
基于RobotStudio的木窗生產線仿真設計*
2021-08-27 07:35:46郝建豹林令暉祝嘉林陳斯根黃世光
機電工程技術 2021年7期
關鍵詞:信號
郝建豹,林令暉,祝嘉林,陳斯根,黃世光
(廣東交通職業技術學院工業機器人系,廣州 510800)
0 引言
以機器人為主體的智能制造,體現了制造業的智能化、數字化和網絡化的發展要求,各行各業中大規模應用機器人正成為一種趨勢[1-2]。目前,標準產品批量生產模式已經不能適應國內個性化及結構多元化的市場需求,“個性化定制、柔性化生產”己成為門窗等家居產業轉型升級和未來發展的方向[3-4]。
李偉光等[5]研究了3種典型木門門扇自動化柔性生產線的布置方案,但沒有深入探討可行性。趙晏林[6]研究了多品種小批量環境下的家具混流生產線平衡分析與改善;錢文婷等[7]研究了家具自動倉儲系統,深入研究了單個工作站,但目前的發展趨勢是以多機器人為主體的智能制造生產線。木門窗等家具生產加工采用智能化生產線,有助于實現由手工制作、多人工參與的機械化生產、產品單一性向無人化、智能化、規模定制、高經濟效益、綠色環保等綜合發展,有助于使企業早日實現面向未來的智能制造,增強企業的競爭力,推動木門窗等家具制造業的轉型升級。
本文應用SolidWorks 和RobotStudio 軟件設計一條集鋸切、刨削、裝配、檢測、上色及自動倉儲于一體的定制木窗智能化仿真生產線,并借助虛擬現實技術,在虛擬環境中對智能制造生產線中的工業機器人運動軌跡等工作站設備以及生產過程、生產效率、生產節拍等進行仿真模擬。模擬生產可以以更加經濟、有效的方式驗證生產線各設備的配置情況,用來指導木門窗生產線的設計與升級,降低實體生產線的投資風險。本研究對家具制造業的轉型升級具有一定的借鑒意義。
1 生產線仿真系統構建
按照設計的現場實際情況確定各工作站形狀尺寸和位置關系等,利用三維仿真軟件SolidWorks 設計好木材切割機、銑削中心、上色工作站、立體倉庫等工作站的仿真模型,進而在RobotStudio 中完成整條生產線的布局與仿真調試等后續工作。仿真生產線設計流程如圖1所示。
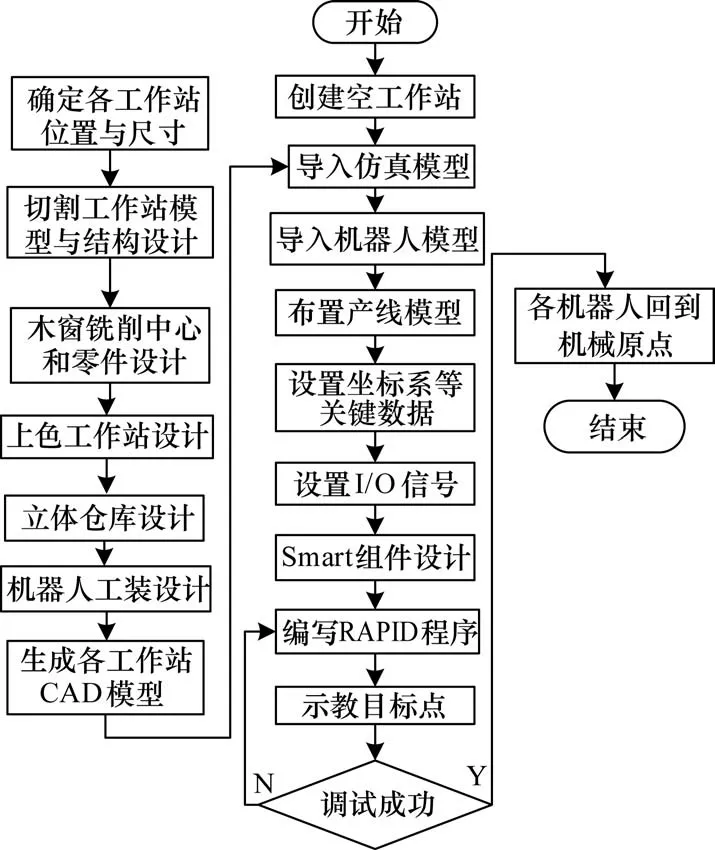
圖1 木窗仿真生產線構建流程
在RobotStudio 中構建的木窗智能制造生產線仿真系統包含了木板切割工作站、木窗邊框切割工作站、圖案銑削中心,裝配視覺檢測工作站、上色工作站、成品木窗立體倉儲工作站、木屑收集裝置及其他外圍設備組成等,生產線仿真系統鳥瞰圖如圖2所示。各工作站上下料機器人及上色工作站的噴涂機器人都選用ABB公司的IRB4600型號。
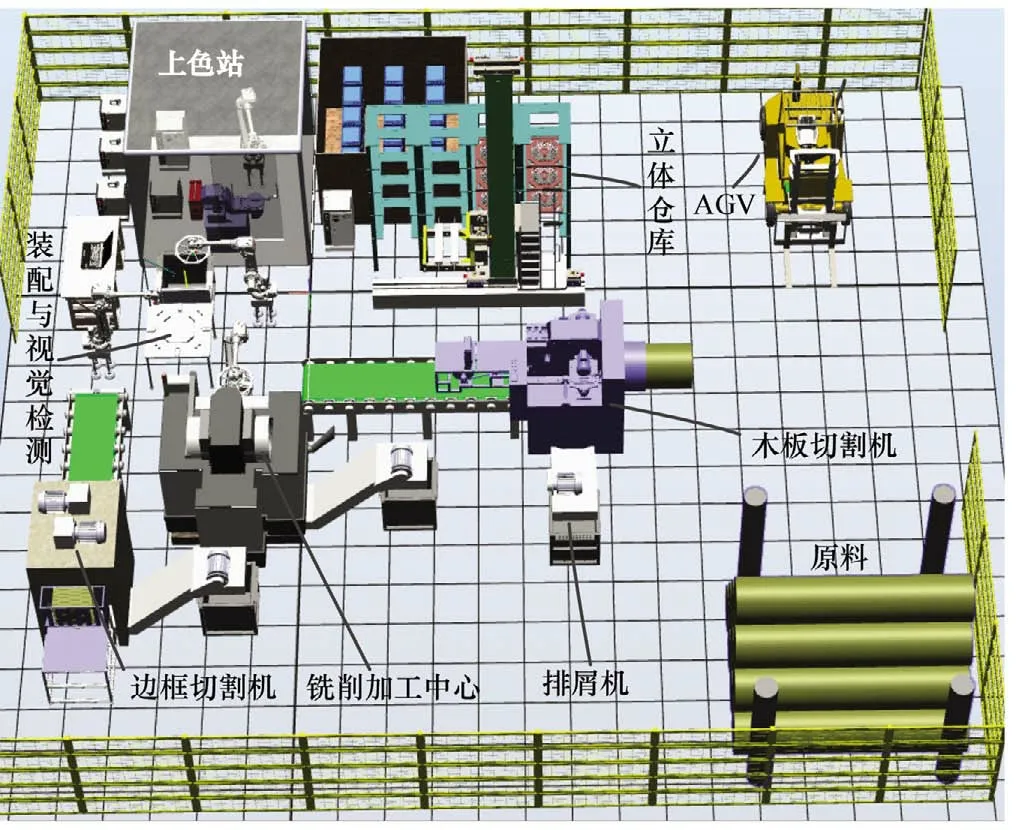
圖2 仿真生產線鳥瞰圖
2 機器人手部設計與標定
結合木窗生產工藝特點,上下料工作站采用了ABB 搬運機器人IRB4600 來進行上下料,設計了機器人的夾持手部,用來夾取木窗邊框放置到裝配臺上。由于木窗面積較大,表面光滑,易夾傷加工好的木窗,采用吸盤作為抓取木窗的執行手部,如圖3所示。
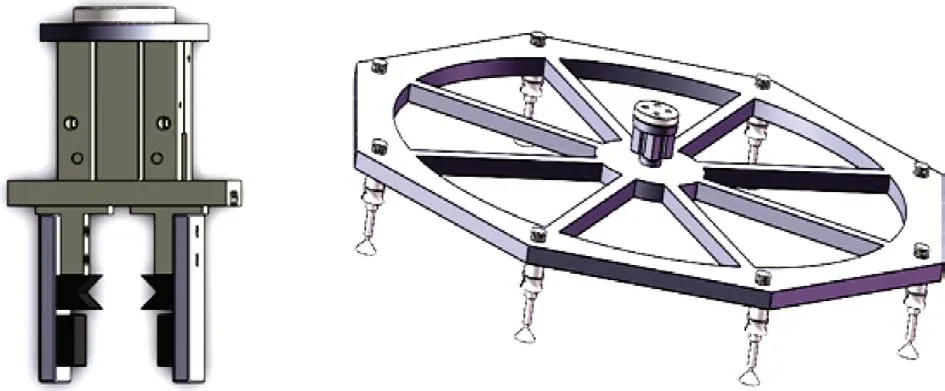
圖3 邊框夾持及木窗吸取手部
機器人手部坐標系標定有助于機器人碰撞檢測與軌跡跟蹤,手部標定常用的方法有旋轉矩陣法、四元數法和歐拉角法等[8-9],本文用四元數法,手部坐標系方向的方位數據為[q1,q2,q3,q4],其4 個數值表示旋轉坐標帶符號常數的四元數,且滿足。其中:
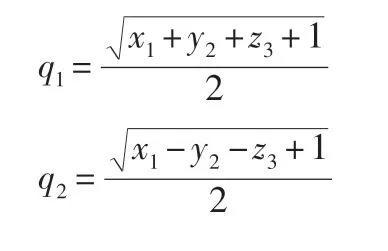
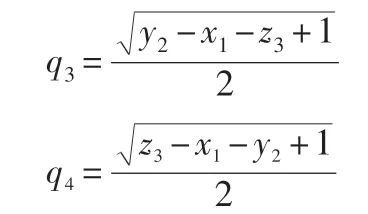
式中:(x1,x2,x3)、(y1,y2,y3)、(z1,z2,z3)分別為定義手部坐標系單位向量在手腕基準坐標系3個軸上的投影。
以邊框夾持手部坐標系標定為例,標定前僅含有機器人手腕基準坐標系,定義手部坐標系ToolFrame,方向參考手腕基準坐標系,按照四元數法,則可確定ToolFrame手部姿態方位數據為[1,0,0,0]。定義機器人手部TCP位于手腕坐標系的(0,0,180)位置,夾持手部質量為1 kg,重心位于手腕基準坐標系的(0,0,165)位置,則如圖4所示的機器人手部坐標系為:

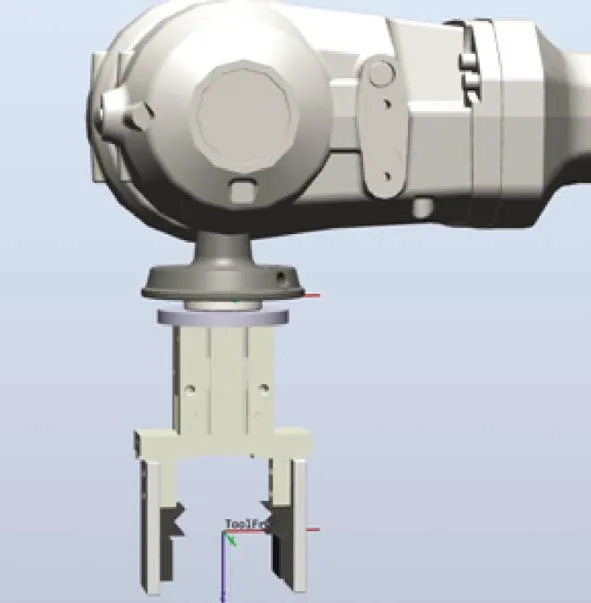
圖4 機器人手部坐標系標定
3 系統組件設計與編程
3.1 動態組件設計
實際的智能化生產線,以PLC為中央控制中心,以Ether?net、Profinet 等為通訊接口,將PLC 與工業機器人、切割設備、銑削加工中心等設備連接,接收并處理工業機器人、輸送線、銑削加工中心等其他設備傳送來的信號。仿真時,利用RobotStudio 中Smart 組件來模擬實際PLC,所以Smart 組件的構建是實現各工作站動畫效果的關鍵。以銑削加工中心Smart組件為例說明構建過程,首先創建一個銑削數控機床機械裝置,建立機床門的開門關門的運動姿態,通過事件管理器建立一個輸入I/O信號作為機器人輸出信號關聯,當機器人輸出置位/復位doKaiMen信號給事件管理器時,對應執行銑削數控機床執行上下料的開門/關門,然后再建立Smart組件的I/O輸入輸出信號與機器人的I/O輸入輸出信號關聯,當輸送鏈Smart 組件輸出doDaoliao 信號發送給機器人輸入diDaoliao 信號,讓去機器人執行拾取物料,機器人輸出一個doGrip 信號給吸盤Smart組件輸入信號diGrip吸緊物料,拾取物料后,機器人輸出doKaiMen信號給銑床開門,把物料放好在銑床工作臺后,機器人復位doKaiMen信號給銑床關門,機器人再根據要求銑削出規定的木窗紋案,并分別輸出doSource/doSource_1/doSource_2 信號給銑床Smart 組件輸入信號diSource/diS?ource_1/dSource_2,讓銑床執行不同程序銑削紋案;當銑削完成后,銑床Smart 組件輸出一個doSourceOK 信號給機器人輸入信號diSourceOK,讓機器人進去拾取銑削好紋案的木窗。整個銑削加工中心工作站Smart 動態組件邏輯關系如圖5 所示。

圖5 Smart動態組件邏輯關系
3.2 機器人程序編制
本文設計的定制木窗智能制造生產線通過4 臺機器人系統相互協調工作的方式完成,具體為銑削加工中心搬運機器人、裝配視覺檢測工作站機器人、邊框下料機器人系統及上色機器人系統。以銑削加工中心搬運機器人為例,在定義工具坐標、工件坐標、I/O 信號,Smart 組件等完成后,就可以在應用模塊編寫工作站main 主程序、Pick_1 上料例行程序、Drop_1下料例行程序、Pick_2轉換二次上料例行程序、Drop_2完成下料例行程序、Init 初始化例行程序等,部分例行程序及邏輯關系如下:
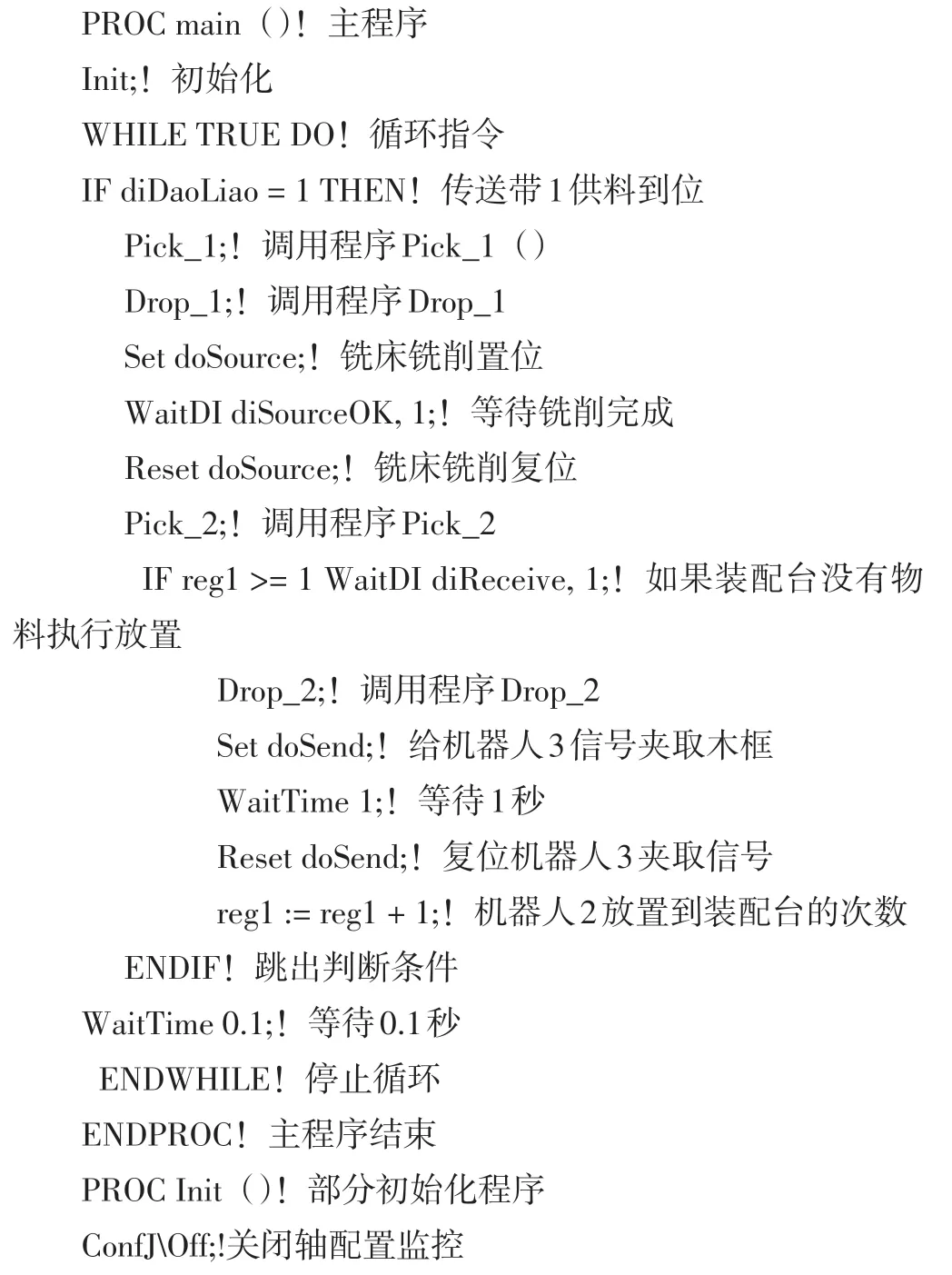
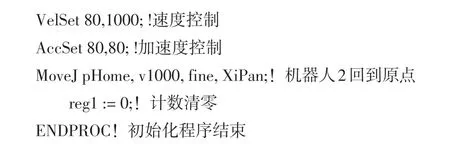
在每個機器人系統包括主程序在內的各個例行程序都在應用模塊內完成,主程序調用初始化例行程序及各運動例行程序,實現機器人、銑削加工中心及外圍設備各種動作。初始化程序用來初始化機器人位置、姿態,設定機器人最大運行速度,設置加速度以及工作站各相關設備復位。各運動例行程序在WHILE 循環語句內完成,因各運動程序通過傳感器由IF 條件語句完成,為避免機器人控制器CPU 過載,設定循環等待時間為0.1 s。機器人程序可在示教器或RAPID 中完成,仿真調試完成后,可下載到實體機器人控制器中。
4 機器人TCP軌跡優化仿真
定制木窗智能制造生產線中,木窗的品質(加工質量、表面光潔度)主要由木窗的加工條件(切割機、加工中心、裝配定位、上色機器人工藝等)決定。在不影響木窗品質的前提下,本文利用RobotStudio 的仿真功能,在仿真模型中多次模擬木窗生產過程,發現生產線節拍最大的影響因素為各工作站上下料機器人的運動指令,改變指令參數可改變節拍。為提高生產效率,最大程度地減小銑削加工中心等各工作站等待時間,仿真分析時,采用機器人的運動指令為MoveJ Offs(pPick,0,0,800),v1 000,fine,ToolFrame。設定機器人TCP 軌跡追蹤后,其邊框上下料機器人在機床卡盤放料TCP運行軌跡如圖6(a)所示。若把參數fine修改為轉彎半徑z150,其速TCP運行軌跡如圖6(b)所示。
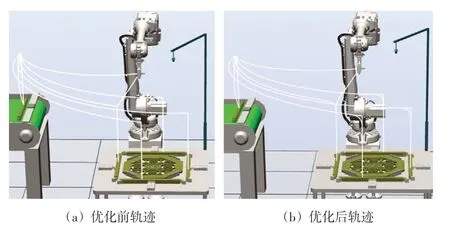
圖6 TCP運行軌跡
從圖6(b)可看出,機器人TCP 運行軌跡在轉彎處更平順,機器人動作也更柔順,實際運行中機器人沒有暫停和急加速現象,這也有助于機器人電機和減速器的保護。裝配臺上方有3處看似是急轉彎處,實際為機器人放下邊框后上升到轉彎處等待切割工作站輸送帶邊框到位,而沒有命令機器人回到pHome 點等待,也是便于提高效率。通過這種方式可以對生產線所有機器人TCP 運行軌跡優化。根據仿真情況,不但可以優化TCP 運行軌跡,還可優化機器人速度、機器人位置與姿態等,這對以后的木窗等家具的實際生產線的調試具有非常重要的指導意義。
5 結束語
隨著當前加工、制造業的轉型升級,以多機器人為主體的智能制造生產線在家具制造業將會大量應用。本文基于SolidWorks與RobotStudio建立了智能制造生產線仿真模型,并實現了機器人的編程和整線仿真調試。在不更換任何硬件設備的前提下,根據加工的要求,可模擬生產多種木窗產品。針對實體生產線在設計與調試中存在的問題如軌跡優化、生產效率提高等,利用虛擬仿真技術做了探討,可為工程的實施提供理論依據和試驗平臺。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06
