單繞組無軸承磁通切換電機缺兩相容錯控制
2021-09-14 02:18:42劉汪彤周揚忠
微特電機 2021年9期
關鍵詞:磁場
劉汪彤,周揚忠
(福州大學 福建省新能源發電與電能變換重點實驗室,福州 350108)
0 引 言
無軸承電機是一種利用電磁力使定轉子完全隔離的新型電機。永磁型無軸承電機以其無摩擦、易維護、高效率的優點,在半導體工業、化工、機械、生命科學、飛輪儲能等領域發揮重要作用[1]。普通永磁電機的永磁體安裝在轉子側,為了克服其不易維護、降溫困難的弱點,安裝于定子側的磁通切換電機應運而生。磁通切換電機結構簡單可靠,永磁體不易脫落并且更容易實現降溫處理,因此更適合高速運行工況[2]。磁通切換電機的永磁體是空間對稱分布的,雖然其永磁體在電機旋轉時位置不變化,但也能得到高度正弦的反電動勢[3]。無軸承磁通切換電機(以下簡稱BFSPMM)將無軸承技術應用于磁通切換電機上,擁有無軸承和磁通切換電機的優點。隨著BFSPMM的應用工況越來越嚴苛,其容錯控制的研究也變得越來越重要。
BFSPMM按繞組結構主要分為雙繞組結構和單繞組結構。雙繞組結構在定子上安裝兩套獨立的繞組,一套繞組用于產生切向的轉矩分量,另一套繞組用于產生懸浮力。由于在定子上繞有兩套繞組,其定子繞線空間緊張,鐵心、永磁體利用率較低,兩套繞組之間的耦合復雜。單繞組結構的定子只繞有一套繞組,結構簡單,轉矩和懸浮力分量通常通過多相電機的形式,在數學上進行變換達到解耦控制。因此,想要在缺相的情況下穩定控制轉矩和懸浮力,對電機進行解耦控制是容錯控制的研究重點。
文獻[4]研究了BFSPMM在缺一相故障下的數學模型,其利用o2零序電流做平衡通路,基于電流滯環控制的方法實現了轉矩和懸浮力在帶載情況下的穩定控制。文獻[5]證明了六相無軸承永磁薄片電機僅在缺單一相、缺相鄰兩相和缺對稱兩相才可以穩定控制。
本文針對單繞組BFSPMM,推導了缺相情況下引入零序電流控制的數學模型,提出一種在缺相鄰兩相或缺相對兩相的情況下實現穩定控制轉矩和懸浮力的控制策略和電路拓撲。介紹了拓撲結構及其推導解耦公式的過程,分析了各相電流與轉矩和懸浮力之間的關系。基于MATLAB實現了缺相下的電機仿真。
1 缺相情況下的電流控制公式的推導
1.1 BFSPMM拓撲結構及缺相控制電路拓撲結構
本文所研究電機的拓撲結構如圖1所示。定子部分由12個U形鐵心和12個永磁體沿切向方向依次連接而成。相鄰永磁體所產生磁通集中在定子齒上,具有“聚磁效應”,可以有效減少永磁體的用量。這樣的結構在保證較強轉矩輸出能力的同時,通過調制氣隙磁場實現電機懸浮運行。轉子由帶有10個齒的硅鋼片壓疊而成,電機極對數與轉子齒數目一致[3]。轉子角度的參考起點為A1軸逆時針9°處,如圖1所示。

圖1 電機拓撲結構
對于六相電機可以用T6矩陣進行解耦[7],得到如下電流變換:
(1)
(2)
式中:inT(n=A,B,C,D,E,F)為自然坐標系下相電流中轉矩分量;inS(n=A,B,C,D,E,F)為自然坐標系下相電流中的懸浮分量;ino1為自然坐標系下相電流中的o1零序電流分量(n=A,B,C,D,E,F);ino2為自然坐標系下相電流中的o2零序電流分量(n=A,B,C,D,E,F);iαT、iβT為Clarke變換后靜止坐標系下的轉矩電流;iαS、iβS為Clarke變換后靜止坐標系下的懸浮電流;io1為Clarke變換后靜止坐標系下o1零序電流;io2為Clarke變換后靜止坐標系下o2零序電流。
電機的單相電流在永磁體磁場下產生的懸浮力公式[8]:
(3)
式中:系數kPMDC表示在永磁磁場作用下單位相電流產生的懸浮力所對應的直流偏置;kPM表示在永磁磁場作用下單位相電流產生的懸浮力幅值。這兩個系數均可以由有限元仿真得到。
由式(3),在永磁體磁場的作用下,當僅注入轉矩電流時,可以得到:
(4)
當僅注入懸浮電流時,可以得到懸浮力公式:
(5)
式中:θr為轉子電角度。
當僅注入o1零序電流時,可以得到懸浮力公式:
(6)
當僅注入o2零序電流時,可以得到:
(7)
以上公式表明,在正常運行情況下,轉矩電流和o2零序電流不會產生懸浮力。由于io1為六相供電系統的零序電流,為了讓io1也發揮出懸浮力的作用,必須向中性點通入電流,故提出如圖2所示的逆變器控制電路。
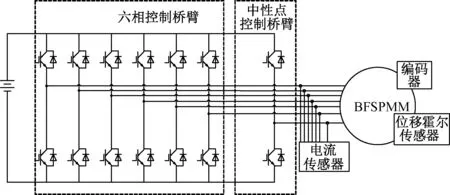
圖2 逆變器控制系統拓撲
1.2 缺兩相時電流公式推導
當電機發生斷路時,容錯控制的方法是在六相電機的數學模型下,使斷路相電流控制為0的條件下對電機進行控制。
以缺A、B兩相為例,將iA=0、iB=0代入式(2),可得:
(8)
(9)
整理可得:
(10)
(11)
(12)
此時,中性點橋臂電流:
(13)
利用有限元分析,分別由式(12)給定iαT、iβT、iαS、iβS單位電流,可以得到圖3。需要注意的是,此時的iαT、iβT、iαS、iβS并不是單純的轉矩平面電流和懸浮平面電流,而是通過控制零序電流在數值上平衡后的結果。在這種控制方式下,由于io1中有iαT分量,又由式(6)表明io1可以產生懸浮力,所以通入的轉矩電流通過零序電流的耦合也會產生懸浮力。在轉矩動態控制時,對懸浮力控制會產生影響。

圖3 缺AB相時,不同電流分量產生的懸浮力仿真
將式(12)代入電機電磁功率公式可得:
(14)
式(14)中只有轉矩電流對電磁功率的關系,表明穩態時轉矩控制部分不會受到懸浮電流的影響。
由于缺AC相和AE相時,無法用iαT、iβT、iαS、iβS來同時表示io1、io2,所以不能用本文方法進行缺兩相容錯控制。
缺兩相的電流給定公式如表1所示。
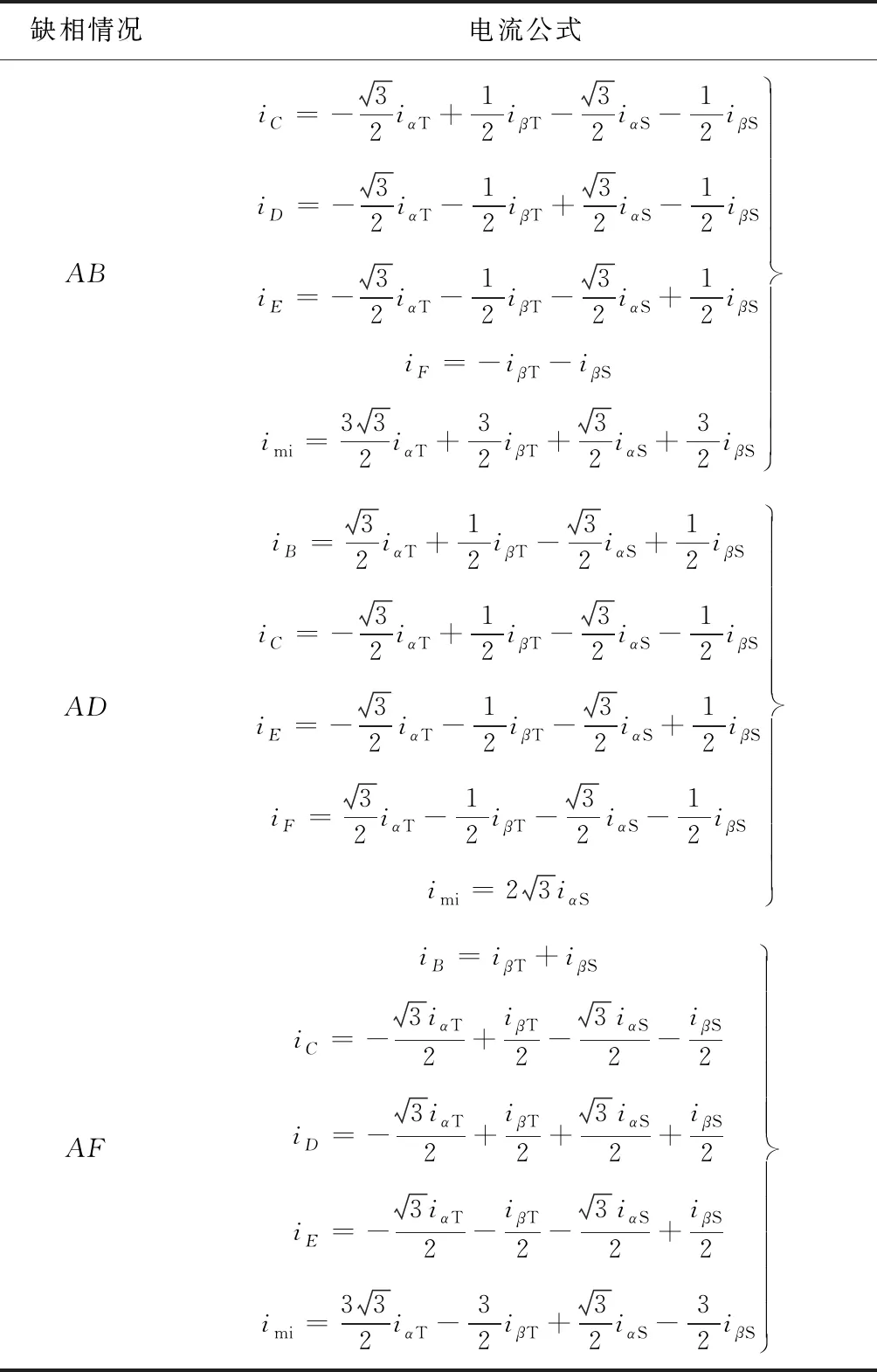
表1 電流給定公式
2 缺兩相情況下懸浮力公式推導
以缺A、B相為例,此時電機中的磁場分量有永磁體磁場、轉矩電流產生磁場、懸浮電流產生磁場和零序電流產生磁場。根據文獻[8],這些磁場會相互影響,對懸浮力的產生起到不同程度的作用。考慮懸浮電流在永磁體磁場下,經過轉矩磁場的偏置作用后,由式(5)得到的懸浮力公式:
(15)
考慮零序電流io1在永磁體磁場下,經過轉矩磁場的偏置作用后,由式(6)得到的懸浮力公式:

(16)
式中:kαSβSdT代表單位iαS懸浮電流或者iβS懸浮電流在單位idT電流建立的磁場下產生的x、y方向的懸浮力基波分量幅值;kαSβSqT代表單位iαS懸浮電流或者iβS懸浮電流在單位iqT電流建立的磁場下產生的x、y方向的懸浮力基波分量幅值;ko1dT代表單位io1電流在單位idT電流建立的磁場下產生的x、y方向的懸浮力基波分量幅值;ko1qT代表單位io1電流在單位iqT電流建立的磁場下產生的x、y方向的懸浮力基波分量幅值。kαSβSdT、kαSβSqT、ko1dT、ko1qT均可通過有限元分析求得。
φαSβSdq、φo1dq分別表示:
(17)
(18)
此時還需要對懸浮電流所產生磁場與零序電流所產生磁場的耦合關系進行分析。在去掉永磁體磁場的情況下,分別通入單位idT、iqT、單位iαS、iβS電流與單位io1電流組合,有限元分析如圖4所示。由于懸浮平面磁場和零序平面磁場耦合產生的懸浮力很小,故在此忽略不計。

圖4 o1電流與其他平面的磁場耦合產生的懸浮力
利用式(15)、式(16)即可得到最終的懸浮力。其中io1提供的懸浮力公式:
(19)
由式(19)可得轉矩電流通過io1產生的懸浮力:
(20)
除去轉矩電流提供的懸浮力外,總的懸浮力:

(21)
缺AD兩相時,io1提供的懸浮力:
(22)
可見缺AD兩相時,轉矩電流不會產生懸浮力。
總的懸浮力:

(23)
缺AF兩相時,io1提供的懸浮力:
(24)
轉矩電流通過io1產生的懸浮力:
(25)
除去轉矩電流提供的懸浮力外,總的懸浮力:
(26)
3 缺兩相情況下電流限幅策略
電機的電流設計都是有上限的,電機運行電流不可能無限增大。在缺兩相的條件下,電機的相電流比健康時增大很多,同時從圖3可以看出,轉子在某些位置時(例如圖3中轉子位置在60°和240°附近,由iβS控制時),需要很大的電流才能輸出期望的懸浮力,增加了電機的控制難度。增加限流是一個必要的環節。通過第二小節的分析可以看出,該電機的電流成分較多,耦合復雜。如果采用直接的相電流限幅,即給定電流超過最大限幅數值,就維持在最大限幅數值上的方案,會造成電流成分不明,耦合混亂的情況,電機將無法正常運行。需要一種新的限流方法,嚴格控制相電流中轉矩分量和懸浮分量的大小。
電流限幅必然會帶來運行性能的惡化,本文以轉矩控制為優先的原則,優先保證轉矩電流的給定。當相電流限幅為ismax、ismin時,對于AB缺相情況,由式(12)、式(13)可得懸浮電流的限幅:
(27)
由懸浮力式(21)可知,x方向懸浮力和y方向懸浮力的比值與懸浮平面α軸的電流和β軸電流的比值線性相關,即可表示:
(28)
式中:a11、a12、a21、a22為化簡所得系數;r為懸浮力縮放系數。令iβS=r1iαS,則:
(29)
將式(29)代入式(28),僅用iαS表示懸浮力,得:
(30)
上式表明,在某一個轉子位置時刻,只要保持iαS和iβS的比值,就可以保持懸浮力出力的方向不變。

圖5 相電流限流步驟流程圖
電流的限幅流程如圖5所示。第一步,把初步的懸浮力算出的給定電流和轉矩電流代入式(27),確定是否存在超限情況,超限的是哪幾個相;第二步,如果有超限幅的情況,記錄超限的懸浮電流,由式(29)確定電流比例系數固定出力方向;第三步,將式(29)計算縮放后的iβS代入式(27),得到可用懸浮電流的最大值和最小值,確定電流iαS選擇的范圍,如果無法求出選擇范圍,令懸浮電流iαS、iβS為0;第四步,將計算出的電流范圍與超限的懸浮電流做對比,最大限度地輸出限幅的懸浮電流。
由于可以確保懸浮力方向的正確性,即使懸浮力因電流限幅達不到給定懸浮力幅值,也可以確保減緩轉子的徑向懸浮位置進一步惡化。
4 缺兩相情況下電機控制策略及仿真
當電機缺A、B相時,控制框圖如圖6所示。

圖6 缺AB相系統控制框圖

電機參數如表2所示。
在AB缺相下,給轉子x方向y方向各施加100 N,初始轉速給定600 r/min,0.5 s時轉速給定750 r/min,相電流限幅為30 A,直流母線電壓為80 V時,仿真結果如圖7~圖9所示。

表2 BFSPMM模型參數
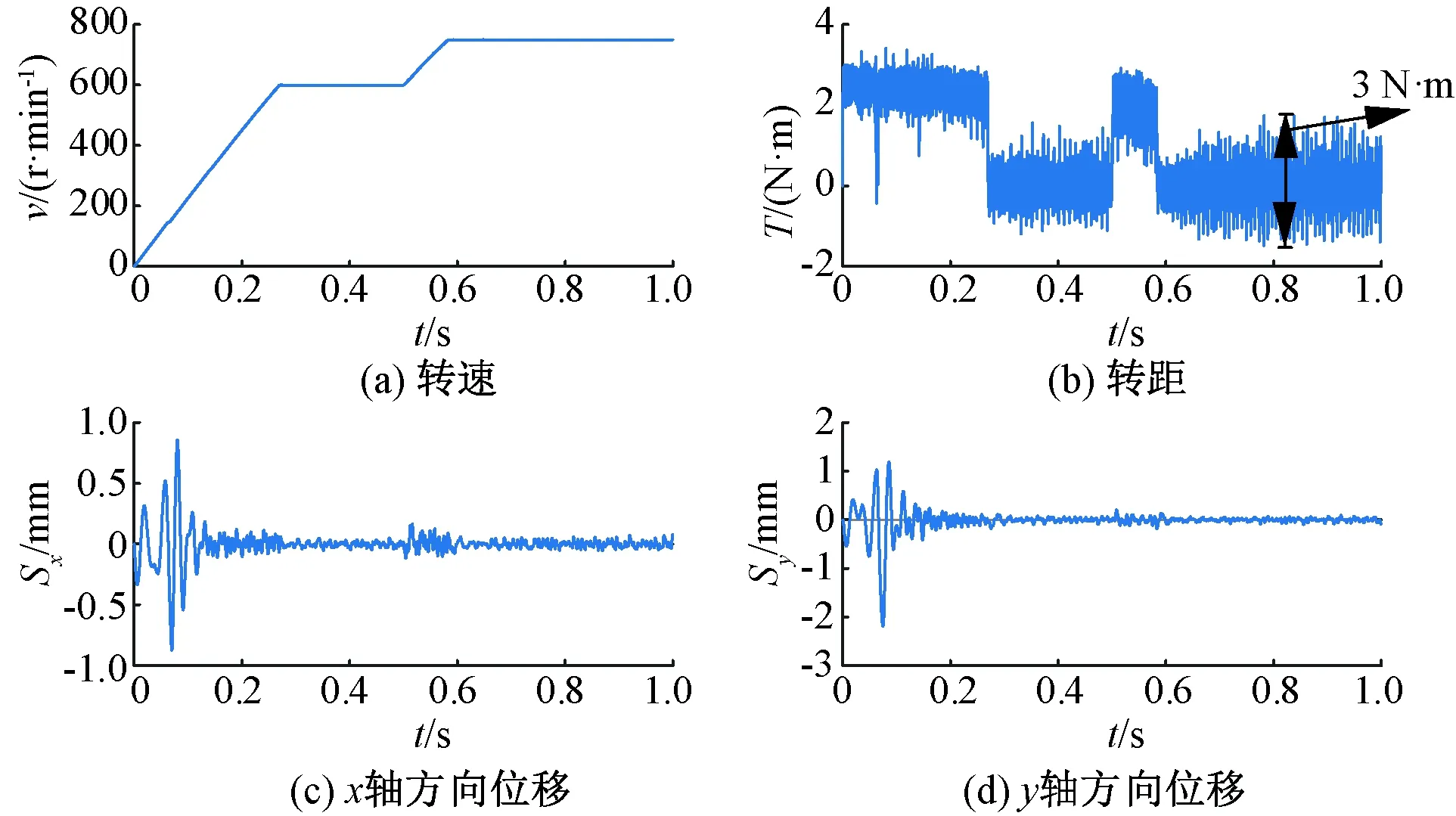
圖7 缺AB相仿真結果(限幅30 A)

圖8 缺AB相各平面電流給定仿真結果 (限幅30 A)

圖9 缺AB相相電流數值仿真結果 (限幅30 A)
由圖7仿真結果可以看出,本文的控制策略可以有效控制電機的轉速和懸浮。起動0.15 s后電機表現趨于穩定。電機在750 r/min穩態時,轉矩脈動在±1.7 N·m以內,轉速脈動在±1.5 r/min以內,徑向位移脈動在±0.005 mm以內。在600 r/min到750 r/min動態過程中,徑向位移脈動在±0.02 mm以內。由圖8、圖9仿真結果可以看出,本文的電流限幅策略有效可行,動態和穩態過程中電流幅值均未超過±30 A。
5 結 語
本文針對單繞組BFSPMM提出一種基于零序電流控制的缺相容錯控制策略,推導了缺相鄰兩相和缺相對兩相的控制公式。最后用Simulink仿真,結果驗證了本文方法的可行性。主要研究結論如下:
(1)控制零序電流的容錯運行策略只適用于缺相鄰兩相和缺相對兩相。隔一相的缺兩相無法應用本文控制策略。由于需要引入零序電流io1參與控制,必須引出中心點,并對其電流加以控制。
(2)仿真結果證明方案可行。電流限幅控制策略可以有效地限制住相電流的大小,實現懸浮運行。
(3)缺相情況下,雖然可以實現懸浮,但是脈動較大,所需要的相電流也較大。需要進一步研究相關控制策略,提高控制效果。
猜你喜歡
當代陜西(2022年6期)2022-04-19 12:11:54
數學物理學報(2022年1期)2022-03-16 06:14:50
娃娃樂園·綜合智能(2021年12期)2022-01-18 05:46:42
華人時刊(2020年13期)2020-09-25 08:21:42
中學生數理化(高中版.高二數學)(2020年1期)2020-02-20 13:22:30
中學生數理化(高中版.高考數學)(2017年3期)2017-05-04 07:15:09
中學生數理化·高二版(2016年12期)2017-02-28 10:08:42
電子制作(2016年1期)2016-11-07 08:42:44
Coco薇(2016年1期)2016-01-11 16:53:24
西華師范大學學報(自然科學版)(2015年3期)2015-02-27 15:31:23