碟式斯特林太陽能發電系統研究
2021-09-11 09:29:40韓晨霞
工業加熱 2021年8期
韓晨霞
(神木職業技術學院, 陜西 神木 719300)
作為太陽能熱利用研究范圍的前沿性課題,太陽能發電技術一直備受各界關注,其通過高精確度聚光器匯集低密度太陽能,以轉變為高密度熱能,基于加熱工質驅動發電機,以實現光電轉換[1]。而作為發展潛質最佳的碟式太陽能發電技術,以其設計的斯特林太陽能發電系統,通過旋轉拋物面反射鏡匯聚太陽光于接收器,接收器內部工質持續加熱到750 ℃,以驅動發電機進行發電。
1 斯特林太陽能發電系統設計
1.1 系統原理
斯特林太陽能發電系統原理[2]具體如圖1所示。

圖1 系統原理
斯特林發動機與雙軸跟蹤聚光器是太陽能發電系統的重要構成部分,其中,雙軸跟蹤聚光器為旋轉拋物面形狀,以太陽跟蹤系統驅動聚光器,促使其與太陽相對,以吸收太陽能。而太陽能進入斯特林發動機的集熱器中,轉換成發動機工質吸收的熱能,以此為發動機提供熱能源。斯特林發動機是整個系統的關鍵部件,主要作用是吸收熱能轉換成動能,將發動機輸出軸功轉換為發電機電能,如此太陽能便實現了向電能的整個轉變。斯特林太陽能發電是基于發動機轉換熱能為機械能,通過反射鏡聚焦入射太陽光于焦點,以發動機進行熱能收集,并加熱工質,驅動發電機完成發電工作。
1.2 聚光器
斯特林太陽能發電系統以聚光器聚焦太陽光于接收器中,以此為發動機提供熱源。聚光器則基于太陽跟蹤系統加以驅動,實時保持與太陽正相對。
聚光器在聚光時經常會出現誤差,即傾斜誤差、跟蹤誤差、接收器定位誤差、太陽光線誤差等等[3]。誤差計算的經驗公式具體為
截斷效率公式即

(1)
式中:D為聚光比;Fcoll為開口面積,m2;Frec為腔體開口面積,m2;κ為誤差。
總光學誤差分布標準誤差即:
(2)
式中:κslp為傾斜誤差;κspec為接收器定位誤差;κw為跟蹤誤差;κrec為太陽光線誤差。
1.3 跟蹤控制系統
以光電檢測追蹤方式與視日運動軌跡追蹤方式有機結合,整合應用依賴于絕對始終開展的視日運動軌跡追蹤方式與依賴于傳感器開展的光電檢測方式追蹤太陽,充分發揮二者優勢特性,以期獲取理想效果。雙軸跟蹤控制系統框架[4]具體如圖2所示。

圖2 雙軸跟蹤控制系統框架
所謂雙軸跟蹤主要是為了促使聚光器軸線與太陽正相對,其具體劃分為太陽方位角跟蹤與高度角跟蹤。基于絕對時間定位太陽方向,并檢測太陽與聚光系統的相對位置以進行PID調節,確保系統更為精確化。
太陽高度角與方位角的調節流程具體為:首先粗調,即傳輸絕對時鐘太陽高度角或者方位角給定值信號于電動執行結構,機構則就信號進行聚光器角度調整,使得轉換于大概與太陽相對應的位置;其次細調,即基于聚光器上二維相對位置角傳感器檢測太陽相對于聚光器的位置,把聚光器位置角度與0°基準值對比分析,以獲取信號,并傳輸于PID控制器加以調節,與絕對時鐘太陽高度角或者方位角給定值信號疊加處理,然后傳輸所得信號于電動執行機構,機構就信號為依據調整聚光器角度,從而轉動到與太陽相對應的位置,接受照射。
1.4 熱電轉換裝置
1.4.1 集熱器
作為斯特林發動機能量重要載體,集熱器負責將太陽能聚光器所采集能量快速準確傳輸于斯特林發動機熱腔內,以此為其提供能量。因此就集熱器而言,導熱性應保持最佳狀態,對此選擇紫銅與太陽能電加熱模擬器相互銜接,從而吸收熱量。
集熱器背面具體如圖3所示。

圖3 集熱器背面示意圖
集熱器是基于銅塊與鋼板共同組成的,二者之間以螺絲、螺母相連接,以硅酸鋁絕緣材料進行填充,而背面的螺絲、螺母負責連接集熱器與太陽能電加熱模擬器,以模擬器為集熱器傳輸熱量,而法蘭則與回熱器法蘭對接,負責走氣。
斯特林發動機集熱器正面具體如圖4所示。

圖4 集熱器正面示意圖
集熱器方板負責掩蓋空氣壓縮機機頭的氣缸,即所謂的發動機熱腔。小孔的作用是基于螺絲螺母連接集熱器與空氣壓縮機機頭的氣缸,另一個孔負責走氣,是氣缸活塞運動所需氣體運動通道。氣體經過氣口進出空氣,反復循環,在流動時,集熱器將熱量傳輸到空氣中[5]。
1.4.2 回熱器
斯特林發動機回熱器具體如圖5所示。
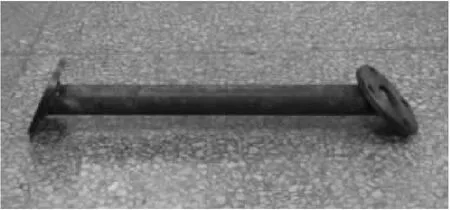
圖5 回熱器示意圖
回熱器設計需就發電系統集熱器與冷卻器位置獲取具體尺寸,根據二者間距與角度關系獲取具體長度。管壁內部以絲網進行填充,可縮減發電系統內部空間,提升其工作效率。絲網還可儲存熱量,進行回熱,從而提升熱利用率。
1.4.3 冷卻器
冷卻器具體如圖6所示。

圖6 冷卻器示意圖
作為斯特林發動機復雜零部件,冷卻器的關鍵作用是通氣、通水,且水氣分離。圖中右側法蘭負責銜接回熱器,鋼管左側附帶白色紙張的是逆制閥,負責為發電系統內部充氣,氣壓越大,則發動機效率越高[6]。
1.4.4 氣 缸
系統即空壓機機頭,選用兩大一小三個氣缸,一大一小角度相差120°,大氣缸作為熱氣缸;小氣缸作為冷氣缸,具體如圖7所示。
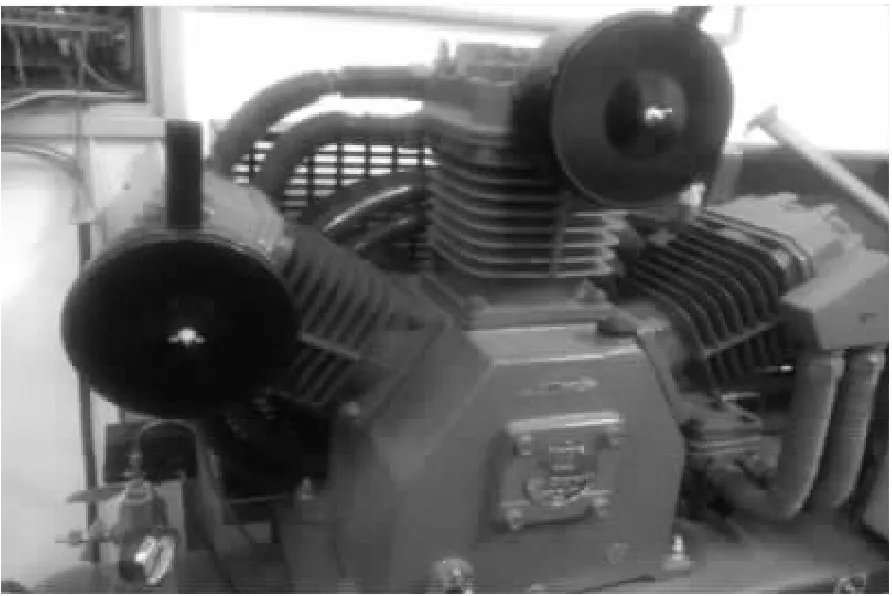
圖7 氣缸示意圖
1.4.5 電 機
斯特林太陽能發電系統選用了鼠籠型異步電機,具體如圖8所示。

圖8 電機
2 斯特林系統模型構建
斯特林系統模型結構[7]具體如圖9所示。
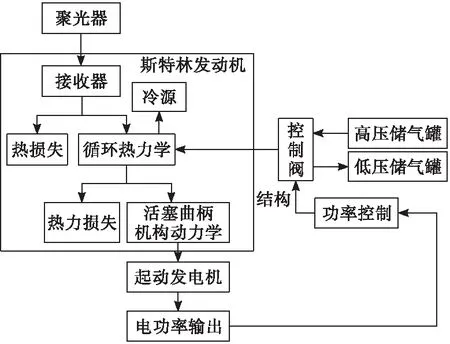
圖9 斯特林系統模型結構
模型包含太陽能-熱能-機械能-電能能量轉換整個過程,其中熱、流動、機械與電等相關問題都于同一模型內進行研究分析,以促使此模型可模擬仿真系統由啟動到輸出功率整個過程的穩態性能與動態性能。
3 系統仿真分析
3.1 仿真設置
碟式斯特林太陽能發電系統主要參數[8]具體如表1所示。
基于斯特林系統模型針對太陽能發電系統開展穩態性能仿真計算分析,結果具體如表2所示。
通過表1與表2對比分析可以看出,穩態性能仿真結果與表1數據高度吻合。
基于斯特林發電系統性能實驗平臺,采取電加熱模式仿真太陽能針對斯特林發動機發電性能做實驗研究。并選擇某地區2019年10月20日太陽直射強度進行斯特林太陽能發電系統性能仿真分析,太陽直射強度具體如表3所示。

表1 斯特林發電系統主要參數

表2 發電系統穩態性能仿真結果

表3 太陽直射強度 W·m-2
3.2 仿真結果
3.2.1 穩態性能仿真結果
為保持發動機熱端溫度始終不變,其工質壓力應基于太陽直射強度變動實時變化。假設發動機熱端溫度800 K,則系統輸出功率與效率具體如表4所示。

表4 系統輸出功率與效率
由表4可知,太陽能發電系統的發電效率變化處于持續平穩狀態,而輸出功率則與太陽直射強度變化狀態相類似。這主要是因為斯特林發動機的冷端與熱端溫度在穩定不變形態下,發動機的做功量只受系統壓力影響。
3.2.2 動態性能仿真結果
太陽能發電系統充氣中工質壓力突躍時動態性能仿真計算分析結果具體如表5所示。
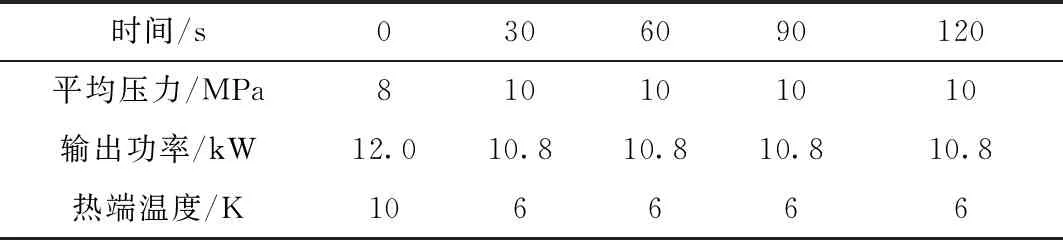
表5 系統動態性仿真計算結果
由表5可知,系統熱端溫度基于太陽直射強度變大且超出設定值狀態時,開啟充氣閥,則工質循環壓力上升,而發動機轉速不變時,發動機熱端溫度則呈現下降趨勢。短時間之內太陽直射強度不持續增加的情況下,系統發電功率表現為先增加,后在溫度降低影響下有所下降。
4 結 論
綜上所述,太陽能熱發電吸收全光譜太陽能,而光伏發電吸收帶光譜太陽能,所以熱發電效率明顯較高,因此本文以發電效率最高的碟式太陽能發電為基礎,設計了斯特林太陽能發電系統,詳細分析了聚光器、跟蹤控制系統、熱點轉換裝置,構建了斯特林系統模型結構,基于此模型對斯特林太陽能發電系統進行了仿真分析,結果表明,太陽能發電系統的發電效率變化處于持續平穩狀態,而輸出功率則與太陽直射強度變化狀態相類似;系統熱端溫度基于太陽直射強度變大且超出設定值狀態時,開啟充氣閥,則工質循環壓力上升,而發動機轉速不變時,發動機熱端溫度則呈現下降趨勢;短時間之內太陽直射強度不持續增加的情況下,系統發電功率表現為先增加,后在溫度降低影響下有所下降。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
汽車維修與保養(2021年8期)2021-02-16 00:28:30
汽車維修與保養(2021年8期)2021-02-16 00:28:18
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
汽車與新動力(2015年1期)2015-02-27 12:11:01
汽車與新動力(2014年2期)2014-02-27 12:10:15
