基于駕駛人反應特性的車輛跟馳行為及模型
2021-09-03 09:46:50洪家樂曲大義賈彥峰黑凱先
青島理工大學學報 2021年4期
關鍵詞:模型
洪家樂,曲大義,賈彥峰,王 韜,黑凱先
(青島理工大學 機械與汽車工程學院,青島 266525)
隨著城市交通擁堵問題的日趨嚴重,從交通流運行規律探索交通擁堵產生的根源已成為國內外學者關注的重點。而對車流運行動態特性的研究,國內外集中對道路運行車輛之間的跟馳現象進行了深度的分析。為了揭示跟馳過程中交通擁堵的產生條件與作用機理,國內外學者根據車輛相互作用關系建立了各類交通流跟馳模型,包括刺激-反應類、安全距離類、生理-心理類模型等[1]。這些模型描述了車輛跟馳過程中的相互關系,對道路交通流的研究起到了促進的作用,為交通擁堵的機理解析和穩定性調控提供了方法。
車輛跟馳模型[2]從動力學角度分析了同車道上前導車與跟馳車之間縱向速度與距離的關系,車輛是否安全跟馳行駛取決于以下幾個因素:兩車間距、速度、后車的期望速度以及交通流狀態等。BANDO等[3]對Newell模型的加速度進行改進,提出的優化速度模型能夠更好地擬合交通流運行。JIANG等[4]通過實測數據分析發現廣義力模型存在車頭間距小于安全間距且后車速度大于前車容易發生追尾的問題,提出了全速度差模型。隨著對交通流模型研究的深入,學者們考慮到復雜道路中駕駛員特性與道路環境的影響,又對優化速度模型進行了改進,YU等[5]考慮相鄰車輛加速度差的影響,改進了全速度差模型,降低了車輛在跟馳運行時的波動性。針對國內特有的一些交通流現象,喻丹等[6]考慮將期望車頭時距視為常量,提出動態期望車頭時距的跟馳模型,使得車輛跟馳可以表述車輛性能和駕駛員等差異引起的動態變化。曲大義等[7]考慮車輛跟馳受前導車和道路環境的影響,引入分子相互作用勢建立改進跟馳模型,使得模型對實際交通流的擬合程度更高。安樹科等[8]考慮將多前車速度差及車間距等信息反饋改進跟馳模型,研究了多前車優化速度在擾動過程中起到的作用,拓展車輛跟馳的維度,使得車流跟馳運行更為平穩。因而研究車輛跟馳有必要探討跟馳車輛對于車頭間距的變化所產生的影響,故本文引入駕駛員在不同車頭間距條件下的反應特性,基于車頭間距反饋構建了考慮駕駛員特性的改進車輛跟馳模型,采用數值仿真方法驗證了駕駛員在跟馳中對于車間距的反應強度的影響。
1 駕駛員反應特性分析
駕駛員反應特性是駕駛員在跟馳過程中由于外界車輛刺激進行反應操作的特性,即跟馳車受前車速度、車間距影響呈現的制約性,對前車行進狀態反應呈現的延遲性,由制約性和延遲性導致車間狀態呈現的傳遞性。車輛跟馳的前提是:①道路平直,無交叉口和匝道,不允許超車;②車流是非自由流;③后方車輛的運行情況受前車的運行狀態影響。假設本車為跟馳車時,在跟馳行駛的情況下,跟馳駕駛員通過觀測與前車的間距進行反應操縱,有兩種跟馳情況:
1) 前后車間距較大時,前車運行狀態對后車的制約變小,后車可能會加速或勻速行駛,達到一定程度后前車的運行狀態對后車的制約又變大的跟馳模型;
2) 前后車間距較小時,前車對后車的影響較大,后車可能勻速或者減速行駛,經過一段時間后發現前車影響變小時又重新恢復原本運行狀態的跟馳模型。
這些由于駕駛員反應引起的跟馳現象對于交通流運行狀態有著重要影響。
2 跟馳模型構建
傳統的車輛跟馳模型可以簡單表示為
(1)
根據駕駛員對車頭間距的兩種跟馳情況進行分析,本文對車輛跟馳情況中的兩種狀態進行研究:①車間距較小時后車減速前進的跟馳模型;②車間距較大時后車加速前進的跟馳模型。設兩車以相同速度v1勻速行駛,兩車處于跟馳狀態且車間距較大。在t0時刻前車在位置xn(t0)處以減速度an開始減速,此時后車在位置xn+1(t0)。
2.1 車間距較小時后車減速前進
后車認為兩車間距足夠大之前,仍以原有速度行駛一段時間T0,當后車認為兩車間距快要接近安全車距時,才開始反應。經過反應時間T后,在t1=t0+T0+T時刻以減速度an+1開始減速,兩車處于跟馳狀態。前車經過時間Δtn(時刻t2=t0+Δtn)到達位置xn(t2),而后車經過時間Δtn+1(時刻t3=t0+T0+T+Δtn+1)到達位置xn+1(t3)后,兩車均以相同速度v2勻速行駛,繼續保持跟馳狀態,則
(2)
(3)
(4)
(5)
根據文獻[7,9]的研究,引入需求安全距離L(vn+1(t)),其中,L是后車在時刻t的速度位移函數,為車輛跟馳中后車相對于前車保持的安全距離。
1) 如果T0+T+Δtn+1>Δtn,則
(6)
t0時刻兩車的車頭間距為
s(t0)=xn(t0)-xn+1(t0)
(7)
t3時刻兩車的車頭間距為s(t3),則有s(t3)=xn(t3)-xn+1(t3),即
(8)
則車輛跟馳需求安全距離模型為
(9)
2)如果T0+T+Δtn+1<Δtn,則
(10)
t2時刻兩車的車頭間距為s(t2),則有s(t2)=xn(t2)-xn+1(t2),即
(11)
則車輛跟馳需求安全距離模型為
(12)
2.2 車間距較大時后車加速前進
后車認為兩車間距足夠大之前,以am+1加速行駛一段時間T0,當后車認為兩車間距快要接近安全車距時發現前車在減速,才開始反應,此時速度為v2′。經過反應時間T后,在t1=t0+T0+T時刻以減速度an+1開始減速,兩車處于跟馳狀態。前車經過時間Δtn(時刻t2=t0+Δtn)到達位置xn(t2),而后車經過時間Δtn+1(時刻t3=t0+T0+T+Δtn+1)到達位置xn+1(t3)后,兩車均以相同速度v2勻速行駛,后車繼續保持跟馳狀態,則
v2′=v1+am+1(T0+T)
(13)
(14)
(15)
(16)
(17)
1) 如果T0+T+Δtn+1>Δtn,則
(18)
t3時刻兩車的車頭間距為s(t3′),則有s(t3′)=xn(t3)-xn+1(t3),即
(19)
則車輛跟馳需求安全距離模型為
(20)
2) 如果T0+T+Δtn+1<Δtn,則
(21)
t2時刻兩車的車頭間距為s(t2′),則有s(t2′)=xn(t2)-xn+1(t2),即
(22)
則車輛跟馳需求安全距離模型為
(23)
3 穩定性分析
交通流穩定性的研究在交通流特性分析、交通安全及交通堵塞等方面有著重要影響[10]。在車流穩定運行時,當頭車受到微弱的干擾,車流的整體運行態勢會跟著發生改變。當擾動隨著車輛行進間的傳播隨之消散,則車流是穩定的,反之則是不穩定的。假設穩態交通流相鄰車輛的平均車頭間距Se和穩態交通流中車輛速度ve有如下關系:
Xn(t)=(n-1)Se+vetn=1,2,…,N
(24)
式中:Xn(t)為車輛n在t時刻的平衡態位置;Se為穩態車流平均車頭間距;ve為穩態速度;N為車輛數。
當頭車在運行過程中受到微弱的干擾時,則有
yn(t)=ceiwrn+zt=xn(t)-Xn(t)yn(t)→0
(25)
(26)
式中:yn(t)為車輛n在t時刻的車間擾動;c為常數;xn(t)為車輛n在t時刻受到干擾后的位置;z為特征值;wr為第r個傅里葉展開參數,r=0,1,...,N-1。
對式(25)兩側求導得
(27)
式中:τn為反應時間。

(28)
(29)
(30)
(31)
由式(28)—(31)可以得到

(32)
(33)
(34)
當z2<0時,交通流模型不穩定,反之,交通流模型穩定,故交通流穩定條件為
(35)
4 仿真分析
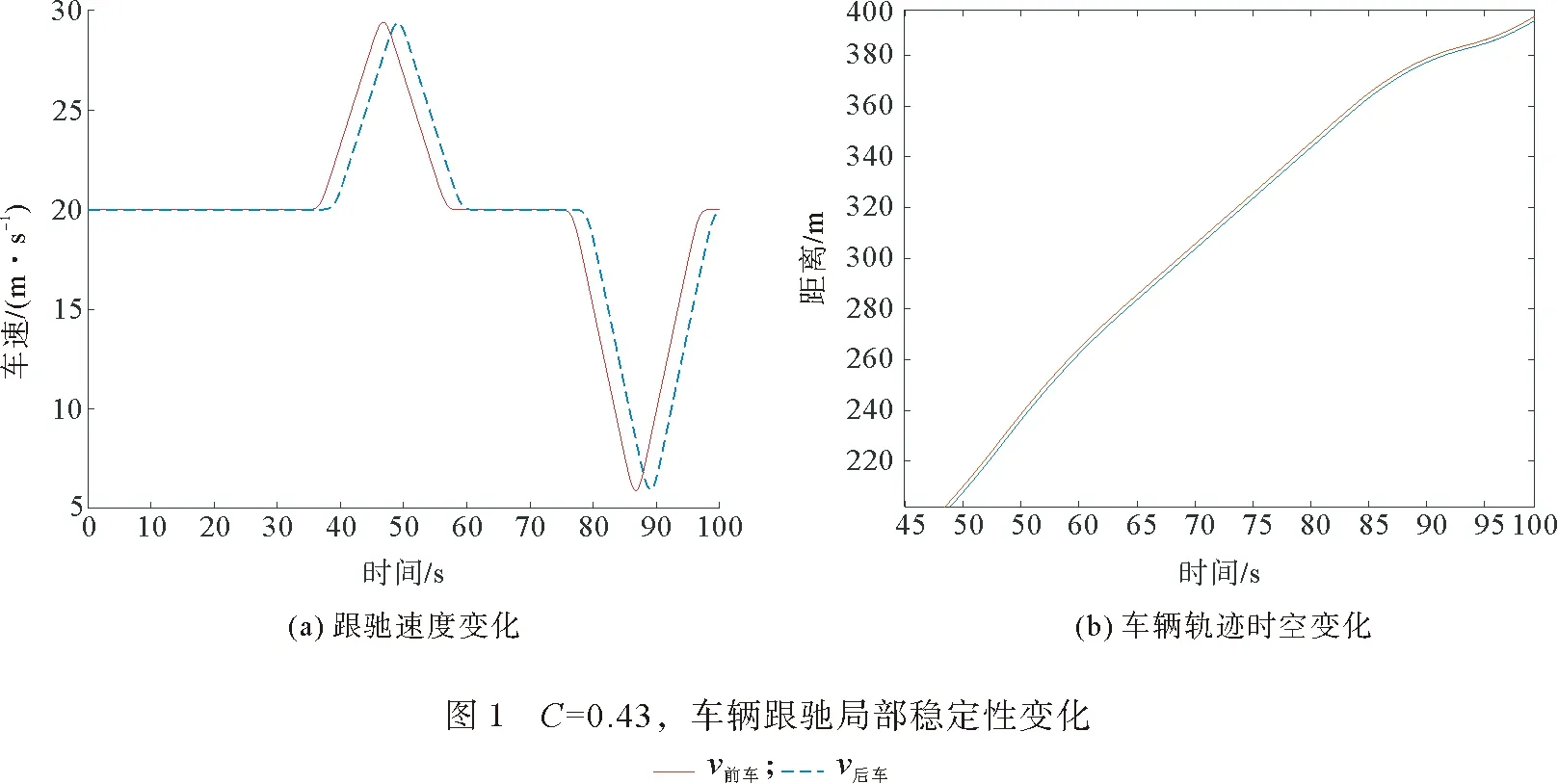
分析車流中車輛對其前車行為的反應能力對于估計駕駛環境的變化對交通狀況的影響是很重要的。為解釋這種行為,本文基于駕駛人反應特性的車輛跟馳行為的假設,構建了一個新的跟馳模型。該模型中的參數直接對應于駕駛員行為的明顯特征,當在模擬中將實際值分配給參數時,模擬再現真實交通流的運行特征。通過MATLAB軟件對車輛跟馳進行數值仿真,驗證駕駛人由于車間距刺激項產生的反應對于車輛跟馳的影響。仿真系統中參數設置為:車輛最大速度Vmax=30 m/s;需求安全車距為8 m;車輛初始速度均為v=20 m/s;采樣時間間隔t=0.1 s;反應時間T=1.0~1.5 s;車流為同步流。由于駕駛人的反應特性各不相同,只能在一定范圍內變化,故通過反應強度反映駕駛人的反應特性,根據文獻[11]的研究,對反應強度C=0.43,0.53,0.60進行取值模擬,分析不同反應強度值對于車輛跟馳速度、車間距的影響。
4.1 局部穩定性仿真分析
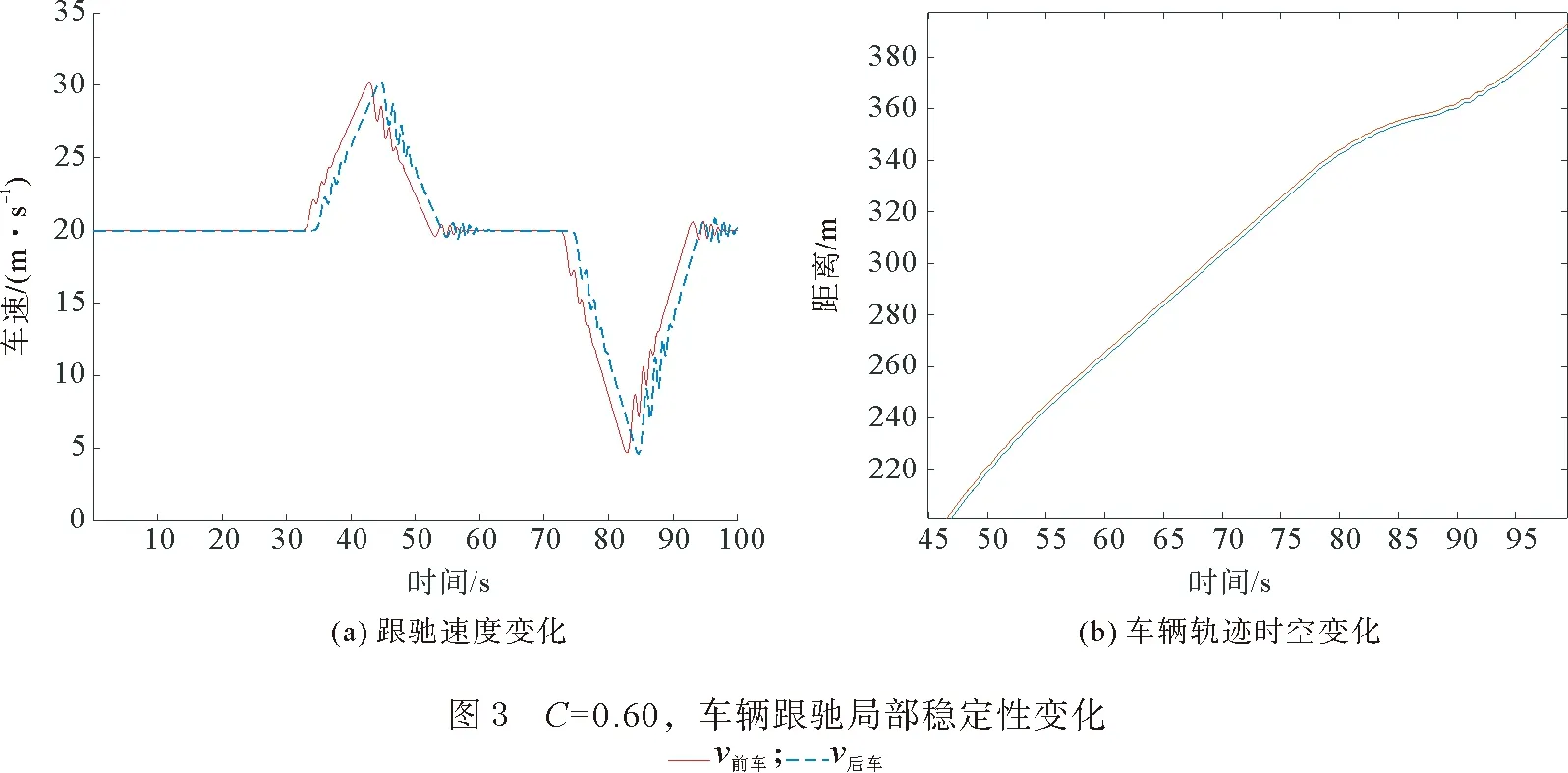
從圖1—圖3可以發現,隨著反應強度的增加,跟馳車輛的速度與車頭間距發生波動,而跟馳速度波動較為明顯;從圖3可以發現,反應強度達到0.60時,速度開始劇烈波動,車頭間距振幅開始增大,車輛會發生追尾危險。
4.2 漸近穩定性仿真分析
由圖4—圖6可以發現,在反應強度C=0.43時,跟馳車輛之間速度沒有明顯波動,交通流運行平穩。隨著反應強度的增加,車輛的速度變化對上游車輛產生了一定影響,交通流整體速度開始下降。在反應強度C=0.53時車流開始從下游到上游出現輕微震蕩,在反應強度C=0.60時車流劇烈震蕩,容易引發交通流失穩。



5 結論
本文依據跟馳理論對傳統跟馳模型進行研究,通過駕駛人對于跟馳過程中車間距變大或變小兩種情況的反應進行分析,并對2種情況中的2個跟馳狀態建立基于駕駛人反應特性的車輛跟馳模型。通過仿真能夠客觀準確地描述跟馳行為對交通流穩定性的影響,由道路中車輛之間跟馳行為產生的小擾動,從而進展成對交通流狀態的影響,仿真結果表明,在同步交通流中,駕駛員跟馳反應越激烈,車流的狀態越容易被破壞,甚至發生安全事故,從而演變成交通擁堵。基于駕駛人反應特性的車輛跟馳模型研究所涉及的速度、車間距及反應時間等參數對于正確理解駕駛行為,指導車路協同及無人駕駛的發展都具有很重要的意義。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19