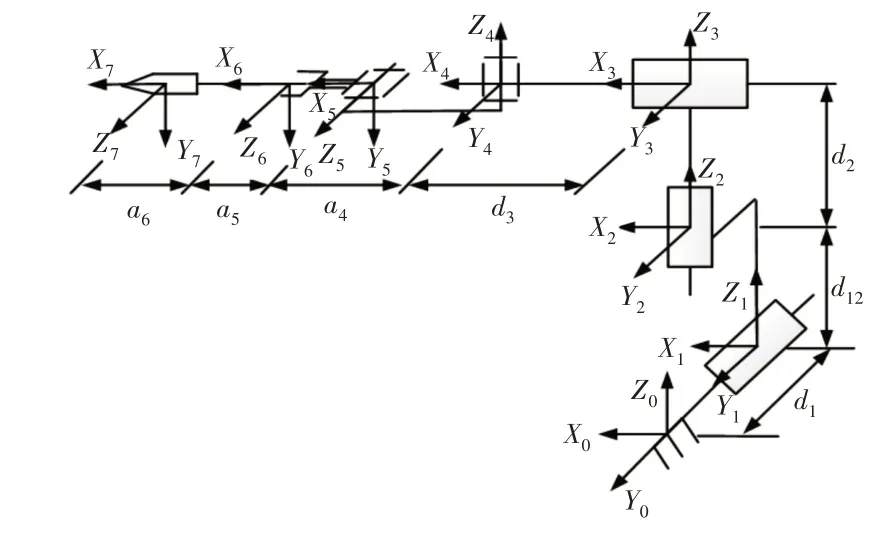
圖6 關節坐標系Fig.6 Joint Coordinate System

4 工作空間的求解
4.1 應用蒙特卡洛法求解工作空間
蒙特卡洛法是由隨機理論的發展而來的用于求解多關節機械臂工作空間[10],這種方法的關鍵在于隨機數是在機構的各個關節變化范圍內取值的,再把這些隨機數當作函數的自變量,依次得出函數值的點集在顯示出工作空間。由于本機構有多個自由度,幾何法和解析法在求解此機構會比較繁瑣,而用蒙特卡洛法的過程中要先算出機構末端的位置坐標,這不僅可以為下一步計算運動學的正解和逆解提供方便,同時可以在此基礎上運用蒙特卡洛法算出工作空間。采用蒙特卡洛法求解本機構工作空間的步驟如下:
首先計算出機構運動學的正解方程,從方程中得出末端坐標系相對于參考坐標系的位置坐標。由于只要末端的位置坐標,因此可以不考慮末端姿態坐標。位置坐標表達式如上式(4)-式(6)。確定三個移動關節和三個轉動關節的取值范圍,利用Mat?lab中rand()函數產生N個(0~1)的隨機點。代入如下公式產生各關節的隨機變量。

將產生的各個關節的隨機變量代入機構末端的位置坐標p x,p y,p z的表達式中計算空間坐標點。設定循環次數,將坐標點云圖輸出到圖形設備,分析其工作空間。循環次數即是產生隨機點的數量。利用Matlab將上述步驟程序化,取循環次數為20000。即可得到六自由度機構末端的工作空間云圖。工作空間三維圖和各截面圖,如圖7~圖10所示。
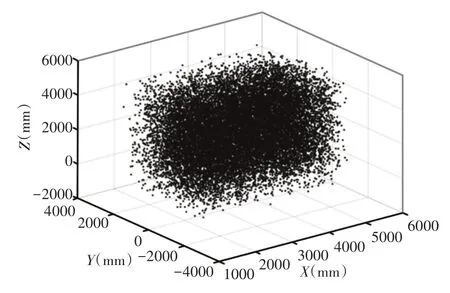
圖7 工作空間云圖Fig.7 Workspace Cloud
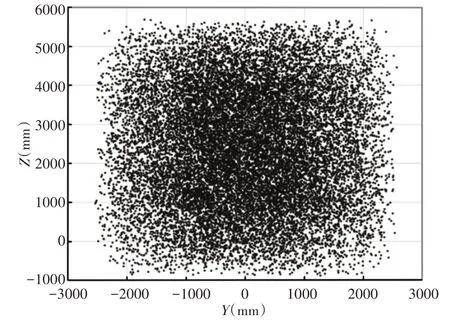
圖10 YOZ截面圖Fig.10 YO Z Cross-Section
由仿真圖形結果可以看出,這里的六自由度機構的工作空間近似為一個長方體,相對于坐標0,機構末端X向運動范圍(+1400~+5400)mm,Y向空間范圍(-2600~+2600)mm,Z向運動范圍(-1000~+5400)mm。

圖8 X O Y截面圖Fig.8 XOY Cross-Section
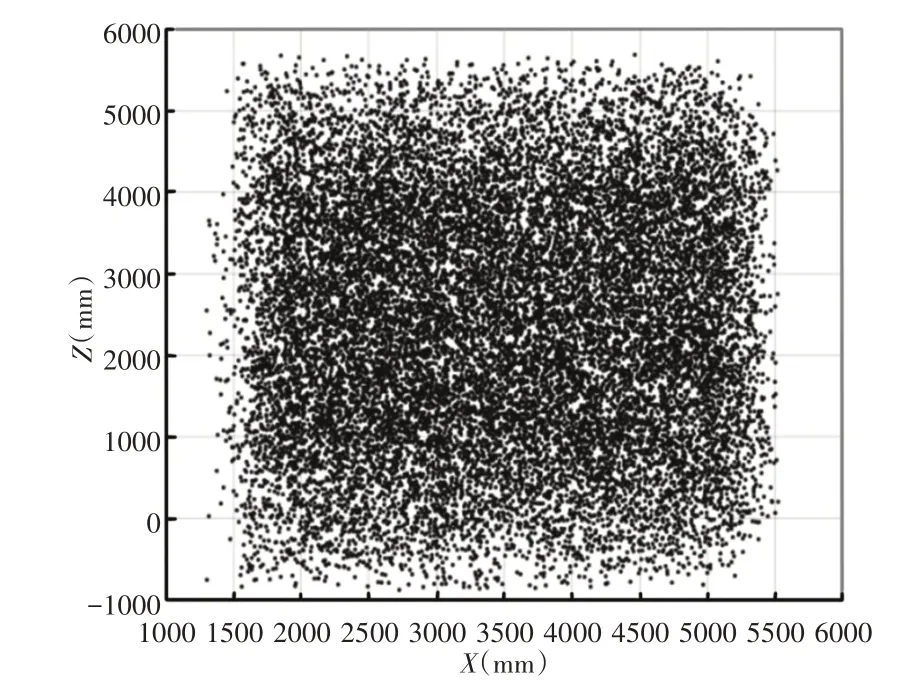
圖9 X O Z截面圖Fig.9 XOZ Cross-Section
4.2 應用SimMechanics求解工作空間
利用simulink中的SimMechanics工具箱,根據機構的運動模型,建立機構仿真模型,如圖11所示。主要選取一個接地模塊,3個移動副,2個轉動副,5個剛體模塊,5個驅動模塊和一個傳感器模塊。由于本機構中的滾轉對工作空間沒有影響,因此沒有必要建立滾轉的模塊。根據各個關節的移動范圍和轉動范圍設置各個模塊的驅動。利用傳感器跟蹤的機構末端的位置,并把數據輸出到主界面的workspace中。再利用這些數據運用plot函數繪制出工作空間的圖,如圖12~圖15所示。
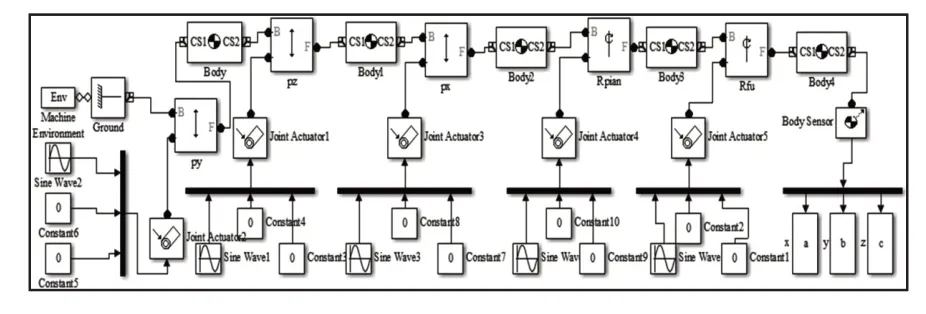
圖11 整體機構運動仿真模型Fig.11 Overall Mechanism Motion Simulation Model
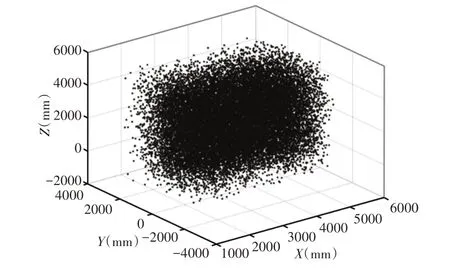
圖12 工作空間云圖Fig.12 Workspace Cloud Map
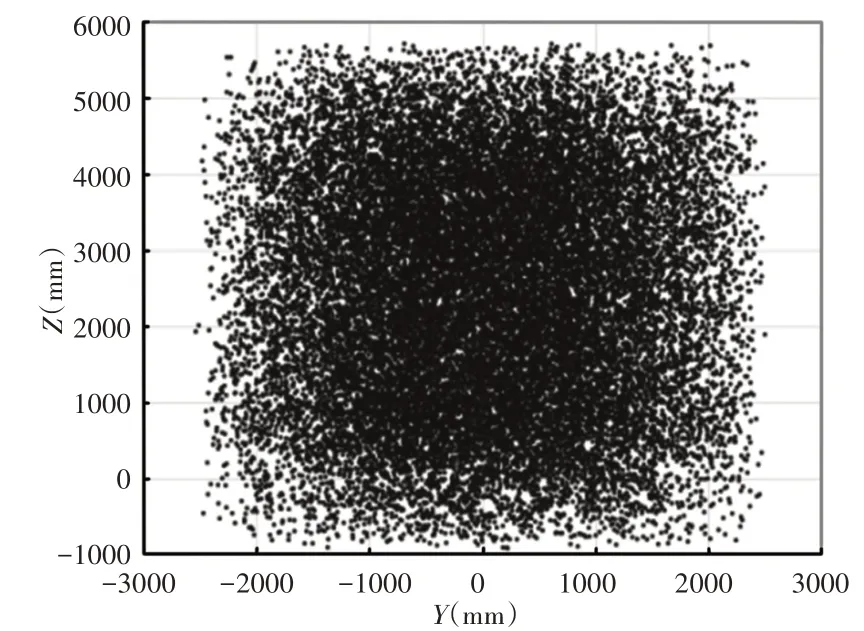
圖15 Y OZ截面圖Fig.15 YO Z Sectional View
對比蒙特卡洛法與SimMechanics方法,兩種方法的得出的結果近似相同,說明該模型的運動方程建立的正確性;同時運動相比于文獻[2]中的X向運動范圍為(+0~+1000)mm,Y向運動范圍為(-400~+400)mm,Z向運動范圍為(-450~+450)mm,如表2所示。變為X向運動范圍(+0~+4000)mm,Y向空間范圍(-1600~+1600)mm,Z向運動范圍為(-2200~+2200)mm。X向與Y向行程提高4倍,Z向行程提高4.8倍,運動工作空間得到有效提高。
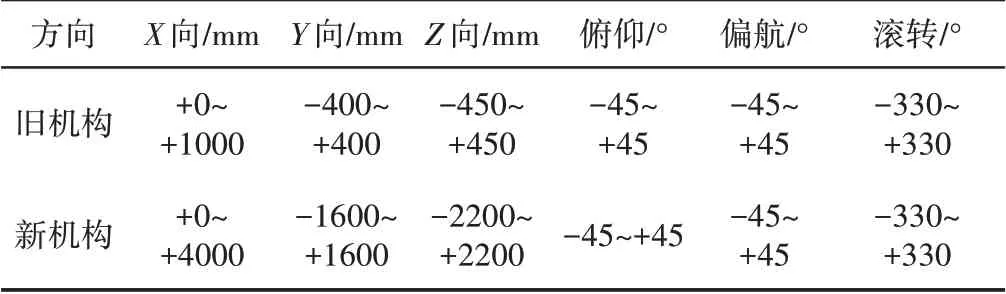
表2 新舊機構的運動副的運動范圍對比Tab.2 Comparison of the Range of Sports of the Sports Department of the Old and New Institutions
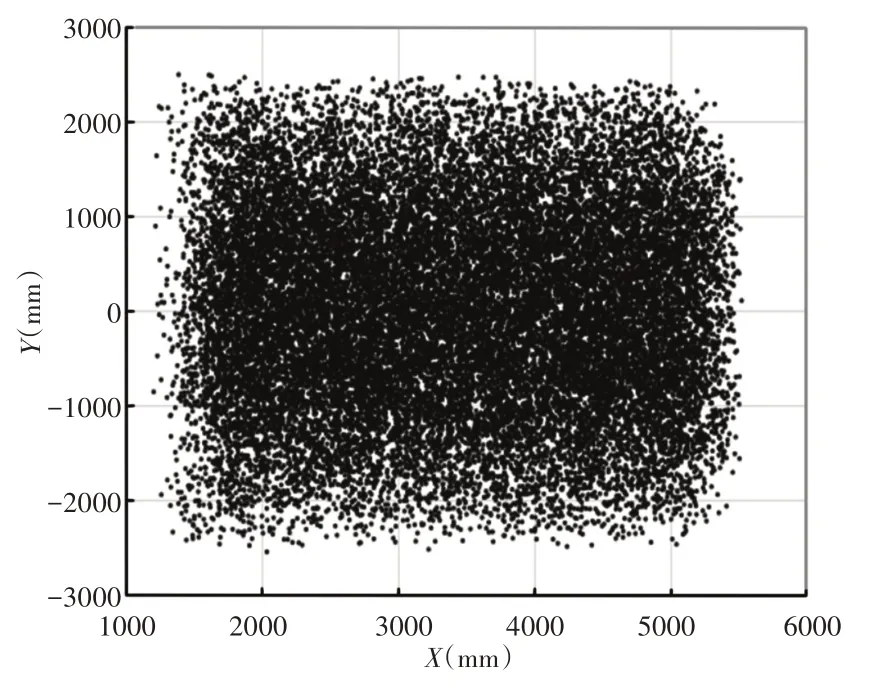
圖13 X O Y截面圖Fig.13 XOY Cross-Section
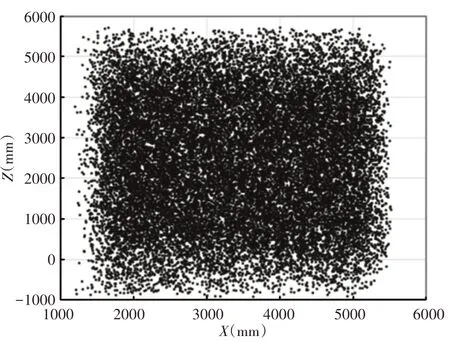
圖14 X O Z截面圖Fig.14 XOZ Cross-Section
5 有限元仿真分析
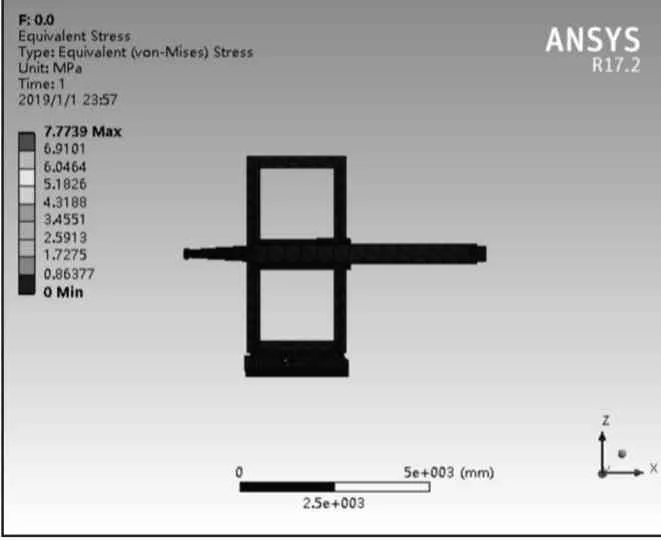
在滿足一定工作空間的條件下,為保證不同姿態下機構的強度和剛度,需要對機構進行有限元分析。首先為保證網格的劃分,需要對外購件進行等尺寸的簡化,調整到不同位姿,再將solidwork中三維模型導入ANSYS軟件中。其中定義模型的材料為Q235,彈性模量為2×1011N∕m2.泊松比0.3,密度7850kg∕kg∕m3,屈服極限235MPa。機構的典型工況如表3,例如工況1中最大應力和最大變形,如圖16、圖17所示。不同工況下機構關鍵零件的最大變形和最大應力,如表4、表5所示。
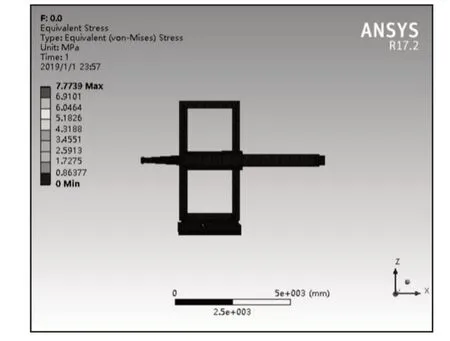
圖16 工況1中的最大應力云圖Fig.16 Maximum Stress Coud in Case 1
?
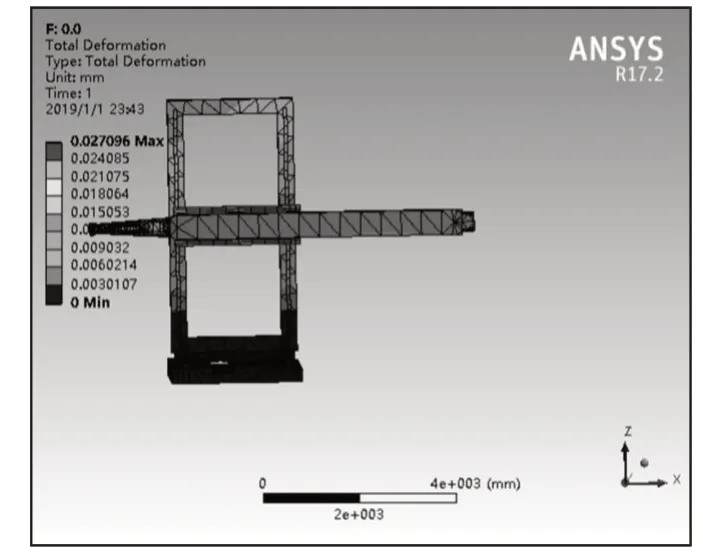
圖17 工況1中的最大變形云圖Fig.17 Maximum Deformation Cloud in Case1
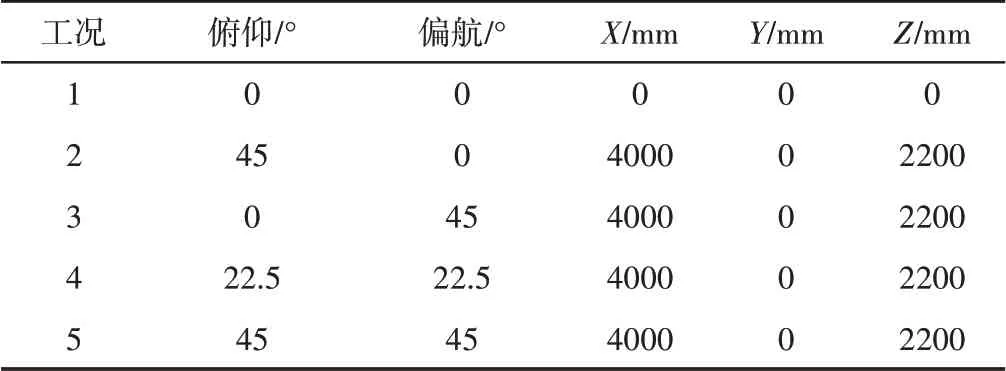
表3 典型工況下機構的狀態表Tab.3 State table of the mechanism under typical working conditions
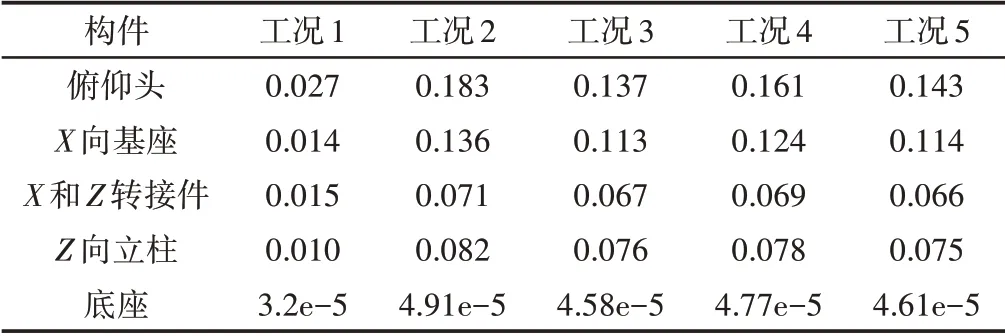
表4 各構件在不同工況下的最大變形表(mm)Tab.4 Maximum Deformation Table of Each Component under Different Working Conditions(mm)
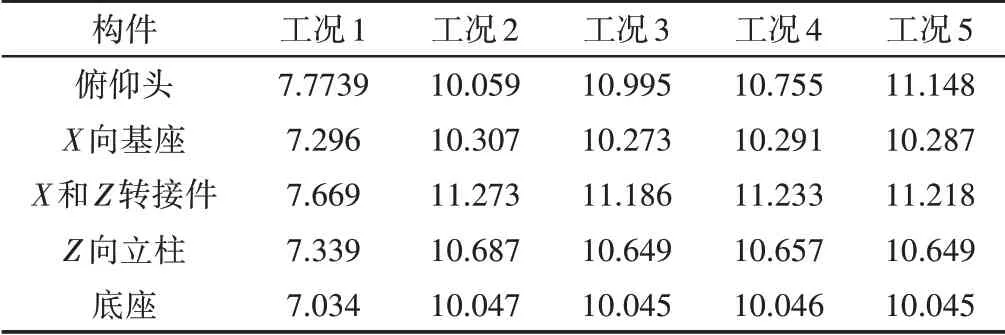
表5 各構件在不同工況下的最大應力表(MPa)Tab.5 Maximum Stress Table of Each Component under Different Working Conditions(MPa)
由表4可知,俯仰頭在工況2下變形最大為0.183mm;同時表4可知在同一工況下俯仰頭的變形最大,底座的變形最小。在表5中在工況2時X和Z向轉接件的應力最大為11.273MPa,小于材料的屈服極限235MPa。因此結構的靜剛度和強度都能滿足。
6 結論
提出了一種新型六自由度機構,并具體設計俯仰、偏航、X向、Y向、Z向各個部分的結構形式,同時對比分析了X向基座方案一和方案二兩種方案,得出方案一更優。采用蒙特卡洛法與SimMechanics仿真法作對比,驗證了該機構的運動學正解方法與工作空間的正確性,同時結果表明X向和Y行程提高4倍,Z向行程提高4.8倍,提高了六自由度的工作空間。應用有限元法對機構的關鍵部件在不同工況下進行了強度和剛度分析,結果表明在工況2時,最大應力為11.273MPa,最大變形0.183mm,該結構強度和剛度設計合理。
