基于目標檢測技術在智能垃圾分類上的創新應用
2021-09-10 00:46:37吳林鋒廖文溯陳強陳泳祺陳瑩玲何志敏
科教創新與實踐 2021年1期
吳林鋒 廖文溯 陳強 陳泳祺 陳瑩玲 何志敏


摘要:創新應用了目標檢測與垃圾分類結合處理垃圾分類問題,將垃圾種類進行類別劃分后保存為數據集,使用目標檢測技術對物體進行識別并與數據集內的垃圾物品進行細節比對,并得出被檢測物品的垃圾種類,通過機器學習方式大幅降低人民對垃圾分類的門檻,有助于加強城市環境的保護以及資源的有效回收利用。
關鍵詞:垃圾分類;目標檢測
1 項目背景
1.1我國垃圾分類方式的現狀
隨著經濟社會的快速發展以及人民生活水平的不斷提高,城市產生的垃圾日漸劇增,并逐漸上升成為一個城市發展必須面臨的重大難題。我國早在多年前開始倡導垃圾的分類處理,但多年來仍有大部分城市依舊在施行垃圾混合收集及處理。2000年4月,國家建設部首先在北京、上海等8個城市實行垃圾分類收集試點,實踐了幾年時間,雖有所收獲,但效果并不理想。截止2019年,我國仍然沒有全面開展垃圾分類。但在2019年7月1日起,上海開始正式實施垃圾分類,而且,到2020年底,先行先試的46個重點城市,要基本建成垃圾分類處理系統。
1.2 國際上先進的垃圾分類方式的現狀
在德國80%的居民參與生活垃圾源頭分類,德國的生活垃圾分類起步于20世紀70年代,到90年代玻璃的同收量己達到其產生量的50%,紙張的同收量己達到其產生量的41%,塑料的同收量己達到其產生量的5%,紙板的同收量己達到其產生量的三分之一;85%的美國人參與街道資源化利用的廢物收集工作;加拿大也是在20世紀70年代就己經開始進行城市生活垃圾的分類同收,并形成了一套完整有效的垃圾分類同收系統;瑞士、奧地利人保護環境是非常自覺的,他們不需要任何“環境衛生條例”來約束,其生活垃圾分類自覺執行;我國的近鄰日本是生活垃圾分類做得最好的國家之一,其國民是生活垃圾分類的主體,其生活垃圾分類教育是“從娃娃抓起”的,目前己經形成一套完整的生活垃圾分類法律體系和分類后的垃圾分類處理處置體系。
2 技術設計
2.1 介紹
在深度學習領域也衍生出許多分支,如NLP(自然語言處理)和圖像識別等。在NLP領域,詞向量是將深度學習引入到NLP領域的一個核心技術。在機器視覺領域,CNN、RCNN、Faster RCNN等網絡已經在當下變得非常流行,成為眾多企業或開發者所選擇的圖像處理基礎網絡結構。
自Attention機制提出后,加入attention的Seq2seq模型在各個任務上都有了提升,之后google又提出了解決Seq2Seq問題的Transformer模型,用全attention的結構代替了lstm,在翻譯任務上取得了更好的成績。現階段研究者已嘗試將 Transformer 用于目標檢測任務,填補了 Transformer 用于目標檢測的空白。
Transformer模型是由文章《Attention is All You Need》提出,該模型有一個完整的Encoder-Decoder框架。該模型被用于機器翻譯任務,和以往網絡架構有所區別的是,在該網絡架構中,編碼器和解碼器沒有采用 RNN 或 CNN 等網絡架構,而是采用完全依賴于注意力機制的架構。
Facebook AI的研究者把 Transformer 用到了目標檢測任務中,還取得了媲美 Faster R-CNN的效果。該研究推出的 Transformer視覺版本——Detection Transformer(DETR),可用于目標檢測和全景分割。DETR 利用標準 Transformer 架構來執行傳統上特定于目標檢測的操作,簡化了檢測 pipeline。
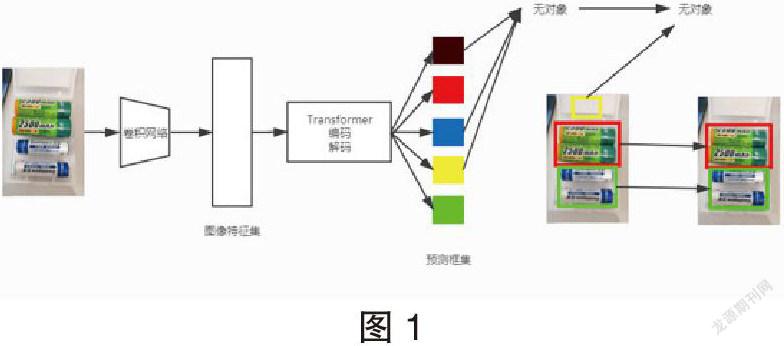
原理圖:
DETR 通過將常見的 CNN 與 Transformer 架構相結合,將CNN提取的特征集傳遞給transformer,經過編碼encoder和解碼decoder操作后送到預測框集,通過FFN直接(并行)預測最終的檢測結果。在訓練階段,二分匹配將唯一的預測分配給 GT 框,不匹配的預測產生無對象(?)類預測。
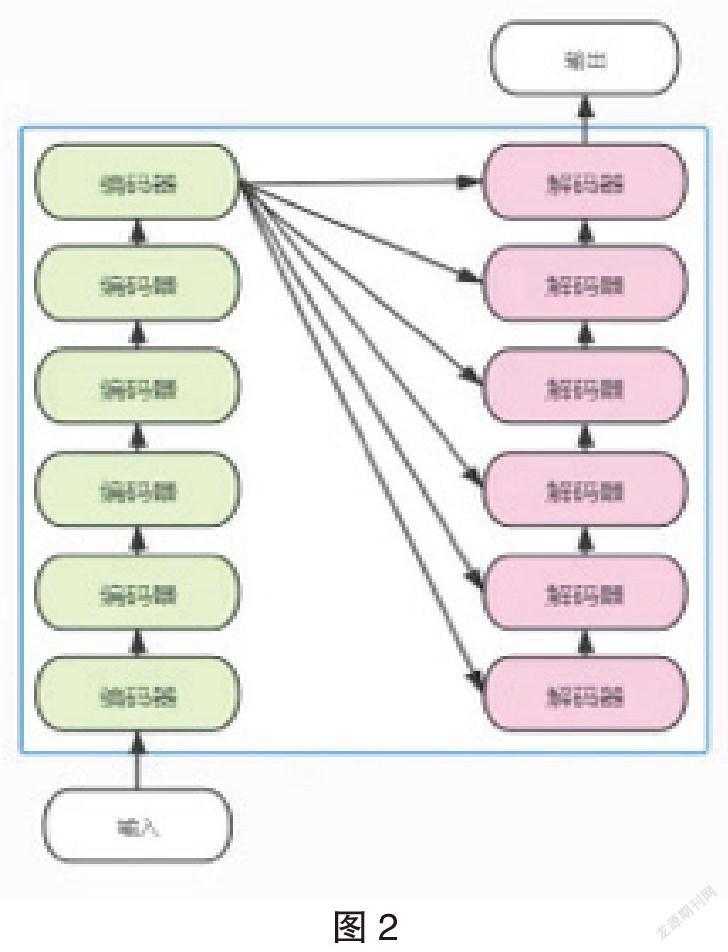
Transformer結構簡圖,編碼組件由多個編碼器encoder組成,解碼組件也是對應的相同數量。對應的輸入經過一系列編碼,將最終的編碼結果分別傳輸給解碼組件各個解碼器進行解碼并傳送給下一個,最終得到輸出。
2.2 transformer網絡應用
2.2.1 項目目的
1. 嘗試將最新的transformer目標檢測技術應用到解決實際生活問題中,如對垃圾類別的檢測。
在實驗中,我們只需對物體進行正常的信息標注,分類上只需在前端app添加結果的映射,即可獲取對應的垃圾類別。例如,在檢測出目標物體為 “餅干”后,將該結果傳到前端,顯示時通過映射可顯示為“廚余垃圾-餅干”,諸如此類。
2. 從現實生活入手,制作貼合生活的數據集,適當引入噪聲,提高檢測模型的適用性與魯棒性。
3. 對實驗進行記錄,查看性能及資源的使用情況,統計實驗結果的指標值。
2.2.2 實驗環境
實驗的硬件環境為:CPU:Intel Core i7-8700 @ 3.20GHz,由于實驗需要使用顯卡進行,使用的顯卡為:Nvidia GeForce RTX 2060 SUPER,顯存為8GB。采用的系統環境為:Windows10操作系統,使用pytorch框架,版本為1.5.1。實驗環境使用Python語言實現,Python版本為3.7,實驗使用cuda進行訓練加速。
實驗的數據集源于生活實際的拍攝,示例圖如圖3所示。用labelme對數據及進行標注。
2.2.3 實驗結果及分析
實驗使用1445張圖片,共包含4個類別的物體,其中一樣物品大概包含360張圖片,訓練集和測試集約按8:2的比例進行數據分配,由于硬件性能受限,進行300epoch的實驗。
最終獲取的算法性能評估如圖4、圖5、圖6所示。(基于detr backbone r50實驗)
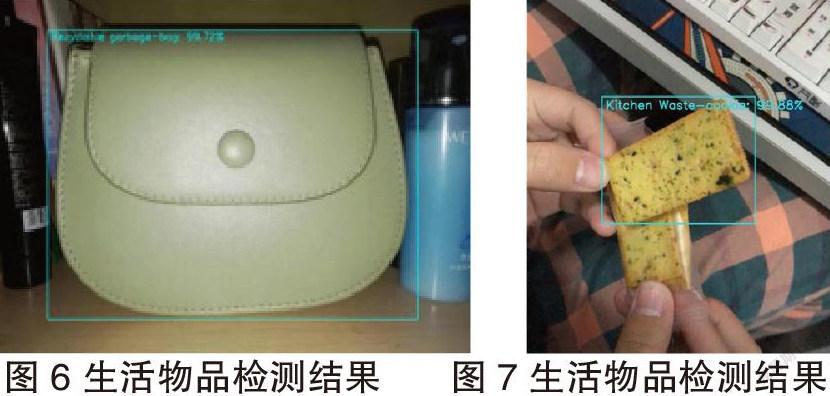
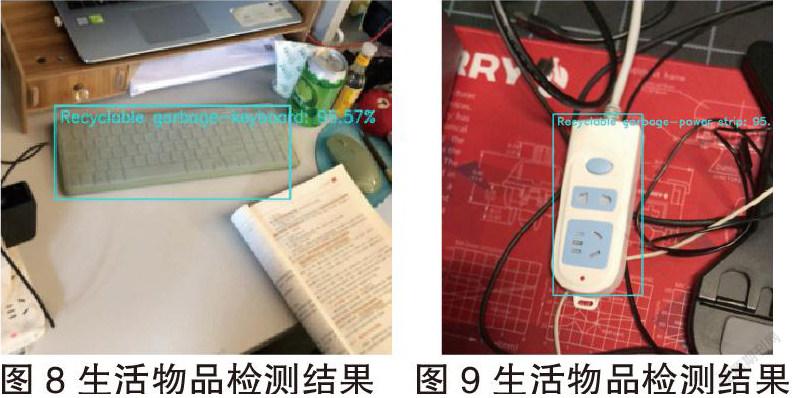
2.2.4 實際應用檢測結果:
由實驗結果分析可知,實驗結果符合實際分類規定。在數據集足夠充分且訓練的epoch等參數設置適當的話,detr網絡能對目標對象進行準確度較高的判別,這得益于attention網絡機制,可以在較為少數的樣本上取得較為不錯的檢測結果。
3 可推廣性分析
3.1應用場景
于企業內部,可規范企業員工對于辦公過程產生的垃圾如打印紙、打印機墨盒、回形針、文件夾,企業內部休息區產生的垃圾如飲料瓶、便當盒、便當盒內的餐余垃圾等的有效分類;在居民家中日常生活產生的垃圾種類是類型最為復雜的,運用目標檢測技術對復雜的垃圾進行識別分類對機器來說是一件非常輕松的事,大大減輕居民的學習成本和負擔,同時也能提高垃圾分類的效率和準確性。于垃圾回收處理廠而言,這是一項減輕工作負擔、具有極高實用性的應用,應用目標檢測技術于垃圾分類中可提高垃圾回收處理流水線的工作效率,增強流水線的處理準確度。
3.2推廣意義
1) 降低分類回收門檻,推進垃圾分類政策落實到位
基于目標檢測技術的智能垃圾分類可通過手機軟件形式實現垃圾識別分類效果,極大地降低了垃圾分類回收的門檻和難度,普通老百姓都可通過手機對身邊的垃圾進行分類,有助于居民對垃圾分類的認識,加深居民對不同類別垃圾之間區別的理解,增強居民對垃圾分類的主動意識,有效幫助居民區別日常生活中產生的各色各樣的復雜的垃圾。同時,廢舊物垃圾得到了合理正規的分類,提高了回收的規范性和準確性。
2) 為政府進行城市管理提供了可靠的信息數據
基于目標檢測技術的智能垃圾分類應用通過記錄每次識別后產生的垃圾種類、數量、產生的地點等信息并積累信息,有助于政府對有關方面的統計,為政府針對性的實施垃圾回收政策提供可靠的科學的信息資料。
4 項目總結
在目標檢測技術發展迅速的今天,transformer目標檢測以異于往常目標檢測網絡的結構,能在目標檢測結果上取得不錯的成績。當前transformer檢測技術剛起步,或許隨著transformer網絡的改進,網絡結構改進以進一步減少參數量,或許能更好地應用于各個領域。
參考文獻:
[1]《End-to-End Object Detection with Transformers》 ——Nicolas Carion* , Francisco Massa* , Gabriel Synnaeve, Nicolas Usunier, Alexander Kirillov, and Sergey Zagoruyko.
[2]《Attention is All you Need》 ——Ashish Vaswani, Noam Shazeer, Niki Parmar, Jakob Uszkoreit, Llion Jones, Aidan N. Gomez, ?ukasz Kaiser, Illia Polosukhin.
[3]《含液體垃圾的智能分類回收垃圾桶設計》——吳逸超,鄭天華,魏玉蘭.
佛山科學技術學院 528011
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
數學小靈通(1-2年級)(2021年4期)2021-06-09 06:25:56
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
中學生數理化·七年級數學人教版(2019年4期)2019-05-20 10:06:32
中學生數理化·七年級數學人教版(2018年6期)2018-06-26 08:36:06
初中生世界·七年級(2017年9期)2017-10-13 22:27:46
發明與創新(2016年38期)2016-08-22 03:02:52
