基于ADAMS 軟件對干法成形多層組合式連續球磨機粗磨系統的仿真與運動學分析
2021-09-09 07:03:48黃佳雯易嘉琦李汶潔方永振
中國陶瓷工業 2021年4期
黃佳雯,易嘉琦,李汶潔,方永振
(1.景德鎮學院 機械電子工程學院,江西 景德鎮 333400;2.景德鎮陶瓷大學 機械電子工程學院,江西 景德鎮 333403)
0 引言
建筑陶瓷工業一直以來都有高污染、高能耗、低效率等問題,是“三高一低”行業的典型代表[1-3]。原料制備車間是“三高一低”的主要集中點。球磨機是陶瓷原料制備車間中對物料進行粉碎處理的主要設備。其球磨性能的好壞對陶瓷產品的質量有著非常大的影響[4-6]。為有效改善球磨機性能,提高研磨效率,設計了多層組合式連續球磨機,并借助ADAMS 軟件對其進行運動仿真與運動學分析,對其性能進行優化。
ADAMS 軟件以其強悍的“功能化數字樣機”技術,在工程設計計算機輔助工程中占有一席之地,是應用行業廣的機械系統仿真軟件[7]。ADAMS可以建立復雜機械系統的“虛擬樣機”,可模擬現實工作環境下所有運動情況。對系統的各種運動學性能進行有效的評估,并可快速分析和比較多種設計思想,得到最優設計方案,提高產品性能與產品設計水平[8-9]。張楠等[10]借助ADAMS 對多連桿機構和一般曲柄滑塊機構的運動學及動力學分析作對比,闡述了微型壓力機多連桿機構滑塊的位移、速度、加速度及鉸接點的受力情況相較于一般曲柄滑塊機構的不同特性。寧德倫等[11]運用ADAMS 虛擬樣機技術模擬某輪式裝備鐵路運輸緊急制動的過程。同時結合現場實測數據,對模擬仿真結果進行定性與定量的分析。通過分析結果得出仿真實驗結果有效的結論。吳同一等[12]利用ADAMS 軟件建立多連桿機構模型,仿真了多連桿機構滑塊的位移,速度及加速度曲線以及各個鉸支點的受力狀況,再將其與手工計算值相比較,得出了小型快速壓力機滑塊運動特性。
基于上述運用ADAMS 軟件研究基礎,借助ADAMS 的運動仿真對多層組合式連續球磨機粗磨系統進行運動學仿真與運動學分析,對其進行優化分析,驗證多層組合式連續球磨粗磨系統工藝設計的合理性。
1 多層組合式連續球磨機
多層組合式連續球磨機球體采用多層滾筒結構,共分為三個系統——粗磨系統、細磨系統和超細磨系統。料漿依次經過粗磨系統、細磨系統和超細磨系統研磨。三個系統借助齒輪傳動方式實現差速運動。多層組合式連續球磨機示意圖如圖1 所示。

圖1 多層組合式連續球磨機示意圖Fig.1 Schematic diagram of multi-layer combined continuous ball mill
2 多層組合式連續球磨機運動模型建立
2.1 建立運動模型
借助UG 三維建模軟件對多層組合式連續球磨機進行三維實體建模,并將其導入ADAMS 軟件,建立多層組合式連續球磨機運動模型,如圖2所示。
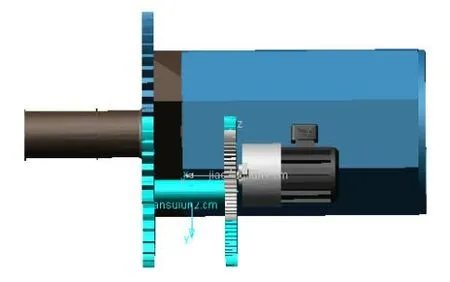
圖2 多層組合式連續球磨機粗磨系統運動模型Fig.2 Motion model of coarse grinding system of multilayer combined continuous ball mill
2.2 施加運動副
為保證對多層組合式連續球磨機粗磨系統運動準確仿真,根據該粗磨系統的結構設計,完成對運動模型運動副的施加。通過對多層組合式連續球磨機粗磨系統結構進行分析,該運動模型包括有5 個固定副、3 個旋轉副。首先,提取ADAMS軟件約束庫中的固定副(Joint:Fixed),在粗磨電機輸出軸與粗磨小齒輪、減速器小齒輪與軸、減速器大齒輪與軸、粗磨倉與左連接件、粗磨大齒輪與左連接件之間施加固定副。接著提取ADAMS軟件約束庫中的旋轉副(Joint:Revolute),在粗磨桶與地面(ground)、粗磨電機輸出軸與地面、減速器軸與地面之間施加旋轉運動副。該多層組合式連續球磨機粗磨系統齒輪傳動較為復雜。為保證仿真的準確性,需在粗磨小齒輪與減速器小齒輪、減速器大齒輪與粗磨大齒輪之間添加接觸力。為避免重力對運動模型仿真結果的影響,需將重力(Gravity)關閉。多層組合式連續球磨機粗磨系統運動模型的運動副施加完成,含運動副的多層組合式連續球磨機粗磨系統運動模型如圖3 所示。

圖3 含運動副的多層組合式連續球磨機粗磨系統運動模型Fig.3 Motion model of rough grinding system of multilayer combined continuous ball mill with kinematic pair(a) front view;(b) left view
2.3 建立運動驅動
在該多層組合式連續球磨機粗磨系統中,粗磨電機為整個系統的動力源。故在該運動模型中,確定粗磨電機輸出軸為原動件,提取ADAMS 軟件約束庫中的旋轉驅動(Rotational Joint Motion)工具,在粗磨電機輸出軸與地面之間的旋轉運動副上完成旋轉驅動的建立。根據多層組合式連續球磨機智能裝粗磨系統運動特點及設計要求,對旋轉驅動參數進行設置,將旋轉驅動作用函數設置為240d* time,即該驅動角速度為240°/s。該多層組合式連續球磨機粗磨系統運動模型的運動驅動施加完成。含運動驅動多層組合式連續球磨機粗磨系統運動模型如圖4 所示。
3 運動仿真與運動學分析
3.1 運動仿真
借助ADAMS 軟件對已建立的多層組合式連續球磨機粗磨系統運動模型進行運動仿真。點擊仿真工具,對運動仿真參數進行設置。設置仿真終止時間(End Time)為10 s,仿真工作步數(Work Steps)為1000,然后點擊“開始仿真”按鈕。完成多層組合式連續球磨機粗磨系統運動模型的運動仿真,對該多層組合式連續球磨機粗磨系統運動模型進行運動學分析。
3.2 運動學分析
借助ADAMS 軟件的運動學分析功能,使用測量(Measures)工具,對該多層組合式連續球磨機粗磨系統運動模型進行運動學分析。分析粗磨桶內壁面一A 點相對于地面上一點B 的位移、速度以及加速度隨時間變化規律,得到位移、速度、加速度隨時間變化規律曲線圖。
(1)位移曲線圖
由圖5 位移曲線圖可知:該圖為粗磨倉內部一A 點相對于地面上一B 點的位移在10 s 的運動仿真時間內位移隨時間變化規律曲線圖。在T=4.0 s、T=5.2 s、T=6.0 s、T=7.0 s、T=7.8 s、T=8.0 s等時刻,位移曲線圖存在不同程度的突變。但并不影響A、B 兩點的位移隨著時間變化的總體趨勢。在10 s 的運動仿真時間內,位移A、B 兩點的位移隨著時間呈現周期性變化,其周期約為1.5 s。在T=0 s 時A、B 兩點相對位移為170 mm。在T=0.2 s、T=1.7 s、T=3.1 s、T=4.4 s、T=5.8 s、T=7.0 s、T=9.2 s 時,A、B 兩點相對位移均處于最小值為53.0 mm。在T=1.0 s、T=2.5 s、T=3.5 s、T=5.0 s、T=6.8 s、T=8.4 s、T=9.5 s 時,A、B 兩點相對位移處于最大值,為265.0 mm。在一個周期內,A、B 兩點相對位移最小值約為53.0 mm,最大值約為265.0 mm,且只存在一個最小值點和一個最大值點。該結果與多層組合式連續球磨機粗磨系統工藝設計要求相吻合。

圖5 位移曲線圖Fig.5 Displacement curve
(2)速度曲線圖
由圖6 速度曲線圖可知:該圖為粗磨桶內壁面一A 點相對于地面上一B 點的速度在10 s 的運動仿真時間內,速度隨時間變化規律曲線圖。T=0-10.0 s 時間段內,速度曲線圖為一直線,始終為一恒定值230.5 mm/s。由此可得,A 點相對于B點的速度不隨時間發生變化,粗磨桶的運動情況為勻速旋轉。該結果與多層組合式連續球磨機粗磨系統工藝設計要求相吻合。

圖6 速度曲線圖Fig.6 Velocity curve
(3)加速度曲線圖
由圖7 加速度曲線圖可知:該圖為粗磨桶內部一A 點相對于地面上一B 點的加速度在10 s 的運動仿真時間內,加速度隨時間變化規律曲線圖。在仿真時間為6 s 之前,加速度曲線僅出現少數幾個波動粉小峰,加速度未發生較大的波動,變化不顯著。在T=6-10 s 時間段內,加速度曲線出現多個峰值,且峰值點較大,尤其在T=6.1 s、T=7.5 s 與T=9.9 s 三個時刻,加速度突變較為顯著,變化較大。在該仿真時間內,加速度存在突變,但突變的值較小,對粗磨桶的速度幾乎不存在影響。且在絕大部分時間段加速度值為0,該加速度曲線圖與速度曲線圖結果大體相符。由此可得,A 點相對于B點的加速度隨時間僅發生少許十分微小的變化,絕大部分時間加速度的值為0。該結果與多層組合式連續球磨機粗磨系統工藝設計要求相吻合。
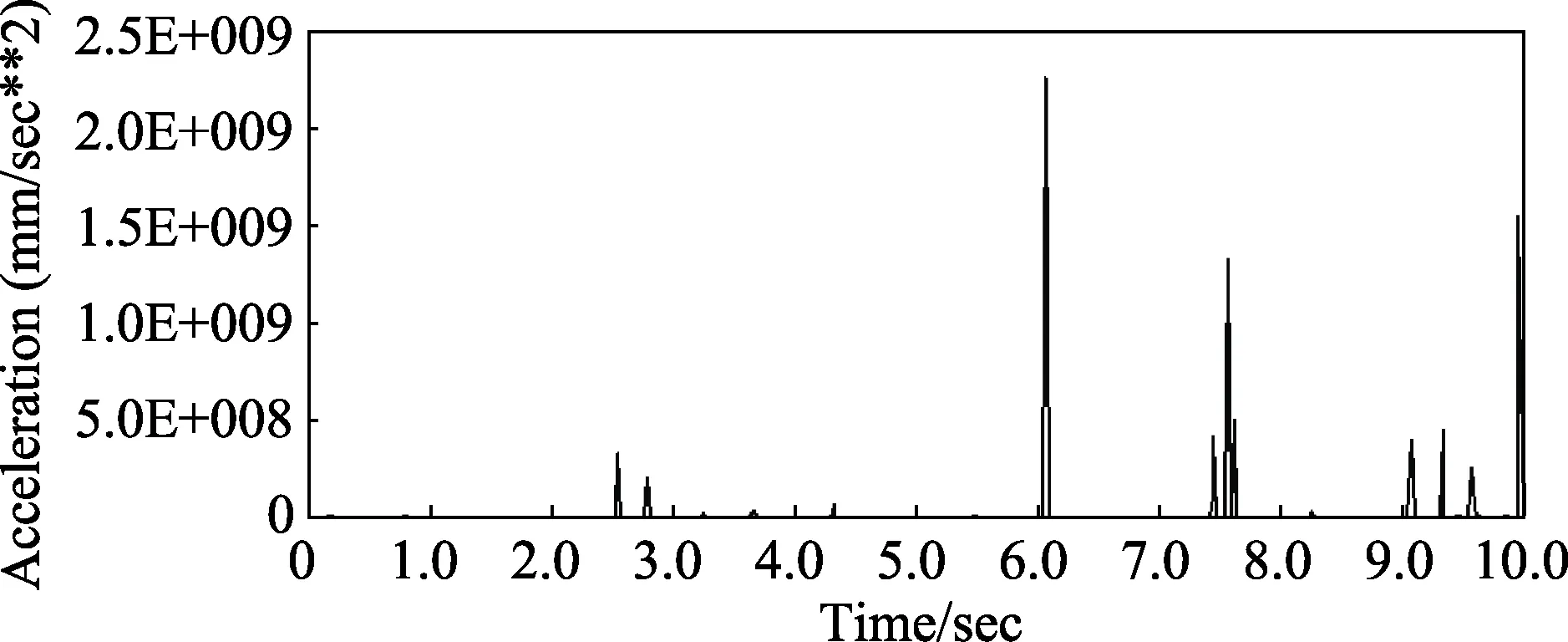
圖7 加速度曲線圖Fig.7 Acceleration curve
4 結論
伴隨著虛擬樣機技術的高速發展,基于ADAMS 強大的仿真分析功能,通過對多層組合式連續球磨機的粗磨系統進行運動仿真與運動學分析,所得位移曲線圖、速度曲線圖及加速度曲線圖均與多層組合式連續球磨機粗磨系統設計要求相吻合。結果表明了該多層組合式連續球磨機粗磨系統機構設計方案的可行性并能實現相應功能。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
電子制作(2018年18期)2018-11-14 01:48:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
山東工業技術(2016年15期)2016-12-01 05:31:22