Multisim13仿真軟件在觸發(fā)器中的應(yīng)用分析
2021-09-08 01:01:00張學(xué)文司佑全
張學(xué)文,司佑全
( 湖北師范大學(xué) 物理與電子科學(xué)學(xué)院,湖北 黃石 435002)
0 引言

文獻(xiàn)[1]從理論上對(duì)基本RS觸發(fā)器和同步RS觸發(fā)器的“不確定狀態(tài)”進(jìn)行了分析與實(shí)驗(yàn)驗(yàn)證,文獻(xiàn)[2~4]依據(jù)與非門(mén)的邏輯關(guān)系并考慮門(mén)的延遲時(shí)間,分析了基本RS觸發(fā)器“不確定狀態(tài)”,文獻(xiàn)[5]給出了具有置0、置1功能及“不確定狀態(tài)”的同步RS觸發(fā)器的Multisim仿真方法。
上述文獻(xiàn)[1]~[6]對(duì)基本RS觸發(fā)器和同步RS觸發(fā)器中的一種或者兩種的“不確定狀態(tài)”進(jìn)行了分析,本文在對(duì)這兩種電路進(jìn)行分析的基礎(chǔ)上,還對(duì)主從RS觸發(fā)器、主從JK觸發(fā)器進(jìn)行了分析,并利用Multisim13仿真軟件中的字信號(hào)發(fā)生器輸入信號(hào),四蹤示波器同時(shí)觀察輸入和輸出波形,找到“不確定狀態(tài)”,對(duì)其產(chǎn)生的原因進(jìn)行分析,將理論分析與仿真分析相結(jié)合,為電路設(shè)計(jì)提供參考。此工作解決了觸發(fā)器的工作波形無(wú)法用實(shí)驗(yàn)儀器進(jìn)行分析驗(yàn)證的問(wèn)題,同時(shí)對(duì)四種電路進(jìn)行仿真分析,進(jìn)一步完善了從基本RS觸發(fā)器→同步RS觸發(fā)器→主從RS觸發(fā)器→主從JK觸發(fā)器的電路改進(jìn)過(guò)程。其結(jié)果表明:只有觸發(fā)器特性方程沒(méi)有約束條件時(shí),才不會(huì)出現(xiàn)“不確定狀態(tài)”,由此從本質(zhì)上解釋了“不確定狀態(tài)”特性。
1 RS觸發(fā)器的不確定狀態(tài)
將兩個(gè)與非門(mén)交叉連接構(gòu)成圖1所示的基本RS觸發(fā)器。其邏輯功能如表1所示[1]。

表1 與非門(mén)構(gòu)成RS觸發(fā)器的功能表
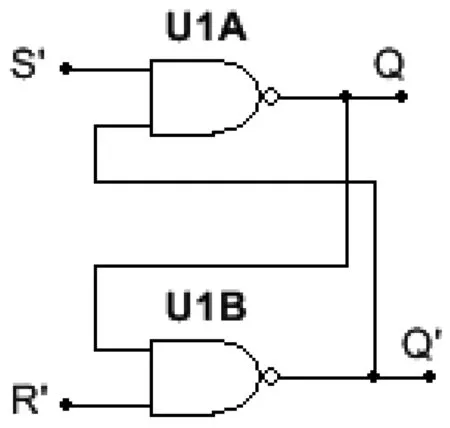
圖1 與非門(mén)構(gòu)成的RS觸發(fā)器
對(duì)于“不確定狀態(tài)”,學(xué)生理解起來(lái)比較困難,實(shí)驗(yàn)也沒(méi)法觀察到。利用Multisim13仿真軟件在四蹤示波器上可以很清晰地觀察到非定義狀態(tài)的狀態(tài)變化。同時(shí)也較好地解釋了為什么基本RS觸發(fā)器的輸入信號(hào)需要遵守SR=0的條件。

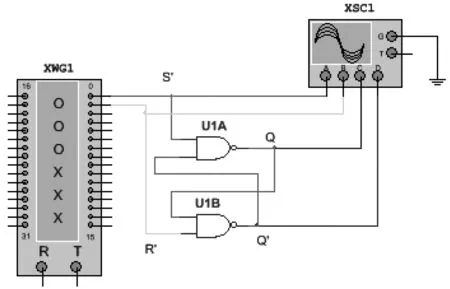
圖2 基本RS觸發(fā)器仿真電路
實(shí)際電路中門(mén)電路的延遲時(shí)間不可控,而在Multisim13中可以改變單個(gè)門(mén)電路的延遲時(shí)間,當(dāng)U1A、U1B延遲時(shí)間不同,而且是確定的, RS觸發(fā)器的輸出狀態(tài)就可以確定。

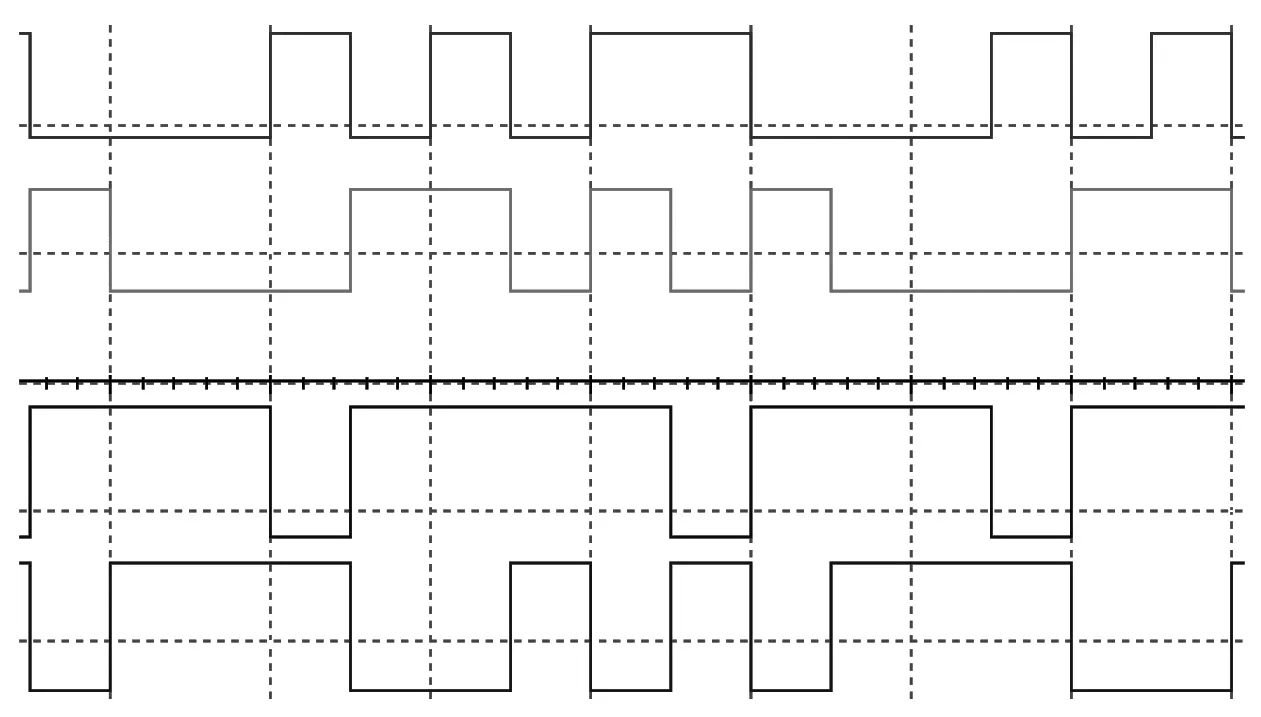
圖4 示波器觀察基本RS觸發(fā)器輸出情況(U1A延遲時(shí)間長(zhǎng))
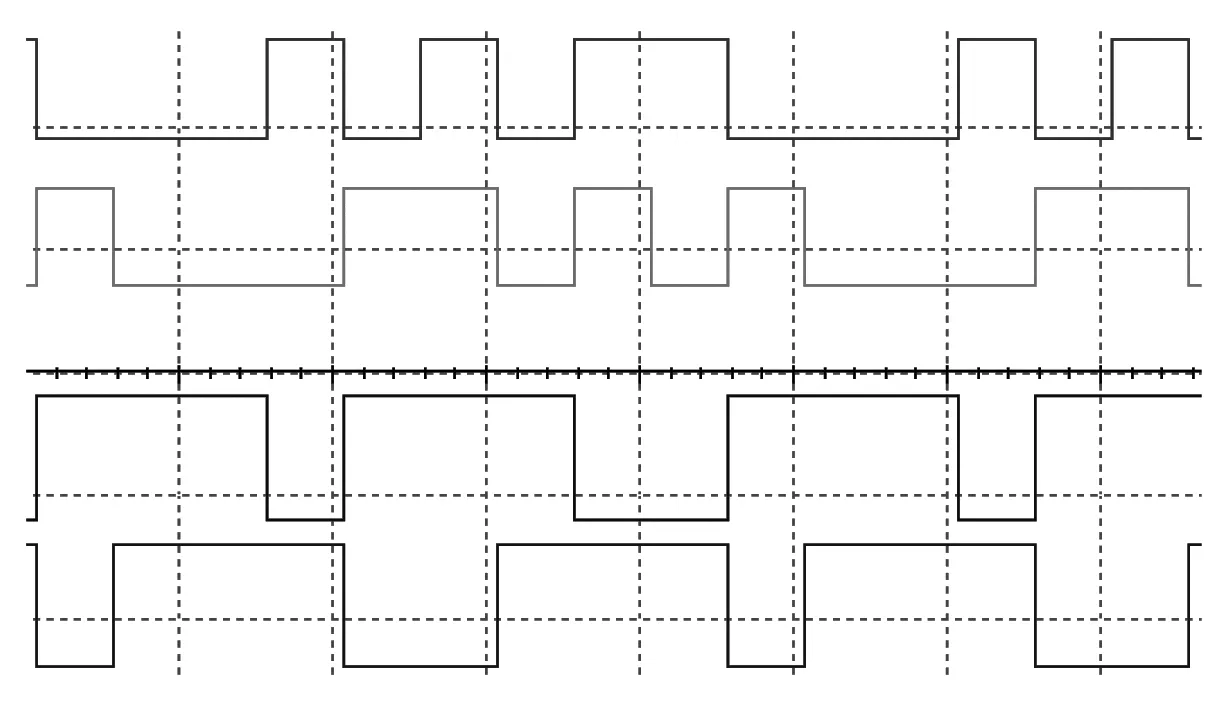
圖5 示波器觀察基本RS觸發(fā)器輸出情況(U1B延遲時(shí)間長(zhǎng))


2 同步RS觸發(fā)器的“不確定狀態(tài)”
RS觸發(fā)器輸入信號(hào)存在競(jìng)爭(zhēng),容易冒險(xiǎn);輸出受輸入信號(hào)直接控制,噪聲可以直接改變輸出,RS觸發(fā)器無(wú)法區(qū)分輸入是信號(hào)還是噪聲,無(wú)法處理干擾。所以需要對(duì)兩個(gè)輸入信號(hào)進(jìn)行預(yù)處理。
在電平觸發(fā)的觸發(fā)器電路中,除了置1、置0輸入端外,增加了一個(gè)觸發(fā)信號(hào)輸入端CLK.只有CLK有效,觸發(fā)器才能置1、置0[3]。在時(shí)鐘CLK=1期間接收S、R輸入信號(hào)并改變狀態(tài), 在CLK的其他期間狀態(tài)不變。如圖6所示。
四蹤示波器A、B、C、D分別接CLK、S、R、Q,從上至下,依次觀察到的波形如圖7所示。
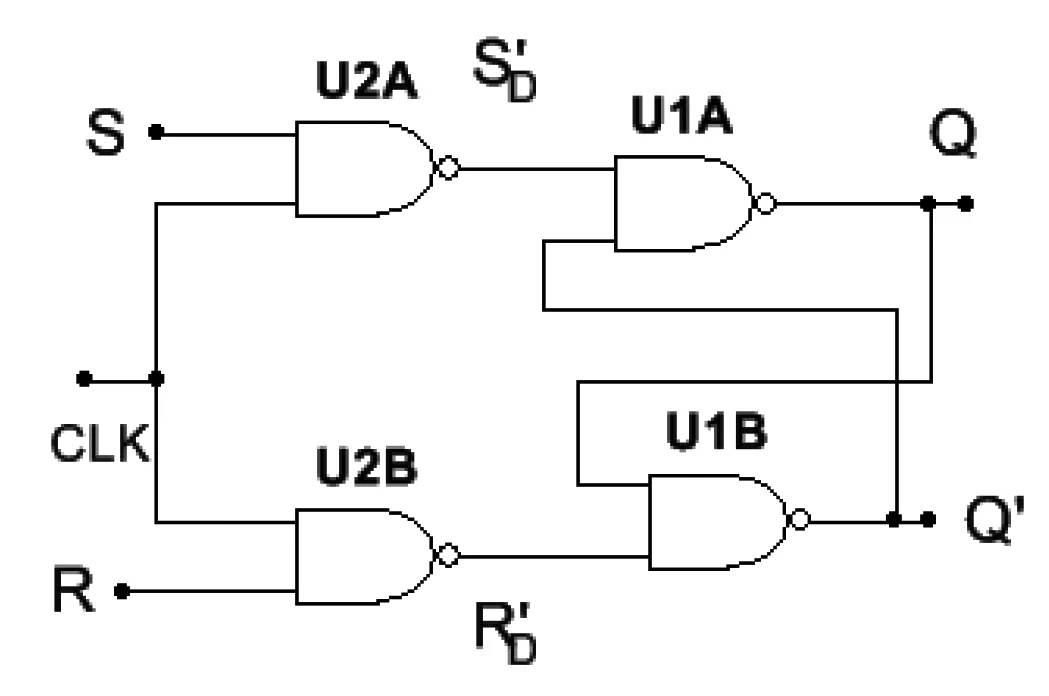
圖6 同步RS觸發(fā)器電路
字信號(hào)發(fā)生器設(shè)置為00→01→02→03→00→03→01→02→00之間循環(huán),其輸出端接入同步RS觸發(fā)器的輸入端S、R,CLK,接時(shí)鐘脈沖,四蹤示波器A、B、C、D分別接CLK、S、R、Q,從上至下,依次觀察到的波形如圖7所示。
從圖7中可以看到,情形1:S=R=1,CLK從高電平變?yōu)榈碗娖剑磺樾?:CLK為高電平,S、R同時(shí)由1變?yōu)?.這兩個(gè)時(shí)刻會(huì)出現(xiàn)Q不斷地在0,1之間變化;情形1:對(duì)應(yīng)圖7中看到的左邊和右邊紫色的區(qū)域;情形2:對(duì)應(yīng)中間的一塊紫色區(qū)域。同步RS觸發(fā)器可以利用CLK進(jìn)行選通控制,抗干擾能力有所提升,但觸發(fā)方式仍然是電平觸發(fā),存在空翻現(xiàn)象[5]。
3 主從RS觸發(fā)器的“不確定狀態(tài)”
字信號(hào)發(fā)生器設(shè)置為00→01→02→03→00→03→01→02→00之間循環(huán),其輸出端接入同步RS觸發(fā)器的輸入端S、R,CLK接時(shí)鐘脈沖,四蹤示波器A、B、C、D分別接CLK、S、R、Q,從上至下,依次觀察到的波形如圖8、圖9所示。
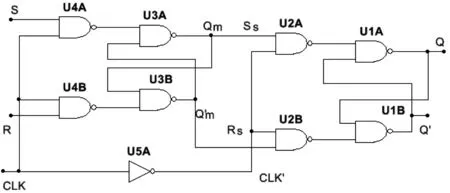
圖8 主從RS觸發(fā)器電路
從圖9中可以看到當(dāng)S=R=1,CLK從高電平變?yōu)榈碗娖降臅r(shí)刻開(kāi)始一直到下一個(gè)下降沿脈沖到來(lái)(一個(gè)CLK的變化周期),Q不斷地在0,1之間變化,圖7中看到的一塊紫色區(qū)域,就是主從RS觸發(fā)器的“不確定狀態(tài)”。主從RS觸發(fā)器是脈沖觸發(fā)。
4 主從JK觸發(fā)器
字信號(hào)發(fā)生器設(shè)置為00→01→02→03→00→03→01→02→00之間循環(huán),其輸出端接入主從JK觸發(fā)器的輸入端J、K,CLK接時(shí)鐘脈沖,四蹤示波器A、B、C、D分別接CLK、J、K、Q,從上至下,依次觀察到的波形如圖10、圖11所示。
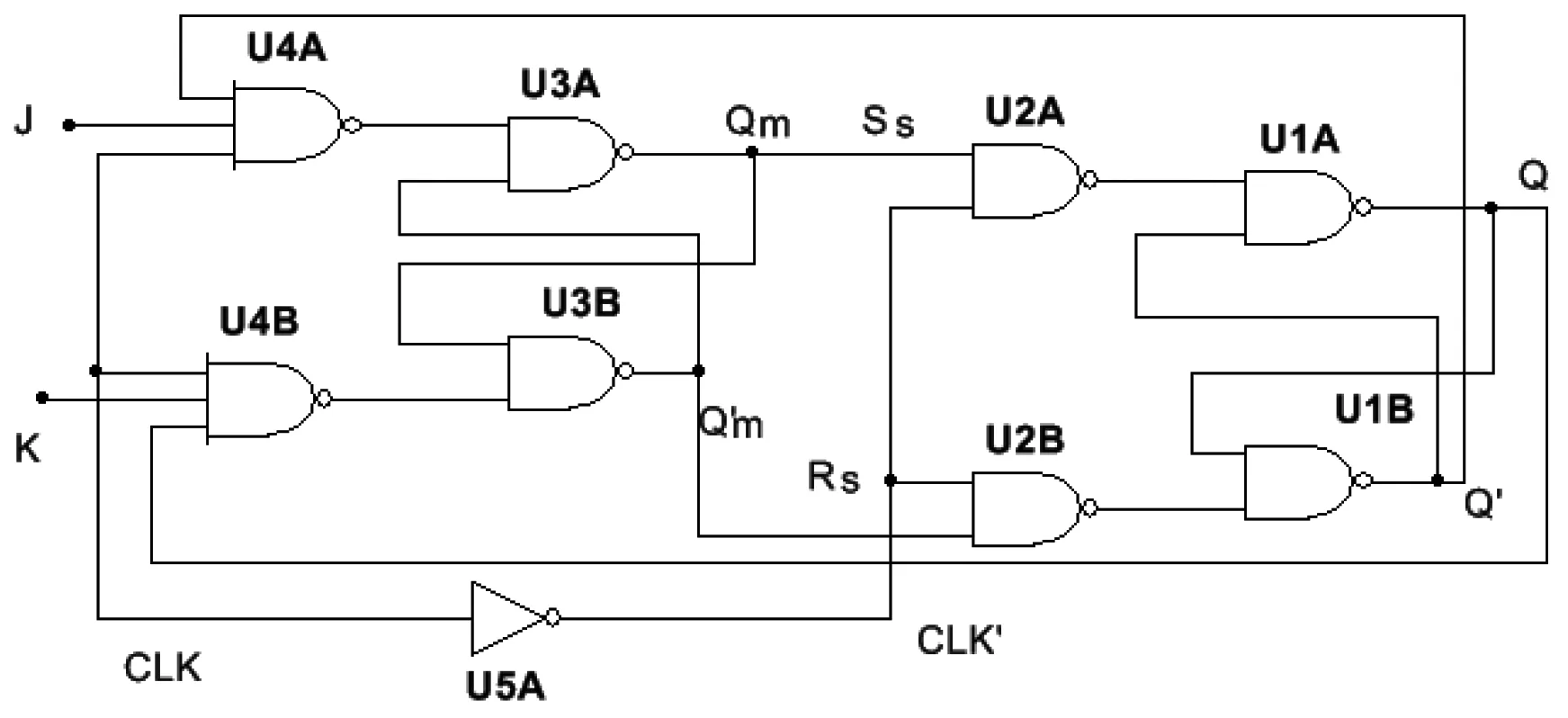
圖10 主從JK觸發(fā)器電路
5 總結(jié)
通過(guò)Multisim13仿真軟件中的四蹤示波器顯示輸入信號(hào)及狀態(tài)輸出信號(hào)的波形,對(duì)時(shí)序波形進(jìn)行分析,觀察基本RS觸發(fā)器、同步RS觸發(fā)器、主從RS觸發(fā)器中 “不確定狀態(tài)”發(fā)生的時(shí)間段,得到:
2)對(duì)同步RS觸發(fā)器,當(dāng)CLK為高電平S、R同時(shí)從1變?yōu)?,或者S=R=1,CLK從高電平變?yōu)榈碗娖剑紩?huì)出現(xiàn)“不確定狀態(tài)”。
3)對(duì)主從RS觸發(fā)器,當(dāng)S=R=1,CLK從高電平變?yōu)榈碗娖降臅r(shí)刻開(kāi)始一直到下一個(gè)下降沿脈沖到來(lái)(一個(gè)CLK的變化周期),輸出端出現(xiàn)“不確定狀態(tài)”。
觸發(fā)器特性方程如果有約束條件,當(dāng)輸入信號(hào)不滿(mǎn)足約束條件時(shí),輸出端可能會(huì)出現(xiàn)“不確定狀態(tài)”。只有觸發(fā)器特性方程沒(méi)有約束條件時(shí),才不會(huì)出現(xiàn)“不確定狀態(tài)”。
同步RS觸發(fā)器存在不確定狀態(tài)和空翻,主從RS觸發(fā)器克服了空翻,JK觸發(fā)器解決了RS觸發(fā)器存在不確定狀態(tài)的問(wèn)題。通過(guò)比較分析,電路逐步改進(jìn)過(guò)程,弄清不同電路結(jié)構(gòu)觸發(fā)器的動(dòng)作特點(diǎn)和規(guī)律,特別是出現(xiàn)“不確定狀態(tài)”的條件, 對(duì)理解和分析其它觸發(fā)器及整個(gè)時(shí)序電路都有重要的借鑒作用,同時(shí)對(duì)特殊時(shí)序電路設(shè)計(jì)出現(xiàn)同類(lèi)問(wèn)題時(shí)的解決具有一定的參考作用。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
民用飛機(jī)設(shè)計(jì)與研究(2020年4期)2021-01-21 09:15:02
考試與評(píng)價(jià)·高一版(2020年6期)2020-11-02 02:45:24
中國(guó)生殖健康(2019年3期)2019-02-01 06:12:26
電子制作(2018年18期)2018-11-14 01:48:24
山東工業(yè)技術(shù)(2016年15期)2016-12-01 05:31:22
鑿巖機(jī)械氣動(dòng)工具(2016年3期)2016-03-01 04:00:25
海軍航空大學(xué)學(xué)報(bào)(2015年3期)2015-11-11 17:20:00
中國(guó)中醫(yī)藥現(xiàn)代遠(yuǎn)程教育(2014年11期)2014-08-08 13:23:44
終身教育研究(2014年5期)2014-02-28 01:23:06