基于捷聯慣導系統的采煤機定位技術
2021-08-27 07:29:30劉瀚文
能源與環保 2021年8期
劉瀚文
(國家能源集團 烏海能源有限責任公司,內蒙古 烏海 016000)
煤炭能源是無法被其他資源取代的,是一種極富競爭力的經濟型資源[1]。我國在資源方面具有“富煤、貧油、少氣”的特征,由此使得煤炭資源在整體的資源占比和使用上都居于主要地位,且此種情況一直未變。在原始煤產出量方面,2018年已完成近37億t,一直穩居全球首位,標準煤的銷售數量共計達46億t,煤炭消費總量在能源消費總量當中的大約占了60%,當前我國已探知到的煤炭儲額占全球的1/3以上。預計中國煤炭消費總量到2020年,將達到48億t左右[2-6]。國內外學者們對采煤機的動態定位開展了系統深入的實驗與工程應用研究。張斌等[7]提出了基于陀螺儀和里程計的無人工作面采煤機自主定位系統,并在模擬實驗中取得了較好的定位效果,然而里程計存在固有累積誤差制約定位精度提高的問題。樊啟高[8]利用捷聯慣性導航系統建立了采煤機的位置定位模型,并對采煤機的截割路徑進行了慣性導航仿真。呂振等[9]基于捷聯慣性導航進行了井下移動目標精確定位系統的研究,并且對傳感器的誤差進行了分析烏海能源有限公司到老石旦煤礦地址在內蒙古自治區,烏海有葡萄之鄉、書法之城、黃河明珠以及沙漠綠洲等美稱。老石旦煤礦在采煤過程中普通的慣性零件會出現漂移的情況,經過長時間使用,會造成慣導系統的精準度降低,運用捷聯慣導技術能有效解決此問題。綜上,捷聯慣導系統在運行過程當中不受外界因素干擾,不需要其他信息為輔助,同時也不會散發出輻射,該系統能全面的獲取數據,在短時間內實現高精準度定位,同時又具有能快速更新數據的優點,當前已經被眾多煤礦以及科技人員用于采煤機以及井下人員的定位分析環節。其對于全球煤炭開采行業都有著重要的意義,同時也能將高效化、安全化和綠色化融入到國內在煤礦的研究和發展領域。
1 捷聯慣導系統的原理
捷聯慣導系統是采煤機普遍用到的定位技術,工作原理是在采煤機上連接加速度計以及陀螺儀,對采煤機的旋轉角度、速度以及加速度矢量進行測量,此時的數據是采煤機處于相對于慣性坐標系條件下的數據,之后按照開始載體處于的位置、姿態和速度,對之后任意時間采煤機在同等條件下的角度、位置和速度加以計算。加速度在一次積分之后就能得出機器的速度,經過二次積分能獲得其位置。可以通過對坐標的變化把速度、位置和姿態向所需的坐標系變化。
美國在20世紀80年代開始,就將開創性實驗落實到了煤礦控制和自動化的領域,研究的主要內容就包含對慣性系統的測試,但因為此系統存在精確度不足的問題,未能在煤礦領域投入使用。之后NIOSH研究所以尋找更實用的定位技術為目標,在諸多傳感系統和技術中進行了測試研究,最后慣導技術脫穎而出。此系統由3個線性加速度計和三軸陀螺儀組成,當需要對加速度進行積分來獲知采煤機的位置姿態信息時,一定要以某一參考坐標系為條件。因此,應掌握各空間的坐標系并加以定義才能進一步研究、分析定位技術。慣導系統的解算基礎是慣性定律,也就是牛頓力學。地球坐標系、導航坐標系、慣性坐標系以及采煤機坐標系相互的關系能獲得導航數據。
(1)地球坐標系和地球相關聯,相對于慣性坐標系,圍繞著地球自轉角速率進行旋轉,Ye與Xe處于赤道平面內,軸Ye指90°E,軸Xe指向格林尼治經線,軸Zi重合于軸Ze,λ為經度,L為維度。
(2)導航坐標系用N系表示,采煤機位置所包含的東北天方向由此坐標系表示。采煤機的位置用原點On來表示,Xn表示的是東,Yn表示的是北,Zn表示的是天。
(3)慣性坐標系的簡稱是Ⅰ系,將地球的中心位置用Oi表示,即坐標系中的原點,Zi指北極方向地軸,Xi和Yi處于赤道平面內,組成了右手坐標系,用于測量慣性元件。
(4)采煤機坐標系即B系,采煤機的重心處是圓點,用Ob表示,軸Yb表示推進的方向,軸Xb表示牽引的方向,軸Zb表示向上豎軸。
(5)采煤機姿態包括3個方面,①橫滾角γ;②俯仰角θ;③航向角φ。導航坐標系與采煤機坐標系兩者的轉角能確定這幾個角度,軸Zb來自采煤機坐標系,其和平面OnZnXb形成的夾角就是橫滾角γ,范圍是-90°到90°;平面OnXnYn來自導航坐標系,軸Xb與其組成的夾角就是俯仰角θ,其范圍為-90°~90°;軸Xb在平面OnXnYn中得出的投影夾于軸OnYn的角就是航向角φ,正向為采煤機的北偏東,范圍是0°~360°。
2 采用捷聯慣導系統的采煤機定位模型
在自動化開采當中,采煤機是至關重要的設備,要發揮采煤機的自動化優勢,需要將自動化融入刮板機、液壓支架以及采煤機,使三者配合工作,監測采煤機的位置極其重要,利用位置監測科技來對機器的工作狀態進行采集,同時對位置關系加以計算,將運行軌跡準確地預測出來,從而優化采煤機和其他設施的聯合工作,滿足斜切進刀、跟機作業以及調直等方面的作業需求,減少采煤用人數量,甚至實現無人自動化采集。采煤的時候,裝煤及落煤是采煤機的主要作用,換句話說,就是利用滾筒截割煤壁來實現把煤放到刮板輸送機上,再運用轉載機和輸送機把煤送出。然后采煤機進入割煤的環節,隨著采煤機位置的變化,液壓支架隨時移動刮板運輸機的位置。再進行到一刀割煤之后,接著要采用斜切進刀。端部斜切進刀、中部斜切進刀是當前常用的進刀方法。前者指的是在進刀時從端部進入,按照一定的截深長度實施斜切至煤壁,接著按照工作面的路線繼續前進,等到全部進入之后割出三角煤,之后再進行這一截割步驟。
在進行作業時,工作面的移動方向和刮板機的移動方向會使采煤機的位置發生變化,也會因為煤層的高度而發生變化,當煤層的走向、工作面傾斜角度以及斜切時進刀的變化都會引起采煤機的姿態和位置發生改變。通過觀察采煤機在運動時的變化情況可以得知,三維位置和三維姿態的變化表現在采煤機的工作過程中。想要完善個部分的自動化協作配合,就需要對采煤機的姿態以及位置加以精準測量。此時就需要運用捷聯慣導系統發揮作用,將其安裝在機器上,準確、實時得出加速度信息依靠的是加速度計,而獲取機器實時的姿態數據依靠的是陀螺儀,想要對采煤機的動態位置進行預測和計算,就必須運用上述兩者的功能來獲取信息(圖1)。

圖1 煤礦綜采工作面“三機”工作示意Fig.1 Working diagram of "three machines" in fully-mechanized coal mining face
3 采用捷聯慣導系統的采煤機定位方法
3.1 捷聯慣導系統坐標系建立
此系統要計算出位置姿態等方面的信息就必須通過數學計算的方法,轉換需要在坐標軸中實現。其坐標的圓心是機器的重心,按照東北天方向進行導航坐標系的建立;機器的質心作為中心,軸xb是機器前進的方向,從平面俯視和該軸垂直的是軸yb,軸zb在和平面垂直方向,由此實現坐標系的建立,具體坐標系如圖2所示。
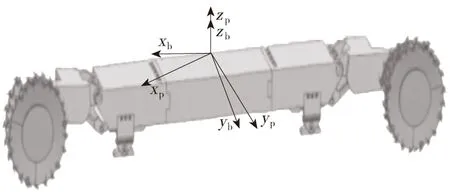
圖2 采煤機捷聯慣導系統坐標系Fig.2 Coordinate system of shearer strapdown inertial navigation system
3.2 位姿解算
為了能讓位置數據處于機身、導航坐標系兩者當中變化,需要用到的是姿態矩陣,從而使測量的數據值變為實際數值。所以說,需要運用捷聯慣導系統來對位置姿態進行解算。解算該矩陣常用的方法是:四元數法和歐拉角法。兩者相比較來說,歐拉角法能直接的結算出航向角、橫滾角以及俯仰角,同時用到的算式不多。故而,本文對姿態矩陣的結算采用歐拉角法。設γ是采煤機的俯仰角,θ是采煤機的橫滾角,ψ是航向角,運用歐拉角法對矩陣進行解算的方程是

采煤機坐標系當中的各軸角速度由ωx,ωy,ωz來表示。對各個方向的加速度做二次積分,就能將機器在此方向固定時間內的前進路程計算出來。由此獲知了姿態角和距離,就能得出機器的移動位置和姿態,進而做出定位。
4 采煤機姿態調整方法
4.1 采煤機姿態確定
采煤機斜的角度、滾筒高以及搖臂運動時候的角度是采煤機姿態的表現。當利用節聯慣導系統獲取采煤機具體定位的同時,也能夠獲取其傾角的數據。在機器搖臂上安裝傳感器,就能夠獲知搖臂的角度。對滾筒高度進行控制對截割環節有著極其重要的作用,底板角度不同,將滾輪調至適當的高度,由此才能實現截割的正常操作。
4.2 采煤機截割高度調整方法
當采煤機在進行割煤作業時,每一刀的形狀都會發生細微的不同,這就需要機器實時性獲知縱向、橫向的切角,才能做到對割煤高度做出及時調整。利用傳感器測量出機器的橫滾角和俯仰角,根據搖臂角度和機身的角度形成的關系來計算得出機器的傾角和截割之間的具體關系,從而才能做到實時性調節。
5 結論
研究煤礦當前存在煤層賦存較差的問題,使得該煤礦在初期的規模不大。在市場不斷發展以及開采設施逐漸完善的環境下,礦井開采將會是主流趨勢。因此,要不斷的進行技術手段升級。在技術升級過程中,需要具有科學性的規劃做基礎,從而避免資金成本等方面的浪費。將烏海的能源優勢和捷聯慣導技術相結合,使采煤能夠更精準、更高效。
首先,本文針對煤礦井下采煤機定位環境惡劣、空間封閉以及干擾較多的問題,提出了一種在采煤機上直接固聯捷聯慣性導航系統的采煤機定位定姿方法。其次,本文圍繞著將捷聯慣導技術運用于采煤機的定位和開采中,通過該系統發揮優勢來獲得采煤機的位置以及運動數據,并通過歐拉角法計算求解數據,尋找到對采煤機位置和姿態的解算以及實時化定位,同時對采煤機的截割高度進行分析,將該系統與機器姿態的調節方法加以闡述。在采煤機運行過程中,捷聯慣導定位系統能夠實時的對采煤機的姿態和運動軌跡進行跟蹤,提高采煤機位置定位精度,滿足煤礦井下采煤機定位要求,同時驗證了捷聯慣導對于煤礦井下采煤機定位的適用性。但是,本文也存在一定的不足之處,由于采煤機惡劣的工作環境和復雜的干擾,再加上捷聯慣導本身存在的加速度累積誤差對系統的定位精度影響很大,故下一步研究內容主要是開展采煤機捷聯慣導的振動誤差補償和利用外部定位技術進行數據融合方面的研究。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
防爆電機(2022年1期)2022-02-16 01:14:06
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
家庭影院技術(2017年9期)2017-09-26 03:41:45
工業設計(2016年4期)2016-05-04 04:00:23
現代企業(2015年8期)2015-02-28 18:55:34
現代企業(2015年6期)2015-02-28 18:51:50
河南科技(2014年18期)2014-02-27 14:14:58
河南科技(2014年8期)2014-02-27 14:07:41
