時速160~200 km中速磁浮受流系統(tǒng)動力學(xué)研究
2021-09-04 07:25:14周策羅世輝馬衛(wèi)華
機械 2021年8期
周策,羅世輝,馬衛(wèi)華
時速160~200 km中速磁浮受流系統(tǒng)動力學(xué)研究
周策,羅世輝,馬衛(wèi)華
(西南交通大學(xué) 牽引動力國家重點實驗室,四川 成都 610031)
為了研究中速磁浮受流器在160~200 km/h速度等級下的運行狀態(tài),使用SIMPACK軟件建立自由度為134的新型中速磁浮車輛動力學(xué)模型,計算得到160 km/h、180 km/h、200 km/h三種速度工況下的車輛右前側(cè)受流器安裝位置振動響應(yīng)。將振動響應(yīng)作為外部激勵導(dǎo)入受流器-供電軌(靴軌)動力學(xué)模型,分別計算出三種速度下,靜態(tài)接觸力預(yù)設(shè)為120 N、130 N、130 N、140 N、140 N、150 N時受流器滑靴與供電軌間的動態(tài)接觸力。結(jié)果表明,要使受流器在該速度工況下均能穩(wěn)定工作,靜態(tài)接觸力預(yù)設(shè)值應(yīng)分別不低于130 N、140 N、150 N。
新型中速磁浮列車;受流器;動力學(xué)仿真;接觸力
磁浮列車作為一種新型交通工具,因其乘優(yōu)良坐舒適性、噪聲低、爬坡能力強等特點而獲得快速發(fā)展,其中具有代表性的為德國高速TR系列以及日本中低速HSST系列[1-2]。對中低速磁浮列車而言,其采用側(cè)接觸式受流方式,即通過位于懸浮架托臂下方的受流器與鋪設(shè)在軌道梁側(cè)部的接觸軌相互接觸獲取車輛運行所需要的電能[3]。但此受流系統(tǒng)也成為限制列車提速的重要因素,如何保證受流器穩(wěn)定受流越來越受到重視。
Stewart[4]根據(jù)試驗數(shù)據(jù)及仿真得出受流器接觸力隨第三軌表面高度的變化而變化,第三軌表面不平順會導(dǎo)致離線、滑靴表面出現(xiàn)較大的接觸力突變。針對中低速磁浮列車受流系統(tǒng),李寧等[5]研制了一款受流器,并指出受流滑靴和受流軌之間的接觸壓力必須保持在一定的范圍內(nèi),才能保證受流器符合列車運行的跟隨性要求。在實際應(yīng)用中,應(yīng)適當(dāng)選擇材料和彈簧剛度,保證列車平穩(wěn)受流。宋偉[6]研究了接觸軌安裝精度對中低速磁浮列車受流的影響,得出在控制總體絕對精度不超差的情況下,更要嚴格控制相鄰支撐點間的相對誤差,相對誤差宜控制在±2 mm內(nèi),保證軌面的平順性。陳明國等[7]研制了100 km/h拉簧式受流器,從結(jié)構(gòu)與數(shù)值計算上證明了該受流器的可靠性。劉銘[8]以時速160 km/h磁浮列車為研究對象,通過建立受流器-供電軌剛?cè)狁詈蟿恿W(xué)模型,得出供電軌選型、跨距及膨脹接頭選型等優(yōu)化方案。張鵬飛[9]研究了膨脹接頭階躍型不平順下受流器的通過性,得到前軌高于后軌,幅值為0~1 mm時受流器通過性較好。彭寶林等[10]研制了適用于160 km/h的氣動型受流器,從結(jié)構(gòu)和強度上證明了該受流器的可靠性。向梟笛[11]等針對地鐵靴軌系統(tǒng),分析了不同運行速度、結(jié)構(gòu)參數(shù)對靴軌沖擊振動相應(yīng)的影響規(guī)律,結(jié)果表明,合理增加受流系統(tǒng)阻尼不僅可以有效改善碰撞沖擊,還可以提高準高速運行條件下的靴軌匹配性能。
以上有關(guān)中低速磁浮靴軌系統(tǒng)動力學(xué)的研究,因受到磁浮車輛運行速度的限制,主要集中在160 km/h以內(nèi)的速度等級,對于更高速度等級的靴軌系統(tǒng)動力學(xué)研究較少,而基于空簧中置式新型懸浮架技術(shù)所設(shè)計的6懸浮架中速磁浮車輛的理論運行速度可以達到200 km/h,因此,有必要對160~200 km/h速度等級的受流器運行狀態(tài)進行分析,驗證其在該速度下的匹配性。
1 中低速磁浮懸浮架結(jié)構(gòu)
本文研究對象的運行速度涉及160~200 km/h速度區(qū)段,中低速磁浮車輛若采用既有的懸浮架,則很難達到所需的運行速度,因此本文以新型空簧中置式懸浮架為基礎(chǔ)進行動力學(xué)研究,兩種懸浮架結(jié)構(gòu)及對比如下。
既有中低速懸浮架均以日本HSST型為代表,懸浮架呈“口”字形結(jié)構(gòu),采用倒置式小空氣彈簧,且分別布置于兩側(cè)懸浮架縱梁的端部,左右兩個懸浮模塊依靠兩組抗側(cè)滾梁進行連接,而前后兩個相鄰的懸浮架之間則通過滑臺建立起垂向耦合關(guān)系,如圖1所示。為了對懸浮架的主體結(jié)構(gòu)進行對比分析,圖中省去了滑臺、液壓制動夾鉗、螺栓等結(jié)構(gòu)。

圖1 既有懸浮架(日本HSST型)
新型空簧中置式懸浮架以既有懸浮架為基礎(chǔ)進行改進,改進后的懸浮架在特征和承載上與既有懸浮架有顯著變化,以適應(yīng)提速和更加充分的運動解耦。懸浮架整體呈“工”字形結(jié)構(gòu),其采用正置式大空氣彈簧,分置于兩側(cè)懸浮架縱梁中部,左右兩個懸浮模塊僅通過一組抗側(cè)滾梁進行連接,而前后兩個相鄰的懸浮架之間無機械連接,如圖2所示。
二者主要區(qū)別(以后者為例說明)為:
(1)懸浮架與車體間通過正置空簧中置的方式進行減振;
(2)懸浮架取消了迫導(dǎo)向機構(gòu),其中第1、3、4、6位懸浮架與車體之間采用直線軸承連接,第二、五位懸浮架與車體固定連接;
(3)左、右懸浮模塊縱梁通過一組抗側(cè)滾梁進行連接;
(4)由于采用空簧中置方式,懸浮架可以有更多的空間以安裝功率更高的長直線電機,從而提高列車牽引性能。
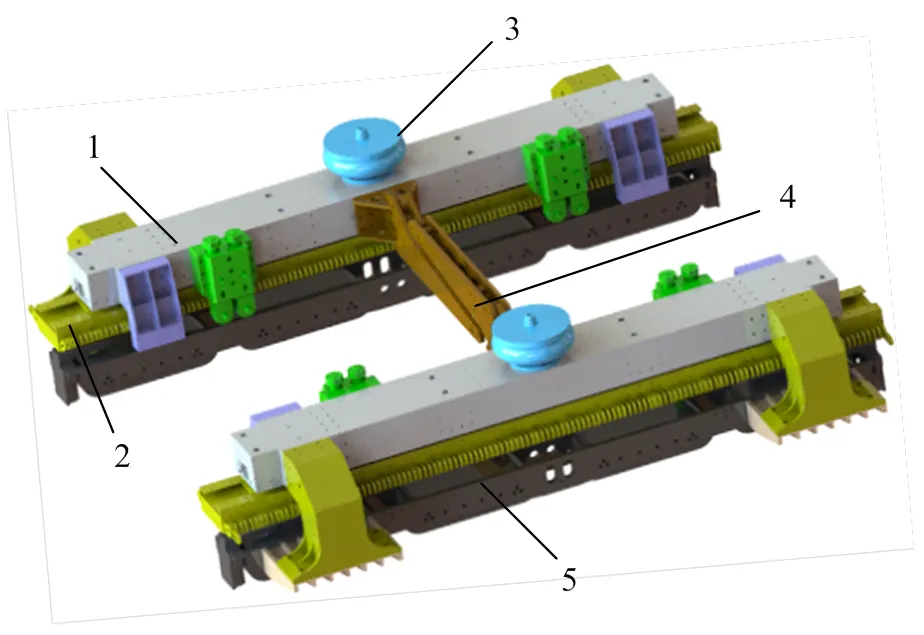
1.縱梁;2.直線電機;3.空氣彈簧;4.抗側(cè)滾梁;5.懸浮電磁鐵。
2 單編組磁浮列車動力學(xué)
在動力學(xué)建模過程中,需要對磁浮列車的結(jié)構(gòu)進行適當(dāng)簡化。本文使用SIMPACK軟件建立磁浮列車動力學(xué)模型,其中包括1個車體、6個懸浮架、6組抗側(cè)滾梁、4組移動滑臺(第1、3、4、6位懸浮架)、2組固定滑臺(第2、5位懸浮架)、6組牽引桿等結(jié)構(gòu),共計134個自由度。對于中速磁浮車輛動力學(xué)模型而言,常用的磁軌關(guān)系有兩種,一種是懸浮控制模型,另外一種是彈簧阻尼模型。考慮到6懸浮架中速磁浮車輛共需48個控制子模型,每一個控制點本身構(gòu)成一個較為復(fù)雜的動力學(xué)子系統(tǒng),若采用懸浮控制模型,計算效率將大大降低。同時由于本研究只涉及直線段,而兩種方法在計算直線段的平穩(wěn)性、振動加速度和懸浮力時,計算精度相差較小[12],因此選擇使用彈簧阻尼模型法來建立磁軌關(guān)系。整車模型如圖3所示。
由于目前尚未有適用于中低速磁浮的軌道譜,本次仿真采用德國高速低干擾軌道譜[12],將軌道水平不平順以及垂向不平順作為外部激勵進行計算,其擬合公式為:
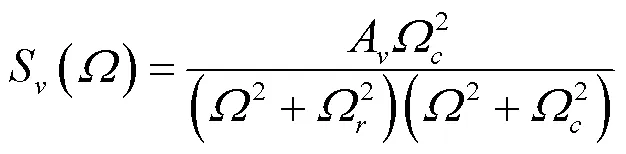
圖3 6懸浮架磁浮車輛動力學(xué)模型
其橫向激擾以及垂向激擾隨里程的變化曲線如圖4、圖5所示。
2.1 仿真分析
車輛動力學(xué)仿真共設(shè)置6個速度工況:100~200 km/h(間隔為20 km/h),線路僅考慮直線段,動力學(xué)模型部分參數(shù)如表1所示。
2.1.1 車體平穩(wěn)性指標
根據(jù)GB 5599-2019[13]中對于Sperling平穩(wěn)性指標的加權(quán)計算方法對本文所建中速磁浮車輛的平穩(wěn)性(垂向、橫向)進行分析,結(jié)果如圖6、圖7所示。
從車輛橫向以及垂向平穩(wěn)性指標可以看出,無論是車輛頭部還是尾部,其平穩(wěn)性均隨車輛運行速度的增大而增大,車輛頭部平穩(wěn)性略優(yōu)于尾部,但均未超過2.5,平穩(wěn)性等級屬于優(yōu)秀。
車輛平穩(wěn)性指標表明車輛在所涉及速度下均以穩(wěn)定狀態(tài)運行,后續(xù)靴軌系統(tǒng)動力學(xué)研究在此基礎(chǔ)上展開。
2.1.2 受流器安裝位置點動態(tài)響應(yīng)
對于6懸浮架中速磁浮列車而言,受流器分別安裝于第2位、第5位懸浮架的四個托臂下方,呈左右對稱分布,共計8個,以R標識前進方向的右側(cè),以F、B標識受流器在懸浮架上的前、后順序,如圖8所示。
考慮到懸浮架左右模塊具有對稱性,因此仿真時僅以右側(cè)受流器安裝位置2R-F位為研究對象,同時選取160~200 km/h(間隔20 km/h)共計3個速度工況進行分析。
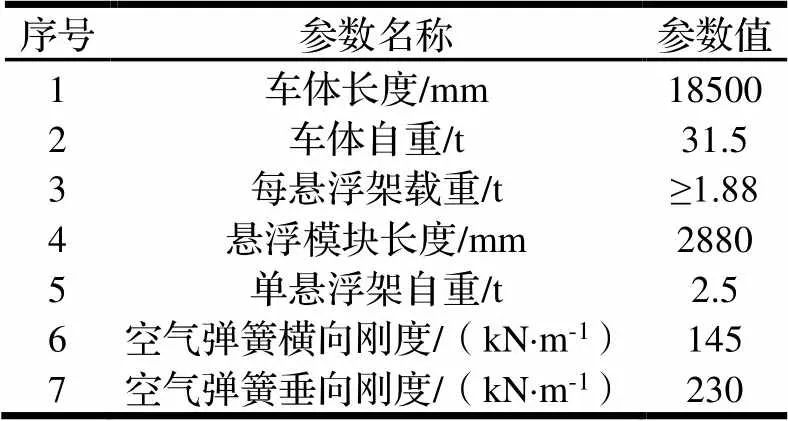
表1 動力學(xué)模型部分參數(shù)
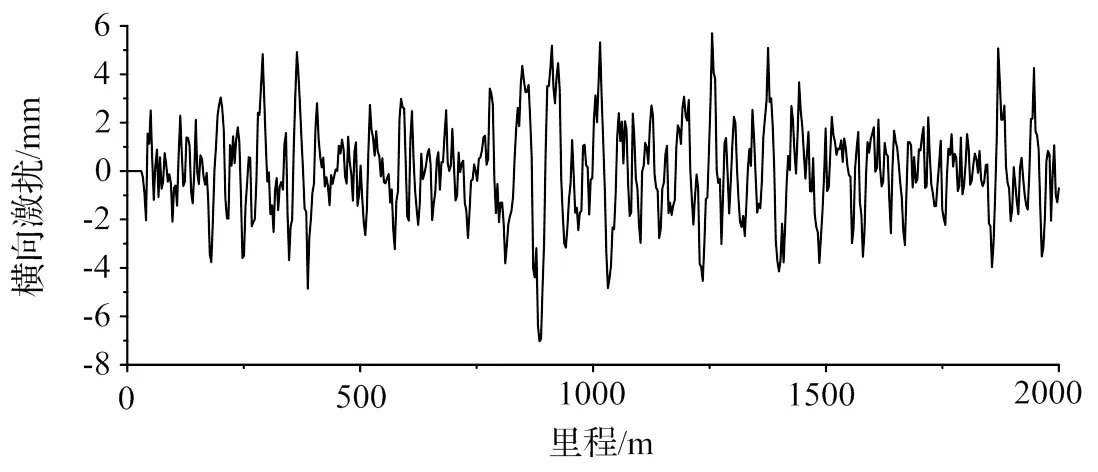
圖4 橫向激擾
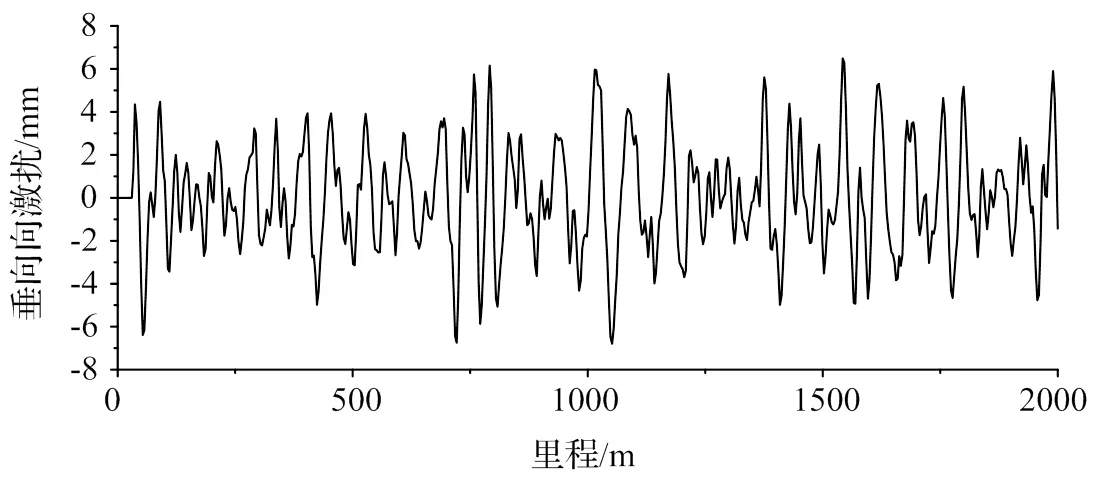
圖5 垂向激擾
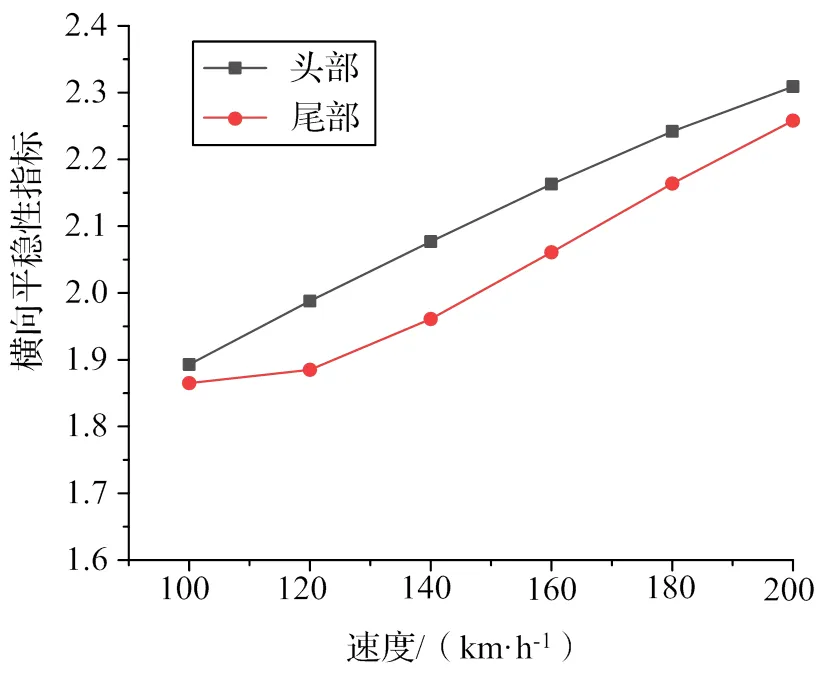
圖6 車體橫向平穩(wěn)性指標
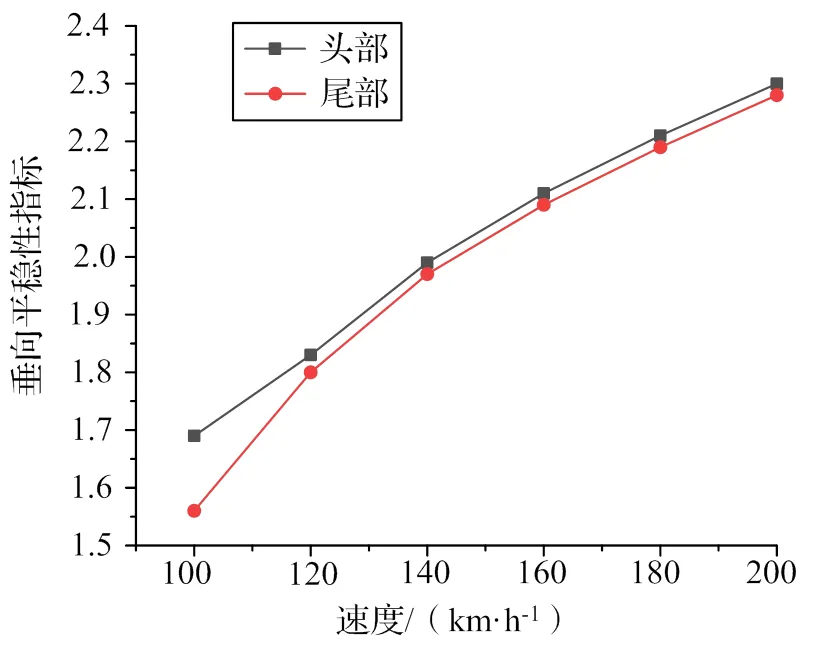
圖7 車體垂向平穩(wěn)性指標

圖8 受流器布置
圖9為160~200 km/h速度下,受流器安裝位置點的橫向位移,從圖中可以看出受流器安裝位置點的橫向位移隨著磁浮車輛運行速度的增大而增大,其正幅值均不超過6 mm,負幅值均不超過5 mm。
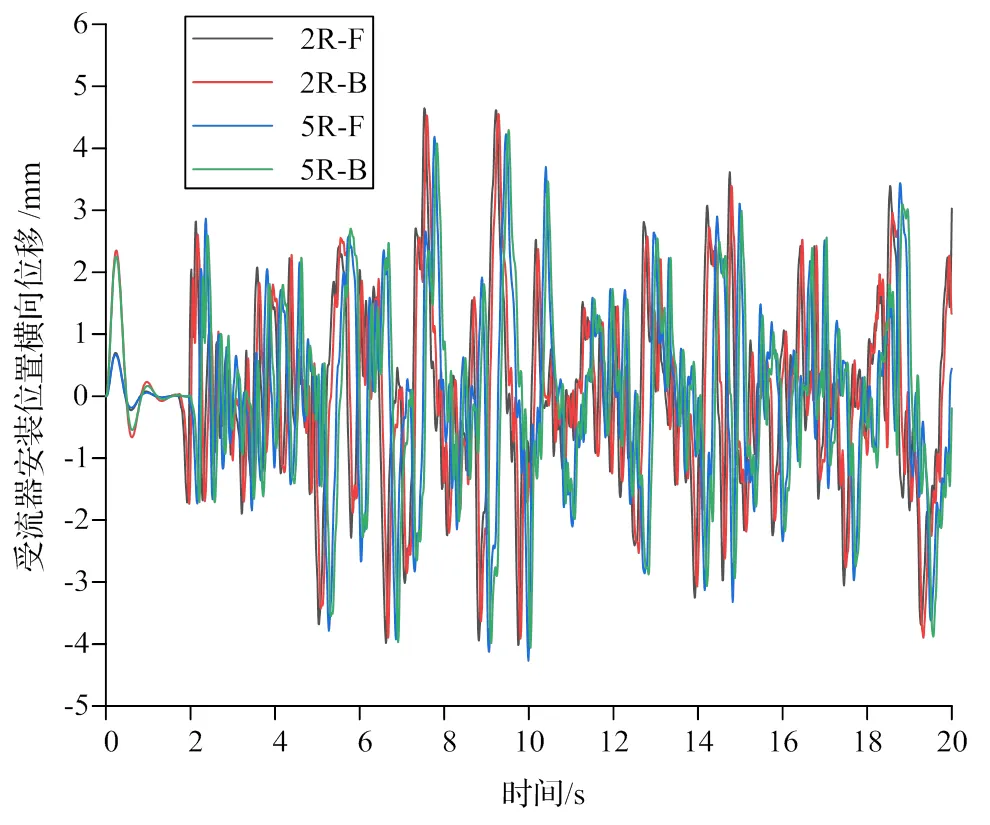
圖9 受流器安裝位置點橫向位移
圖10為160~200 km/h速度下,受流器安裝位置點的垂向位移,從圖中可以看出受流器安裝位置點的垂向位移隨著磁浮車輛運行速度的增大而增大,其正幅值均不超過9 mm,負幅值均不超過7 mm。
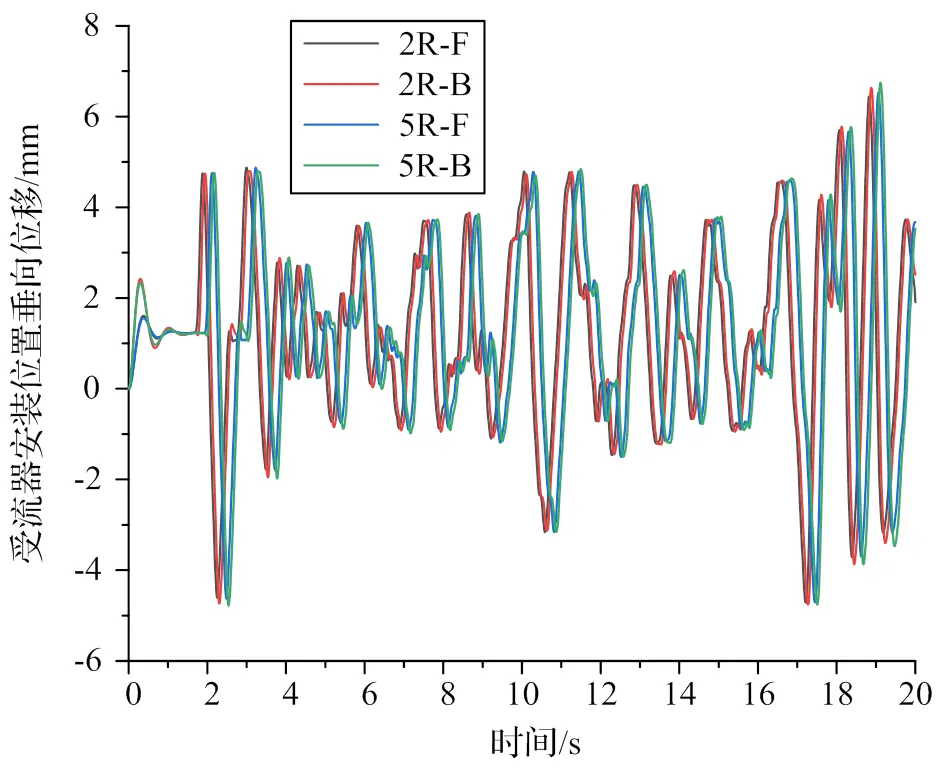
圖10 受流器安裝位置點垂向位移
3 靴軌系統(tǒng)
中速磁浮受流系統(tǒng)采用側(cè)接觸受流方式,即通過受流器與供電軌(常見形式分為工字軌與C型軌)接觸獲取電能,受流器工作時的額定電壓/電流為DC 1500 V/600 A。
本文所選中速磁浮車用拉簧式受流器滑靴工作范圍為0~40 mm,其結(jié)構(gòu)如圖11所示。出于輕量化以及經(jīng)濟性的考慮,擺臂機構(gòu)采用鋁合金鑄件,滑靴通過使用浸金屬碳材料,以達到提高耐磨耗性以及降低噪聲的目的。彈簧系統(tǒng)與擺臂機構(gòu)的下臂相連,帶動整個連桿機構(gòu)運動。根據(jù)不同工況的需要,通過調(diào)節(jié)螺旋彈簧的長度,設(shè)置不同彈簧預(yù)緊力,使靴軌間的接觸壓力保持在某一穩(wěn)定范圍內(nèi),其標準額定接觸壓力為120±30 N。
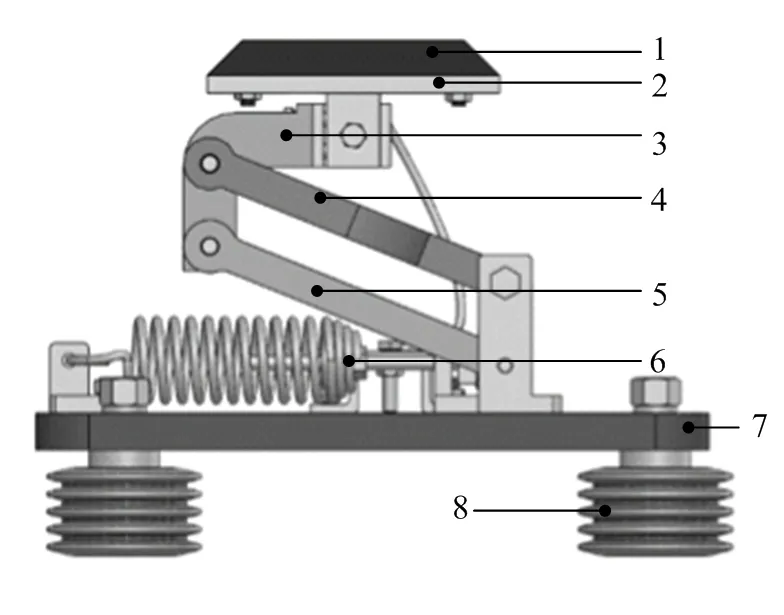
1.滑靴;2.滑靴座;3.連桿;4.上臂桿;5.下臂桿;6.拉簧;7.絕緣板;8.絕緣子。
3.1 靴軌動力學(xué)模型
在多體動力學(xué)軟件中建立受流器與供電軌動力學(xué)模型,其中供電軌軌面不平順選取前述德國高速低干擾譜幅值的一半[14]。
受流器拉簧剛度為13300 N/m,滑靴與供電軌接觸剛度為3×107N/m。受流器與供電軌動力學(xué)模型如圖12所示。
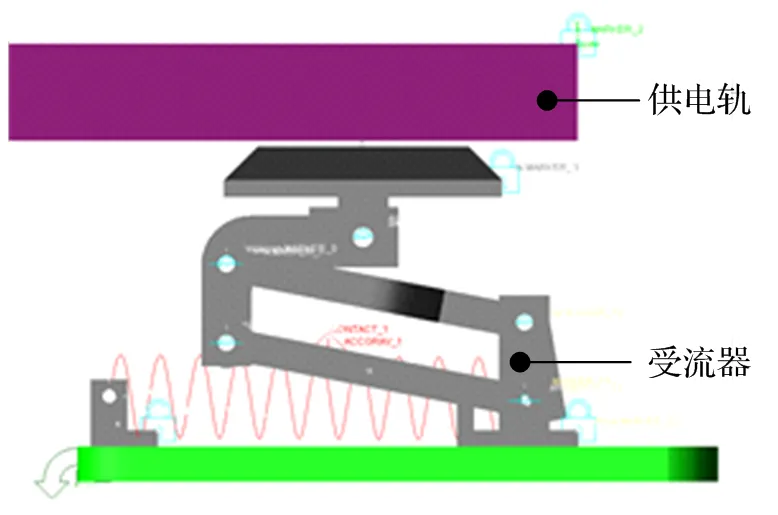
圖12 靴軌動力學(xué)模型
所用受流器材料參數(shù)見表2。
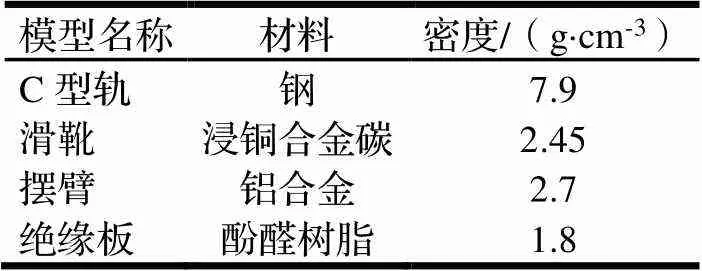
表2 模型材料
3.2 仿真分析
受流器通過絕緣板固定安裝在懸浮架上實現(xiàn)隨車運動,因此為了考慮中速磁浮車輛運行對受流器工作的影響,在絕緣板處設(shè)置驅(qū)動,并將此前得到的受流器安裝位置點的位移作為外部激勵,導(dǎo)入到靴軌系統(tǒng)動力學(xué)模型中,根據(jù)使用經(jīng)驗,利用三次樣條(CUBSPL)插值法將其添加到受流器絕緣板處設(shè)置的驅(qū)動中。
通常受流質(zhì)量評價指標包括接觸力最大值、最小值、平均值、標準差等,本文選取接觸力平均值、標準差進行統(tǒng)計分析。
動態(tài)接觸力的平均值為:
動態(tài)接觸力標準差為:
式中:為動態(tài)接觸力的標準差,N。
接觸力標準差反映靴軌間動態(tài)接觸力波動情況,標準差越小,表明動態(tài)接觸力波動越小,即受流越穩(wěn)定,反之則越差。
依據(jù)空簧中置式磁浮車輛能夠達到的運行速度,靴軌系統(tǒng)動力學(xué)仿真共設(shè)置有160 km/h、180 km/h、200 km/h三種速度工況,其中,160 km/h速度工況分別設(shè)置120 N、130 N靴軌靜態(tài)接觸力,180 km/h速度工況分別設(shè)置130 N、140 N靴軌靜態(tài)接觸力,200 km/h速度工況分別設(shè)置140 N、150 N靴軌靜態(tài)接觸力,共計六種仿真工況。
圖13為160 km/h速度工況下的仿真結(jié)果。從圖13(a)可知,當(dāng)中速磁浮車輛運行速度為160 km/h時,如果靴軌間的靜態(tài)接觸力設(shè)置為120 N,則在運行過程中會出現(xiàn)動態(tài)接觸力為0的情況,即發(fā)生離線現(xiàn)象。從圖13(b)可知,當(dāng)靜態(tài)接觸力增加到130 N時,運行過程中的動態(tài)接觸力均大于0,表明受流器能夠穩(wěn)定工作。
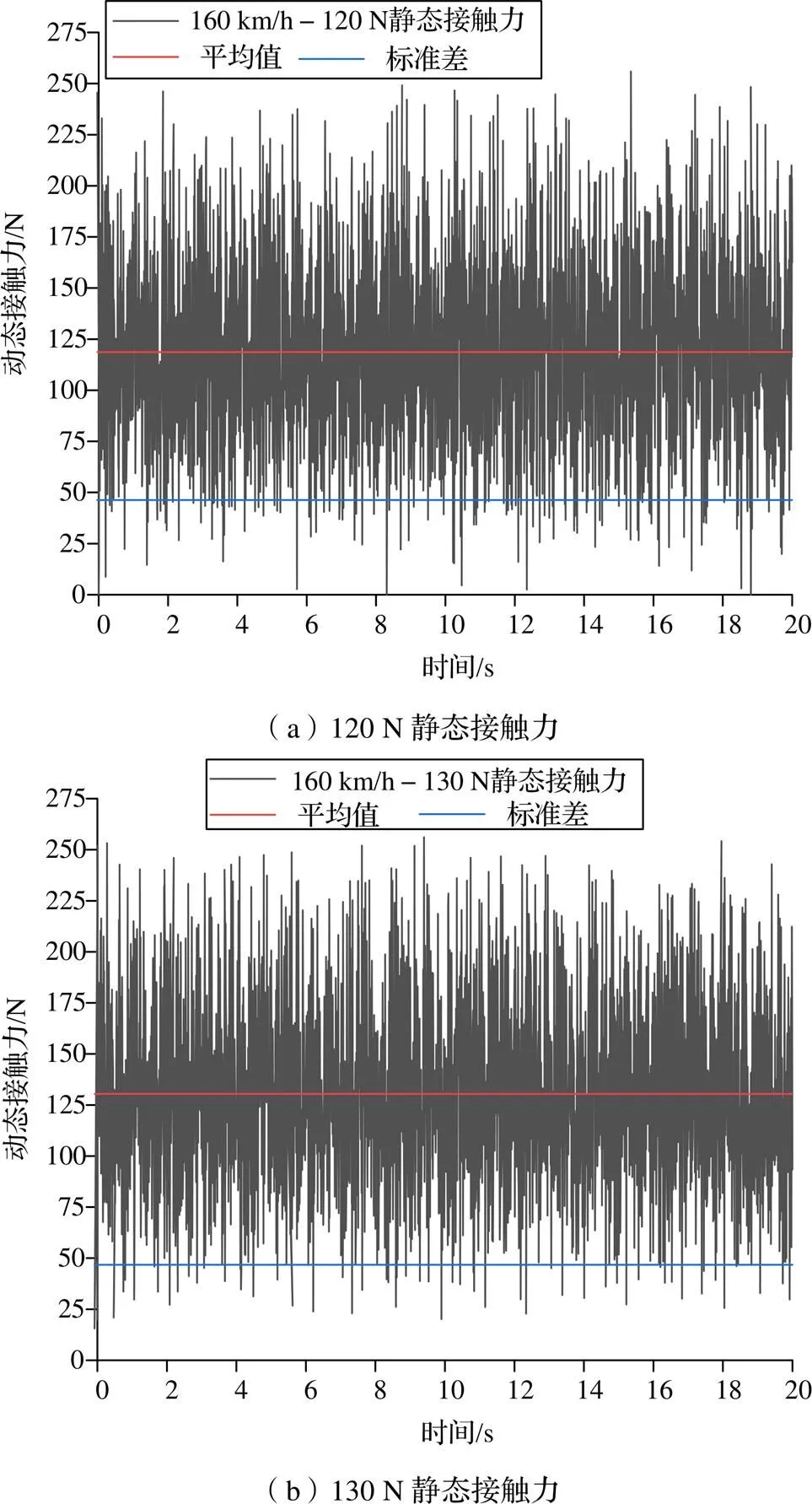
圖13 160 km/h-動態(tài)接觸力
圖14為180 km/h速度工況下的仿真結(jié)果。從圖14(a)可以看出,當(dāng)中速磁浮車輛運行速度為180 km/h時,若靴軌間靜態(tài)接觸力設(shè)置為130 N,則會發(fā)生離線現(xiàn)象。由圖14(b)可知,當(dāng)靜態(tài)接觸力增加到140 N時,動態(tài)接觸力均大于0,表明受流器能夠穩(wěn)定工作。
圖15為200km/h速度工況下的仿真結(jié)果。從圖15(a)可以看出,當(dāng)中速磁浮車輛運行速度為200 km/h時,若靴軌間靜態(tài)接觸力設(shè)置為140 N,則會出現(xiàn)發(fā)生離線現(xiàn)象。由圖15(b)可知,當(dāng)靜態(tài)接觸力增加到150 N時,動態(tài)接觸力均大于0,表明受流器能夠穩(wěn)定工作。
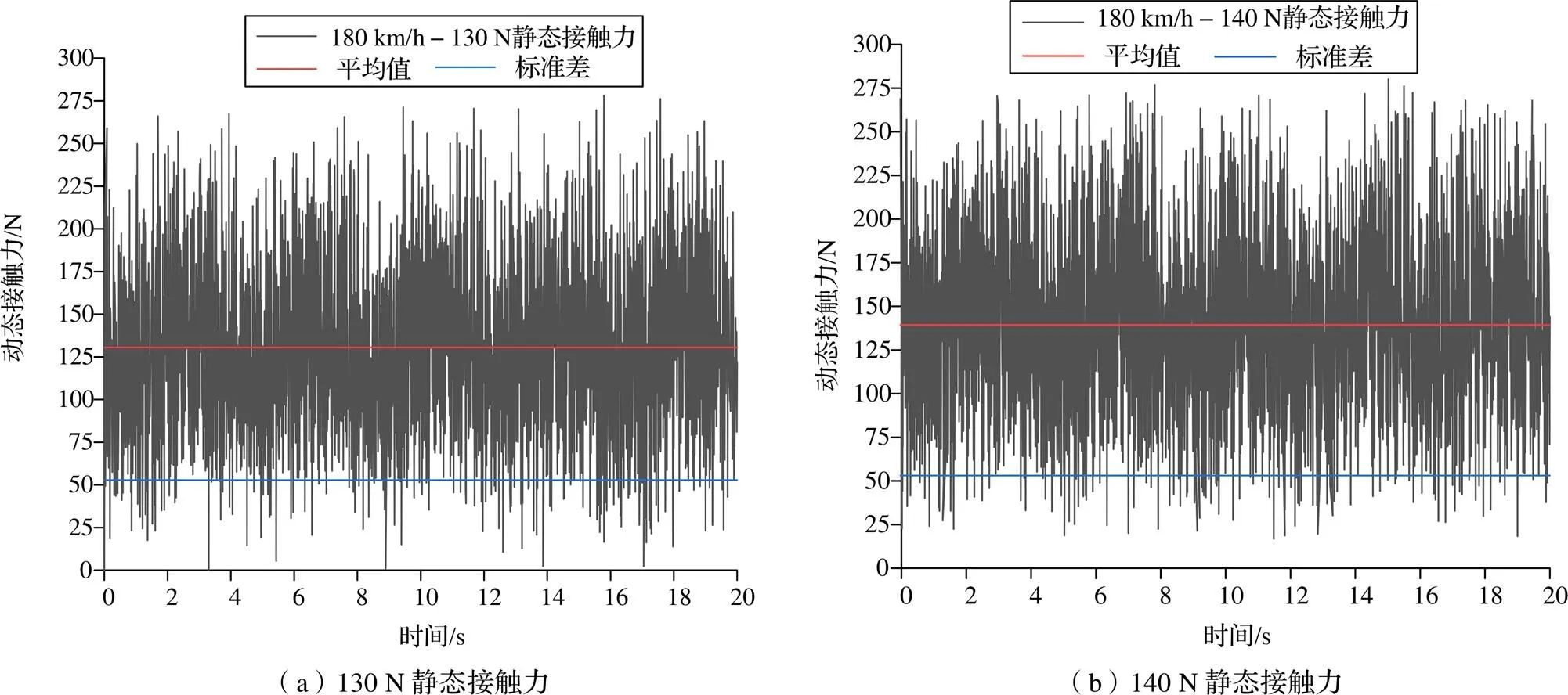
圖14 180 km/h-動態(tài)接觸力
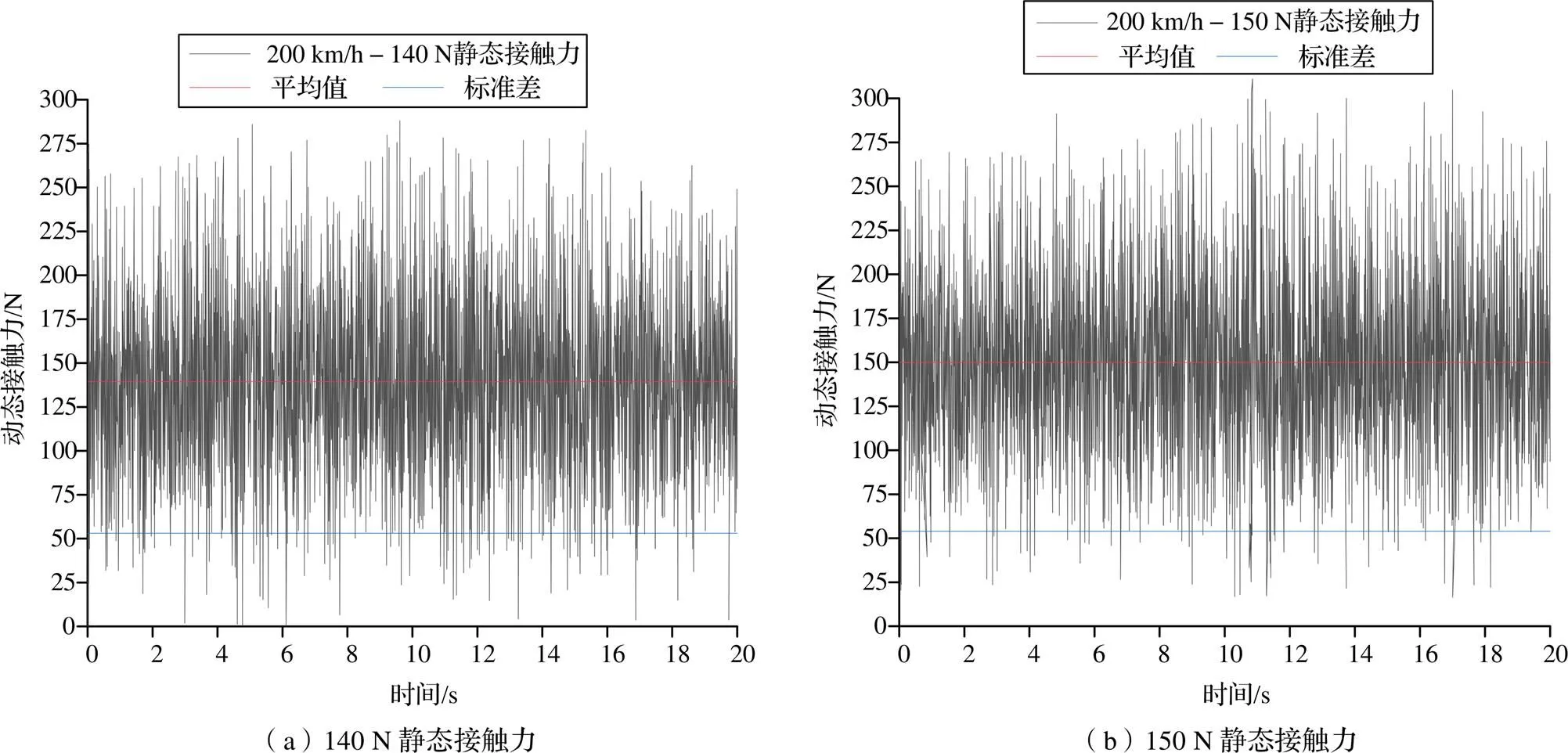
圖15 200 km/h-動態(tài)接觸力
圖16為3種速度工況、不同靜態(tài)接觸力下,動態(tài)接觸力的平均值以及標準差的對比結(jié)果。從圖16可以看出,隨著中速磁浮車輛運行速度的增大,要保證受流器能夠正常工作,即靴軌間動態(tài)接觸力始終大于0,靜態(tài)接觸力也應(yīng)該設(shè)置的更大,但在160~200 km/h運行速度下,彈簧力預(yù)設(shè)值均在其靜態(tài)壓力調(diào)節(jié)范圍內(nèi)。而與之伴隨的是,動態(tài)接觸力平均值以及動態(tài)標準差也呈現(xiàn)增大的趨勢,表明受流器在該速度工況下運行時,動態(tài)接觸力波動增大,有加劇受流器滑靴磨耗的風(fēng)險。
4 結(jié)論
基于6懸浮架空簧中置式新型中速磁浮車輛,針對160~200km/h運行速度下受流器運行狀態(tài),進行了共計6組動力學(xué)仿真,從靴軌間動態(tài)接觸力方面對受流器受流質(zhì)量進行評估,結(jié)果表明受流器能夠匹配該速度運行,所得主要結(jié)論如下:
(1)6懸浮架空簧中置式新型中速磁浮車輛在100~200 km/h速度工況下,其橫向以及垂向平穩(wěn)性指標均不超過2.5,屬于優(yōu)秀等級。
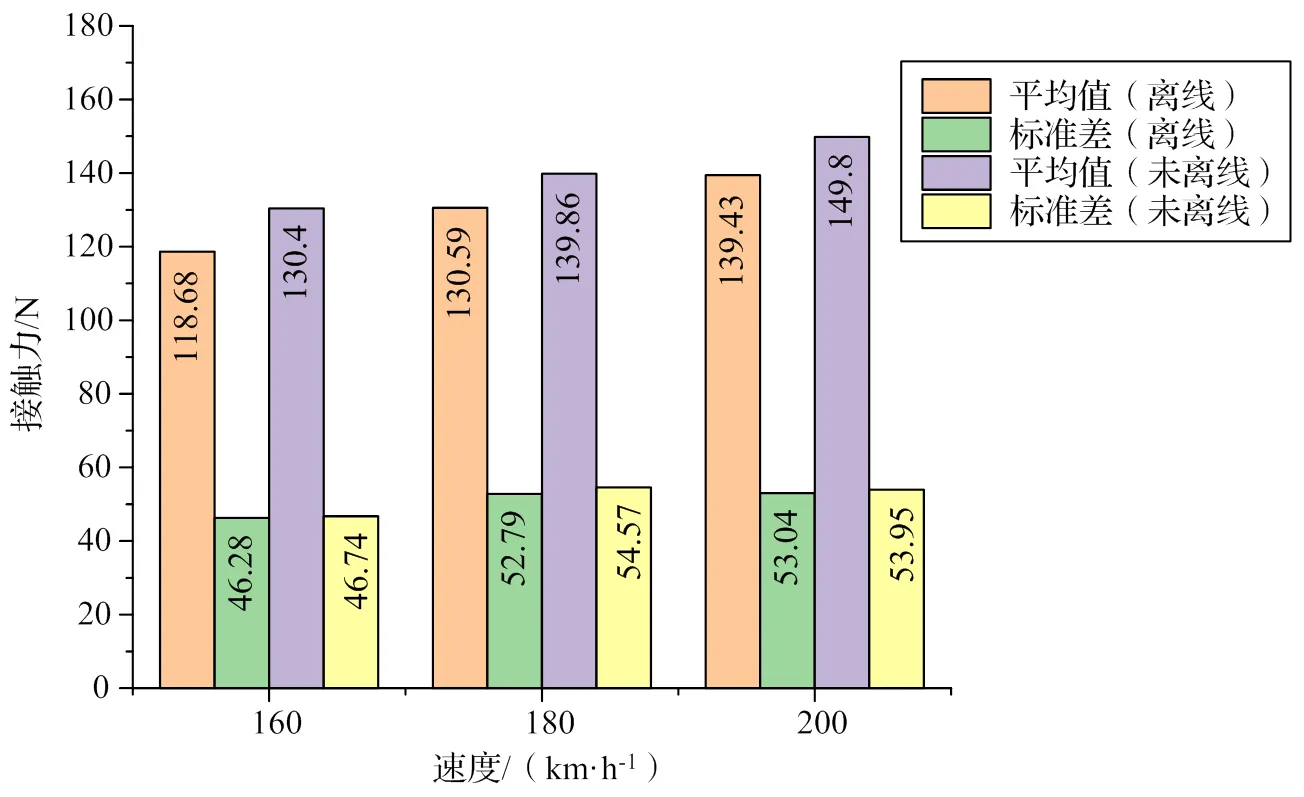
圖16 動態(tài)接觸力對比結(jié)果
(2)在160~200 km/h運行速度下,2R-F受流器安裝位置點的橫向及垂向位移均隨車輛運行速度的增大而增大。
(3)在本文中所設(shè)的工況下,當(dāng)考慮車輛運行對受流器工作影響時,要使受流器能夠在160 km/h速度下穩(wěn)定工作,靜態(tài)接觸力設(shè)置數(shù)值應(yīng)不低于130N,在180 km/h速度下,靜態(tài)接觸力設(shè)置數(shù)值應(yīng)不低于140 N,在200 km/h速度下,靜態(tài)接觸力設(shè)置數(shù)值應(yīng)不低于150 N。
[1]Yaghoubi H,Ziari H. Development of a Maglev Vehicle/ Guideway System Interaction Model and Comparison of the Guideway Structural Analysis with Railway Bridge Structures[J]. American Society of Civil Engineers,2011,137(2):140-154.
[2]Fujiwara O,Wang J,Ishimoto S. Environment Impact Assessment on the Tobu-Kyuryo-Line( HSST System ) in Japan[C]. Proceedings of the 18th International Conference on Magnetically Levitated Systems and Linear Drives Maglev. Atsugi,2004:632-635.
[3]陳屹. 城市軌道交通四軌供電方式的探討[J]. 電氣化鐵道,2010(2):49-50.
[4]Stewart E,Weston P,Hillmansen S,et al. Using Bogie-Mounted Sensors to Understand the Dynamics of Third Rail Current Collection Systems. Proceedings of the Institution of Mechanical Engineers,Part F: Journal of Rail and Rapid Transit,2011,225(2):219-227.
[5]李寧,陳革. 常導(dǎo)中低速磁懸浮列車受流方式選擇及受流器結(jié)構(gòu)設(shè)計[J]. 電力機車與城軌車輛,2007(2):14-15,19.
[6]宋偉. 接觸軌安裝精度對中低速磁浮列車受流的影響[J]. 電氣化鐵道,2014(5):33-35.
[7]陳明國,周潔,白雪. 中低速磁懸浮列車受流器研制[J]. 機車電傳動,2015(5): 29-32.
[8]劉銘. 160km/h磁浮列車靴軌系統(tǒng)動力學(xué)研究[D]. 成都:西南交通大學(xué),2018.
[9]張鵬飛. 中低速磁浮列車靴軌系統(tǒng)優(yōu)化[D]. 成都:西南交通大學(xué),2018.
[10]彭寶林,歷洋. 160 km/h速度等級磁浮列車受流器研究[J]. 機電信息,2019(11):13-15.
[11]向梟笛,羅湘萍,宮政,等. 準高速條件下三軌受流器靴軌動態(tài)接觸分析[J]. 機械工程學(xué)報,2020,56(20):185-194.
[12]王波,羅世輝,汪科任,等. 不同磁軌關(guān)系對中低速磁浮車輛垂向動力學(xué)性能的影響[J]. 機車電傳動,2019,82(5):82-86.
[13]國家市場監(jiān)督管理總局,國家標準化管理委員會. 機車車輛動力學(xué)性能評定及試驗鑒定規(guī)范:GB/T 5599-2019 [S]. 北京:中國標準出版社,2019.
[14]Xu H P,Liu Y Z,Xie X L,et al. Simulation Study on Dynamic Current Collection Characteristics of the System of Collector Shoe and Conduct Rail of Medium Speed Maglev Train[C]. Hangzhou:Chinese Automation Congress (CAC),2019.
Dynamic Study on Current Collecting System of Medium Speed Maglev at 160~200km/h
ZHOU Ce,LUO Shihui,MA Weihua
(State Key Laboratory of Traction Power, Southwest Jiaotong University, Chengdu 610031, China)
In order to study the operating status of the medium speed maglev current collector at 160~200 km/h speed grades, a new type of medium speed maglev vehicle dynamic model with 134 degrees of freedom was established by using SIMPACK software. The vibration response of the installation position of the right front current collector was calculated respectively at 160 km/h, 180km/h and 200 km/h. The vibration response was then imported as an external excitation into the current collector-power rail (shoe-gear rail) dynamic model, and the static contact force was preset to 120 N, 130 N, 130 N, 140 N, 140 N, 150 N at the three speeds. The results showed that in order to have the current collector work stably at this speed, the preset static contact force should not be less than 130 N, 140 N, and 150 N respectively.
new type medium speed maglev;current collector;dynamic simulation;contact force
U270.1+1
A
10.3969/j.issn.1006-0316.2021.08.005
1006-0316 (2021) 08-0029-08
2021-01-12
2019河南省軌道交通智能安全工程技術(shù)研究中心開放基金(2019KFJJ002);中鐵二院工程集團有限責(zé)任公司科學(xué)技術(shù)研究計劃資助(KYY2017053(17-20))
周策(1994-),男,河北石家莊人,碩士研究生,主要研究方向為磁浮列車系統(tǒng)動力學(xué),E-mail:ssx3514@163.com。