某地鐵車輛制動狀態故障分析與改進措施
2021-09-10 06:43:43劉瑜何小軍劉堯喜亓保平
交通科技與管理 2021年6期
劉瑜 何小軍 劉堯喜 亓保平
摘 要:采用EP2002制動系統的某地鐵車輛在運行過程中,HMI多次報出制動狀態故障,提示某節車制動狀態不一致,經下載制動系統故障數據分析,制動系統并未報出故障。對TCMS系統數據分析后,發現該故障的根本原因在于制動狀態故障的判斷邏輯。本文通過對故障數據與制動狀態故障判斷邏輯進行深入分析,明確了制動狀態故障的問題原因,并制定了改進措施,經過改進后,列車運用良好,未再報出該故障。
關鍵詞:制動狀態故障;架控;制動系統;EP2002
0 引言
某地鐵項目車輛制動系統采用EP2002制動系統,該制動系統為架控式,即每個EP2002閥控制一個轉向架的空氣制動,由于其先進性與可靠性,目前在國內地鐵項目中得到了廣泛運用。本地鐵項目車輛上線以來,多次報出制動狀態故障,其中T555車報5車制動狀態故障,T252車報2、3、6車制動狀態故障。回段后,分析制動系統監控數據,制動系統制動狀態正常,未報故障。對下載的TCMS系統數據進行分析,發現該問題是由于制動狀態故障判斷的邏輯導致的。
本文通過對制動狀態故障判斷邏輯深入分析,結合TCMS系統故障數據,研究該故障的根本原因,并制定有效改進措施。
1 制動狀態故障判斷邏輯分析
制動狀態故障主要基于制動狀態一致性判斷,TCMS系統比較LCU從智能閥(網關閥)采集的硬線信號與BCU通過MVB網絡發出的制動狀態信號是否一致,當不一致時,報出制動狀態故障。
1.1 制動狀態信號來源
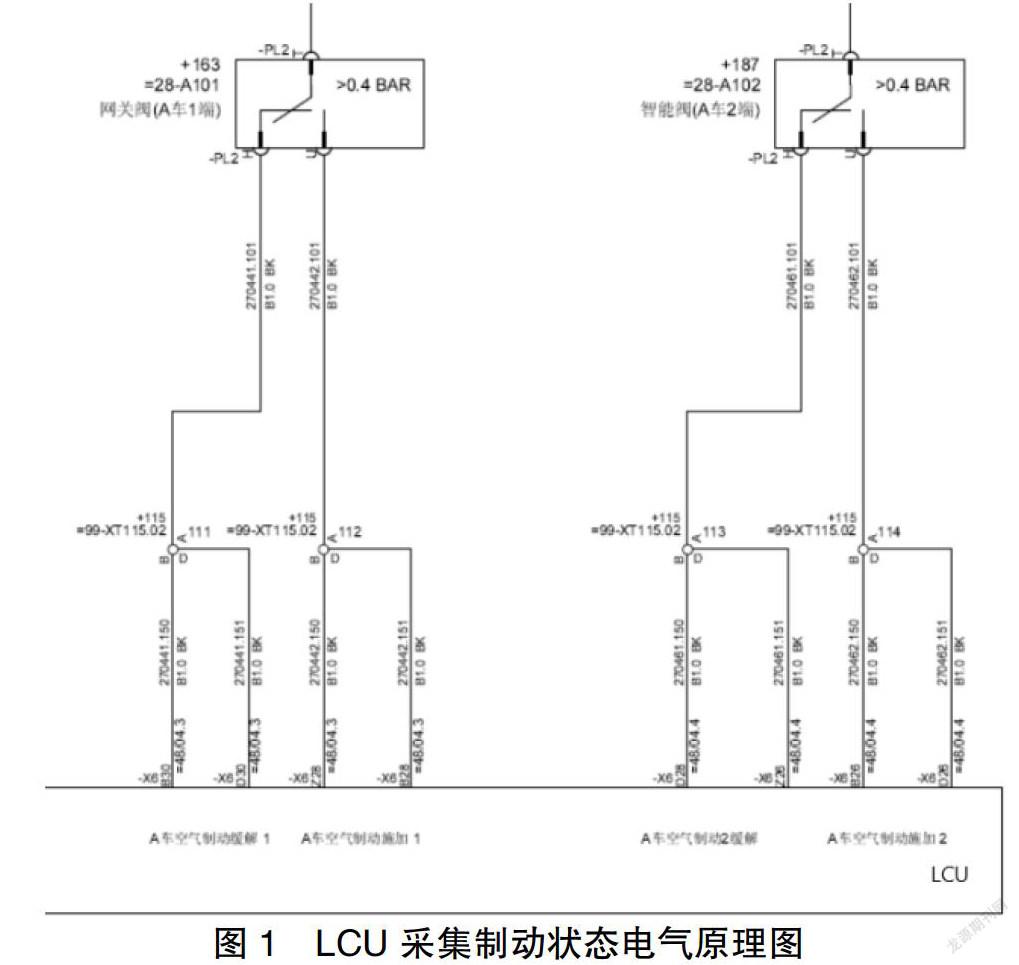
本地鐵項目車輛制動系統采用EP2002制動系統。如圖1原理圖所示,每節車輛上的智能閥(網關閥)上PL2插頭針腳的制動狀態信號均通過硬線給 LCU 進行采集,該處信號為一個0.4 bar壓力開關信號,每個智能閥(網關閥)制動狀態判斷邏輯是:制動缸壓力大于 0.4 bar 時,判定該閥為制動狀態;制動缸壓力不大于 0.4 bar 時,判定該閥為緩解狀態。LCU采集該信號后發送到TCMS系統。
另一方面,制動系統BCU對于制動狀態(施加或者緩解)通過 EP2002 閥內置控制軟件實時讀取制動缸壓力予以判斷,并向 TCMS系統實時反饋。
1.2 制動狀態故障判斷邏輯
本項目中,TCMS系統將每節車的BCU反饋網絡的制動狀態信號與LCU采集的制動狀態硬線信號作一致性判斷,其判斷邏輯如下:
①BCU 反饋轉向架 1 或轉向架 2 制動未施加,同時 LCU 反饋轉向架 1空氣制動或轉向架 2空氣制動未緩解;
②BCU 反饋轉向架 1 且轉向架 2 制動已施加,同時 LCU 反饋轉向架 1空氣制動且轉向架 2空氣制動已緩解。
上述情況下,持續時間超過 8 s報出制動狀態故障。
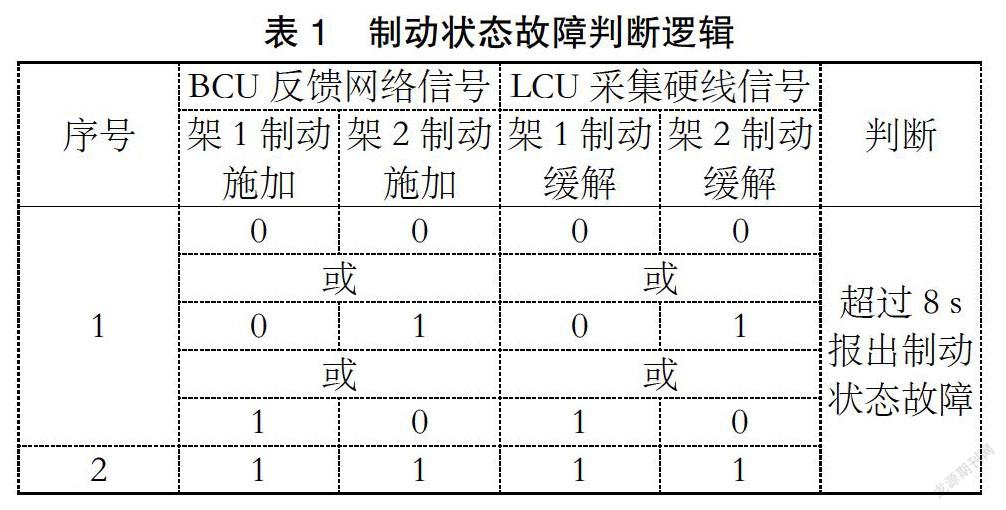
即對BCU 反饋轉向架 1 和轉向架 2的制動施加信號取“與”運算,對LCU 反饋轉向架 1和轉向架 2制動緩解信號取“與”運算,二者結果相等時,持續時間超過 8 s報出制動狀態故障。其具體判斷邏輯如表1所示,當每節車的BCU反饋網絡信號與LCU采集硬線信號符合下述條件時,則判斷制動狀態故障。
該邏輯本意是比較LCU從智能閥(網關閥)采集的硬線信號與BCU通過MVB網絡發出的制動狀態信號是否一致,當不一致時,報出制動狀態故障。但實際上從表1來看,當單節車架1與架2的制動信號不一致時,盡管此時BCU反饋網絡的制動狀態信號與LCU采集的制動狀態硬線信號一致,超過 8 s也會報出制動狀態故障。
例如,當單節車架1與架2制動狀態不一致時,表中信號(BCU架1制動施加,BCU架2制動施加,LCU架1制動緩解,LCU架2制動緩解)為0 1 1 0 或者1 0 0 1,超過8 s也會報出制動狀態故障。此時,BCU反饋網絡的制動狀態信號與LCU采集的制動狀態硬線信號實際上是一致的。
2 故障數據分析
T555車與T252車的制動系統數據無異常,因此,對T555車與T252車的TCMS故障數據進行分析。
2.1 T555車故障數據分析
查詢TCMS系統數據,在10:57:54時,架1制動缸壓力34 kPa,架2制動缸壓力36 kPa,BCU判斷架1制動未施加,架2制動已施加,LCU采集信號架1制動緩解,架2制動未緩解,反饋給TCMS系統信號(BCU架1制動施加,BCU架2制動施加,LCU架1制動緩解,LCU架2制動緩解)為(0 1 1 0),此時,BCU與LCU反饋信號一致,架1緩解,架2制動,此狀態延續10 s至10:58:04。制動狀態故障判斷邏輯成立,因此報出制動狀態故障。
2.2 T252車故障數據分析
查詢TCMS系統數據,在05:45:31時,B1車架1制動缸壓力37 kPa,B1車架2制動缸壓力37 kPa,BCU判斷B1車架1制動已施加,B1車架2制動未施加,LCU采集信號架1制動未緩解,架2制動緩解,反饋給網絡系統信號(BCU架1制動施加,BCU架2制動施加,LCU架1制動緩解,LCU架2制動緩解)為(1 0 0 1),此時,BCU與LCU反饋信號一致,架1制動,架2緩解,此狀態延續8 s至05:45:38。制動狀態故障判斷邏輯成立,因此報出2車制動狀態故障。
在05:45:31時,C1車架1制動缸壓力37 kPa,C1車架2制動缸壓力35 kPa,反饋給網絡系統信號為(0 1 1 0),此狀態延續8 s至05:45:38。制動狀態故障判斷邏輯成立,因此報出3車制動狀態故障。同理,C2車架1制動缸壓力38 kPa,C2車架2制動缸壓力34 kPa,反饋給網絡系統信號為(1 0 0 1),報出6車制動狀態故障。
3 原因分析與改進措施
3.1 原因分析
原因主要有以下2點:
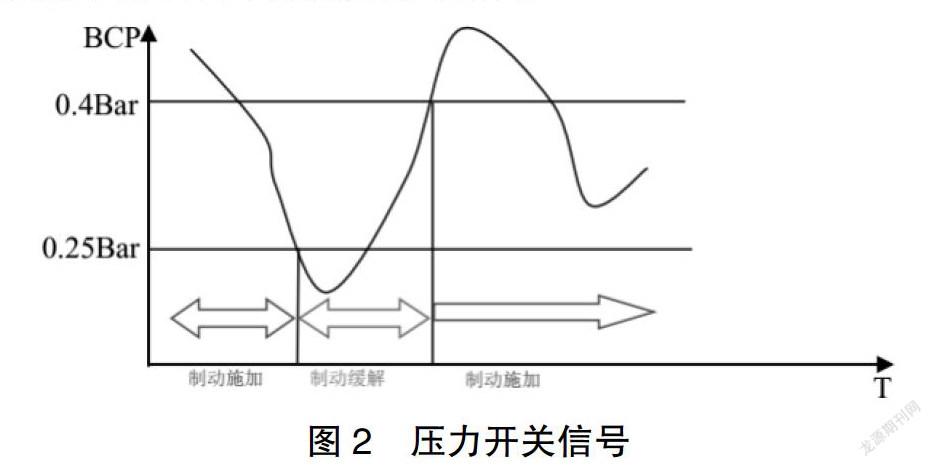
①BCU 對于制動狀態(施加或者緩解)通過 EP2002 閥內置控制軟件實時讀取制動缸壓力予以判斷,并向 TCMS 實時反饋。LCU 讀取信號源為 EP2002 閥 PL2 插頭針腳 壓力開關信號。LCU所使用開關信號觸發值均參考如下名義值:
- 制動壓力下降沿(緩解方向) 動作值: 0.25 bar;
- 制動壓力上升沿(施加方向) 動作值: 0.4 bar;
在不同的制動進程里,同樣的BCP壓力在臨界區間,可能會對應著不同的制動狀態信號。
上述報出故障的車輛BCP壓力記錄值在0.34 bar~0.38 bar上下,該壓力處于制動施加/緩解狀態判斷臨界點附近,EP2002閥隨機報告制動緩解或者制動施加屬正常現象。
②對于制動狀態一致性的判斷,在以往的車控式制動系統中,是從每節車的信號一致性進行判斷,因為車控式制動系統的特點,整車制動狀態是一致的,所以該控制邏輯在運用過程中未出現過問題。而在本項目中,由于使用了架控式的EP2002制動系統,再沿用以前的控制邏輯,從每節車的信號一致性進行比較,就會導致在架1與架2制動狀態不一致時,會報出制動狀態故障。而在架控式制動系統中,各轉向架制動狀態都是獨立控制的,不同轉向架的制動狀態存在短暫的不一致是正常現象。
3.2 改進措施
對每節車的信號一致性進行判斷,會導致在架1與架2制動狀態不一致時,也會報制動狀態故障。因此將每節車的信號一致性判斷改成每一轉向架的信號一致性判斷。
另外,制動工況時沒有判斷制動狀態的需求,信號一致性主要用于制動未緩解的識別,避免發生制動未緩解,帶閘行駛影響行車安全。因此在制動工況不需要進行信號一致性判斷,可以改為在非制動工況下進行信號一致性判斷。
綜上,針對制動狀態的一致性判斷邏輯改成如下:當列車在非制動的工況下,如果檢測到該架的硬線制動狀態輸出信號和BCU軟件制動狀態輸出不一致超過8 s則判斷制動狀態故障。本項目在制動狀態故障判斷邏輯更改后,安全運行至今未發生一起制動狀態故障。
4 結論
本文對本項目制動狀態故障的判斷邏輯進行了深入分析,找出了該項目頻繁報出制動狀態故障現象的根本原因,并作出了相應的改進措施,經改進后,運用良好,未再出現該故障現象。
參考文獻:
[1]何曄,羅慶.廣州地鐵5號線車輛EP2002制動系統故障分析及改進[J].機車電傳動,2011(4):50-51.
[2]馬喜成,龍倩倩.地鐵車輛用EP2002制動控制系統[J].機車電傳動,2007(4):38-42+61.