永磁同步電機(jī)三矢量?jī)?yōu)化預(yù)測(cè)磁鏈控制
2021-08-28 02:09:10葛興來(lái)胡曉孫偉鑫李松濤
電機(jī)與控制學(xué)報(bào) 2021年8期
關(guān)鍵詞:優(yōu)化實(shí)驗(yàn)
葛興來(lái),胡曉,孫偉鑫,李松濤
(西南交通大學(xué) 磁浮技術(shù)與磁浮列車教育部重點(diǎn)實(shí)驗(yàn)室,成都 611756)
0 引 言
模型預(yù)測(cè)控制(model predictive control,MPC)因其易于合并多變量約束條件和出色的控制性能等特點(diǎn)在學(xué)術(shù)界和工業(yè)界均受到了廣泛關(guān)注[1],目前已被廣泛應(yīng)用于功率變換器[2]、風(fēng)能轉(zhuǎn)換系統(tǒng)[3-4]和電機(jī)[5-12]等領(lǐng)域。
通常MPC可分為有限控制集模型預(yù)測(cè)(finite-control-set MPC,FCS-MPC)和連續(xù)控制集模型預(yù)測(cè)(continuous-control-set MPC,CCS-MPC)。CCS-MPC可選擇滿足逆變器輸出矢量合成范圍內(nèi)的所有可能開關(guān)動(dòng)作,并通過(guò)SVPWM調(diào)制器合成輸出,因此存在著單個(gè)控制周期內(nèi)計(jì)算量沉重的問(wèn)題,難以在實(shí)際工況中實(shí)現(xiàn)。FCS-MPC在一個(gè)控制周期內(nèi)遍歷所有基礎(chǔ)電壓矢量,選擇使價(jià)值函數(shù)值最小的一組作為最佳電壓矢量輸出。整個(gè)系統(tǒng)無(wú)需調(diào)制器,且其可能的開關(guān)動(dòng)作(切換狀態(tài))是有限的,因而實(shí)現(xiàn)更為簡(jiǎn)單[13]。同時(shí),MPC又可根據(jù)單個(gè)控制周期內(nèi)參與控制的電壓矢量個(gè)數(shù)的不同分為單矢量MPC、雙矢量MPC和三矢量MPC。單矢量MPC中,逆變器只能輸出幅值和方向固定的8個(gè)基礎(chǔ)電壓矢量,因此其控制變量的輸出脈動(dòng)較大,穩(wěn)態(tài)性能較差。為了解決以上缺陷,一般可通過(guò)擴(kuò)大電壓矢量選擇范圍進(jìn)行改進(jìn)。雙矢量MPC中在一個(gè)控制周期內(nèi)可輸出兩個(gè)有效電壓矢量或一個(gè)有效電壓矢量和一個(gè)零矢量的組合,文獻(xiàn)[14]和文獻(xiàn)[15]分別就以上兩種組合方式提出了不同的雙矢量MPC控制策略,但因第二個(gè)有效矢量的選擇范圍有限,在輸出脈動(dòng)上雖較單矢量MPC有所改善,但改善程度有限。文獻(xiàn)[16]提出了一種廣義雙矢量策略,相較于文獻(xiàn)[14]和文獻(xiàn)[15]中所提方法,改善了系統(tǒng)的性能,但計(jì)算量繁雜。三矢量MPC中,通常采用兩個(gè)有效電壓矢量和一個(gè)零矢量的組合,達(dá)到輸出電壓幅值與相位均可調(diào)的目的,且整個(gè)系統(tǒng)開關(guān)頻率固定,穩(wěn)態(tài)性能良好。文獻(xiàn)[17]通過(guò)查表法獲得系統(tǒng)下一控制周期輸出的電壓序列,但其無(wú)法保證所選序列為全局最優(yōu),文獻(xiàn)[18]將相鄰電壓矢量和零矢量進(jìn)行分組,但其輸出電壓矢量覆蓋范圍有限。文獻(xiàn)[19]和文獻(xiàn)[20]提出了基于預(yù)測(cè)電流和轉(zhuǎn)矩控制的三矢量MPC,提高了系統(tǒng)的穩(wěn)態(tài)性能,但在對(duì)電壓矢量進(jìn)行選擇時(shí)均未解決每個(gè)控制周期計(jì)算量較大這一缺陷。
在電機(jī)控制領(lǐng)域,根據(jù)價(jià)值函數(shù)中控制變量的不同,用于永磁同步電機(jī)(permanent magnet synchronous motor,PMSM)的MPC可分為模型預(yù)測(cè)電流控制(model predictive current control,MPCC),模型預(yù)測(cè)轉(zhuǎn)矩控制(model predictive torque control,MPTC)和模型預(yù)測(cè)磁鏈控制(model predictive flux-linkage control,MPFC)。MPCC主要針對(duì)dq軸電流變化,以使dq軸電流誤差最小的電壓矢量作為其最佳電壓矢量輸出,盡管其在實(shí)際應(yīng)用時(shí)易于實(shí)現(xiàn),但在狀態(tài)切換時(shí)轉(zhuǎn)矩脈動(dòng)較大。MPTC將電機(jī)的轉(zhuǎn)矩和磁鏈誤差視為控制變量,還可以通過(guò)控制多個(gè)目標(biāo)來(lái)降低開關(guān)頻率[21]。與MPCC相比,MPTC在狀態(tài)切換時(shí)控制變量過(guò)沖較小,但由于磁鏈和轉(zhuǎn)矩的量綱不同,往往需要在價(jià)值函數(shù)中加入權(quán)重系數(shù)。權(quán)重系數(shù)的選取主要取決于經(jīng)驗(yàn)方法,但由于指導(dǎo)權(quán)重系數(shù)的設(shè)計(jì)與調(diào)整的方法很少,增加了MPTC的復(fù)雜性。文獻(xiàn)[22]在矩陣變換器的預(yù)測(cè)控制中引入模糊邏輯來(lái)實(shí)時(shí)調(diào)整權(quán)重系數(shù),文獻(xiàn)[23]在轉(zhuǎn)矩和磁鏈方面分別采用兩個(gè)價(jià)值函數(shù)來(lái)避免權(quán)重系數(shù)的存在,但該方法增加系統(tǒng)的計(jì)算量。對(duì)于MPFC,價(jià)值函數(shù)僅將磁鏈作為控制變量,這意味著不再需要權(quán)重系數(shù),同時(shí)還可實(shí)現(xiàn)與MPTC相當(dāng)?shù)目刂菩阅堋N墨I(xiàn)[24]和文獻(xiàn)[25]提出了針對(duì)不同電機(jī)的預(yù)測(cè)磁鏈控制方法,但只完成了將磁鏈作為控制變量進(jìn)行基礎(chǔ)預(yù)測(cè)控制。雖然MPFC存在諸如繁重的計(jì)算量、磁鏈值無(wú)法保持恒定等問(wèn)題,但仍然是未來(lái)電機(jī)控制的發(fā)展趨勢(shì)。
基于上述分析,本文提出了一種基于矢量快速選擇的永磁同步電機(jī)三矢量預(yù)測(cè)磁鏈控制。第一節(jié)首先給出永磁電機(jī)的模型,并介紹傳統(tǒng)的模型預(yù)測(cè)控制方法。在此基礎(chǔ)上,第二節(jié)首先對(duì)矢量扇區(qū)進(jìn)行重新劃分。在該步驟中,根據(jù)磁鏈無(wú)差拍預(yù)測(cè)控制原理計(jì)算下一周期預(yù)施加的參考電壓矢量,從而將價(jià)值函數(shù)中對(duì)磁鏈誤差的跟蹤轉(zhuǎn)化為對(duì)電壓誤差的跟蹤,減少每個(gè)控制周期的預(yù)測(cè)次數(shù)。隨后詳細(xì)介紹了三矢量?jī)?yōu)化預(yù)測(cè)磁鏈控制,其中,推導(dǎo)磁鏈與基礎(chǔ)電壓矢量的關(guān)系,根據(jù)新劃分的矢量扇區(qū)對(duì)第一個(gè)最佳電壓矢量進(jìn)行快速選擇,并將其作用結(jié)果與無(wú)差拍原理計(jì)算所得的磁鏈參考值進(jìn)行比較,兩者的差值作為第二個(gè)最佳電壓矢量選擇的標(biāo)準(zhǔn)。兩個(gè)有效矢量和一個(gè)零矢量的作用時(shí)間根據(jù)無(wú)差拍控制原理計(jì)算得出。第三節(jié)利用仿真和實(shí)驗(yàn)測(cè)試對(duì)所研究的模型預(yù)測(cè)控制方法進(jìn)行驗(yàn)證,并與傳統(tǒng)預(yù)測(cè)磁鏈控制進(jìn)行對(duì)比。最后,在第四節(jié)中對(duì)全文進(jìn)行總結(jié),得出結(jié)論。
1 傳統(tǒng)預(yù)測(cè)磁鏈控制
1.1 PMSM數(shù)學(xué)模型
以表貼式永磁同步電機(jī)為例,其在同步旋轉(zhuǎn)坐標(biāo)系下的電流狀態(tài)方程和磁鏈方程為:
pis=Ais+Bus-C;
(1)
ψs=B-1is+D。
(2)

對(duì)于PMSM來(lái)說(shuō),通常永磁磁鏈值已知,則磁鏈參考值和轉(zhuǎn)矩參考值滿足以下方程[24]:
(3)
式中:np為電機(jī)極對(duì)數(shù);|ψs_ref|為定子磁鏈參考值;θsf為定子磁鏈參考值與永磁磁鏈之間的夾角,即電機(jī)理想負(fù)載角。當(dāng)控制定子直軸電流isd=0時(shí),定子磁鏈參考值與理想負(fù)載角可表達(dá)如下:
(4)
(5)
定子磁鏈參考矢量角度為
∠ψs_ref=∠ψf+θsf。
(6)
結(jié)合式(4)~式(6),定子磁鏈參考矢量可表達(dá)為
ψs_ref=|ψs_ref|ej∠ψs_ref。
(7)
1.2 PMSM預(yù)測(cè)磁鏈控制
定子磁鏈與定子電流之間滿足關(guān)系式:
(8)
對(duì)式(8)采用一階歐拉離散化,可得下一時(shí)刻磁鏈預(yù)測(cè)表達(dá)式:
(9)
定子磁鏈參考值在d、q軸上的分量為:
(10)
PMSM的傳統(tǒng)預(yù)測(cè)磁鏈控制以磁鏈作為控制變量,逆變器的8個(gè)基礎(chǔ)電壓矢量代入式(9)后可得到對(duì)應(yīng)的8組磁鏈預(yù)測(cè)值,依次代入價(jià)值函數(shù)中并輸出使價(jià)值函數(shù)最小的磁鏈預(yù)測(cè)值所對(duì)應(yīng)的基礎(chǔ)電壓矢量,其控制框圖如圖1所示。磁鏈預(yù)測(cè)控制價(jià)值函數(shù)為
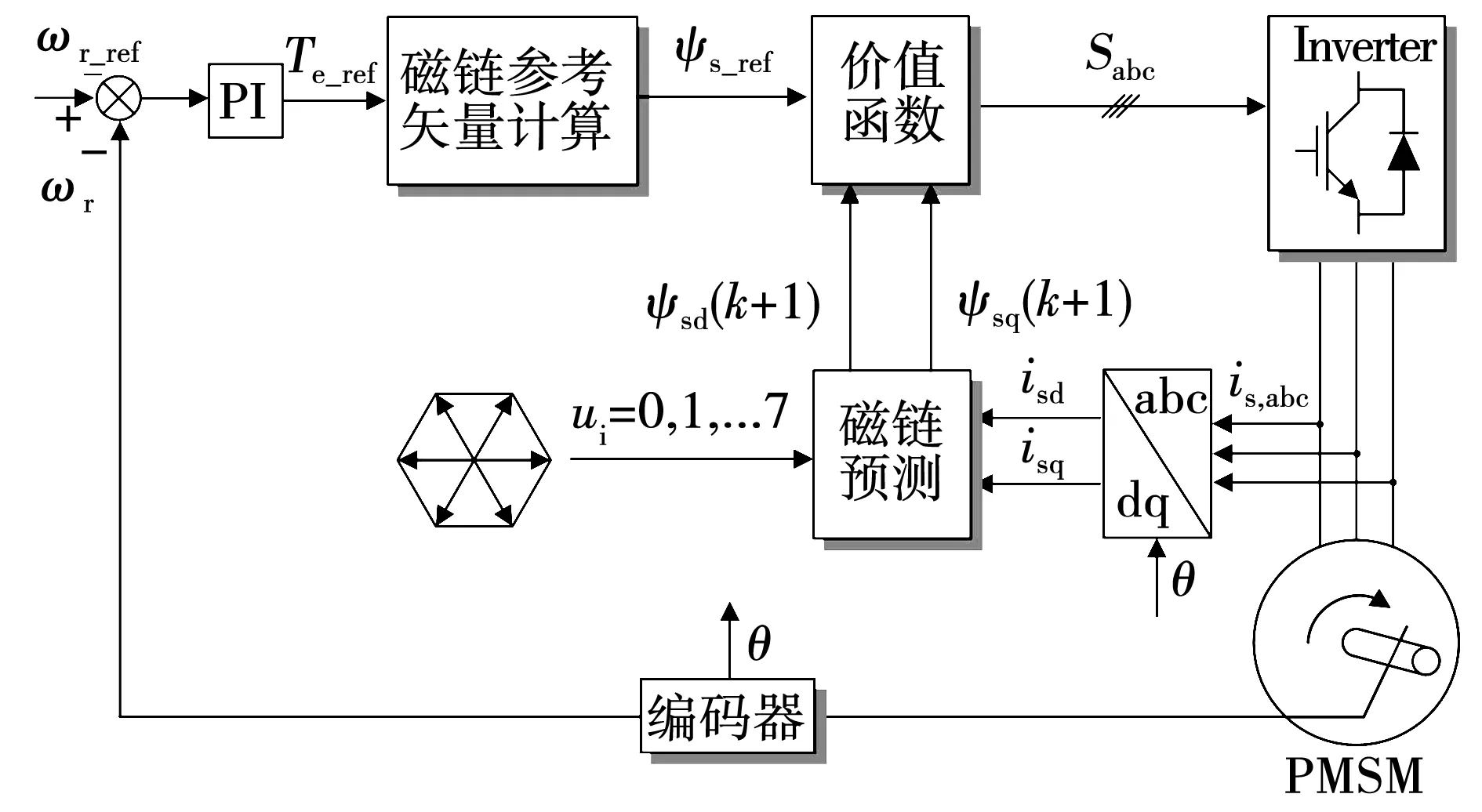
圖1 傳統(tǒng)預(yù)測(cè)磁鏈控制框圖Fig.1 Block diagram of the conventional model predictive flux-linkage control
g=|ψsd_ref-ψsd(k+1)|+|ψsq_ref-ψsq(k+1)|。
(11)
2 三矢量?jī)?yōu)化預(yù)測(cè)磁鏈控制
2.1 優(yōu)化矢量扇區(qū)劃分
傳統(tǒng)預(yù)測(cè)磁鏈控制在單個(gè)控制周期內(nèi)需遍歷所有基礎(chǔ)電壓矢量,即需預(yù)測(cè)8次并對(duì)價(jià)值函數(shù)進(jìn)行8次對(duì)應(yīng)計(jì)算,經(jīng)比較后再輸出最佳電壓矢量,其計(jì)算量較大,在實(shí)際應(yīng)用時(shí)性能往往受到一定限制。將矢量扇區(qū)進(jìn)行重新劃分,根據(jù)磁鏈無(wú)差拍預(yù)測(cè)控制原理計(jì)算下一周期預(yù)施加的參考電壓矢量,從而將價(jià)值函數(shù)中對(duì)磁鏈誤差的跟蹤轉(zhuǎn)化為對(duì)電壓誤差的跟蹤,根據(jù)相位判斷參考電壓矢量所在扇區(qū)后與相鄰基礎(chǔ)電壓矢量進(jìn)行比較,該種方法無(wú)需遍歷所有基礎(chǔ)電壓矢量,可顯著減少系統(tǒng)計(jì)算量。
對(duì)于PMSM,其定子磁鏈與定子電壓之間滿足關(guān)系式:
(12)
對(duì)式(12)采用一階歐拉離散化后可得:
(13)
其中Ts為采樣周期。
根據(jù)無(wú)差拍控制原理,令下一時(shí)刻的磁鏈達(dá)到參考值,即
(14)
可得理想電壓矢量為:
(15)
將理想電壓矢量在同步旋轉(zhuǎn)坐標(biāo)系上的分量轉(zhuǎn)化為在兩相靜止坐標(biāo)系上的分量,可得理想電壓矢量相位為
(16)
對(duì)矢量扇區(qū)進(jìn)行如表1所示的重新劃分,根據(jù)理想電壓矢量相位判斷其所在扇區(qū),可確定待選有效電壓矢量。
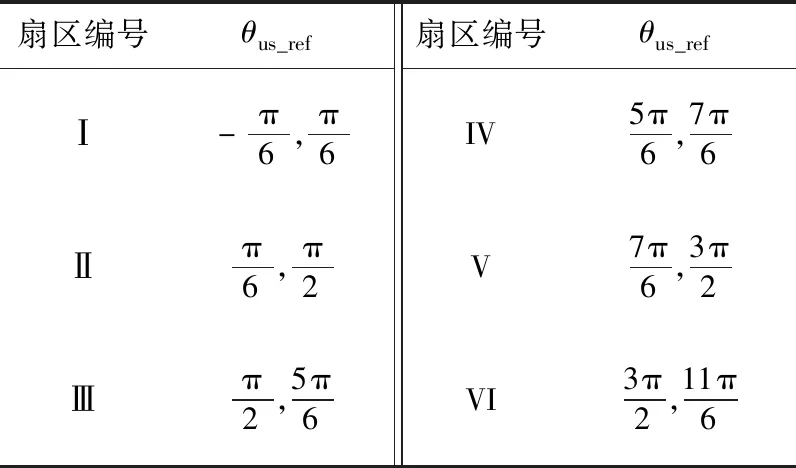
表1 新矢量扇區(qū)劃分Table 1 New vector division
將價(jià)值函數(shù)改寫成如下形式:
g=|us_ref-ui|。
(17)
將待選有效電壓矢量與零矢量分別代入式(17)中進(jìn)行計(jì)算,通過(guò)比較理想電壓矢量與所在扇區(qū)的有效電壓矢量和零矢量間的電壓誤差大小,即可判斷出下一時(shí)刻預(yù)施加的最佳電壓矢量。矢量扇區(qū)重新劃分后的控制框圖如圖2所示。
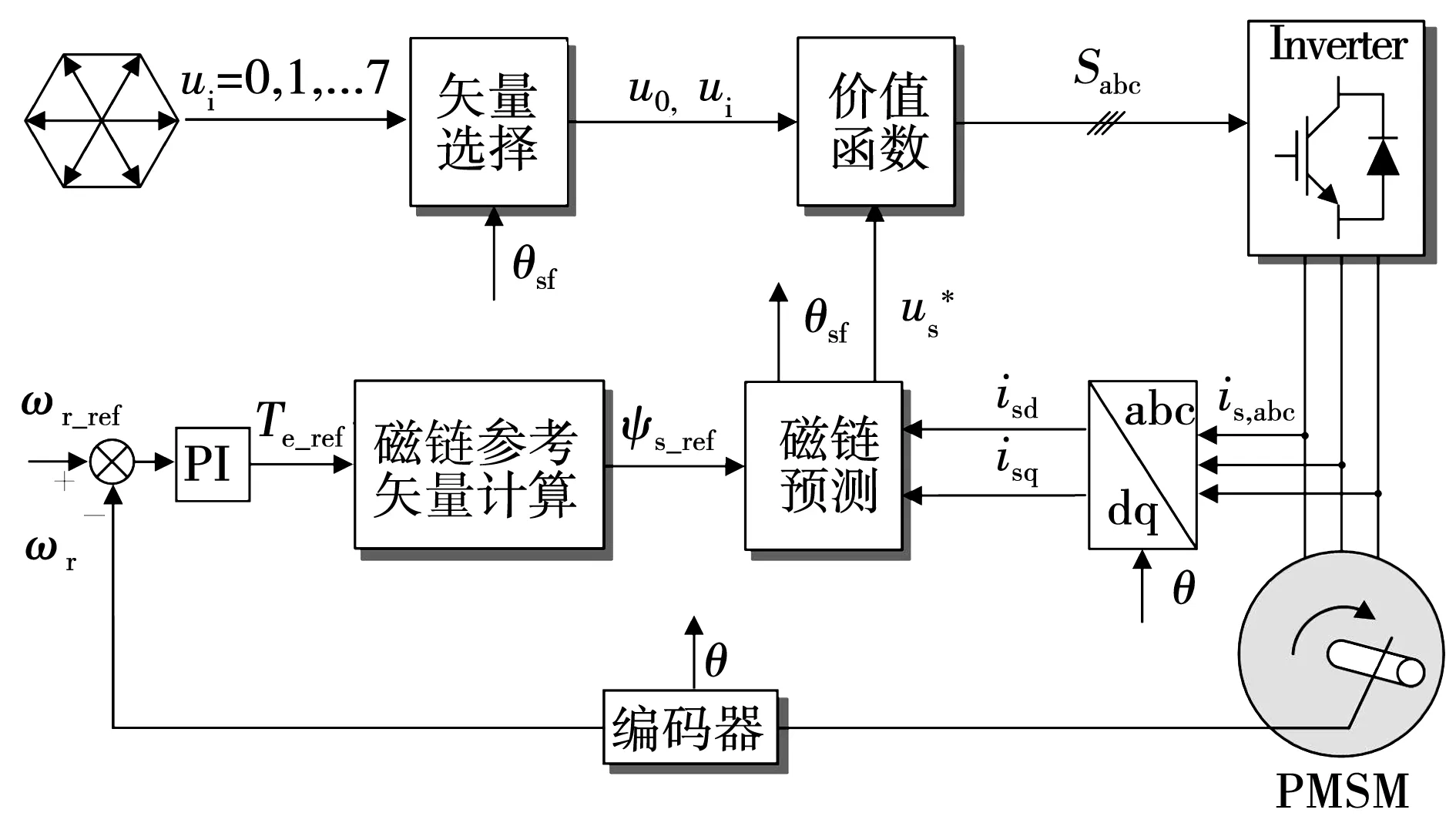
圖2 基于新矢量扇區(qū)劃分的預(yù)測(cè)磁鏈控制框圖Fig.2 Block diagram of the MPFC based on new vector division
2.2 有效電壓矢量選擇
為了解決傳統(tǒng)預(yù)測(cè)磁鏈控制由于輸出電壓矢量的幅值、相位固定所造成的在轉(zhuǎn)矩脈動(dòng)大、電流諧波較多等方面的局限性,在矢量扇區(qū)重新劃分和價(jià)值函數(shù)跟蹤電壓誤差的基礎(chǔ)上提出三矢量?jī)?yōu)化預(yù)測(cè)磁鏈控制,即在每個(gè)控制周期內(nèi)輸出兩個(gè)有效電壓矢量和一個(gè)零矢量的組合,達(dá)到輸出電壓矢量在幅值和相位上均可控制的目的。三矢量?jī)?yōu)化預(yù)測(cè)磁鏈控制框圖如圖3所示。
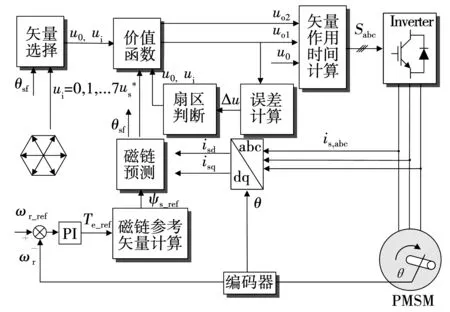
圖3 三矢量?jī)?yōu)化預(yù)測(cè)磁鏈控制Fig.3 Block diagram of the improved three-vector MPFC
首先根據(jù)優(yōu)化預(yù)測(cè)磁鏈控制確定第一個(gè)最佳電壓矢量uo1,計(jì)算該電壓矢量與理想電壓矢量間的誤差矢量Δu,然后求解誤差矢量Δu在兩相靜止坐標(biāo)系上的分量,判斷其所在扇區(qū),直接選擇第二個(gè)最佳電壓矢量uo2,其矢量選擇如表1所示。
2.3 作用時(shí)間計(jì)算
令ud_o1、uq_o1、ud_o2、uq_o2、ud0、uq0分別為第一個(gè)最佳電壓矢量uo1、第二個(gè)最佳電壓矢量uo2和零矢量在d、q坐標(biāo)軸上的分量;Sd_o1、Sq_o1、Sd_o2、Sq_o2、Sd0、Sq0分別為第一個(gè)最佳電壓矢量uo1、第二個(gè)最佳電壓矢量uo2和零矢量作用時(shí)定子磁鏈所對(duì)應(yīng)的變化率,其計(jì)算公式如下:
(18)
(19)
(20)
采用磁鏈無(wú)差拍原則計(jì)算各矢量作用時(shí)間,即下一時(shí)刻磁鏈值與磁鏈參考值相等,則滿足:
(21)
其中:t1、t2、t0分別為3個(gè)矢量作用時(shí)間,且t0=Ts-t1-t2。
聯(lián)立式(18)~式(21)可求解得出:
(22)
其中:X1=ud_o2uq_o1-uq_o2ud_o1;
X2=ψsq_ref-ψsq(k)-Sq0Ts;
X3=ψsd_ref-ψsd(k)-Sq0Ts。
對(duì)于計(jì)算所得的矢量作用時(shí)間t1、t2、t0,若其中有小于零的計(jì)算結(jié)果,則舍去相應(yīng)作用矢量,由剩余兩個(gè)矢量作用整個(gè)控制周期。若t1+t2>Ts,則按下式重新分配矢量作用時(shí)間:
(23)
3 仿真與實(shí)驗(yàn)分析
3.1 仿真分析
為了驗(yàn)證三矢量?jī)?yōu)化預(yù)測(cè)磁鏈算法的可行性,首先基于MATLAB/Simulink搭建了系統(tǒng)仿真模塊,系統(tǒng)控制頻率設(shè)置為20 kHz。其中,永磁同步電機(jī)的參數(shù)如表2所示。
表2 永磁同步電機(jī)參數(shù)Table 2 Parameters of the PMSM
仿真中,電機(jī)首先空載起動(dòng),由零轉(zhuǎn)速升至額定轉(zhuǎn)速3 000 r/min。穩(wěn)定運(yùn)行后在1s時(shí)突加負(fù)載10 N·m,隨后在2s時(shí)將負(fù)載由10 N·m減載至5 N·m運(yùn)行。測(cè)試結(jié)果如圖4和圖5所示,從上至下依次是定子三相電流波形、轉(zhuǎn)速波形和轉(zhuǎn)矩波形。
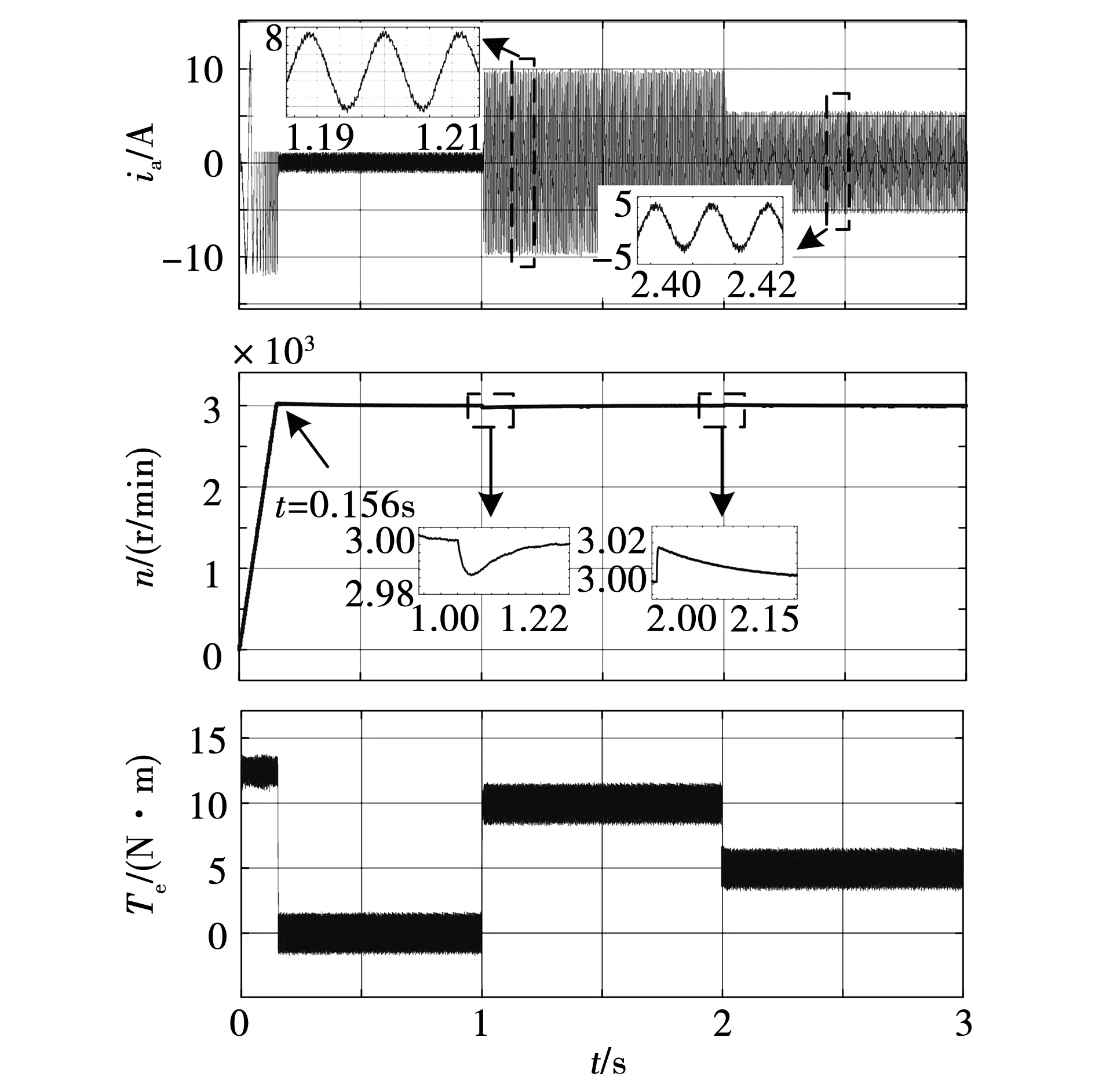
圖4 傳統(tǒng)預(yù)測(cè)磁鏈控制仿真結(jié)果Fig.4 Simulation results of the conventional MPFC method
通過(guò)圖4與圖5對(duì)比,三矢量?jī)?yōu)化預(yù)測(cè)磁鏈控制和優(yōu)化磁鏈預(yù)測(cè)達(dá)到轉(zhuǎn)速給定值的時(shí)間分別為0.155 s和0.156 s,二者控制響應(yīng)速度相當(dāng),但前者電流脈動(dòng)和轉(zhuǎn)矩脈動(dòng)明顯更小。為了進(jìn)一步對(duì)比兩種控制方法的控制性能,圖6和圖7給出了兩種控制方法在額定轉(zhuǎn)速及額定負(fù)載下的諧波分析。由圖6和圖7對(duì)比可以看出,三矢量?jī)?yōu)化預(yù)測(cè)磁鏈控制的電流諧波含量明顯小于優(yōu)化預(yù)測(cè)磁鏈控制,其穩(wěn)態(tài)性能更佳。
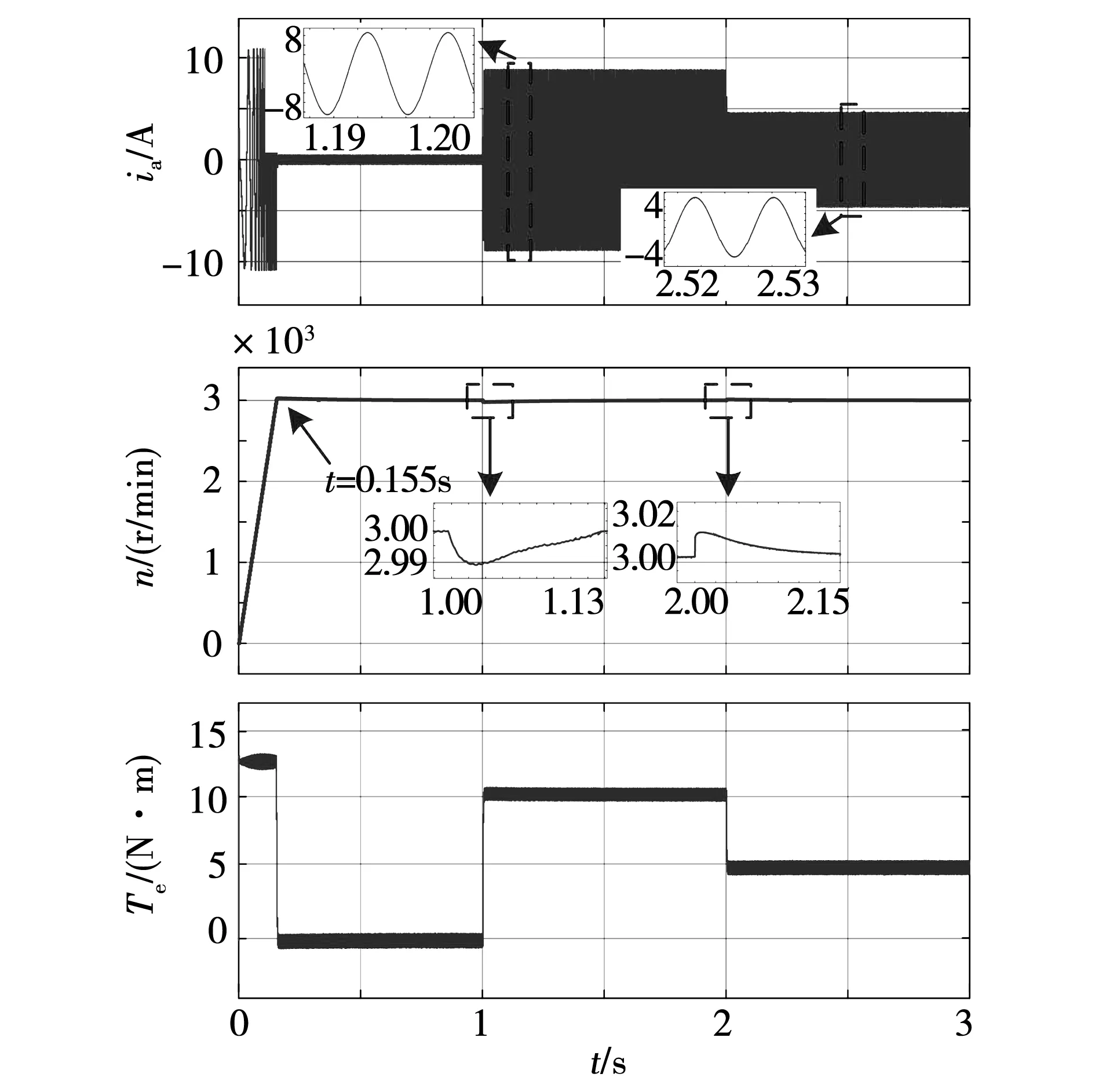
圖5 三矢量?jī)?yōu)化預(yù)測(cè)磁鏈控制仿真結(jié)果Fig.5 Simulation results of the improved three-vector MPFC
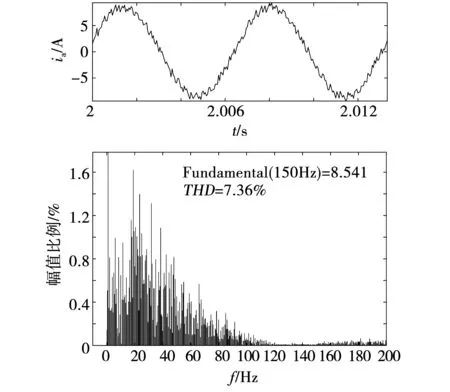
圖6 傳統(tǒng)預(yù)測(cè)磁鏈控制定子電流諧波分析Fig.6 FFT analysis of stator current based on the conventional MPFC
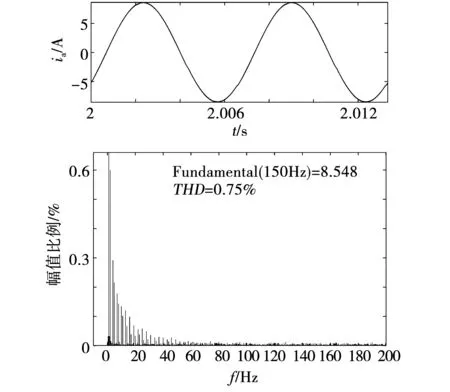
圖7 三矢量?jī)?yōu)化預(yù)測(cè)磁鏈控制定子電流諧波分析Fig.7 FFT analysis of stator current based on the improved three-vector MPFC
3.2 實(shí)驗(yàn)分析
利用基于RT-LAB實(shí)時(shí)仿真器和數(shù)字信號(hào)處理器TMS320F28335的硬件在環(huán)測(cè)試平臺(tái),如圖8所示,進(jìn)一步驗(yàn)證所提出的三矢量?jī)?yōu)化預(yù)測(cè)磁鏈控制算法。其中,被控對(duì)象基于MATLAB/Simulink建模,通過(guò)TCP/IP下載到實(shí)時(shí)仿真機(jī)中模擬真實(shí)被控逆變器-電機(jī)系統(tǒng)。永磁同步電機(jī)的參數(shù)如表2所示。
1)穩(wěn)態(tài)性能。
為了對(duì)比優(yōu)化預(yù)測(cè)磁鏈控制與三矢量?jī)?yōu)化預(yù)測(cè)磁鏈控制算法的穩(wěn)態(tài)性能,電機(jī)在額定轉(zhuǎn)速3 000 r/min和額定負(fù)載10 N·m下運(yùn)行,其實(shí)驗(yàn)波形如圖9和圖10所示,通過(guò)從示波器中截取數(shù)據(jù)分別對(duì)電流和轉(zhuǎn)矩脈動(dòng)進(jìn)行計(jì)算,兩種控制方法下的穩(wěn)態(tài)性能對(duì)比如表3所示。
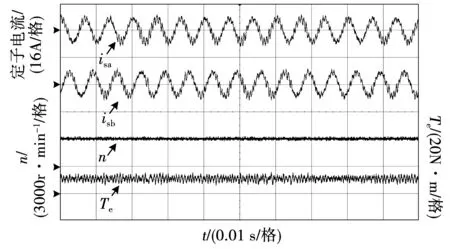
圖9 傳統(tǒng)預(yù)測(cè)磁鏈控制穩(wěn)態(tài)運(yùn)行實(shí)驗(yàn)結(jié)果Fig.9 Experimental results of the conventional MPFC under steady-state operation
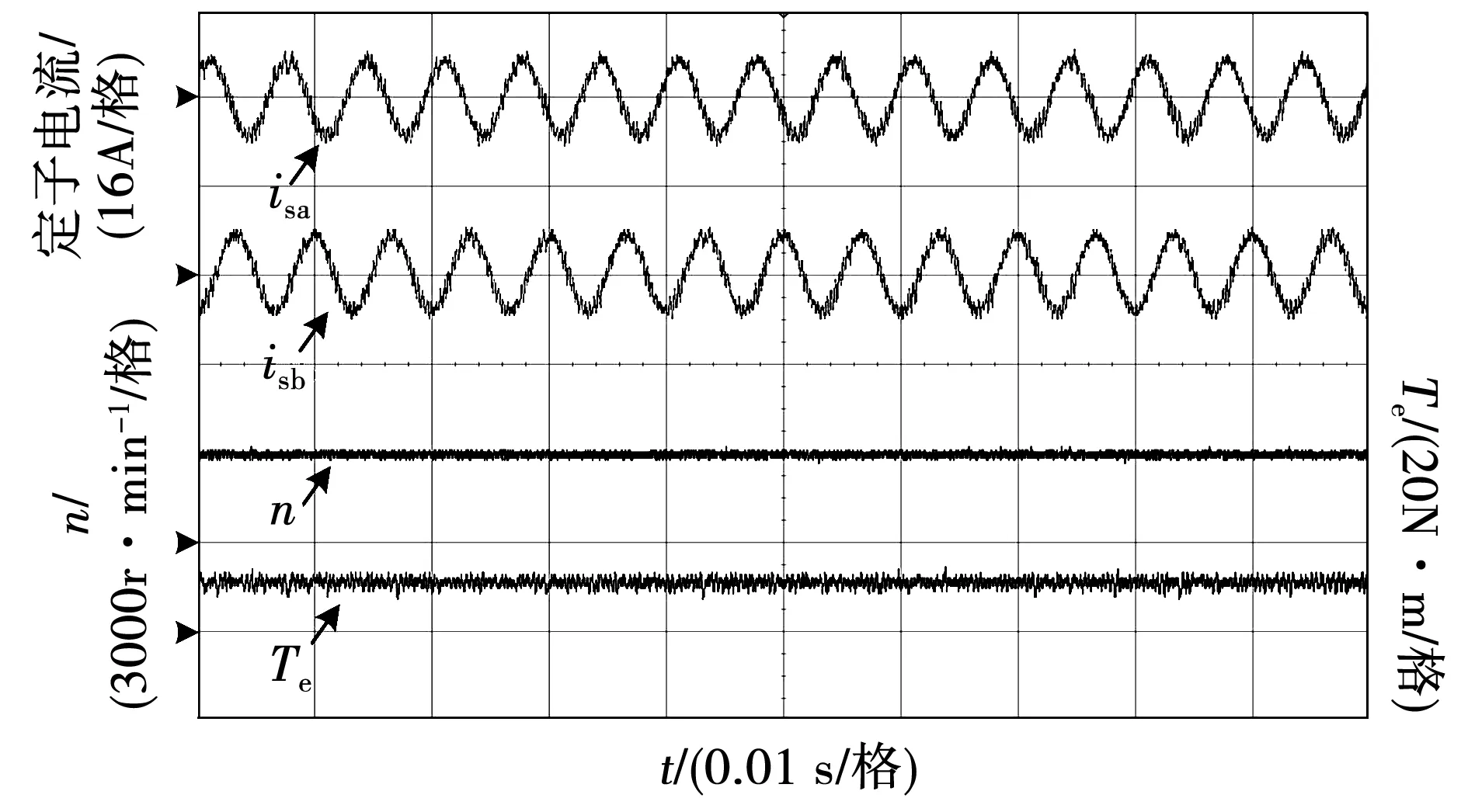
圖10 三矢量?jī)?yōu)化預(yù)測(cè)磁鏈控制穩(wěn)態(tài)運(yùn)行實(shí)驗(yàn)結(jié)果Fig.10 Experimental results of the improved three-vector MPFC under steady-state operation

表3 三矢量?jī)?yōu)化預(yù)測(cè)磁鏈控制與傳統(tǒng)預(yù)測(cè)磁鏈控制穩(wěn)態(tài)性能對(duì)比Table 3 Steady-state performance comparison between the improved three-vector MPFC and the conventional MPFC
由實(shí)驗(yàn)結(jié)果分析可知,優(yōu)化預(yù)測(cè)磁鏈控制雖然控制簡(jiǎn)單,但其存在電流及輸出轉(zhuǎn)矩脈動(dòng)均較大等問(wèn)題,而三矢量?jī)?yōu)化預(yù)測(cè)磁鏈控制在電流及輸出轉(zhuǎn)矩脈動(dòng)均得到有效抑制,穩(wěn)態(tài)性能明顯提高。
2)動(dòng)態(tài)性能。
為了對(duì)比優(yōu)化預(yù)測(cè)磁鏈控制與三矢量?jī)?yōu)化預(yù)測(cè)磁鏈控制算法的動(dòng)態(tài)響應(yīng)性能,首先設(shè)置了一組電機(jī)正反轉(zhuǎn)工況,永磁同步電機(jī)在空載情況下運(yùn)行。實(shí)驗(yàn)波形如圖11和圖12所示。從實(shí)驗(yàn)波形圖對(duì)比可以看出,永磁同步電機(jī)在兩種控制方法下實(shí)際轉(zhuǎn)速都能時(shí)刻跟蹤給定轉(zhuǎn)速,切換過(guò)程中轉(zhuǎn)速保持平穩(wěn),且過(guò)零點(diǎn)處系統(tǒng)穩(wěn)定,動(dòng)態(tài)性能良好。
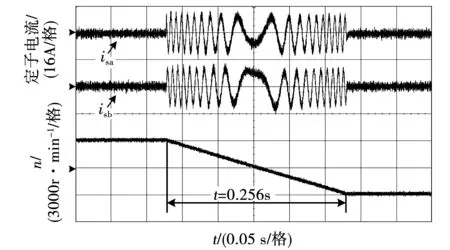
圖11 傳統(tǒng)預(yù)測(cè)磁鏈控制電機(jī)正反轉(zhuǎn)實(shí)驗(yàn)結(jié)果Fig.11 Experimental results of the conventional MPFC under motor forward and reverse

圖12 三矢量?jī)?yōu)化預(yù)測(cè)磁鏈控制電機(jī)正反轉(zhuǎn)實(shí)驗(yàn)結(jié)果Fig.12 Experimental results of the improved three-vector MPFC under motor forward and reverse
為了進(jìn)一步對(duì)比優(yōu)化預(yù)測(cè)磁鏈控制與三矢量?jī)?yōu)化預(yù)測(cè)磁鏈控制算法的動(dòng)態(tài)響應(yīng)性能,分別設(shè)置了負(fù)載突變和轉(zhuǎn)速突變兩組對(duì)比實(shí)驗(yàn)。其中,負(fù)載突變實(shí)驗(yàn)中永磁同步電機(jī)以額定速度3 000 r/min運(yùn)行,負(fù)載由10 N·m突然減至5 N·m。轉(zhuǎn)速突變實(shí)驗(yàn)中永磁同步電機(jī)在額定負(fù)載下運(yùn)行,轉(zhuǎn)速由3 000 r/min降至1 500 r/min。實(shí)驗(yàn)波形如圖13~圖16所示。在負(fù)載突變實(shí)驗(yàn)中,兩種控制策略均能在幾乎不影響轉(zhuǎn)速的情況下跟蹤給定負(fù)載,但在負(fù)載切換時(shí),三矢量?jī)?yōu)化預(yù)測(cè)磁鏈控制下的定子電流脈動(dòng)更小,在負(fù)載切換時(shí)能平滑過(guò)渡。在轉(zhuǎn)速突變實(shí)驗(yàn)中,三矢量?jī)?yōu)化預(yù)測(cè)磁鏈控制的響應(yīng)時(shí)間與傳統(tǒng)預(yù)測(cè)磁鏈控制的響應(yīng)時(shí)間近似一致。由于三矢量?jī)?yōu)化預(yù)測(cè)磁鏈控制減少了計(jì)算量,因此雖然控制算法更為復(fù)雜,但在動(dòng)態(tài)響應(yīng)上卻與傳統(tǒng)控制方法相似,且前者在速度切換時(shí)的電流波形更為平滑,因此較優(yōu)化預(yù)測(cè)磁鏈控制更佳。
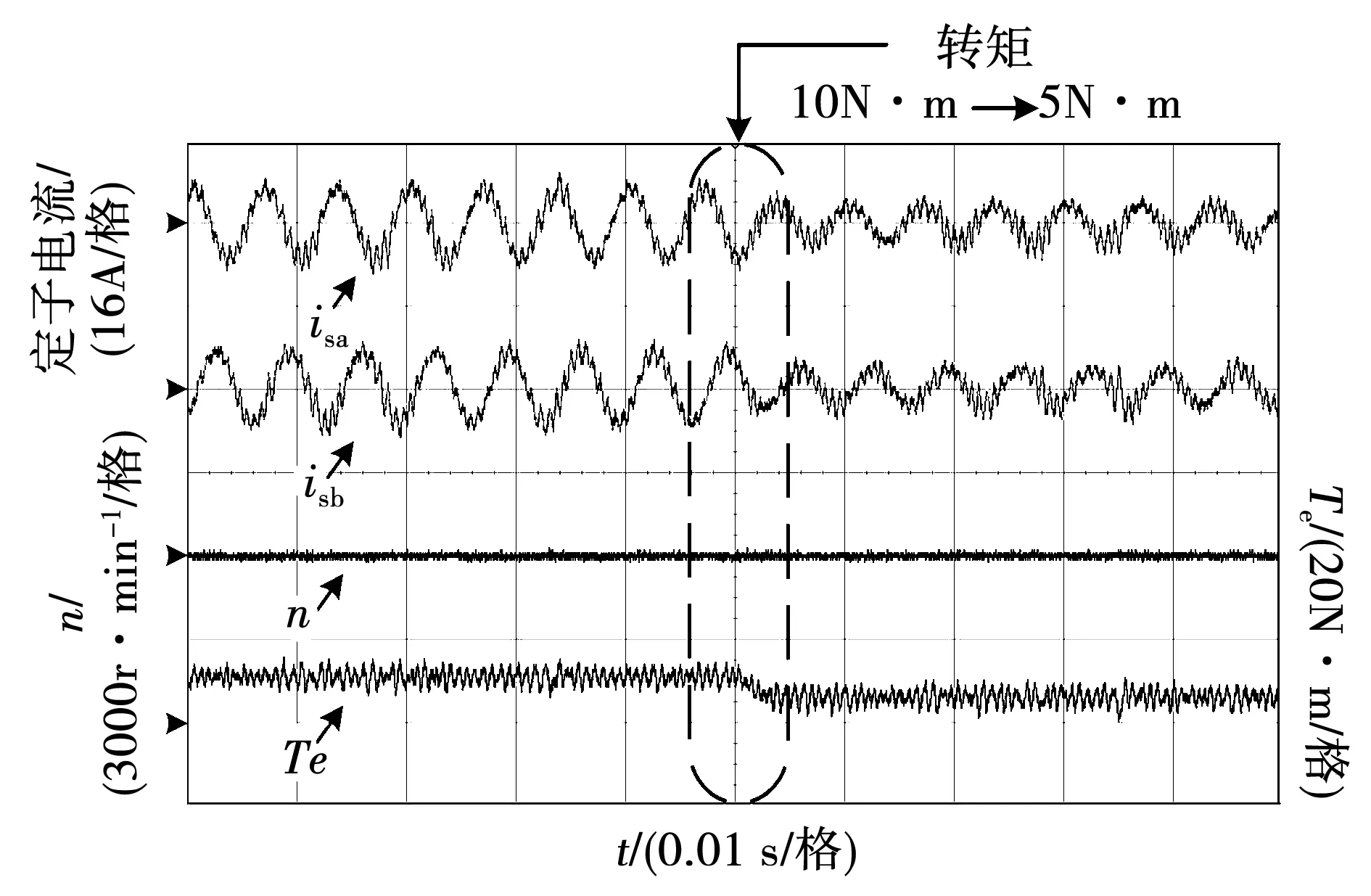
圖13 傳統(tǒng)預(yù)測(cè)磁鏈控制負(fù)載突變實(shí)驗(yàn)結(jié)果Fig.13 Experimental results of the conventional MPFC under load variations
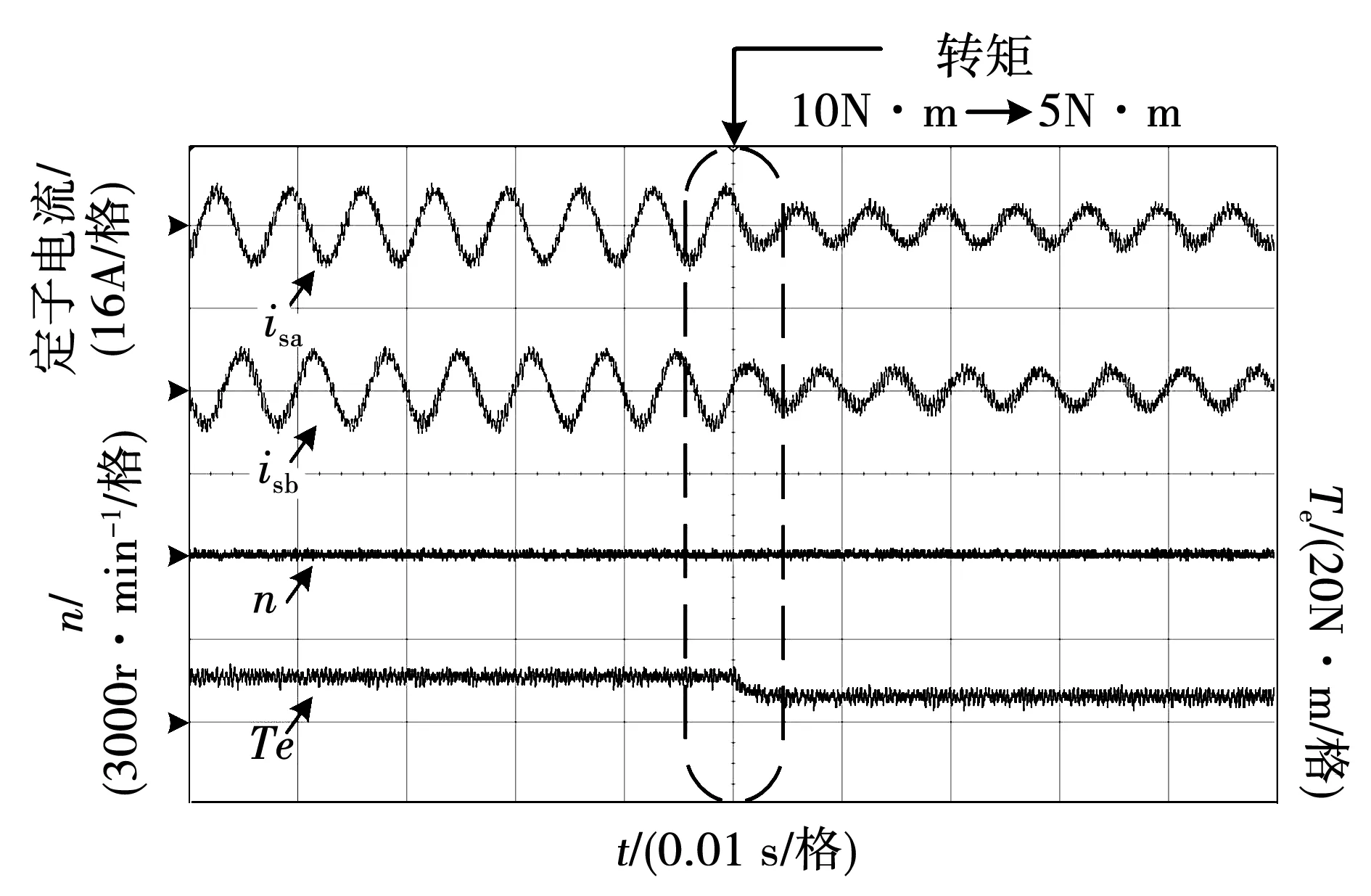
圖14 三矢量?jī)?yōu)化預(yù)測(cè)磁鏈控制負(fù)載突變實(shí)驗(yàn)結(jié)果Fig.14 Experimental results of the improved three-vector MPFC under load variations
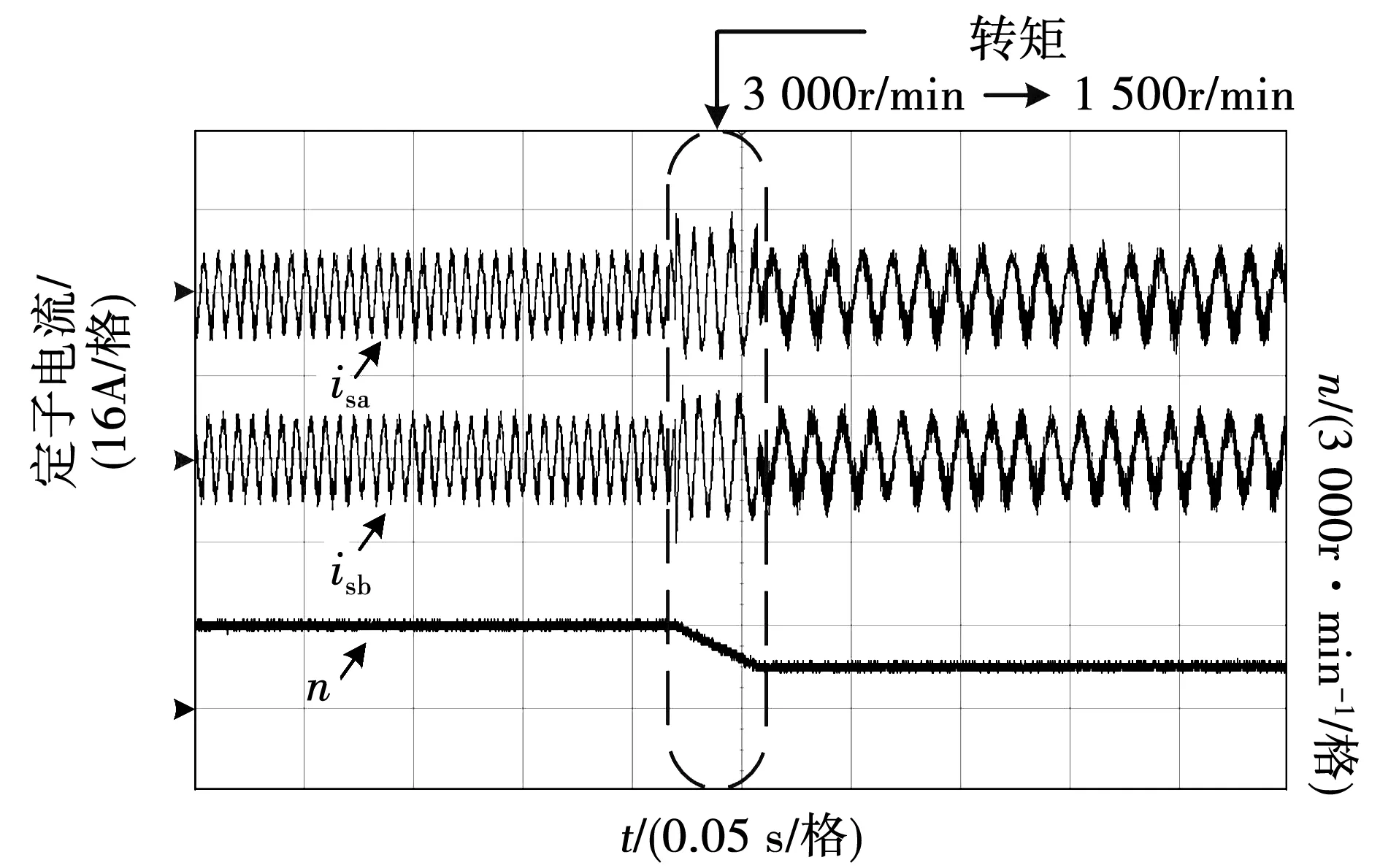
圖15 傳統(tǒng)預(yù)測(cè)磁鏈控制轉(zhuǎn)速突變實(shí)驗(yàn)結(jié)果Fig.15 Experimental results of the conventional MPFC under speed command variations
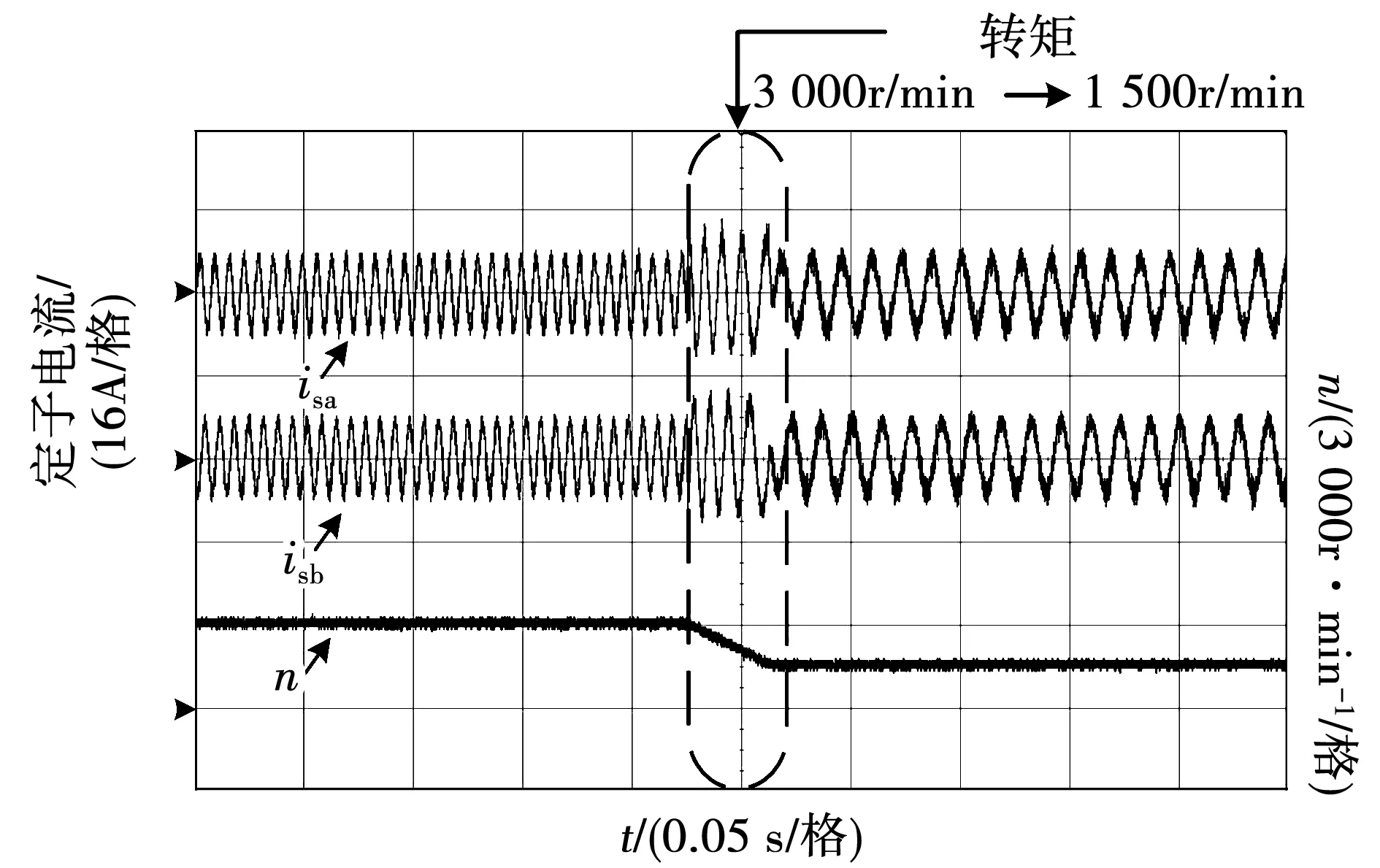
圖16 三矢量?jī)?yōu)化預(yù)測(cè)磁鏈控制轉(zhuǎn)速突變實(shí)驗(yàn)結(jié)果Fig.16 Experimental results of the improved three-vector MPFC under speed command variations
4 結(jié) 論
為了減少永磁同步電機(jī)傳統(tǒng)預(yù)測(cè)磁鏈控制的計(jì)算量及系統(tǒng)輸出脈動(dòng),本文研究一種三矢量?jī)?yōu)化預(yù)測(cè)磁鏈控制方法,在該方法中,單個(gè)控制周期內(nèi)輸出一個(gè)由兩個(gè)基礎(chǔ)有效電壓矢量和零矢量合成的虛擬電壓矢量,使系統(tǒng)輸出電壓矢量的覆蓋值變大,開關(guān)頻率固定。通過(guò)仿真及實(shí)驗(yàn)驗(yàn)證可得出:提出的三矢量?jī)?yōu)化預(yù)測(cè)磁鏈控制在電機(jī)正反轉(zhuǎn)、負(fù)載突變和轉(zhuǎn)速突變情況下具有和傳統(tǒng)預(yù)測(cè)磁鏈控制相當(dāng)?shù)膭?dòng)態(tài)響應(yīng)速度,可對(duì)系統(tǒng)給定值進(jìn)行快速跟蹤。與此同時(shí),三矢量?jī)?yōu)化預(yù)測(cè)磁鏈控制的電流脈動(dòng)及轉(zhuǎn)矩脈動(dòng)明顯減小,其穩(wěn)態(tài)性能明顯優(yōu)于傳統(tǒng)預(yù)測(cè)磁鏈控制,能實(shí)現(xiàn)更好的控制效果。
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
房地產(chǎn)導(dǎo)刊(2022年5期)2022-06-01 06:20:14
中學(xué)生數(shù)理化·中考版(2022年11期)2022-02-16 07:01:20
建材發(fā)展導(dǎo)向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導(dǎo)向(2021年7期)2021-07-16 07:07:52
中學(xué)生數(shù)理化(高中版.高二數(shù)學(xué))(2021年12期)2021-04-26 07:43:48
中學(xué)生數(shù)理化(高中版.高考數(shù)學(xué))(2021年12期)2021-03-08 01:28:50
小哥白尼(趣味科學(xué))(2019年6期)2019-10-10 01:01:50
發(fā)明與創(chuàng)新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
