面向果園多機器人通信的AODV路由協議改進設計與測試
2021-09-10 09:46:12毛文菊劉恒王東飛楊福增劉志杰
智慧農業(中英文)
2021年1期
關鍵詞:仿真
毛文菊 劉恒 王東飛 楊福增 劉志杰
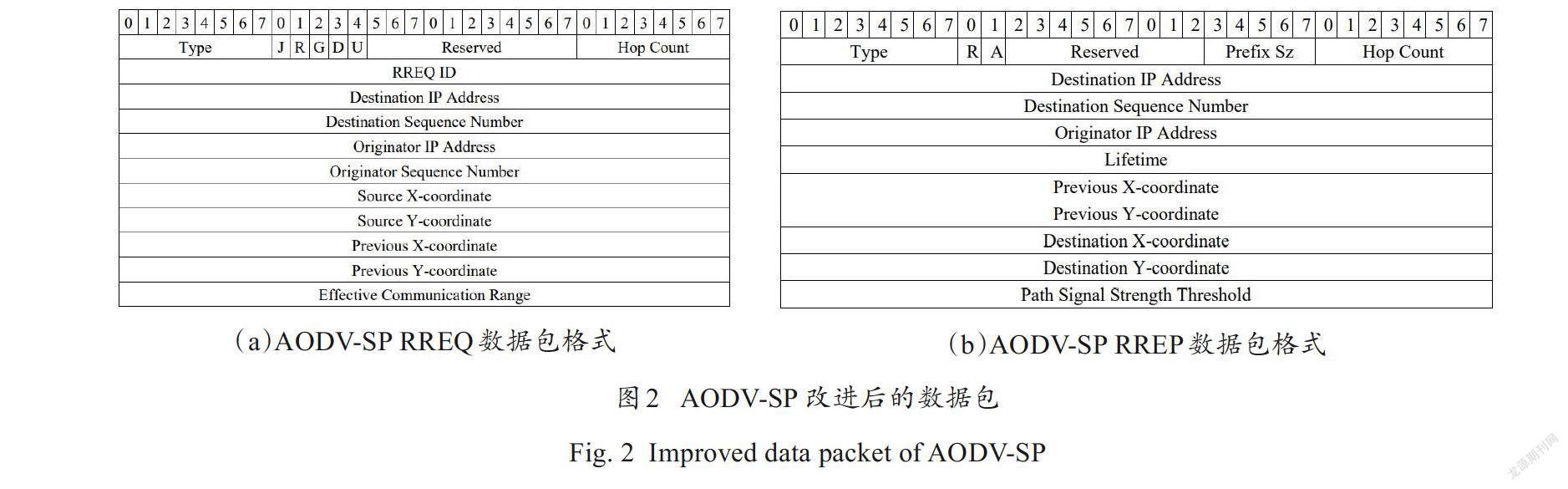
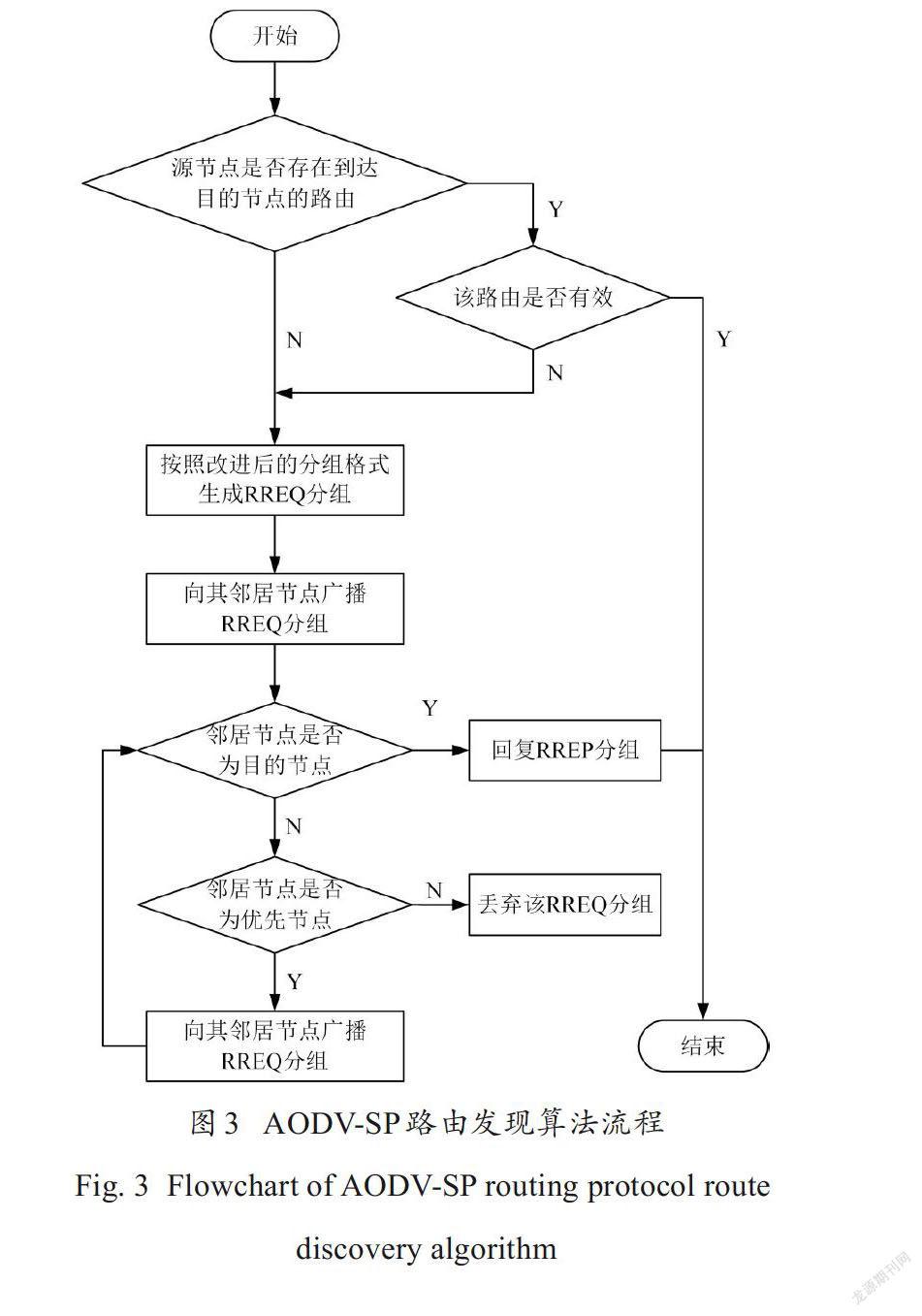
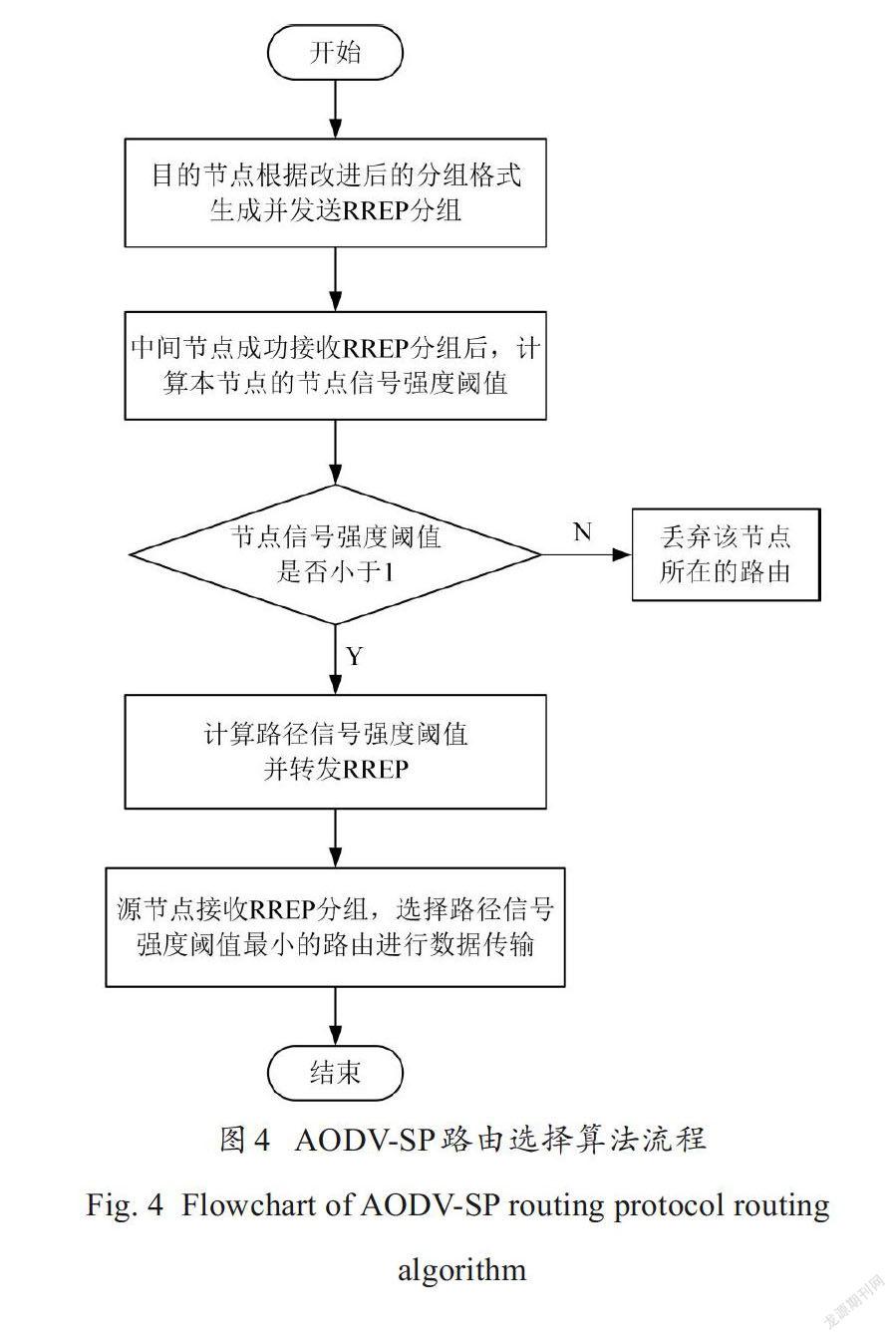
摘要: 針對多機器人在果園中作業時的通信需求,本研究基于Wi-Fi信號在桃園內接收強度預測模型,提出了一種引入優先節點和路徑信號強度閾值的改進無線自組網按需平面距離向量路由協議(AODV-SP)。對AODV-SP報文進行設計,并利用NS2仿真軟件對比了無線自組網按需平面距離向量路由協議(AODV)和AODV-SP在發起頻率、路由開銷、平均端到端時延及分組投遞率4個方面的性能。仿真試驗結果表明,本研究提出的AODV-SP路由協議在發起頻率、路由開銷、平均端到端時延及分組投遞率4個方面的性能均優于AODV協議,其中節點的移動速度為5 m/s時,AODV-SP的路由發起頻率和路由開銷較AODV分別降低了3.65%和7.09%,節點的移動速度為8 m/s時,AODV-SP的分組投遞率提高了0.59%,平均端到端時延降低了13.09%。為進一步驗證AODV-SP協議的性能,在實驗室環境中搭建了基于領航-跟隨法的小型多機器人無線通信物理平臺并將AODV-SP在此平臺應用,并進行了靜態丟包率和動態測試。測試結果表明,節點相距25 m時靜態丟包率為0,距離100 m時丟包率為21.01%;動態行駛時能使機器人維持鏈狀拓撲結構。本研究可為果園多機器人在實際環境中通信系統的搭建提供參考。
關鍵詞: 果園;AODV-SP路由協議;無線通信;多機器人;物理平臺;仿真
中圖分類號: S24??????????? 文獻標志碼: A??????????? 文章編號: 202101-SA001
引用格式:毛文菊, 劉恒, 王東飛, 楊福增, 劉志杰. 面向果園多機器人通信的AODV路由協議改進設計與測試[J]. 智慧農業(中英文), 2021, 3 (1): 96-108.
Citation:MAO Wenju, LIU Heng, WANG Dongfei, YANG Fuzeng, LIU Zhijie. Improved AODV routing protocol for multi-robot communication in orchard[J]. Smart Agriculture, 2021, 3 (1): 96-108. (
1? 引? 言
果園生產作業具有勞動強度大、勞動力密集、季節性強的特點。……
登錄APP查看全文
猜你喜歡
中國教育技術裝備(2016年20期)2016-12-12 10:09:15
中小企業管理與科技·下旬刊(2016年10期)2016-11-18 20:57:34
科技資訊(2016年18期)2016-11-15 20:09:22
科技資訊(2016年18期)2016-11-15 07:55:28
價值工程(2016年29期)2016-11-14 02:01:16
電子技術與軟件工程(2016年18期)2016-11-14 00:46:54
數字技術與應用(2016年9期)2016-11-09 23:25:33
數字技術與應用(2016年9期)2016-11-09 22:09:07
科技視界(2016年18期)2016-11-03 21:44:44
科技視界(2016年18期)2016-11-03 20:31:49
