建立不等式約束條件提高三軸一體光纖陀螺裝配合格率
2021-09-04 07:44:52劉元元馮文帥王利超
導航與控制 2021年3期
關鍵詞:調試
劉元元,馮文帥,李 青,高 天,王利超
(北京航天時代光電科技有限公司,北京 100094)
0 引言
在多數導航或姿態控制系統中,測量載體繞三個正交軸的角運動需要三個角速度傳感器。簡單的實現方案可采用三個單軸光纖陀螺進行組合[1],但組合后其體積、功耗和成本通常難以達到系統的要求。三軸一體光纖陀螺因其小型化、低功耗、低成本等優點[2],同時具備敏感三個正交方向的角運動能力,廣泛應用于導彈制導、車載導航、無人機等領域。
三軸一體光纖陀螺的實現方案有很多,如共用光源、時分復用、共用電路等[3-5],都是從減小體積、降低功耗、節約成本等方面考慮。根據項目的研制要求,采用光源共用而Y波導、光纖環、探測器、電路獨立使用的方案。光源設計及評價[6-8]代表了三軸一體陀螺總的輸入光功率,光學器件及其熔接損耗決定了后端光路的功率損耗水平[9]。光纖環作為光纖陀螺的核心敏感元器件,其評價方法見參考文獻[10]。與單軸光纖陀螺相比,三軸一體光纖陀螺需要嚴格控制光源光功率、耦合器分光、每軸光路的參數,避免差異太大導致某軸探測器電壓無法達到規定值,而致調試失敗。因此,需要對三軸一體光纖陀螺進行光路參數一致性研究。本文根據光源光功率與注入電流的關系以及現有的光學器件、熔接點等水平,建立了光路損耗不等式約束條件,給出了產品調試成功與否的區域。該控制方法可提高其裝配一致性,降低探測器電壓離散度,確保產品后續調測成功的合格率。過程中,引入了全光路檢測設備進行光路參數檢測,可提早發現并解決光路損耗異常的部件。最后,利用此過程控制方法,三軸一體光纖陀螺的調試合格率由75%提高到98%,常溫下零偏穩定性優于0.005(°)/h(100s,1σ),滿足任務要求。該控制方法可擴展應用在同類產品的過程裝配中。
1 三軸一體光纖陀螺總體方案
三軸一體光纖陀螺的三個光纖線圈采用同一個光源,其原理框圖如圖1所示。光源發出的光被1×3光纖耦合器分成三部分,分別進入三個環形干涉儀。干涉儀由耦合器、Y波導集成光學器件、光纖線圈和光電探測器組成。光通過耦合器后經Y波導集成光學器件分為相向傳輸的兩束光進入光纖線圈,返回到Y波導后,光纖線圈法向的旋轉使兩束光之間產生Sagnac相位差φs, 其干涉信號經過耦合器后由光電探測器檢測,光電探測器的輸出電流為

式(1)中,P為探測器接收到的光功率,Rf為探測器的響應度。
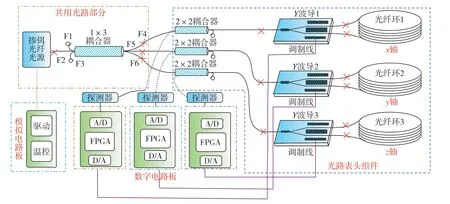
圖1 三軸一體光纖陀螺組件方案圖Fig.1 Schematic diagram of three-axis integrated FOG
2 三軸光路參數
2.1 過程檢測點
根據現有光學器件、熔接損耗水平,計算1km光纖環的光路總損耗,其最大值為18.5dB。對各光學器件及熔接點的損耗進行占比分析,結果如圖2所示。可以看出,Y波導損耗占比最大為54%,加入光纖環后占比為59%。因此,在光纖環連接Y波導后,需要對保偏光路進行損耗檢測。
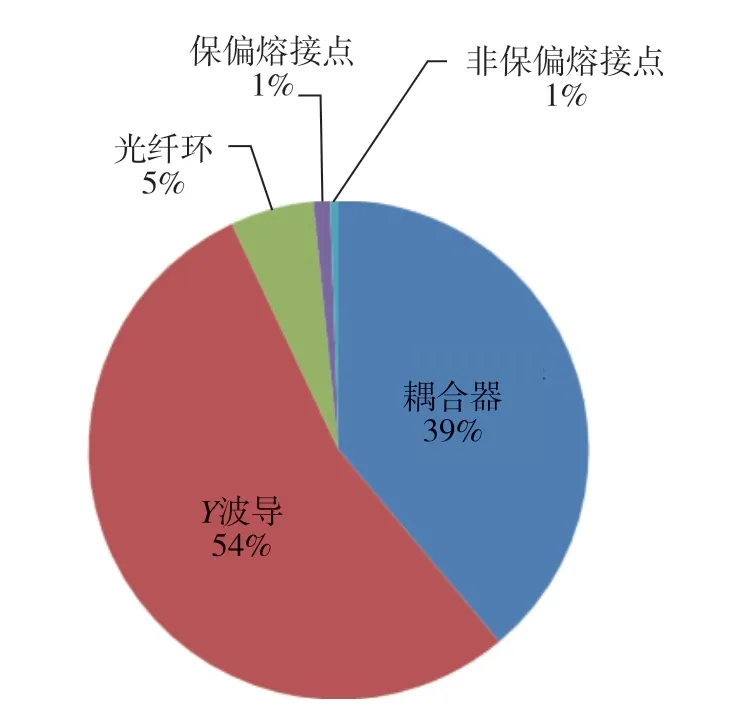
圖2 各光學器件及其熔接點的損耗占比Fig.2 Loss ratio of each opticaldevice and its fusion point
由于保偏光路對外只有一個熔接點,故只能通過特定的設備進行測試。為此,研發了一種全光路檢測設備如圖3所示,內含光源、光源驅動電路、耦合器、探測器、探測器接收電路。連接Y波導單端后,光路連接構成回路,探測器接收到光功率并轉換為電壓,電壓值顯示在相應的數字屏上。如果保偏光路損耗異常,轉換到的電壓值也會異常,需要進行排查才能進行后續連接,避免了帶隱患裝配,該過程可以對光纖環、Y波導進行篩選。
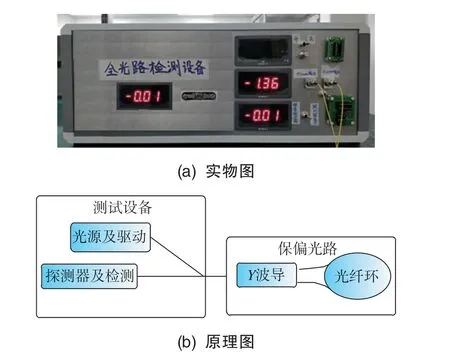
圖3 全光路檢測設備實物圖及原理圖Fig.3 Physicaldiagram and schematic diagram of allopticalpath detection equipment
假設保偏光路檢測點為必檢點1,保偏光路檢測無誤后進行耦合器裝配。在連接探測器前,需要對耦合器端進行光功率檢測,為必檢點2。如圖4所示,該過程可以對光源、耦合器、熔接點進行篩選。
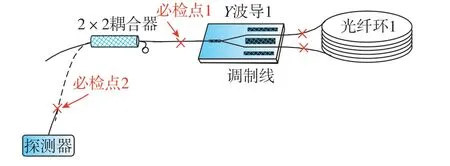
圖4 每軸光路引入的必檢點1、必檢點2Fig.4 Diagram of the required inspection points 1 and 2 of each opticalpath
對三軸一體光纖陀螺的必檢點進行光功率檢測,結果如表1所示。可以看出,在光源注入電流為100mA的情況下,到達必檢點2的光功率為85μW左右,僅為每路輸入光功率的2%。

表1 光路中必檢點1、必檢點2的測試結果Table 1 Test results of the required inspection points 1 and 2 in each optical path
2.2 過程約束條件
測試鉺源編號為E04-20007、E04-20008,不同注入電流下的輸出光功率如圖5所示。以E04-20007為例,光源輸出光功率與注入電流的關系如下

式(2)中,x為光源的注入電流,y為光源輸出的光功率。
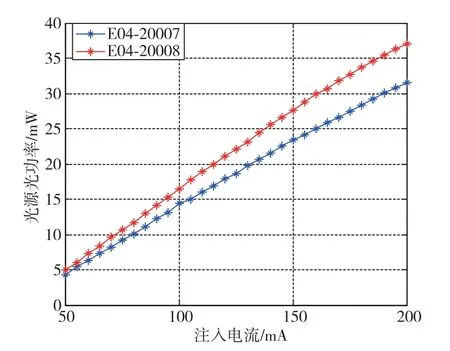
圖5 鉺源的光功率與注入電流之間的關系Fig.5 Relationship between light power and injection current of Erbium source
光源輸出的光功率增量與注入電流增量的關系為

式(3)中,Δx為光源的注入電流增量,Δy為光源輸出的光功率增量。由式(3)可知,注入電流以100mA為基準點,注入電流每增加10mA,光源光功率增加1.89mW,探測器處光功率增加12.60μW,而電壓增加4.8mV。
結合現有光學器件、熔接點損耗等技術水平,建立的光路損耗不等式約束條件如下
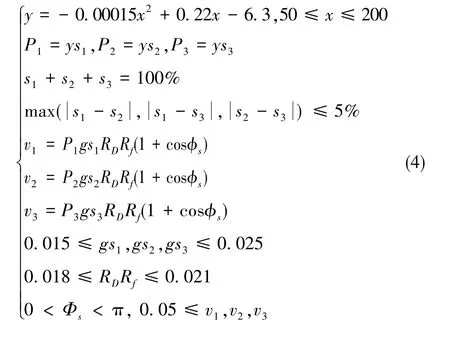
式(4)中,x為注入電流,y為鉺源光功率,s1、s2、s3為1×3光纖耦合器輸出端的分光比,P1、P2、P3為1×3光纖耦合器輸出端的光功率,gs1、gs2、gs3為3軸光路的損耗,RD為探測器的跨阻,Rf為探測器的響應度,Φs為光路調制深度,v1、v2、v3為3軸光路的探測器電壓。
由式(4)可知,小光功率光源對后端光路參數的要求較嚴格,而大光功率光源可承受后端光路參數一定范圍的波動。如編號E04-20007的鉺源,加調制后探測器電壓為50mV,注入電流為145mA;編號E04-20008的鉺源,加調制后探測器電壓為50mV,注入電流為130mA。因此,對于小光功率光源,需要嚴格檢測后端光路中各光學器件的損耗,防止損耗過大,注入電流超差。針對該三軸陀螺,調試結果如表2所示,規定注入電流不高于150mA,探測器電壓不低于50mV,則認為陀螺調試成功,其他情況認為陀螺調試失敗。
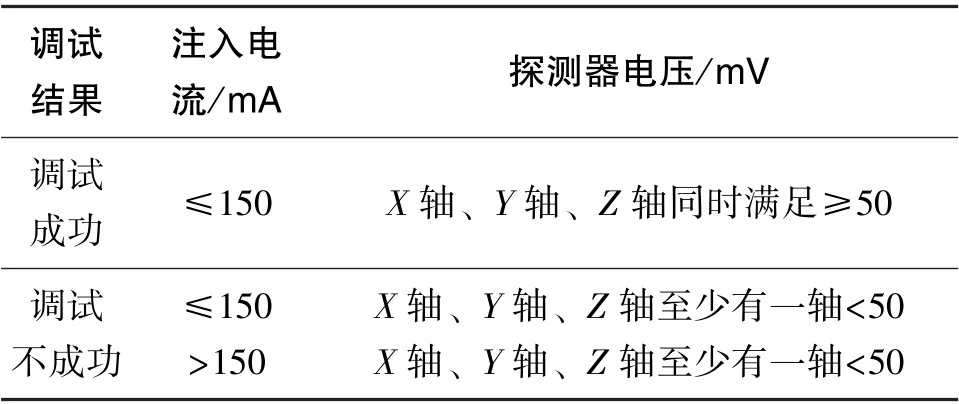
表2 三軸一體陀螺調試結果Table 2 Debugging results of three-axis integrated FOG
利用式(4)可得到兩鉺源裝配陀螺后調試成功的區域,如圖6所示。由于光學器件光損耗的波動范圍,每軸光路需要的光功率存在波動。當光源提供的輸入光功率值大于需要的光功率時,陀螺可以調試成功;若光源提供的輸入光功率值小于需要的光功率時,陀螺不能調試成功。由于1×3光纖耦合器本身存在分光不均的情況,所以光源提供的輸入光功率存在最大值和最小值。由圖6可知,由于編號E04-20007的鉺源光功率小,存在不能調試成功和可能調試成功的區域,設計、操作等人員必須嚴格控制后端光路的損耗,避開這兩個區域。相反,E04-20008的鉺源光功率大,只有調試成功和可能調試成功的區域,且大部分區域為調試成功的區域。
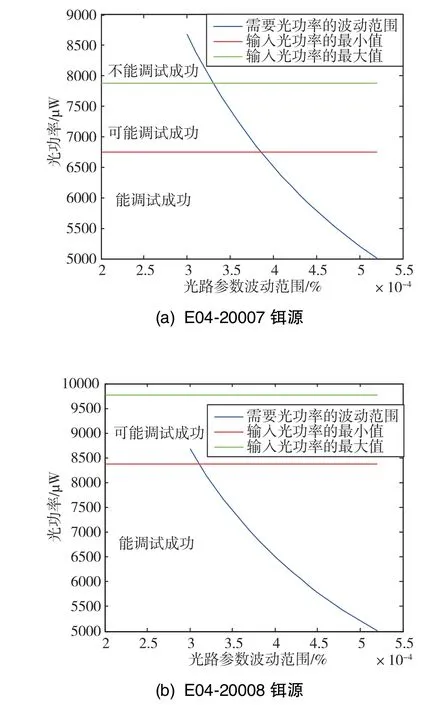
圖6 陀螺調試成功區域圖Fig.6 Diagram of FOG debugging success zone
3 實驗結果與分析
對已經裝配的14套三軸一體光纖陀螺進行狀態梳理,其中4套未施加任何控制方法,探測器電壓的離散情況如圖7(a)所示;另外10套施加上述過程控制方法,探測器電壓的離散情況如圖7(b)所示。統計探測器電壓的最大值、最小值、平均值、標準差,如表3所示。可以看出,未加控制手段的陀螺其探測器電壓離散度(標準差)為11.00,最大值為82mV,最小值為48mV。第3號陀螺的Y軸探測器電壓低于50mV,此時注入電流為150mA,不滿足指標要求,因此認為調試不成功。所以,三軸一體陀螺裝配后的調試成功率為75%。加控制手段后的陀螺其探測器電壓離散度(標準差)為4.00,最大值為69mV,最小值為51mV,調試成功率基本為100%,但仍存在不確定性因素,如測試誤差,因此調試成功率為98%。
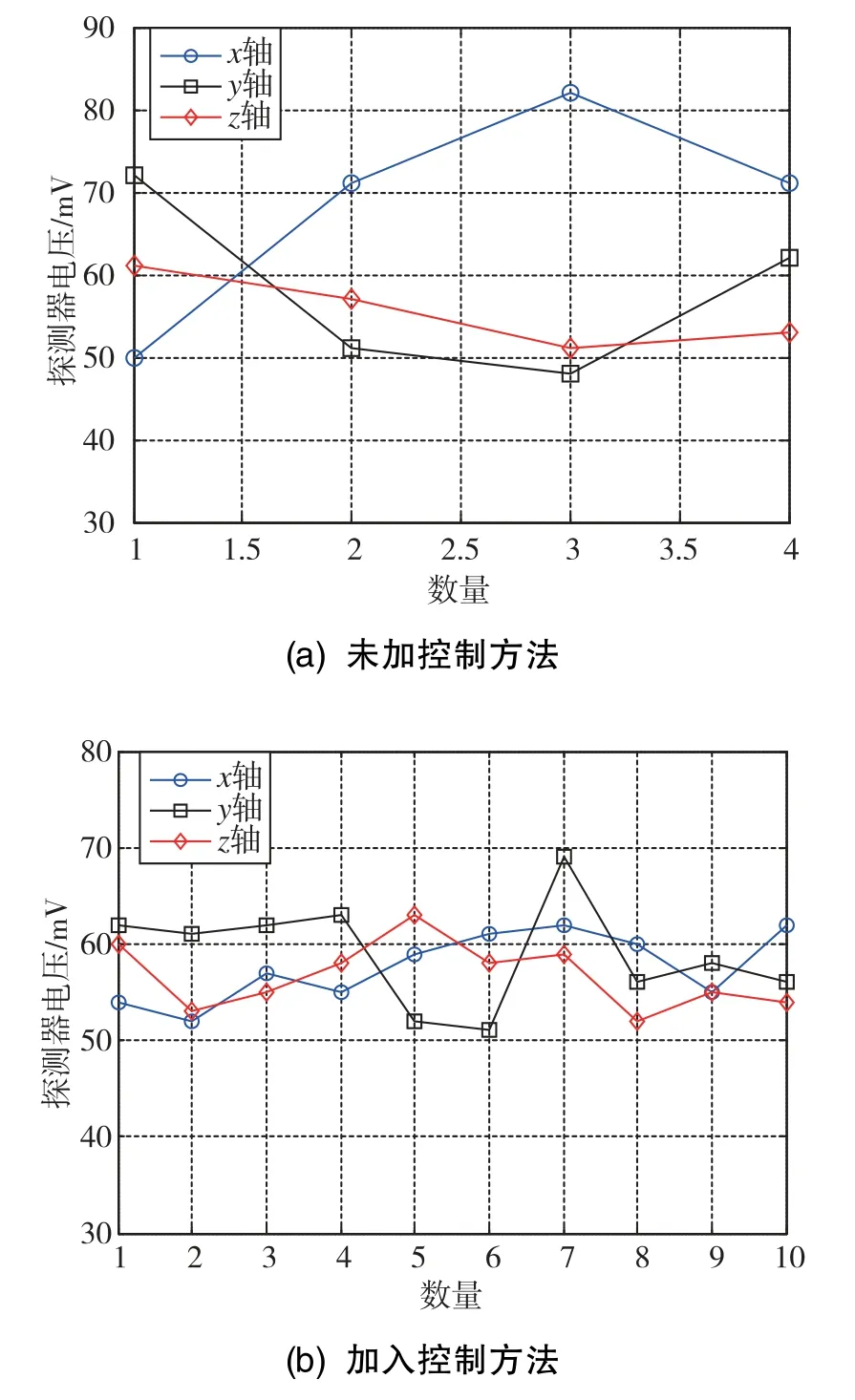
圖7 三軸一體光纖陀螺探測器電壓測試值Fig.7 Detector voltage test values of three-axis integrated FOG
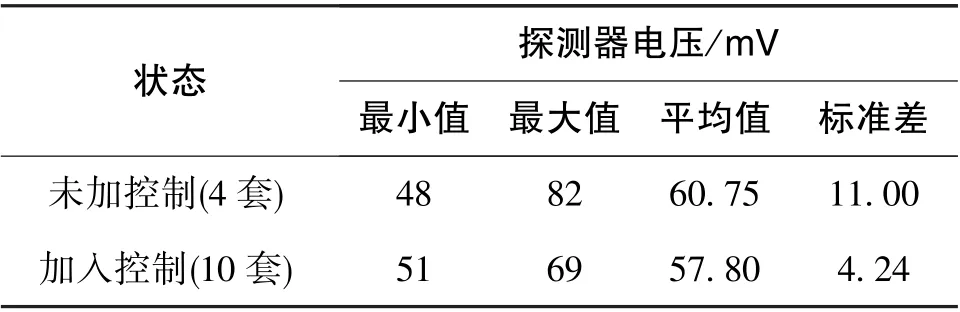
表3 三軸一體光纖陀螺探測器電壓統計數據Table 3 Statisticaldata about detector voltage of three-axis integrated FOG
在10套產品中,隨機選取2套產品,一個是E04-20007小功率鉺源,一個是E04-20008大功率鉺源,裝配過程的測試結果如表4所示。由于必檢點1的測試結果最終反映在必檢點2的測試結果上,因此必檢點1的數據未列入表4中。由表4可知,小功率鉺源裝配后注入電流離規定值的余量較小,若光路裝配過程控制不嚴格,很可能造成注入電流超差,影響鉺源的可靠性及壽命。因此,提前測試鉺源光功率對陀螺裝配過程很重要,尤其是小功率鉺源。

表4 三軸一體光纖陀螺過程測試結果Table 4 Proceduraltest results of three-axis integrated FOG
對上述2套產品進行常溫及全溫零偏穩定性測試,結果如表5所示。由表5可知,常溫零偏穩定性均優于0.005(°)/h(100s,1σ),補償后全溫零偏穩定性均優于0.01(°)/h(100s,1σ),滿足常溫及全溫零偏穩定性指標要求。
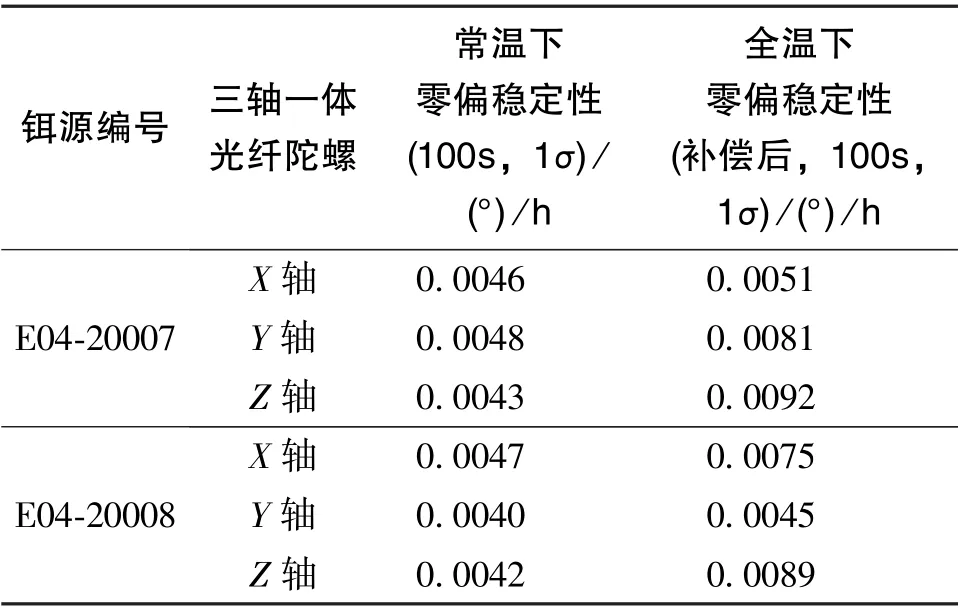
表5 三軸一體光纖陀螺測試結果Table 5 Test results of three-axis integrated FOG
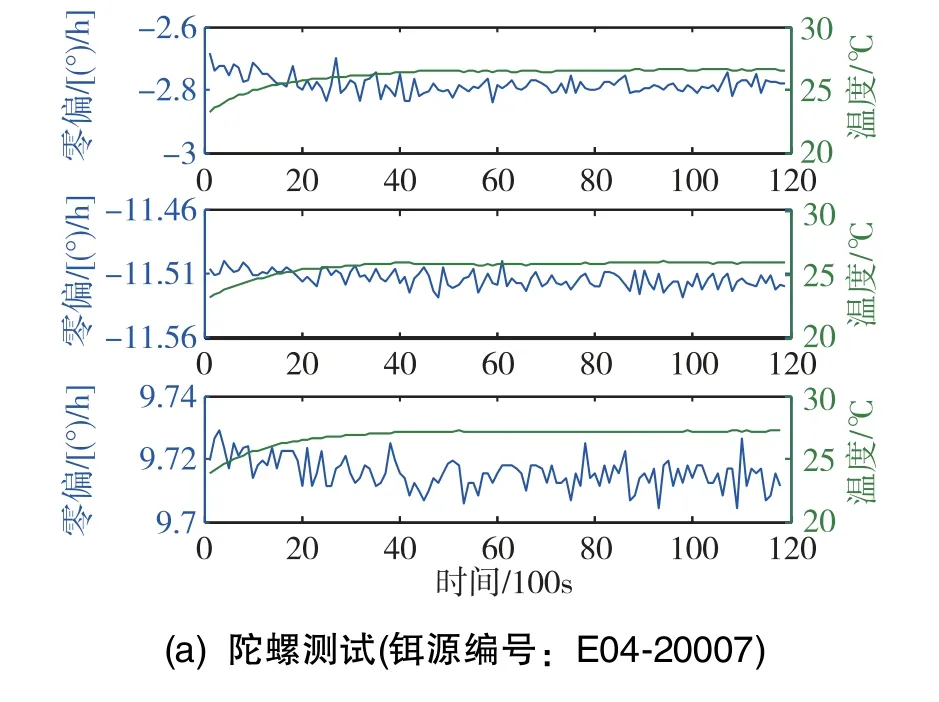
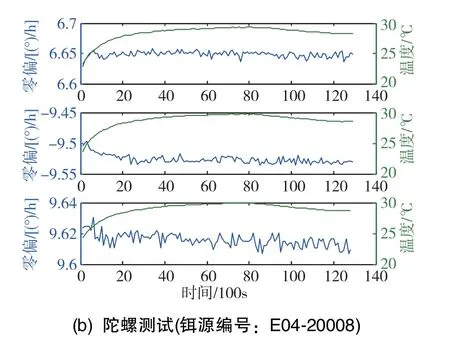
圖8 三軸一體光纖陀螺常溫測試曲線Fig.8 Test curves of three-axis integrated FOG at room temperature
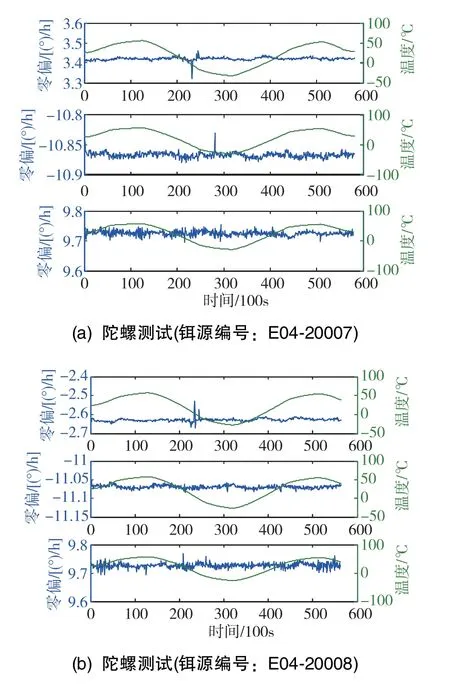
圖9 三軸一體光纖陀螺全溫測試曲線Fig.9 Test curves of three-axis integrated FOG at fulltemperature
常溫測試時間為3h,陀螺及溫度傳感器的輸出頻率為1Hz。對陀螺零偏數據進行百秒平滑,常溫測試曲線如圖8所示。由圖8可知,溫度隨測試時間逐漸上升并趨于穩定值,陀螺零偏隨測試時間漂移并趨于穩定值。扣掉前期漂移部分,陀螺零偏穩定性均優于0.004(°)/h(100s,1σ)。全溫測試曲線如圖9所示,溫度范圍為-40℃~+60℃,溫度變化率為1℃/min,高低溫保持時間為2h,補償后全溫零偏穩定性最優為0.0045(°)/h。
4 結論
本文對三軸一體光纖陀螺裝配一致性進行了研究,為保證組合調試成功的合格率,引入了兩個過程必檢點,對必檢點進行損耗估計,提前排除了損耗異常的元器件。其次,對光源進行了多注入電流點測試,得到了光功率與注入電流的關系。最后,建立了光路參數約束不等式方程組,并根據約束條件得到了陀螺調試成功與否的區域。若存在非調試成功的區域,需要操作人員嚴格控制后端光路的損耗,避免落入此區域。通過上述過程控制方法,三軸一體光纖陀螺調試的成功率由原來的75%提高到98%,三軸光纖陀螺的常溫零偏穩定性均優于0.005(°)/h(100s,1σ)。該方法對同類產品的裝配具有重要的參考價值。
猜你喜歡
電子制作(2018年12期)2018-08-01 00:47:44
石油化工建設(2018年1期)2018-07-10 09:49:50
制造技術與機床(2017年6期)2018-01-19 02:41:21
中國核電(2017年1期)2017-05-17 06:10:11
電子制作(2017年19期)2017-02-02 07:08:38
當代化工研究(2016年6期)2016-03-20 16:21:46
中國房地產業(2016年2期)2016-03-01 01:25:18
西部廣播電視(2015年5期)2016-01-16 03:45:05
石油化工建設(2015年5期)2015-12-01 04:17:19
電子設計工程(2015年3期)2015-02-27 12:04:00