一種無人機集群安全高效的分區集結控制策略
2021-08-26 08:11:00趙太飛宮春杰
電子與信息學報 2021年8期
趙太飛 宮春杰 張 港 張 爽
①(西安理工大學自動化與信息工程學院 西安 710048)
②(陜西省智能協同網絡軍民共建重點實驗室 西安 710000)
1 引言
單架無人機(Unmanned Aerial Vehicle,UAV)因時間、空間、任務層面的沖突而難以完成的復雜任務,無人機集群可以以其數量的優勢通過協同工作而輕松完成[1],巨大的潛力使之成為多個領域的研究熱點[2,3]。無論是軍用的空中偵查、蜂群協同作戰還是民用的舞臺表演、大型活動航拍,效率和能耗都是無人機集群作業過程中兩個非常重要的指標,作為集群協同執行任務的第1步,高速率、低能耗、安全的編隊集結可以為后續任務的執行提供有效保障[4]。
無線紫外光通信(UltraViolet Communications,UVC)具有局域保密性好、抗干擾能力強、竊聽率低、位辨率低、背景噪聲小、全天候、非直視通信等優點[5],另外紫外光收發裝置結構簡單、成本低、可靠性高、輕便易搭載[6],可以在無人機集群工作的多種復雜場景中進行穩定的機間通信。
關于編隊集結,國內外學者已進行了大量研究并取得了一些成果。Reynolds[7]在觀察群體生物活動規律的基礎上改進粒子系統,提出一種極化的、非碰撞的無人機集群運動模型。Daniel等人[8]在此基礎上提出了一種避免無人機集群自分離的通道感知轉向策略,但未考慮機間防碰撞。Gazi等人[9]提出了一種分散控制策略,利用勢場法模擬群體的集結。Olfati-saber等人[10]利用從所需編隊的結構約束中獲得的自然勢函數為每一輛自主機器人提供無碰撞、分布和有界的狀態反饋律。Easthope[11]通過粒子濾波法為無人機集群的質心提供穩定的軌跡,令各UAV跟蹤該質心從而實現集群的穩定。朱旭等人[12]利用協同變量令各UAV先以較高的速度快速集結成松散編隊,再降低幾何約束逐步聚集成緊密編隊,提高平均集結效率。部分學者通過路徑規劃來實現無人機集群安全、快速集結。Alejo等人[13]提出了一種基于粒子群的隨時逼近方法,快速計算出當前可用計算時間內質量最高的4維軌跡規劃。倪良巧等人[14]基于Dubins算法在單機規劃層為每架UAV規劃出4條最短路徑,再在多機協同規劃層利用繞圈等待等控制策略實現多機同時集結到位。雖然優化路徑規劃算法提高其收斂速度可以在避障的同時加快集結速度,但這必然會導致航跡非直線而產生多余的飛行能耗。
本文在文獻[12]位置協同變量的基礎上提出了一種無人機快速、安全集結的新思路—分區集結。通過將近集結點區域劃分為互不影響的獨立分區并規劃各區內UAV的集結順序,有效提高集結效率、減少多余飛行能耗,在不采用額外避碰措施,僅依靠集結策略本身也能有效降低碰撞概率。
2 分區集結控制策略
2.1 控制策略描述
無人機集群由多架UAV模擬動物群體行為通過感知交互、信息傳遞,在一定的規則下呈現出整體的行為[15]。在微觀學中,反應物的濃度越高,粒子間布朗運動相互碰撞的概率越大,反應速度也就越快[16]。降低反應物濃度可以減緩布朗運動,類比到UAV集結的場景中,在有限區域內同時移動的UAV越少,發生碰撞的概率就越低。基于此思想提出了一種適用于旋翼UAV在近集結點區域進行高效集結活動的分區集結方法。將近集結點區域平均劃分成幾個分區,UAV進入某個分區后的活動范圍嚴格限制在該分區內部,這樣不同分區內的UAV就不會發生碰撞。將每個分區視為獨立的空間,每個空間同一時刻在一定范圍內只允許一架UAV移動,分區數越多,可同時移動且不會發生碰撞的UAV個數也越多,這將會大大提高集結效率。
首先根據集結區域、編隊圖案[17]和各UAV的初始位置設定參考集結點位置、計算目標集結點坐標[18]以及分配目標集結點[19]。以參考集結點為中心將3維近集結點區域人工劃分為不同等份,詳細分區方式見圖1。
圖1(a)為將參考集結點所在平面以參考集結點為中心等分為3份和6份的情況,將區域間的分界線豎直延伸成面,即可將3維的集結區域等分為立體的3份和6份,如圖1(b)所示。這些分界面是虛擬的,為不同分區內的UAV隔出獨立的航行區域。每個分區具有編號,目標集結點分布在不同標號的分區內,引導UAV從遠處向其靠近,各UAV在進入近集結點區域的同時進入對應目標集結點所在的分區。

圖1 分區方式示意圖

2.2 控制策略分析

由結論可得,集結方式(2)和集結方式(4)的碰撞次數均約等于0,但集結方式(2)令每架UAV全程以同一速度進行集結,在實際場景中沒有必要且需要付出多余的控制代價,方式(4)的集結時間雖然較長,但可以通過分區集結增加同時移動的UAV數目從而成倍降低集結時間,綜合考慮下,分區集結策略采用集結方式(4)更加合適。確定好集結方式后,將從集結時間、平均集結時間、預測碰撞概率幾個方面來分析分區集結控制策略的性能。
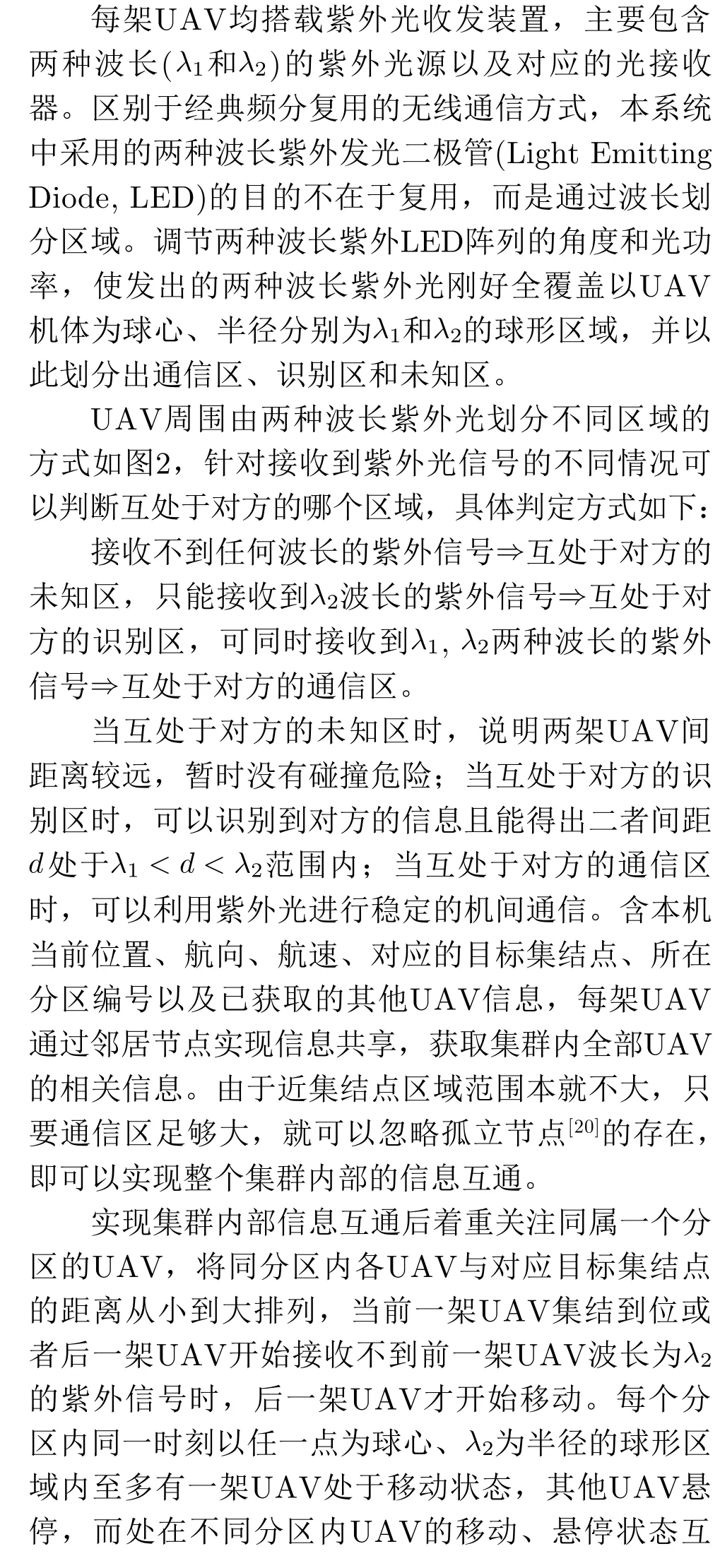
圖2 無人機周圍由紫外光劃分的不同區域

圖3 3架無人機的航行軌跡

3 仿真實驗
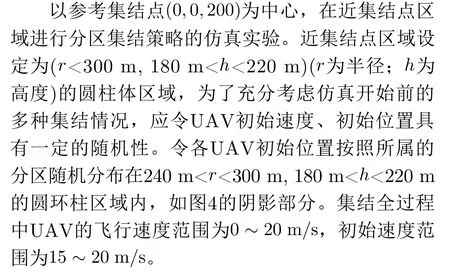
各UAV在進入近集結點區域前就向所分配的目標集結點航行,即各UAV在仿真開始時的初始航向為當前位置朝向對應目標集結點的方向,繼續沿直線集結則航向不變。本實驗分別仿真了10架、20架、30架UAV在不同分區數下航行至所分配目標集結點且速度剛好降為0的集結時間、平均集結時間、觸發避碰措施次數以及預測碰撞概率,下文中的規律性數據均為仿真10次結果的平均值。
3.1 仿真結果及分析
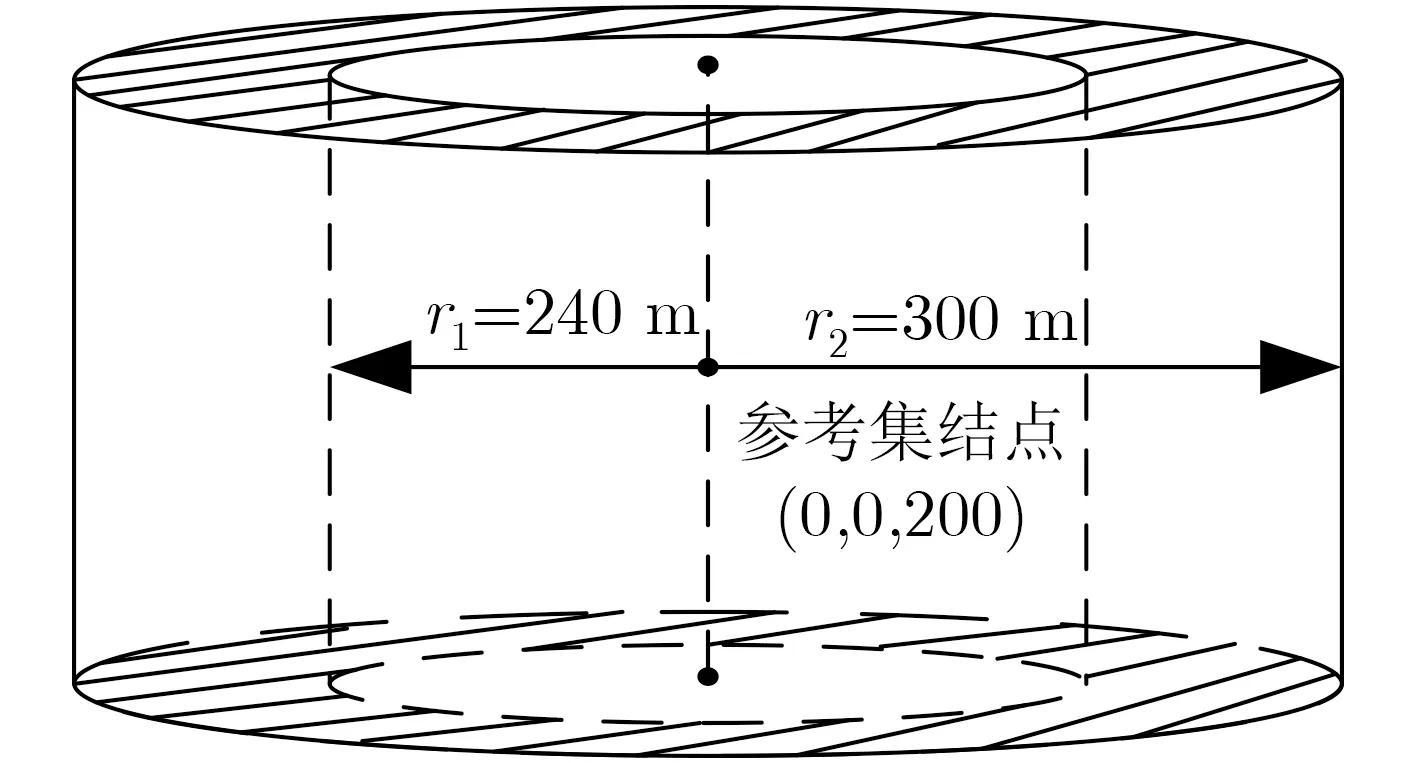
圖4 近集結點區域
集結時間與分區數的關系如圖5所示。從圖5(a)中可以看出,隨著分區數的增多,3個UAV總數下集結時間均大幅度降低,說明分區集結確實可以提高集結效率。圖5(b)為集結時間局部數據的放大圖,可以發現集結時間是呈階梯型下降的。由于每架UAV從初始位置到達所分配目標集結點的距離與航行時間均相差不大,因此依次集結時,擁有UAV數量較多的分區集結時間更長。因此集結時間由擁有UAV數量最多的分區決定的,即由各個分區內包含UAV數目的最大值nmost所決定。
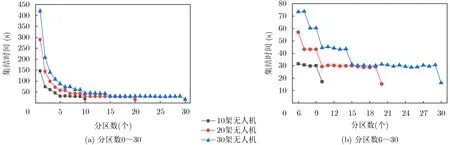
圖5 集結時間與分區數的關系
集結時間與各分區內UAV數目最大值的關系如圖6所示,可以看到3條曲線近乎重合,二者呈近似線性關系,且斜率為每架UAV集結所用時間的平均值。為了盡量減少集結時間,應令每個分區內UAV的個數平均,即需要合理設計編隊圖案,使目標集結點盡量均等地分布在每個分區內。由于分區數k與UAV總數s一定是整數,所以當s/k不是整數時,各分區擁有UAV的數目也稍有差異,因此在不同的分區數下,只要nmost相同,集結時間也相差不大,處于同一階梯。平均集結時間與分區數的關系如圖7所示,可以觀察到,3個UAV總數下的平均集結時間均隨著分區數的增多先大幅降低,在k約等于s/5處后再緩緩減少,總體軌跡平滑。分區數相同時,30架UAV的平均集結時間總是大于20架、10架UAV,這是因為分區數相同時,30架UAV平均分給每個分區的UAV數量更多,集結時間也就更長。
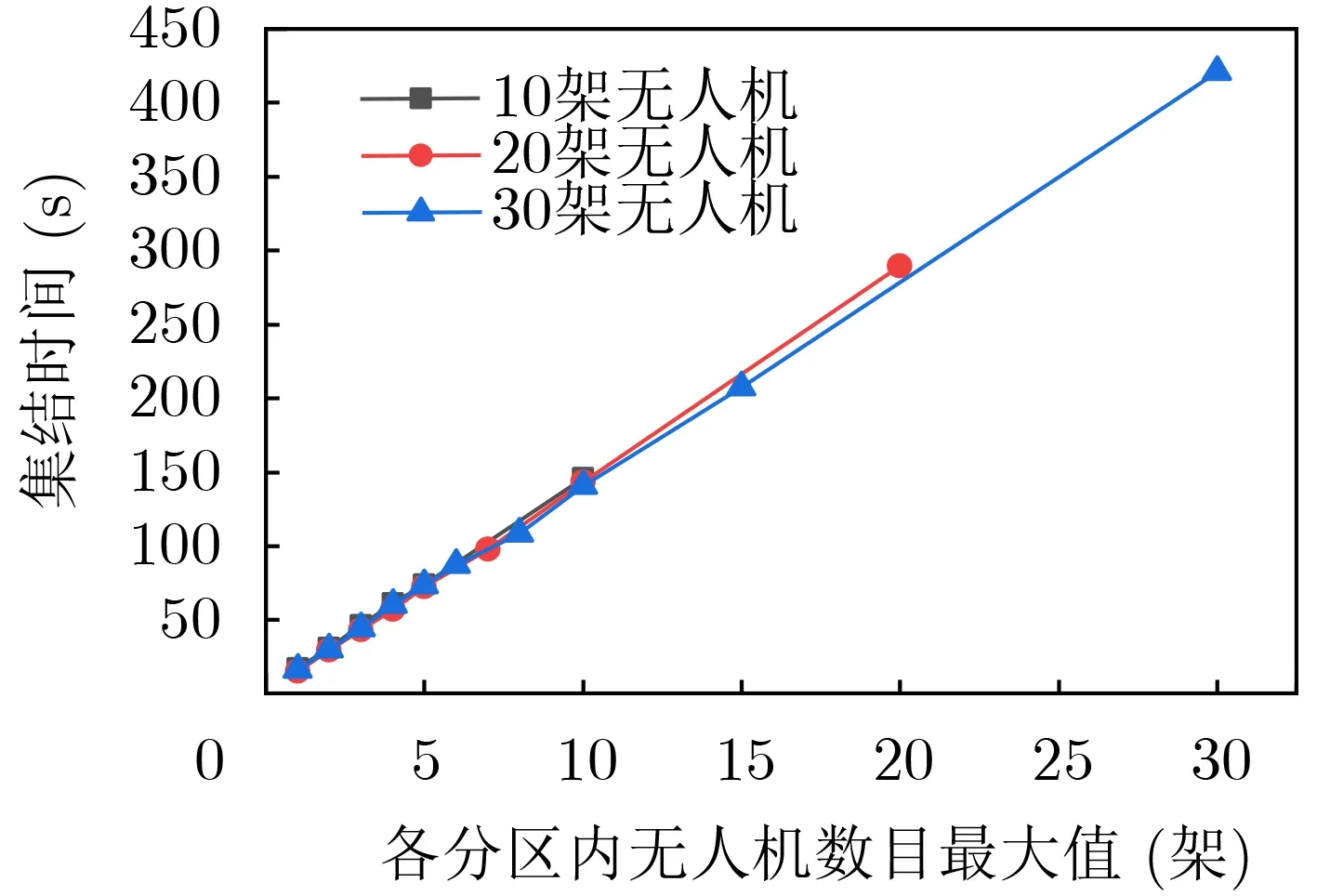
圖6 集結時間與分區內無人機數目最大值的關系
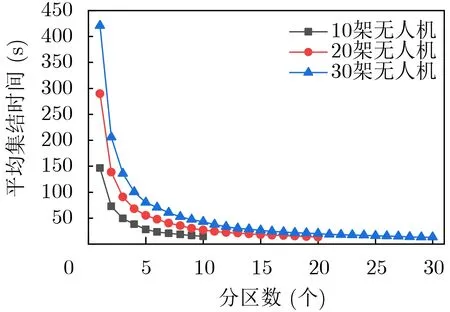
圖7 平均集結時間與分區數的關系
每隔0.05 s更新1次D和A,按照式(5)、式(6)記錄觸發避碰措施的次數n、計算預測碰撞概率P。圖8是觸發避碰措施次數與分區數的關系,圖9是預測碰撞概率與分區數的關系。從圖8、圖9的曲線可以看出,隨著分區數從1到10,20和30,3個UAV總數下觸發避碰措施的次數分別從5,17.2和24.6降為0,0.2和0.3,預測碰撞概率分別由0.0307,0.0649和0.1167降為0,0.0007和0.0013。UAV總數較少時效果最好,20架、30架無人機的n和P均下降了約80倍,這充分證明了分區集結方法可以有效減少碰撞情況的發生。當k=s時,20架、30架UAV的n和P均沒有如理想狀態降為0,這是因為本仿真實驗的范圍只是近集結點區域,同一分區內UAV的隨機初始分布狀態可能滿足碰撞條件,且UAV總數越多,這種情況出現的概率就越大。在實際場景中可以通過在遠集結點處合理引導來減少此類情況的發生,進一步降低碰撞概率。另外,觸發的后續避碰措施也可以進行有效避碰,將集群內部UAV碰撞的危險降到最低。
針對UAV數目過多或空間區域受限的情況,可參考圖5、圖8、圖9中分區數較少時的數據,將3種UAV總數下的T,n和P進行縱向比較。如當k=2時分區數相對較小,每個分區的體積相同,s越多,同一分區內UAV的數目就越多,空間區域越受限。分析圖5、圖8、圖9中k=2時的數值可以得出,隨著s遞增,T,n和P均逐漸增加,即按照本文的集結策略,同一分區內UAV密度越大,集結時間越長,觸發避碰措施的次數越多,預測碰撞概率也越大。
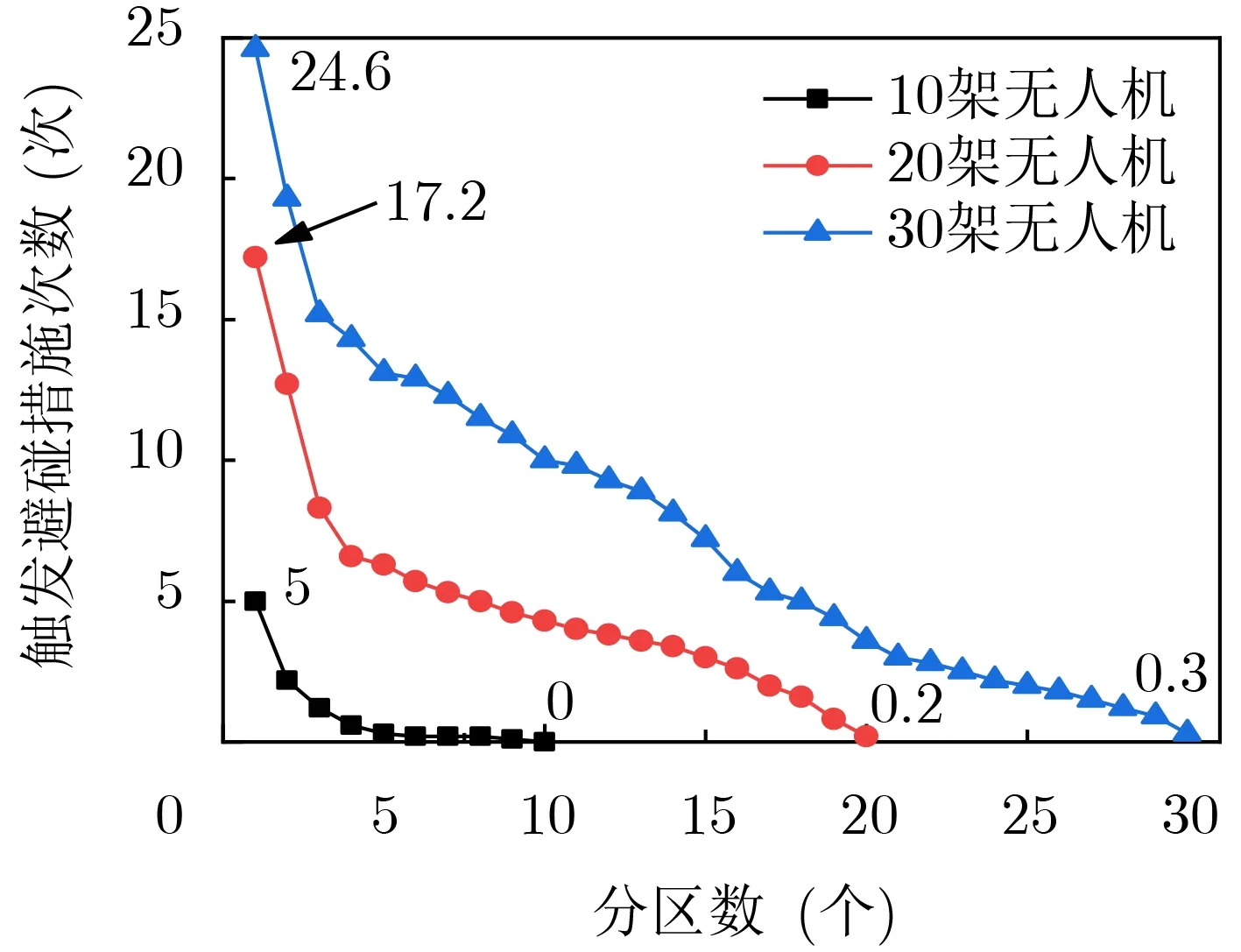
圖8 觸發避碰措施次數與分區數的關系
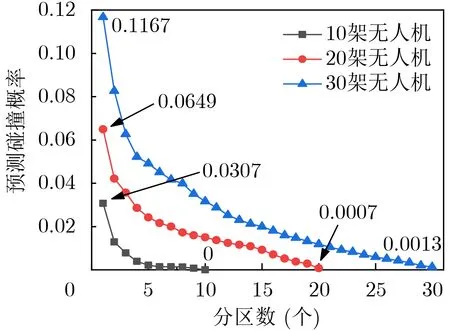
圖9 預測碰撞概率與分區數的關系
為了充分考慮仿真開始前的多種集結情況,將UAV的初始速度、初始位置設為一定范圍內的隨機值,同一架UAV初始速度和初始位置的方差統計值分別如圖10、圖11所示。
由圖10的曲線可以看出,初始速度的方差較小,集中在[ 1,3]且無規律。這是由于各UAV初始速度值的選取僅與UAV的機動特性、任務需求以及天氣狀況有關,本實驗忽略天氣的影響,將初始速度設定為波動較小的15~20 m/s,因此方差也比較小。由圖11的曲線可以看出,隨著分區數增多,3個UAV總數下初始位置的方差均急速下降后緩緩降低,最大值出現在k=1時,達到了67686.23,最小值出現在k=30時,方差值為626.50。3條曲線走勢相同,且k相同時取值相近,因此初始位置方差值僅與分區數,即所在分區空間的大小有關,而與UAV總數及同分區內UAV個數無關。方差值總體較大,說明本實驗充分考慮到了集結開始前UAV的多種集結狀態,也說明前文得出的規律更加具有普適性。
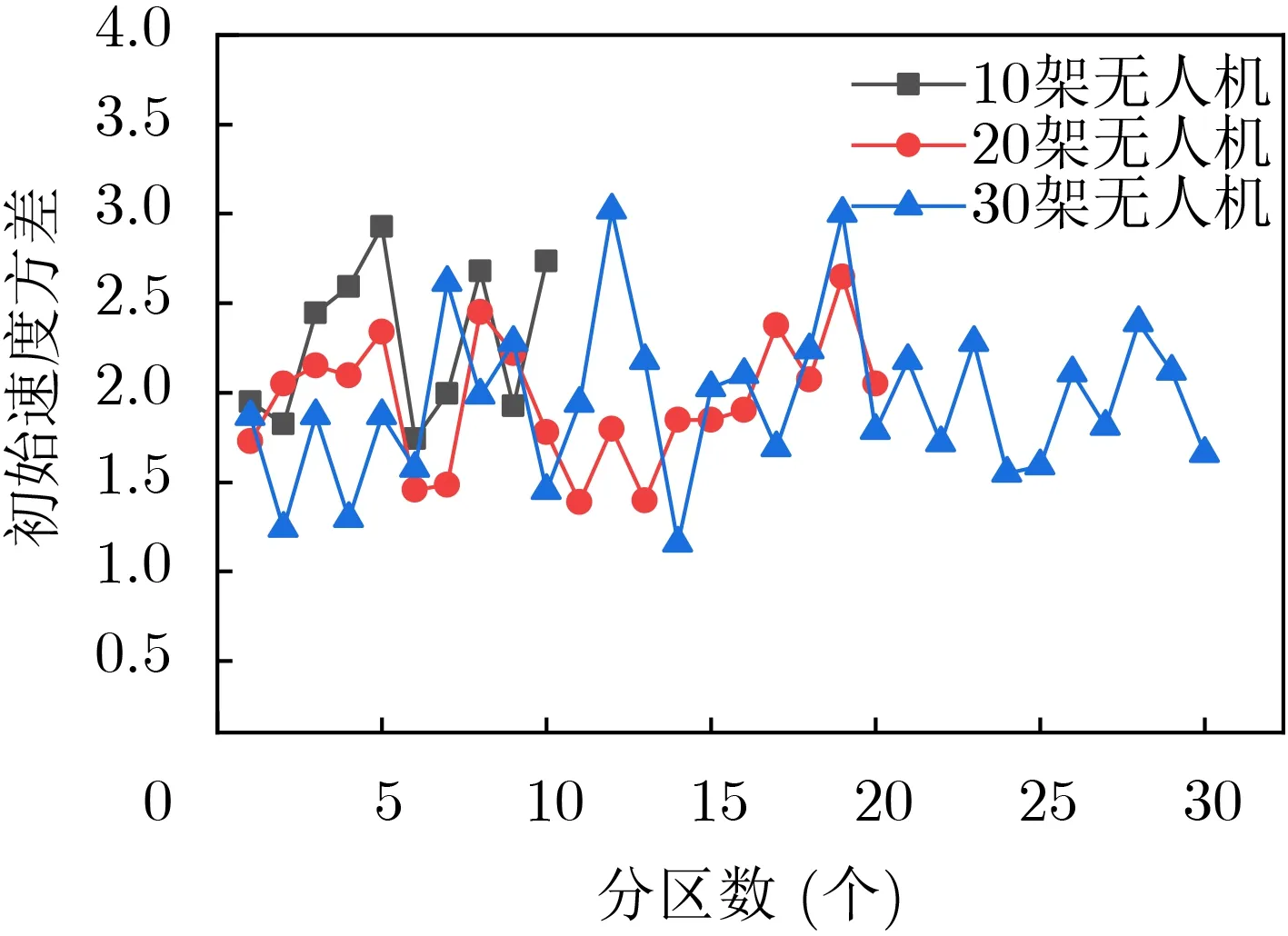
圖10 初始速度方差與分區數的關系
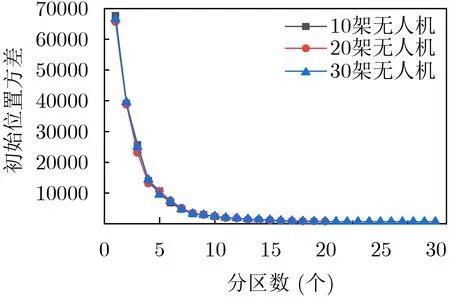
圖11 初始位置方差與分區數的關系
3.2 最佳分區數選擇
最佳分區數nbest是綜合考慮控制代價、集結時間、碰撞概率3個因素后選出的最合適的分區數。分區集結策略的控制代價主要來自兩方面,一個是控制通信時延D c,一個是控制能耗Ec。控制代價函數C為

其中,k1為權重系數。隨著分區數增多,需要監管的區域間分界面的個數和面積也成倍增多,控制能耗隨之增加,與此同時,各個分界面監控信息通信延遲的影響也會疊加,所以Dc,Ec均與分區數成正比。無論k1取何值,隨著分區數的增多,為了確保將每架無人機的活動范圍限制在所屬分區內需要付出的控制代價就越高。通過上述分析以及3.1節的仿真結論,得出以下選擇最佳分區數的方法:
已知無人機集群中UAV的總數為s,將s與k(k ∈[1,s])從小到大依次做除法,將計算結果向上取整得到各分區數下的nmost并按該結果形成階梯。以s/5作為標準,在同階梯內選擇最佳分區數。若s/5不是整數且剛好為兩個階梯的分界則選擇較低的階梯作進一步選擇;若s/5所處階梯或其下一個階梯只包含1個分區數,將兩個階梯暫時視為1個階梯做進一步選擇。同階梯內選擇最佳分區數的原則如下:若著重考慮低控制代價,選擇階梯內最左側的分區數;若著重考慮低碰撞概率、少集結時間,選擇階梯內最右側的分區數。
以s=10,30,50,70,90為例,按照選取原則得到的不同需求下最佳分區數的選擇結果如圖12所示。可以看出,s越 大,按照選取原則選出的kbest越大,且在兩種著重考慮因素下選出的kbest間差值也越大。著重考慮低控制代價選出的kbest更接近于s/5,而著重考慮低碰撞概率、少集結時間選出的kbest總是大于著重考慮低控制代價選出的kbest。
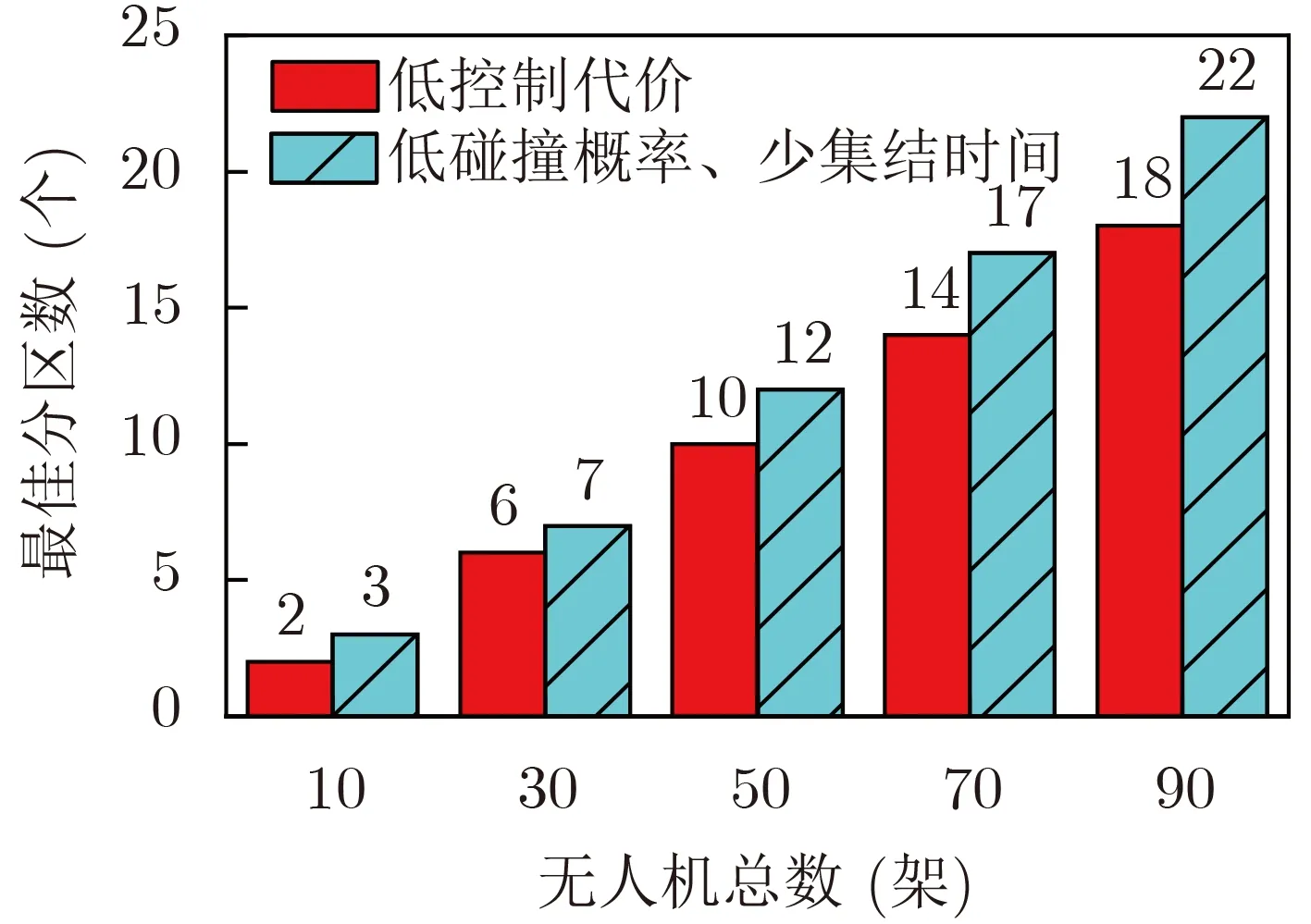
圖12 最佳分區數選擇
4 結束語
本文提出了一種利用無線紫外光通信實現無人機集群內部信息共享,并將近集結點空域分區,令各分區內同時進行互不影響集結行為的分區集結控制策略。本策略可以有效減少集結時間,未加額外避碰策略就可以有效降低碰撞概率,另外每架UAV沿直線集結,可以有效減少多余飛行能耗。由實驗結果可知:隨著分區數的增多,無人機集群的集結時間呈階梯型下降,所處階梯的高度與該分區數下各區擁有UAV數目的最大值呈近似線性關系;隨著分區數的增多,控制代價升高,預測碰撞概率大幅下降后緩緩降低至接近于0,UAV總數越少效果越好。根據上述規律,還提出了一種根據控制代價、集結時間、碰撞概率等不同需求選擇最佳分區數的方法。另外,所提集結策略需要對近集結點區域進行等體積分區并要求UAV盡量平均分布于每個分區,后期可以考慮根據UAV的當前散落狀態以UAV的數目按比例劃分各區域,更滿足實際場景的需求。
猜你喜歡
今日農業(2021年9期)2021-11-26 07:41:24
發明與創新·小學生(2021年3期)2021-03-25 11:48:49
能源工程(2020年6期)2021-01-26 00:55:22
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
中國科技博覽(2016年2期)2016-04-25 20:32:39
通信電源技術(2016年1期)2016-04-16 04:57:26
電測與儀表(2016年20期)2016-04-11 11:38:24
小學生導刊(2016年34期)2016-04-11 00:49:44
電測與儀表(2015年5期)2015-04-09 11:30:52