基于PLC的交通燈的控制系統設計
2021-09-10 07:22:44張鑫昌李樺芃
科學與生活 2021年13期
張鑫昌 李樺芃




摘要:本論文介紹了運用小型可編程控制器(S7-200PLC)控制的十字路口智能延時控制系統。此智能交通信號系統利用環形線圈檢測器來探測車道內車輛的通過,然后利用PLC內置的計數器在一定時間內對東西和南北方向的車量滯留數進行計數。利用相應的智能控制原則,達到對東西和南北方向的綠燈通行時間的延時,從而提高十字路口的交通效率、緩解交通擁擠狀況。
關鍵詞:可編程控制器智能控制;智能延時;車流量
1.引言
城市人口快速增長、經濟迅速發展,城市已有的基礎設施已經不能適應這樣的變化,所以,國家現在必須著重找到道路交通問題的改進方案。在我國,智能交通控制系統研究熱點主要有在普通單片機或PLC的控制方法上進行進一步改進和在人工智能計數的基礎上制定實時的控制方案。本論文采用基于人工智能計數的交通控制策略的方法,研究智能控制,從而解決城市道路擁擠問題,提高通行效率。
2.硬件設計
(1)傳感器
傳感器主要是在一定在精確度范圍內把采集的數據量轉換為系統所需要的量。本研究中,我們分別在南北和東西道路上各布置一組傳感器,其輸出信號可以直接輸入到PLC控制器中,這種傳感器的變化率在0.4%以上。
(2)環形線圈檢測器
本研究采用的環形線圈檢測器包含三部分:檢測元件、轉換元件、相關轉換電路。組成部分如圖一所示。
本研究是將采集數據的元件與被測量數據的元件直接連接,本研究中是測量車輛滯留量,用于交通控制系統規定時間計算。檢測器檢測到信息后,先對采集的信息處理再傳輸到主控制器上,最后成為優化控制的輸入信息。所以,檢測器與人的眼睛類似,是交通燈控制系統的眼睛,決定著交通燈控制系統的實時控制。
(3)車輛檢測電路原理圖
依據上述原理,我們設計出了本研究所用的車輛檢測電路原理圖。主要包含四部分:感應線圈、信號源、對比較鑒別電路、感應線圈檢測電路。原理圖如圖二所示。
3. 基本控制邏輯
交通燈的智能控制過程其流程圖如圖三所示:當打開電源時,首先,東西方向的紅綠燈閃亮紅燈,南北方向的紅綠燈閃亮綠燈,在各個道路的紅綠燈亮起時,東西南北各個方向的控制器中的計時器開始計工作。30S后,把南北方向統計的車輛滯留數相加得到南北方向車輛滯留數S1,東西方向的計數器相加得到東西方向的車輛滯留數N1,然后比較南北方向的車輛數S1和東西方向的車輛數N1,若S1>=N1+20,則南北方向的綠燈時間在原來基礎上在延長30S,東西方向的紅燈時間在原來基礎上延長30S。30S后,南北方向控制器中的計數器相加得到的南北車輛滯留數為S2,東西方向的控制器中的計數器相加得到的東西方向道路車輛數為N2,將南北方向統計的車輛數S2與東西方向的車輛數N2進行比較,若N2≥S2+20,則東西方向信號燈綠燈的閃亮時間增加30S,同時南北方向紅綠燈的紅燈時間持續閃亮30S,30S后,南北方向紅綠燈的綠燈在閃爍3,之后在閃爍2S黃燈,在整個控制過程中,東西方向紅綠燈的顏色依然保持為紅燈,閃爍5S。如此循環往復。
4. 交通信號燈的系統設計
根據上述介紹的PLC優點,本設計采用的控制裝置是西門子S7-200系列的PLC,CPU型號為224。S7-200系列的優點主要表現在以下幾個方面:可靠性較高、指令較為豐富、上手較為簡單易,編程簡單、便捷的操作、功能較多、實時性強、通信能力強。
本研究采用西門子S7-200CPU型號224的PLC,CPU224型號的PLC組成部分如下:
一、核心處理器CPU:西門子S7-200CPU224型號的PLC含有獨立的中央處理單元、電源和特有的輸入輸出點]。
二、擴展模塊:控制器具有本設計所需的特定輸入和輸出口,當所需要的I\O口較多時,可采用擴展單元的I/O口。
三、最大I/O配置:CPU224型號的PLC,其擴展模塊最大為7個,14個輸入點和10個輸出點。
四、電源模塊:PLC由220V交流電源供電,且有電源保護模塊,保證了工作的安全,提高了效率。
5.軟件設計
(1)數字量輸出
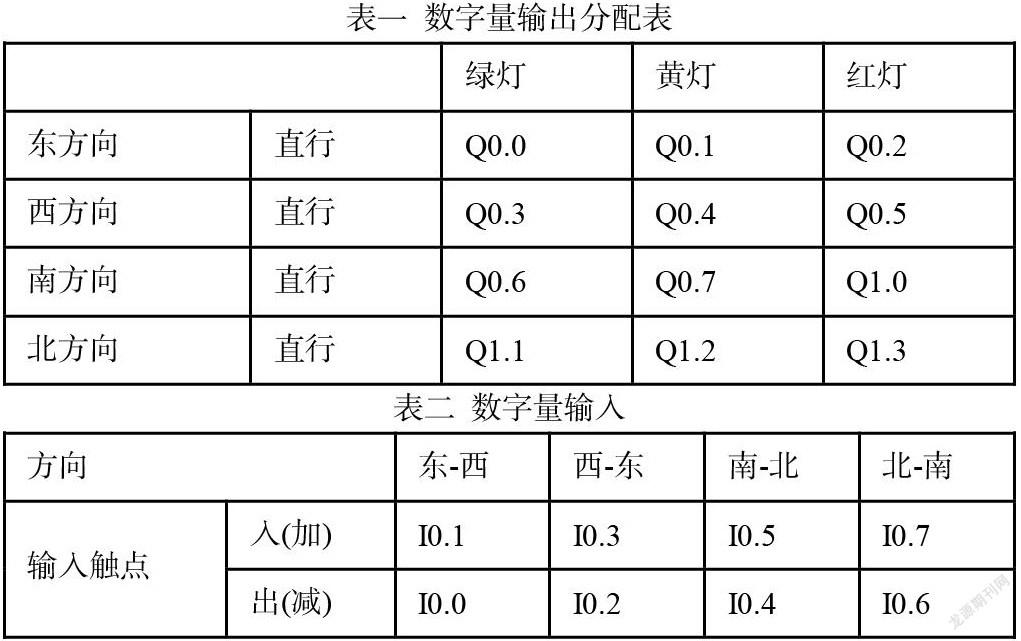
本設計的交通燈控制系統設計總共采用了12個數字量輸出觸點。其中Q0.0~Q1.1是用來控制驅動交通信號燈。如表一所示。
(2)數字量輸入
交通燈智能控制系統總共用了到9個輸入出點,符合本設計采用的CPU型號,其中I0.1與I0.0為東西方向的車輛檢測信號的減數信號輸入端和加數信號輸入端。控制系統需要8個,224CPU具有14個輸入觸點。具體輸入觸點的作用如表二所示。10.0和10.1、10.2和10.3、10.4和10.5、10.6和10.7分別為由東至西、由西至東、由南至北、由北至南四個方向車輛檢測信號的減計數和加計數信號。
由上文可知,控制系統需要8個數字量輸入。而東西南北方向各需要一個一個單路地感器,加上開關鍵,也就是輸入端口必須有9個。
(3)計時器的分配
交通燈的智能控制系統采用了四個計數器,D0、D1、D2、D3,其所統計道路情況如表三所示。
(4)交通燈控制系統的控制模式的選擇
由第四章的交通燈智能控制過程與正常控制過程可知,交通信號燈的正常控制過從都是根據提前設置好的時間,寫好相關循環程序,不斷循環執行來控制交通燈。而交通燈的智能控制過程是根據南北方向與東西方向的車流量來自動調整時間,這兩種模式的執行流程圖在上文已經介紹,這里不再詳細介紹。
(5)智能延時的實現
直行綠燈延時的條件:當前通行的某方向的車量相加的滯流數大于另一方向車量相加滯留數加上相關參數時,程序會自動選擇相關延時方案,使相關方向綠燈時間延長。
(6)車輛計數的實現
本研究利用埋設在底下的環形線圈檢測器來檢測車流里量,當有車輛通過道路時,根據電磁感應定律,會輸出一個繼電器信號,此時PLC內部的計數器計數。當車輛行駛進入車道時,控制器內部的計數器加1,駛出道路時,內部計數器減1,通過兩者計數器相減計算出車輛滯留量。
6.總結
本論文控制系統采用S7-200PLC設計的智能交通信號控制系統運用實時檢測、判斷延時,避免了一個方向交通繁忙時某一方向的車輛較多卻是紅燈,然而其他方向卻是無車或通過的車輛較少依然亮著綠燈,減輕了交通高峰期的壓力和主要干道路口的擁堵,將交通智能系統的有效利用率達到最高。
參考文獻
[1]趙輝.《設計交通燈控制系統的PLC程序》教學設計[J].內江科技,2020, 41(12):61+5.
[2]王浩然.基于西門子S7-200PLC的智能交通燈系統設計[J].農家參謀,2020(24):255.
[3]劉浩宇,李柯星,陳金雪,王穎.基于FPGA的交通控制燈邏輯電路的設計[J].電腦知識與技術,2020,16(21):224-225.