人機(jī)協(xié)同控制的車道保持輔助系統(tǒng)安全性能研究
2021-08-26 06:19:50劉春陽王張飛張毅暉
中國機(jī)械工程 2021年16期
隋 新 劉春陽 詹 坤 王張飛 張毅暉
1.河南科技大學(xué)機(jī)電工程學(xué)院,洛陽,471003 2.機(jī)械裝備先進(jìn)制造河南省協(xié)同創(chuàng)新中心,洛陽,471003 3.河南省機(jī)械設(shè)計及傳動系統(tǒng)重點(diǎn)實(shí)驗(yàn)室,洛陽,471003
0 引言
車道保持輔助(lane keeping assist,LKA)系統(tǒng)是一種高級駕駛輔助系統(tǒng),主要用于防止駕駛員因分心、疲勞駕駛導(dǎo)致車輛偏離出車道線[1]。近年來,隨著車道偏離預(yù)警技術(shù)的逐漸成熟,國內(nèi)外越來越多的研究者聚焦于車道保持輔助系統(tǒng)研究,取得了豐富的成果,例如PID算法[2]、人工勢場法[3]、模型預(yù)測控制算法[4]等。文獻(xiàn)[5-7]建立了駕駛員模型、預(yù)瞄模型以及改進(jìn)模型,通過建立車輛運(yùn)動學(xué)和動力學(xué)模型,對車道保持控制算法進(jìn)行研究,在控制性能上獲得較好效果,但人機(jī)協(xié)同控制策略問題考慮較少。文獻(xiàn)[8]從客車車道保持輔助系統(tǒng)實(shí)現(xiàn)的角度闡述了兩種改進(jìn)的模型預(yù)測控制算法,并從可行性和成本效益方面對兩種方法進(jìn)行定性對比,評述其優(yōu)缺點(diǎn)。文獻(xiàn)[9-11]充分考慮駕駛員特性,在橫向控制算法基礎(chǔ)上,建立遠(yuǎn)近視角駕駛員模型和車道偏離決策模型等,有效增強(qiáng)了人機(jī)合作程度,而對控制系統(tǒng)的激活/退出安全策略研究較少,難以保證駕駛員的絕對控制權(quán)。文獻(xiàn)[12]將系統(tǒng)感知與魯棒控制相結(jié)合,使駕駛員與LKA系統(tǒng)能夠成功地共享控制權(quán),提高了駕駛員與汽車之間的自動化理解,減少或避免了沖突,作者提到其LKA系統(tǒng)沒有考慮車速變化,共享控制的魯棒性還有待提高。文獻(xiàn)[13]提出一種新車道保持輔助系統(tǒng)的共享控制方案,通過調(diào)整位移間隔來實(shí)現(xiàn)共享控制,并仿真了兩種典型的工況。文獻(xiàn)[14]基于電子助力轉(zhuǎn)向器設(shè)計了一種車道保持輔助系統(tǒng),并綜合考慮車道線置信度、跨道時間、駕駛員狀態(tài)等信息,提出一種車道保持輔助系統(tǒng)介入和退出策略,該策略有效提高了系統(tǒng)的安全性和舒適性,但文中模型參數(shù)較多,系統(tǒng)結(jié)構(gòu)較復(fù)雜,調(diào)試?yán)щy。
針對以上問題,本文綜合考慮人-車-路信息,設(shè)計了一種基于人機(jī)協(xié)同控制的車道保持輔助系統(tǒng)。采用最優(yōu)線性二次型調(diào)節(jié)器(linear quadratic regulator,LQR)和PID控制算法,可以得到車道保持助力扭矩;通過橫向距離誤差、質(zhì)心側(cè)偏角誤差和車速等判斷車輛偏離狀態(tài),并聯(lián)合助力扭矩和駕駛員實(shí)際扭矩實(shí)現(xiàn)車道保持人機(jī)協(xié)同控制;基于駕駛員實(shí)際扭矩、轉(zhuǎn)向燈信號、車輪越線距離和車道線置信度等,提出一種安全退出策略,提高了人機(jī)共駕的安全性。
1 車輛動力學(xué)建模分析
車輛偏離車道線的運(yùn)動主要是橫向運(yùn)動,故本文忽略車輛縱向動力學(xué)特性,重點(diǎn)考慮車輛橫向動力學(xué)特性。如圖1所示,建立簡化的二自由度車輛動力學(xué)模型[15],分析車輛輪胎及相關(guān)部件的受力情況。車輛動力學(xué)方程中各參數(shù)及其含義見表1。
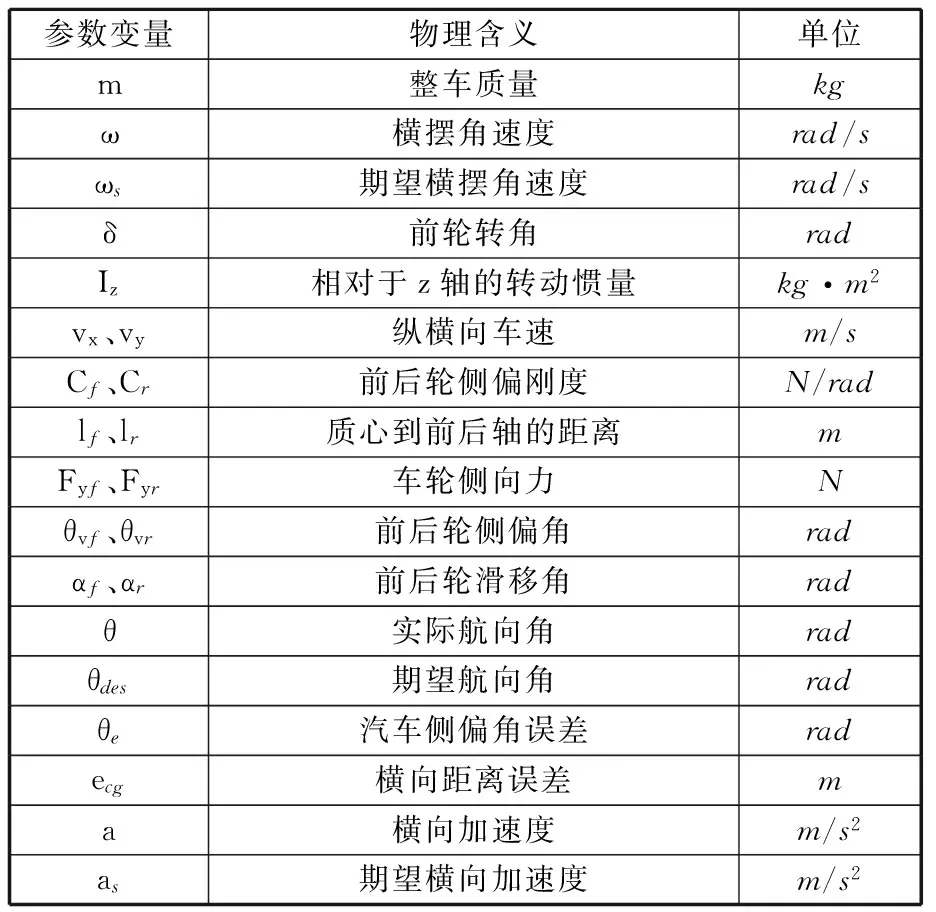
表1 整車模型參數(shù)及含義
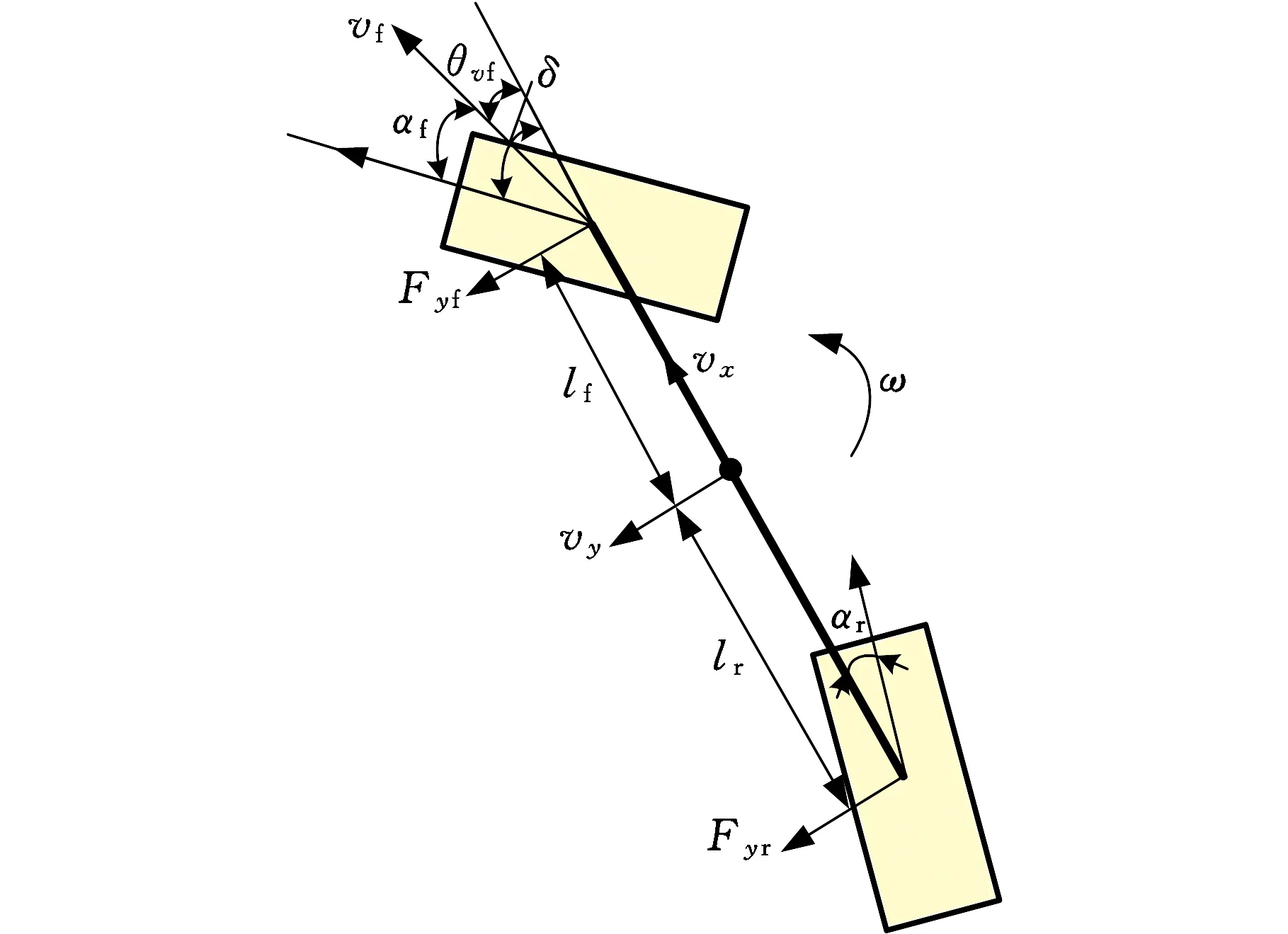
圖1 二自由度汽車動力學(xué)模型
為減小模型的計算量,作如下假設(shè):①忽略車輛懸架對控制系統(tǒng)的影響;②車輛行駛道路平坦,路況良好;③輪胎符合線性模型,忽略輪胎力的縱橫向耦合關(guān)系;④忽略橫縱向空氣動力學(xué)[16]。
根據(jù)上述條件,沿著y軸和繞z軸的動力學(xué)方程為
(1)
根據(jù)小角度假設(shè)定理,可得到汽車前后輪側(cè)偏角θvf、θvr:
(2)
汽車前后輪滑移角αf、αr為
(3)
則汽車前后輪受到的側(cè)向力Fyf、Fyr為
(4)
將式(2)~式(4)代入式(1)中,可得到狀態(tài)方程:
(5)
由車輛動力學(xué)模型分析可知,汽車橫向控制問題主要是通過控制輪胎前輪轉(zhuǎn)角來實(shí)現(xiàn)的。如圖2所示,建立汽車質(zhì)心處橫向誤差與期望軌跡模型,清晰描述車輛與車道線之間的動態(tài)關(guān)系。
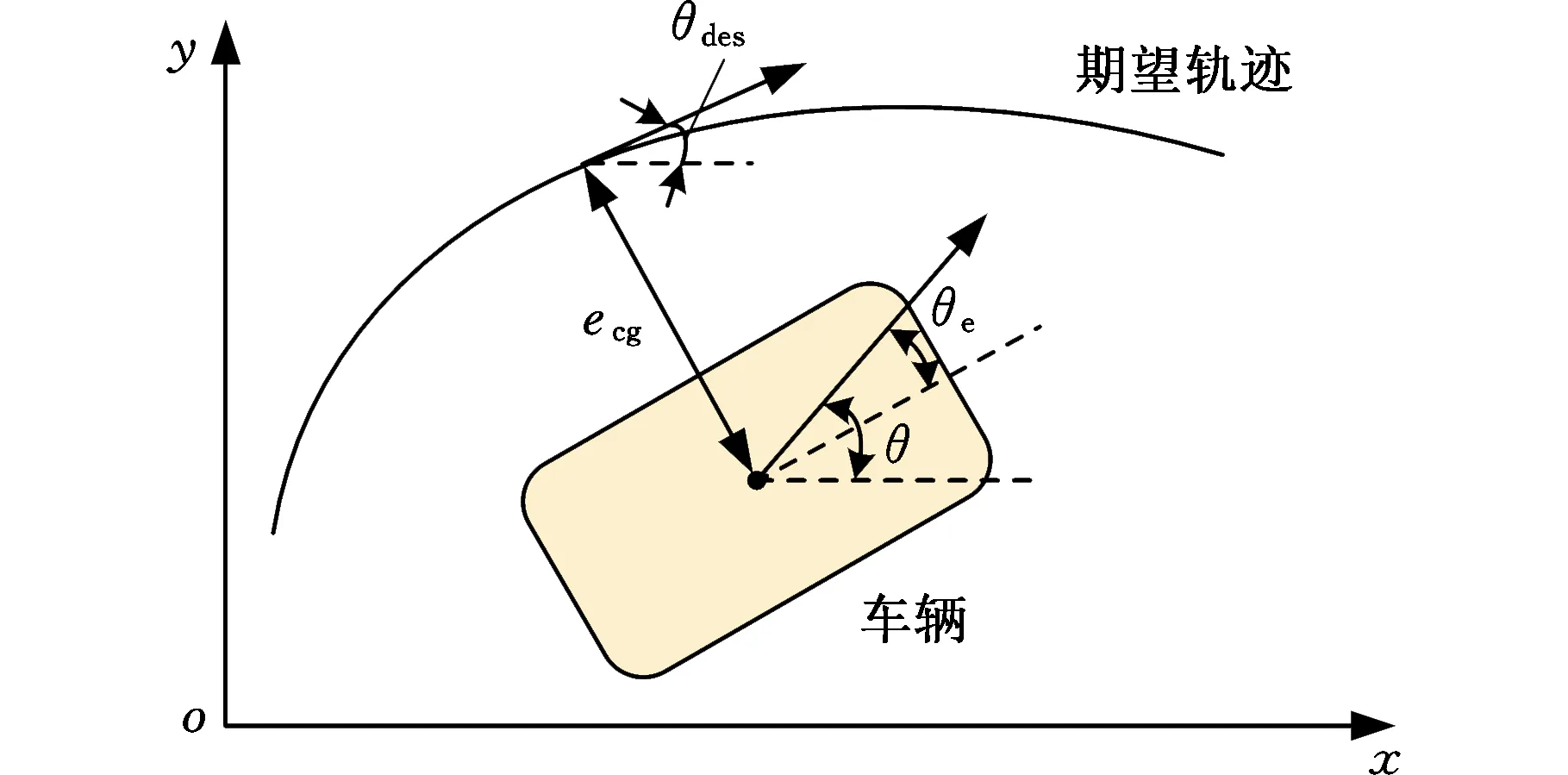
圖2 汽車質(zhì)心處橫向誤差與期望軌跡的關(guān)系
(6)
(7)
(8)
將式(6)~式(8)代入式(5)中,可得關(guān)于橫向速度誤差、橫向加速度誤差、側(cè)偏角速度誤差和側(cè)偏角加速度誤差的狀態(tài)方程:
(9)
2 車輛橫向控制策略
2.1 最優(yōu)LQR橫向控制算法
LQR是現(xiàn)代控制理論中最常用、最成熟的一種控制算法,在智能車輛無人駕駛的軌跡跟蹤中應(yīng)用較多。一般是利用期望軌跡及其曲率得到前饋控制量,然后計算車輛當(dāng)前狀態(tài)與期望軌跡之間的狀態(tài)誤差,采用LQR前饋控制和反饋控制相結(jié)合的方法,實(shí)現(xiàn)無人駕駛車輛軌跡跟蹤[17]。本文將LQR橫向控制算法的軌跡跟蹤思想引入車道保持控制,以質(zhì)心橫向距離誤差和側(cè)偏角誤差為輸入變量,通過使性能指標(biāo)函數(shù)取得最小值,最終求得最優(yōu)期望前輪轉(zhuǎn)角。采用LQR最優(yōu)橫向控制算法,可以滿足系統(tǒng)快速性和實(shí)時性要求,使系統(tǒng)達(dá)到較好的性能,并且該算法簡單,容易實(shí)現(xiàn),在工程應(yīng)用中具有重要意義。
(10)
根據(jù)實(shí)驗(yàn)車的相關(guān)參數(shù),計算得到矩陣A兩個特征根為0,說明狀態(tài)方程不穩(wěn)定,必須引入反饋控制。
可以求出秩R[B1AB1A2B1A3B1]=4,說明該系統(tǒng)可控,設(shè)計系統(tǒng)控制律為
(11)
式中,k1~k4為反饋矩陣K的4個元素。
采用線性二次型調(diào)節(jié)器計算矩陣K的4個元素。設(shè)Ad和Bd為矩陣A和B1的離散形式,則系統(tǒng)的輸出可表示為
δ(k)=-Kx(k)
(12)
其中,R為加權(quán)系數(shù),矩陣P滿足黎卡提代數(shù)方程:
(13)
性能指標(biāo)函數(shù)為
(14)
假定Q=diag(q11,q22,q33,q44),為了簡化計算,令q22=q33=q44=0。利用MATLAB可以求得矩陣K的4個元素,代入式(11)可以求出汽車最優(yōu)期望前輪轉(zhuǎn)角。
2.2 人機(jī)協(xié)同控制策略
李進(jìn)等[18]提出了車道保持偏差的概念,即車道保持偏差與橫向偏差和航向偏差有關(guān),但在實(shí)際應(yīng)用中,還需考慮車速條件。本文引入車輛偏離安全程度D,基于車輛橫向距離誤差ecg、車輛側(cè)偏角誤差θe和縱向車速vx共同確定D值大小,評估車輛偏離安全狀態(tài)。所設(shè)計的模糊規(guī)則依據(jù)如下:當(dāng)車輛發(fā)生偏離時,ecg、θe和vx值越大,車輛偏離車道中心線的趨勢越快,則危險程度越高;反之則越低。模糊控制器的輸入為橫向距離誤差、側(cè)偏角誤差和車速三個變量,輸出為車輛偏離安全程度D。根據(jù)實(shí)車試驗(yàn)經(jīng)驗(yàn)值,綜合考慮了測試系統(tǒng)安全性和可靠性,設(shè)論域Uecg=[-0.3 m,0.3 m];論域Uθe=[-0.01 rad,0.01 rad];論域Uvx=[25 km/h,90 km/h],其模糊子集均為{S,M,L}。輸出量論域UD={0,1,2},模糊子集為{Z,PM,PL},分別表示安全狀態(tài)、過渡狀態(tài)和危險狀態(tài)。輸入、輸出均采用三角形隸屬度函數(shù),具體模糊規(guī)則見表2。
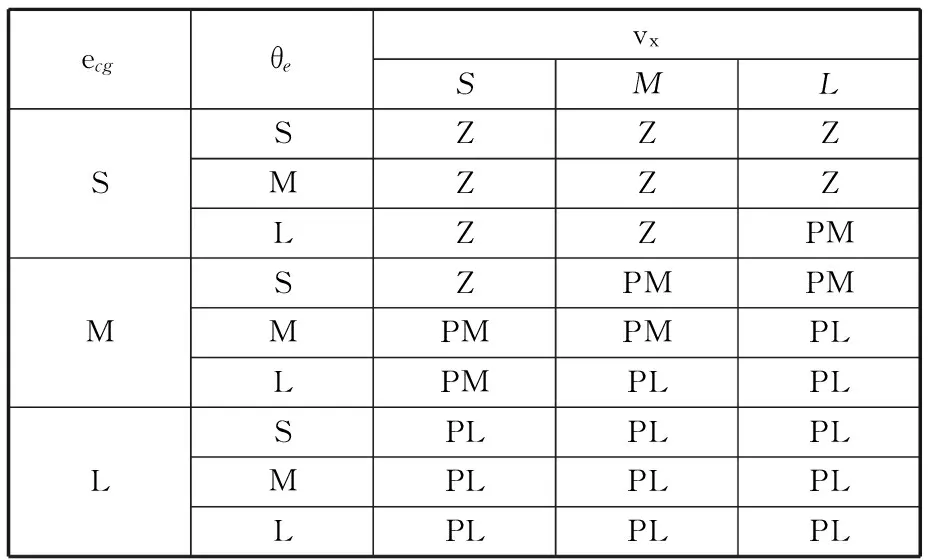
表2 模糊控制規(guī)則表
根據(jù)模糊規(guī)則控制表,進(jìn)行車道保持系統(tǒng)模式判斷。當(dāng)車輛處于安全狀態(tài)時,系統(tǒng)處于駕駛員模式,不干預(yù)車輛正常行駛;當(dāng)車輛處于過渡狀態(tài)和危險狀態(tài)時,車道保持系統(tǒng)切換為助力糾偏模式,報警提示駕駛員車輛發(fā)生偏離并執(zhí)行糾偏命令,將車輛糾回車道線內(nèi)正常行駛。
歐盟新車安全評鑒協(xié)會和國際自動機(jī)工程師學(xué)會報告指出[19],車道保持輔助系統(tǒng)應(yīng)充分考慮控制系統(tǒng)安全性,避免人機(jī)沖突。為了更好地實(shí)現(xiàn)人機(jī)交互,本文根據(jù)車輛的偏離狀態(tài)和車速信號對車輛進(jìn)行安全評估,并采用扭矩控制策略,實(shí)現(xiàn)人機(jī)協(xié)同控制。人機(jī)協(xié)同控制結(jié)構(gòu)如圖3所示。
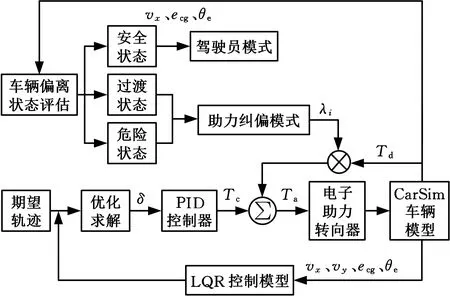
圖3 人機(jī)協(xié)同控制結(jié)構(gòu)圖
車輛和道路傳感器輸出車路狀態(tài)信息到LQR控制模型中,與車輛中心線位置進(jìn)行比較后,通過最優(yōu)求解器計算出最優(yōu)期望前輪轉(zhuǎn)角,經(jīng)過PID控制算法輸出助力扭矩Tc:
(15)
式中,KP、KI、KD別分為控制器的比例、微分、積分項(xiàng)系數(shù);Δδ(t)為期望轉(zhuǎn)角與實(shí)際輸出轉(zhuǎn)角的偏差值。
在助力糾偏模式下對駕駛員實(shí)際扭矩Td進(jìn)行加權(quán)處理,最終輸出的輔助扭矩Ta為
Ta=Tc+λiTdi=1,2
(16)
其中,λ1、λ2分別為過渡狀態(tài)和危險狀態(tài)的駕駛員實(shí)際扭矩加權(quán)系數(shù)。根據(jù)文獻(xiàn)[20]前饋補(bǔ)償模糊控制器設(shè)計思路,在實(shí)車測試試驗(yàn)中本文λ1、λ2取值分別為0.55和0.8,可以保證車道保持系統(tǒng)響較快,同時控制效果較好。
2.3 安全退出策略
在LKA系統(tǒng)工作時,還要考慮到駕駛員行為狀態(tài)和外界環(huán)境的干擾。例如:駕駛員打開轉(zhuǎn)向燈,意味著駕駛員有變道意圖;駕駛員實(shí)際扭矩較大則為駕駛員欲強(qiáng)行介入駕駛操作,控制駕駛主動權(quán);車輪越出車道邊線距離較大,表示車輛已經(jīng)偏離出本車道;車道線置信度較低說明道路環(huán)境較差。若在上述任何一種情況下執(zhí)行LKA糾偏,易造成系統(tǒng)過分干預(yù)駕駛員操作,帶來不適性和危險性,因此,本文針對此問題,提出一種安全退出策略,在不滿足條件情況下LKA系統(tǒng)退出糾偏,切換到駕駛員控制模式,這樣可保證駕駛員擁有最高駕駛權(quán),實(shí)現(xiàn)駕駛相對安全性。安全退出策略框圖見圖4。圖中,Td為駕駛員實(shí)際扭矩;L為車輪越出車道邊線距離;C為車道線置信度;Tth、Lth、Cth分別為對應(yīng)閾值。參考GB/T39323—2020《乘用車車道保持輔助系統(tǒng)(LKA)性能要求及試驗(yàn)方法》和實(shí)車測試試驗(yàn),取Tth=1.5 N·m、Lth=0.4 m、Cth=2。
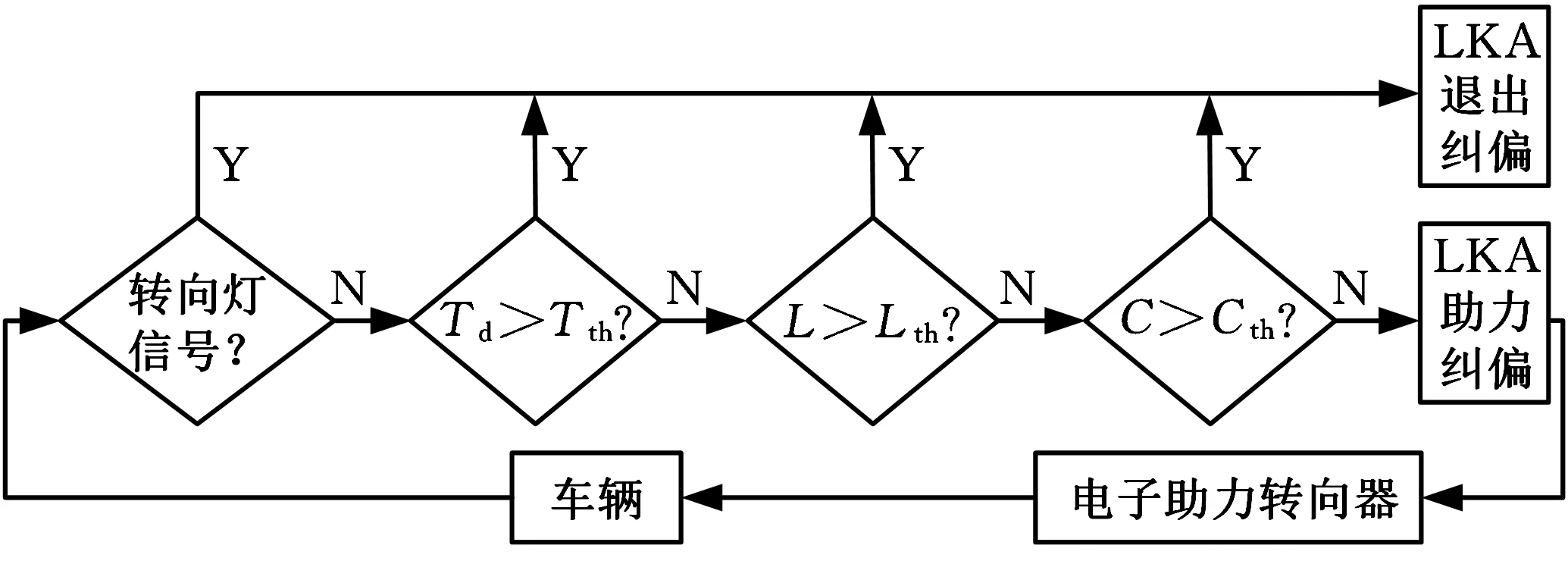
圖4 安全退出策略框圖
3 仿真與實(shí)車測試
3.1 仿真參數(shù)設(shè)置
為了驗(yàn)證本文所提橫向控制算法的控制效果,基于CarSim/Simulink仿真軟件平臺,以車輛動力學(xué)模型為控制對象搭建閉環(huán)仿真模型。在CarSim中設(shè)置仿真模型的輸入信號為駕駛員扭矩(IMP_STEER_T_IN),輸出信號為橫縱向車速(Vx)、車輛航向角(Yaw)、質(zhì)心縱坐標(biāo)(Y0)、轉(zhuǎn)向盤轉(zhuǎn)角(Steer_SW)。仿真環(huán)境如圖5所示。
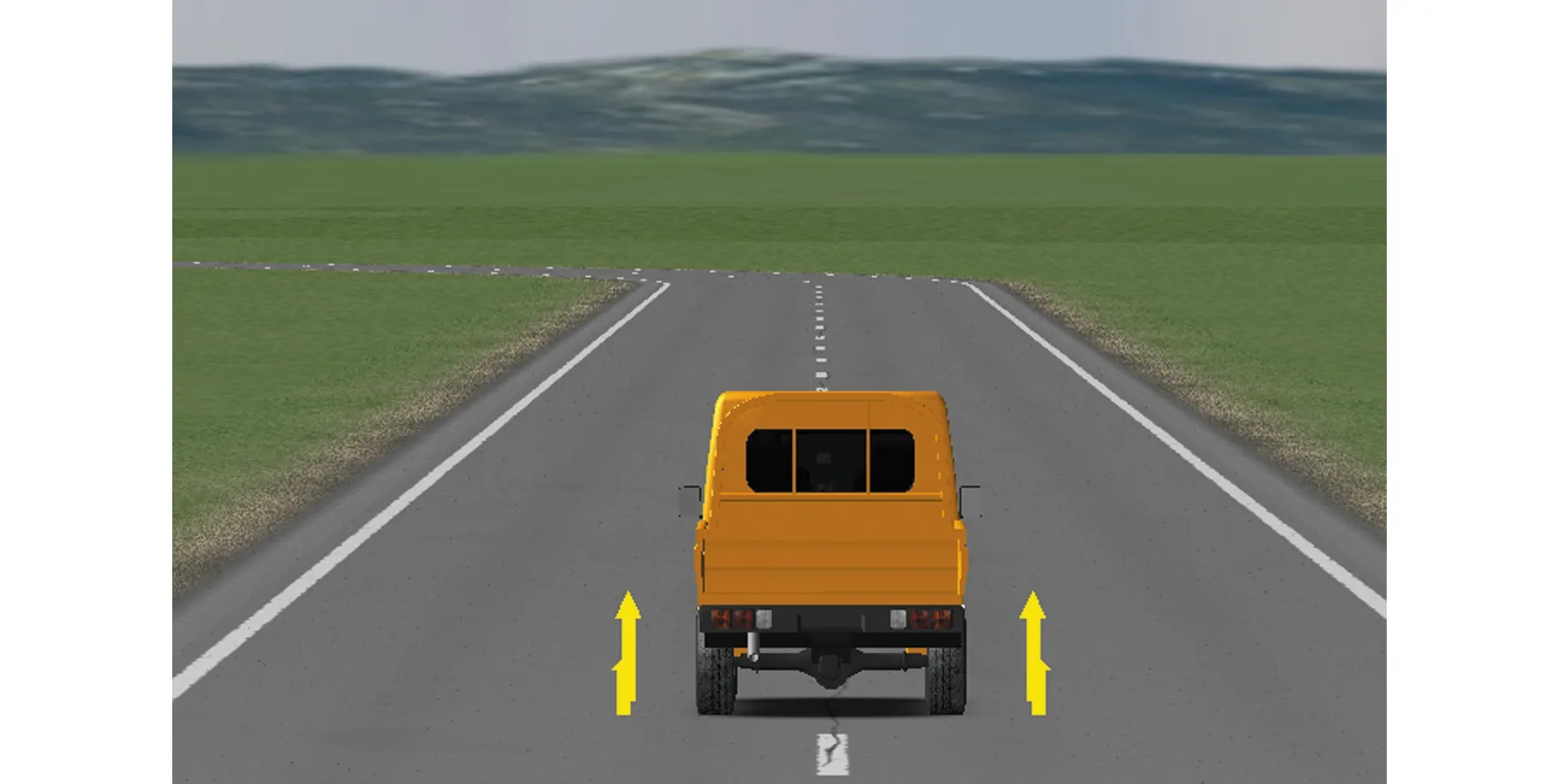
圖5 仿真環(huán)境
整車模型以CarSim中的Utility Truck為基礎(chǔ),修改其中部分車型參數(shù)值。車輛距離車道邊線的初始距離值為0.3 m,車輛側(cè)偏角初始角度為0.01 rad,仿真車速恒定為60 km/h,路面附著系數(shù)設(shè)置為0.85。假設(shè)初始條件設(shè)置均達(dá)到車道保持系統(tǒng)的激活條件,整車參數(shù)如表3所示。
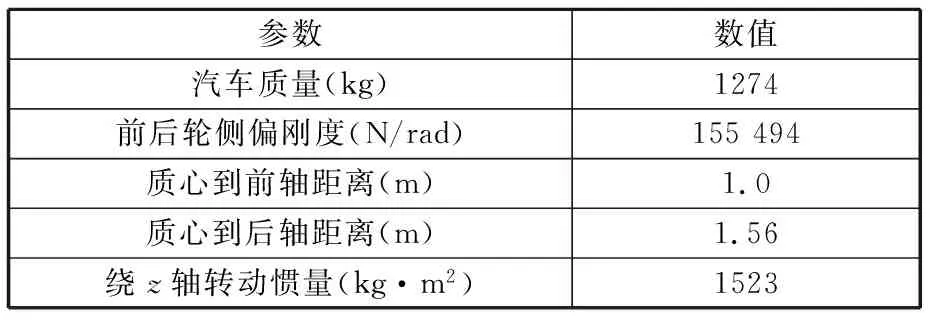
表3 仿真實(shí)驗(yàn)整車參數(shù)
3.2 橫向控制算法仿真
仿真實(shí)驗(yàn)分為兩部分:一是探究基于LQR-PID控制算法中不同Q、R參數(shù)對系統(tǒng)的影響,目的是驗(yàn)證控制算法的可行性,獲得最優(yōu)參數(shù)值;二是對比PID算法、預(yù)瞄-跟隨算法和LQR算法,分析采用不同算法之間控制效果差異。
根據(jù)2.1節(jié)推導(dǎo)的系統(tǒng)狀態(tài)方程,分析在前輪轉(zhuǎn)角控制輸入作用下,車輛橫向距離誤差和側(cè)偏角誤差的響應(yīng)特性,結(jié)果如圖6、圖7所示。本文期望的響應(yīng)特性是誤差能夠快速、穩(wěn)定地趨近于零,并保持平衡。從仿真結(jié)果可以看出,不同的參數(shù)取值對車輛橫向距離誤差和質(zhì)心側(cè)偏角度誤差影響較大。加權(quán)系數(shù)R增大表示控制輸入盡可能小,當(dāng)R=0.001時,橫向距離誤差和質(zhì)心側(cè)偏角誤差較小,并最終能夠趨近于0;矩陣Q中的元素增大表示偏差能夠快速趨近于0,q11取值越大,系統(tǒng)收斂速度越快,但是質(zhì)心側(cè)偏角誤差會相應(yīng)增大。綜合理論分析及多組實(shí)驗(yàn)數(shù)據(jù),得出實(shí)車試驗(yàn)條件下一組優(yōu)化參數(shù)R=0.001、q11=5。

圖6 加權(quán)系數(shù)R取不同值的仿真結(jié)果

圖7 矩陣Q取不同值的仿真結(jié)果
將本文所提出的LQR-PID算法與PID算法和預(yù)瞄-跟隨算法相比較,結(jié)果如圖8所示。圖8a表明,三種控制算法均能實(shí)現(xiàn)車道保持功能。但本文算法系統(tǒng)響應(yīng)速度更快,在2.0 s左右車輛便能夠趨于車道中心線,且橫向距離誤差較小,可以使車輛保持在車道內(nèi),滿足車道保持控制系統(tǒng)的要求。由圖8b可以看出,質(zhì)心側(cè)偏角誤差在-0.038~0.01 rad之間,但是能很快消除誤差,表明車輛在糾偏過程中較平穩(wěn)。
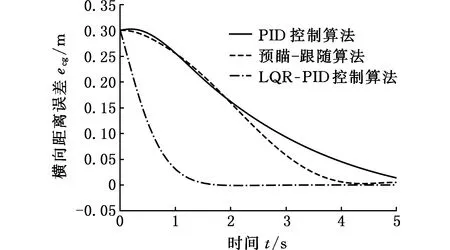
(a)橫向距離誤差
仿真實(shí)驗(yàn)驗(yàn)證了LQR-PID控制算法的有效性,系統(tǒng)快速響應(yīng)更便于及時將偏離車輛糾回車道線內(nèi)行駛,提高系統(tǒng)安全性,達(dá)到了設(shè)計目標(biāo)。
3.3 實(shí)車試驗(yàn)
仿真實(shí)驗(yàn)結(jié)果表明,本文提出的LQR-PID控制算法能夠?qū)崿F(xiàn)車道保持控制功能,并且與PID控制和預(yù)瞄-跟隨控制算法比較,LQR-PID算法具有更好的控制效果。在CarSim/Simulink仿真實(shí)驗(yàn)基礎(chǔ)上,針對人機(jī)協(xié)同控制和安全退出策略進(jìn)行實(shí)車測試試驗(yàn),驗(yàn)證系統(tǒng)安全性。
Mobileye 630傳感器是一款基于視覺系統(tǒng)分析和數(shù)據(jù)處理的輔助駕駛產(chǎn)品,其主機(jī)安裝在車內(nèi)前擋風(fēng)玻璃中間位置,利用車輛、車道線、交通標(biāo)志及行人檢測技術(shù),來測量車到左右車道線距離、車道線置信度和道路曲率等信息。此外,也能從車輛CAN總線獲取車速和左右轉(zhuǎn)向燈信號等信息。Mobileye 630主要性能參數(shù)見表4。
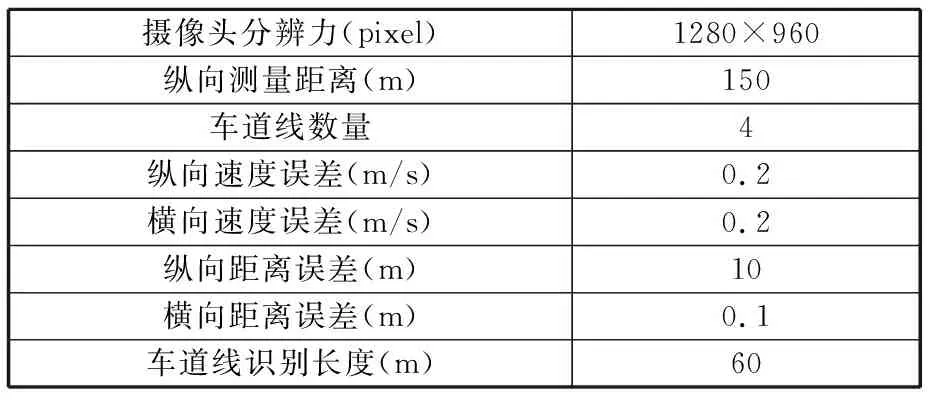
表4 Mobileye 630主要性能參數(shù)
本文采用Mobileye 630傳感器感知周圍環(huán)境,主要獲取車道線距離、車道線置信度和計算出車輪到車道邊線距離等。選用江淮輕卡試驗(yàn)車,設(shè)計基于STM32的車道保持控制器;采用電子助力轉(zhuǎn)向器(electric power steering,EPS)作為車道保持系統(tǒng)的執(zhí)行機(jī)構(gòu),并且EPS安裝扭矩和轉(zhuǎn)角傳感器,可以檢測駕駛員實(shí)際扭矩和轉(zhuǎn)向盤轉(zhuǎn)角值。各硬件系統(tǒng)間采用CAN總線連接。實(shí)車試驗(yàn)平臺如圖9所示。
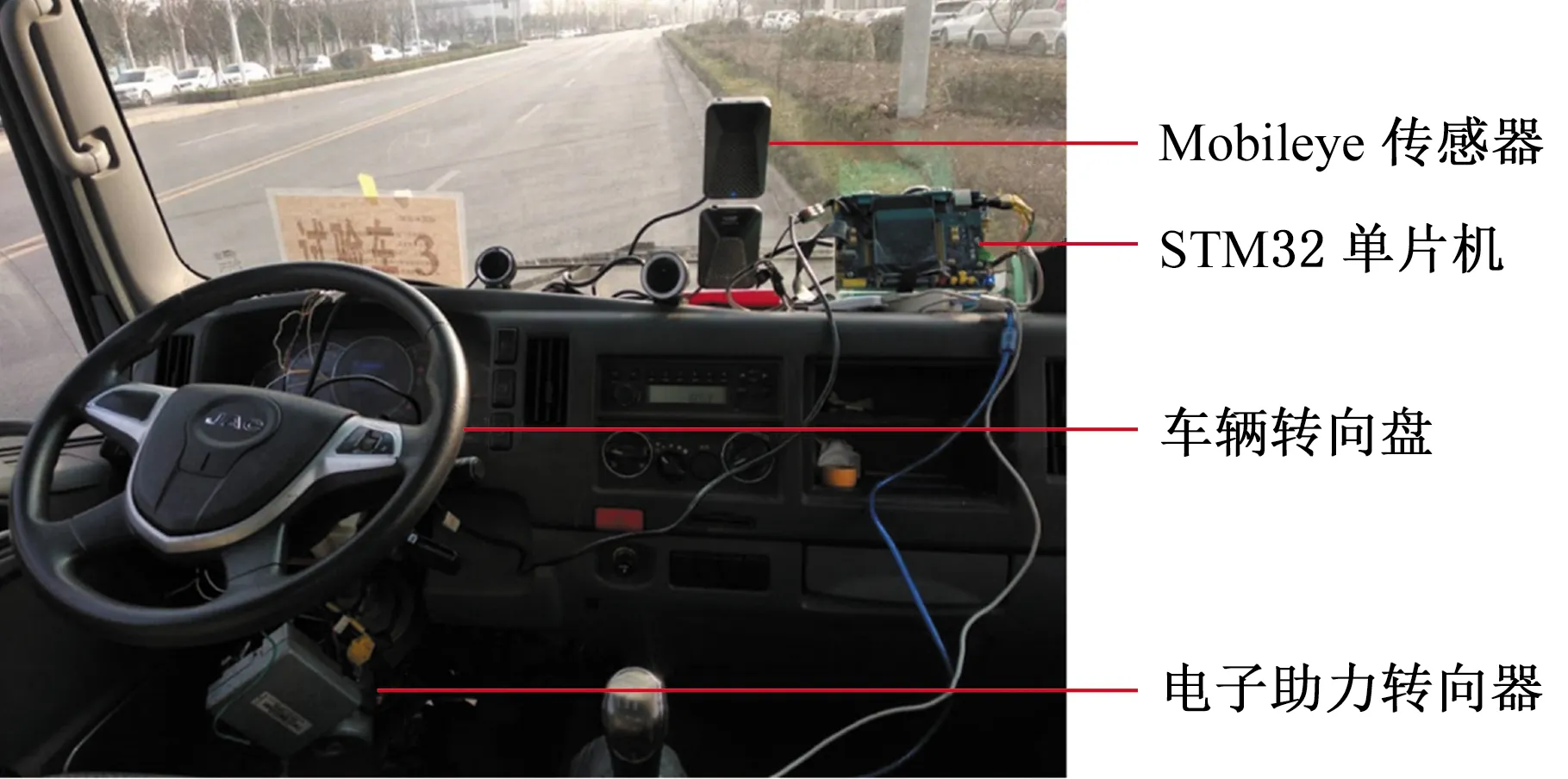
圖9 實(shí)車試驗(yàn)平臺
3.3.1車道保持人機(jī)協(xié)同控制試驗(yàn)
如圖10所示,在1.8 s內(nèi)車輛發(fā)生偏離但處于安全狀態(tài),系統(tǒng)未輸出輔助扭矩。1.8 s后,橫向距離誤差大于設(shè)定閾值,啟動輔助模式,輔助扭矩增加,LKA系統(tǒng)執(zhí)行糾偏動作。整個糾偏過程由駕駛員模擬分心狀態(tài),采用分辨力為0.2 N·m的扭矩傳感器檢測駕駛員實(shí)際扭矩值,由圖10a看出,扭矩范圍為±0.6 N·m。試驗(yàn)結(jié)果表明,該人機(jī)協(xié)同控制的車道保持輔助系統(tǒng)實(shí)現(xiàn)了糾偏功能,使車輛糾回車道中心線附近穩(wěn)定行駛。
(a)駕駛員實(shí)際扭矩
3.3.2安全退出策略試驗(yàn)
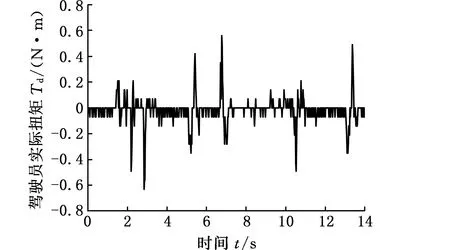
安全退出策略試驗(yàn)結(jié)果如圖11所示,圖11a為駕駛員開啟轉(zhuǎn)向燈試驗(yàn),在6.1 s(即A點(diǎn))時轉(zhuǎn)向燈標(biāo)志位置1,表明駕駛員參與操控車輛,此時輔助扭矩緩慢降為0,輔助系統(tǒng)退出糾偏,將駕駛權(quán)完全移交給駕駛員。圖11b為駕駛員實(shí)際扭矩試驗(yàn),在4.0 s(即B點(diǎn))之前,駕駛員實(shí)際扭矩較小,當(dāng)車輛發(fā)生偏離時,系統(tǒng)認(rèn)為駕駛員沒有參與,輸出輔助扭矩,執(zhí)行糾偏功能;當(dāng)駕駛員實(shí)際扭矩超過1.5 N·m的閾值時,系統(tǒng)認(rèn)為駕駛員參與轉(zhuǎn)向盤控制,則輔助扭矩降為0,系統(tǒng)退出糾偏。對于圖11c、圖11d,則分別是車輪越線過多和車道線置信度較低,在C點(diǎn)和D點(diǎn)處不能滿足車道保持的激活條件,均退出糾偏。試驗(yàn)結(jié)果表明,當(dāng)人-車-路狀態(tài)條件不滿足車道保持輔助系統(tǒng)的激活條件時,系統(tǒng)能夠及時退出糾偏,防止系統(tǒng)過多干預(yù)駕駛員,提高了系統(tǒng)安全性。
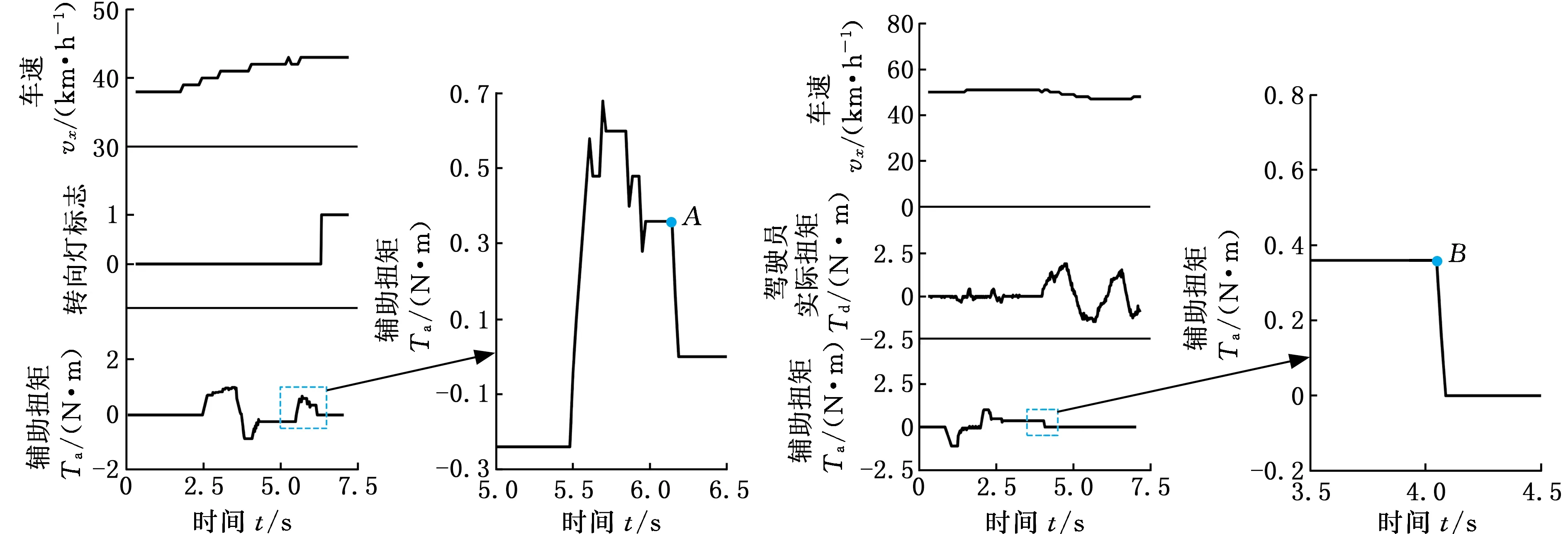
(a)駕駛員開啟轉(zhuǎn)向燈試驗(yàn) (b)駕駛員實(shí)際扭矩試驗(yàn)
4 結(jié)論
(1)本文基于車輛動力學(xué)模型,提出一種LQR-PID橫向控制方法,通過CarSim/Simulink軟件平臺進(jìn)行聯(lián)合仿真,驗(yàn)證了LQR-PID算法不僅可以保證車輛穩(wěn)定地在車道中心線附近安全行駛,且響應(yīng)速度更快。
(2)本文在仿真實(shí)驗(yàn)的基礎(chǔ)上,基于橫向距離誤差、側(cè)偏角誤差和車速,對車輛偏離狀態(tài)進(jìn)行安全評估并設(shè)計了輔助系統(tǒng)安全退出策略,實(shí)車試驗(yàn)結(jié)果表明,該系統(tǒng)在不滿足條件時能夠及時退出糾偏,避免人機(jī)沖突,保證駕駛員的絕對駕駛權(quán),實(shí)現(xiàn)車道保持功能和系統(tǒng)安全性能。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
汽車實(shí)用技術(shù)(2022年14期)2022-07-30 06:13:42
汽車實(shí)用技術(shù)(2022年4期)2022-03-07 06:07:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19