永磁同步電機轉子初始位置辨識研究綜述
2021-09-14 02:26:46李廣林胡志遠
微特電機 2021年9期
劉 利,李廣林,劉 超,劉 佳,曹 靜,謝 宇,胡志遠
(首鋼智新遷安電磁材料有限公司,遷安 064400)
0 引 言
永磁同步電機因其結構簡單可靠、高效率和高功率密度的特點在電氣驅動領域獲得了廣泛的應用[1-2]。永磁同步電機無論是在起動時或是對其精確控制過程中,都需要獲取精確的轉子位置,使用編碼器或旋轉變壓器等設備獲取初始位置的傳統方法不僅增加了系統的成本,也降低了裝置的可靠性,限制了永磁同步電機的應用[3]。鑒于傳統轉子位置辨識方法的限制,研究人員提出利用電機控制系統本身裝置及其電信號進行轉子位置檢測的方法,并成為轉子位置辨識研究的熱點方向。
在辨識轉子位置過程中,根據轉子是否發生轉動,可以將辨識方法分為轉動辨識方法和靜止辨識方法。其中轉動辨識方法是對電機施加固定方向的激勵信號,利用產生的轉矩將轉子旋轉至固定位置,該種方法主要有轉子預定位方法[4]和低頻旋轉信號注入方法[5-6]等;靜止辨識方法則是對電機激勵信號的響應信號進行解析,追蹤響應信號與轉子初始位置間的關系,從而獲取其中包含的轉子位置信息,該類方法主要有脈沖電壓方法[7-9]、旋轉高頻信號方法[10-13]和脈振高頻信號方法[14-16]、非正弦高頻信號法[17-20]等。
大多數轉子初始位置辨識方法分為兩個步驟,第一步辨識轉子軸線位置,第二步辨識轉子磁極極性。在磁極極性辨識方法中,脈沖電壓法和響應電流幅值法應用廣泛,也有相關學者提出利用響應電流二次諧波進行極性辨識的方法。本文結合近幾年研究成果,將在轉子軸線位置辨識和磁極極性辨識兩個方面,對轉子初始位置辨識方法的研究情況作出介紹。
1 轉動辨識方法
1.1 轉子預定位法
當向電機定子中注入固定方向的電壓信號時,會在定子中沿著注入信號方向形成定子磁勢,該定子磁勢與轉子永磁體形成的沿著轉子直軸方向的磁勢相互作用,產生電磁轉矩表示:
Te=KFsFrsinθsr。
(1)
式中:Te表示電磁轉矩;K為轉矩系數;Fs為定子磁勢;Fr為轉子磁勢;θsr為注入信號方向與轉子直軸方向夾角。產生的電磁轉矩方向為沿著轉子直軸的切線方向指向注入信號方向,該轉矩帶動轉子向注入信號方向轉動,直至兩個方向重合,從而完成轉子位置的定位辨識。
轉子預定位辨識方法簡單實用,但是精度較低,無法滿足高性能控制系統的需求,在實際應用時,諸多因素會對該方法的辨識精度產生影響。主要有:
1) 轉子轉動過程中會受摩擦力的影響,尤其是在轉子直軸方向和信號注入方向相接近時,此時電磁轉矩小,受摩擦力影響大,當轉矩和摩擦力達到平衡狀態時轉子靜止,此時轉子直軸方向與信號注入方向存在誤差;
2) 電機與負載連接時會存在負載轉矩,當負載轉矩方向與轉子轉動方向相同時,辨識角度大于實際角度;當負載轉矩方向與轉子轉動方向相反時,辨識角度小于實際角度,且負載轉矩越大,誤差越大。
3) 由于電機定子齒槽造成電機磁阻不均勻現象會產生電機定位轉矩,該轉矩使得在辨識轉子位置過程后,辨識角度與實際角度間仍有一個角度差值,用來平衡定位轉矩,造成辨識誤差。
由于注入信號的方向是隨機的,當沿著轉子實際位置附近的反方向注入電壓信號時,轉子形成的電磁轉矩近似為0,在摩擦力、負載轉矩和定位轉矩等作用下,轉子處于不穩定的轉矩平衡點而保持靜止,此時的信號注入方向并非為轉子實際位置方向,從而造成辨識失敗。為了應對這種情況,文獻[21]提出分三次向電機定子繞組中施加電壓信號,每個信號相差120°電角度的方法,該方法能夠有效避免注入信號與轉子位置方向相反造成的辨識失敗問題,提高了辨識的可靠性,但是也存在辨識時間長的問題。
1.2 低頻旋轉信號法
低頻旋轉信號辨識方法是通過向定子繞組中注入低頻電壓信號使電機產生微動,利用微動轉矩與電流矢量和轉子位置之間的關系,計算出轉子的位置信息。
當向電機定子繞組中注入極低頻率的旋轉電壓信號時,電機電壓方程中電感壓降可以忽略不計,電阻壓降則不能忽略,此時電壓方程表示:
(2)
式中:ωe為轉子電角速度;ψf為永磁體磁鏈。注入的低頻信號表示:
udq=Uampej(ω-θe)
(3)
式中:Uamp為注入電壓幅值;ω為注入旋轉電壓角速度;θe為轉子初始位置角度。當注入信號的頻率足夠低時,d軸壓降主要為電阻產生,q軸壓降則主要是反電動勢,將響應電流變換到αβ坐標系中的形式[22]:
(4)
式中:IA-d,IB-q分別為d、q軸電流響應幅值。由式(4)可知,響應電流中包含轉子位置信息θe,為了分離轉子位置信息,對式(4)左右同乘ejωt,得到:
(5)
式(5)中,由注入信號頻率2倍頻率的周期分量和包含轉子位置信息的常值分量構成,為了得到轉子位置信息,對式(5)進行傅里葉分析運算提取常值分量:
(6)
再對式(6)進行反正切運算,即可得到轉子初始位置角。
由于該種方法在辨識過程中電機會發生微動,因此對電機的工作環境有一定的要求,當電機連接負載時將無法完成辨識過程,同時還存在對電機參數依賴性高,當辨識位置與實際位置相接近時準確度降低等問題。
2 靜止辨識方法
2.1 脈沖電壓法
脈沖電壓法是向電機定子中注入一系列電壓脈沖信號,該信號具有相同的幅值,沿正反兩個方向分別注入,利用永磁體直軸方向的磁路飽和狀態和磁導率均與其它位置不同,導致在不同方向注入脈沖信號對應的響應電流中包含轉子位置信息。
當轉子位置θ為±π/2時,轉子永磁體磁路和A相繞組軸線正交,轉子在繞組上的磁通分量為0,繞組飽和度最小,電感值最大;當θ為0時,轉子磁動勢和A相繞組磁動勢方向相同,造成A相磁路飽和程度最大,電感值最小;當θ為π時,轉子磁動勢和A相繞組磁動勢方向相反,去磁效果使得磁路飽和程度降低,電感值較θ為0時電感稍大。基于電感的飽和效應,造成電感值隨轉子位置呈現近似正弦變化規律。分析可知,當轉子位置位于0和π時,其對應電感差值最大。
文獻[23]通過控制功率管的通斷使電機兩相導通,非導通相懸空的方法向電機中注入高頻低壓脈沖信號,利用RL電路電流響應原理辨識線電感值,再將線電感通過Clarke變換轉換到αβ坐標系中,其電感形式:
(7)
式中:Lg2為自感二次諧波幅值。利用反正切運算可以得到轉子軸線位置。
文獻[24]利用轉子在不同位置所對應的電感差值不同的原理,分別向繞組中沿著正反兩個方向注入一系列幅值相同的電壓脈沖,利用響應電流幅值的大小判斷轉子位置。當注入正反方向電壓矢量對應的電流幅值差值最大時,該電壓矢量對應位置即為轉子軸線位置。為了提高轉子位置檢測可靠性,文獻[25]提出等寬電壓脈沖和電壓矢量判斷相結合的方法來提高轉子位置辨識的可靠性。該方法將電壓矢量判斷得到電壓矢量與等寬電壓脈沖區域比較,如果電壓矢量在區域內,即表明該矢量對應的角度位于轉子磁極位置附近。
2.2 旋轉高頻信號法
高頻信號法是向電機繞組中注入高頻信號,利用電機的凸極特性,在電流響應中分離出轉子位置信息[26-28]。高頻信號法可以分為旋轉高頻信號法[29]和脈振高頻信號法[30],這兩種方法是以高頻信號注入軸系的不同進行區分。
旋轉高頻信號法原理是向電機的靜止坐標系α,β中注入三相對稱的高頻電壓信號,為了找出響應電流信號與轉子初始位置間的關系,對響應高頻電流信號進行采樣和信號處理。設定注入的高頻信號形式:
(8)
式中:uαh,uβh表示在兩相靜止坐標系中的高頻電壓信號;Uh,ωh分別為注入的高頻電壓信號的幅值和頻率。將注入信號式(8)代入電機電壓方程中并進行轉換,得到兩相靜止坐標系中響應高頻電流信號形式:
(9)
式中:L0=(Ld+Lq)/2為均值電感;L1=(Lq-Ld)/2為差值電感;θe為轉子實際位置。將上式轉換為矢量形式:
(10)
由式(10)可知,響應電流的負序分量中包含轉子位置信息θe,在提取θe時可以利用同步旋轉濾波器獲取負序分量,利用低通濾波器濾除負序分量中的高頻量,再對濾波后的信號進行反正切運算,最終得到轉子磁極位置。
高頻旋轉信號法利用了永磁同步電機的結構凸極特性對轉子位置進行辨識,因此該方法不適用于表貼式結構的電機轉子位置辨識。該方法辨識穩定性強,但是也存在精度差、辨識結果受數字控制采樣和計算延時等因素的影響,由于帶通和低通濾波器產生的系統相移的影響,辨識結果會小于實際值。針對這些問題,文獻[31]利用影響辨識精度的因素在正序和負序信號中的相關性,通過提取正序信號中的相位偏差,對負序信號中的相位差進行補償,從而提高辨識精度。將濾波器對辨識結果產生的誤差用角度α表示,將數字控制過程中產生的影響誤差用角度β表示,則考慮兩種誤差時的高頻響應電流信號應為:
(11)
將式(11)中正序分量和負序分量中的高頻分量分別通過同步旋轉濾波和低通濾波去除,再利用反正切分別獲得轉子軸線位置信息和誤差信息,再將獲取的兩個信息求和,從而消除誤差的影響,提高辨識精度。
2.3 脈振高頻信號法
在估計旋轉坐標系中注入的高頻信號形式:
(12)
(13)
(14)
利用鎖相環對轉子位置誤差信號進行鎖向,使誤差信號趨近于0,此時估計的轉子位置角即處于轉子實際軸線位置處。信號處理過程如圖1所示。
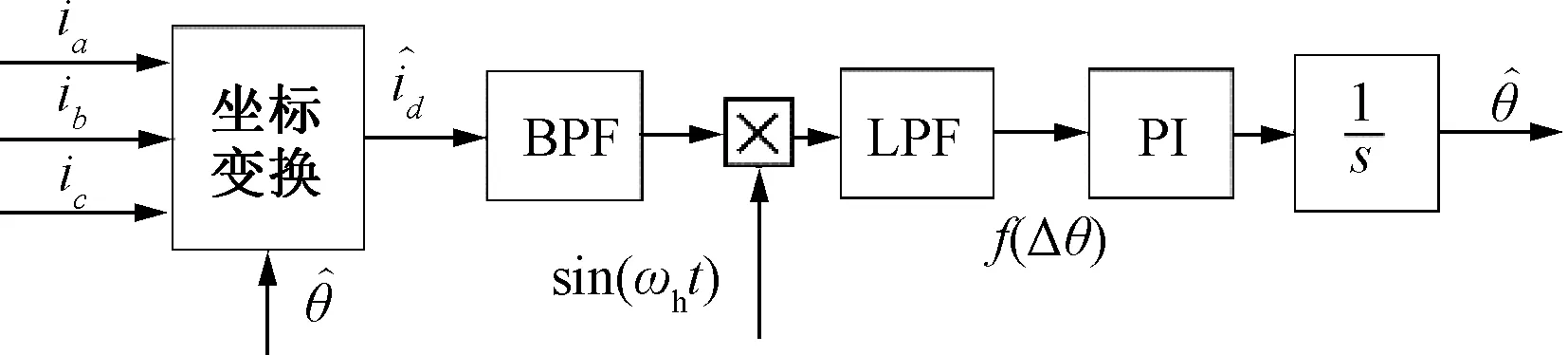
圖1 脈振信號法信號處理圖
脈振高頻信號法具有辨識精度高,同時受非線性因素影響小的特點[32],但是在信號處理過程中,濾波環節會對系統的幅值和相位產生影響,從而降低辨識精度。針對該問題,文獻[33]提出一種無濾波器的高頻脈振信號辨識方法。該方法利用估計直軸中的高頻正弦信號,消除估計交軸中的高頻正弦信號,得到轉子位置誤差信號,利用鎖相環對誤差信號進行鎖相處理,使誤差信號趨近于0,從而得到轉子軸線位置的估計值。該方法去除了濾波環節,從而提高辨識精度。
2.4 非正弦高頻信號法

(15)
式中:k表示離散采樣時刻。將方波信號代入電機方程中,并經過坐標變換得到旋轉坐標系中的響應電流形式:
(16)

(17)
再利用鎖相環對誤差信號進行鎖相可以獲取轉子磁極位置。
在該方法中,由于鎖相環獲取轉子位置過程中存在不穩定零點,會造成辨識失敗。針對這種情況,文獻[34]提出在靜止坐標系中注入方波信號的方法,有效避免了不穩定零點造成的辨識失敗問題。
(18)
將高頻三角波進行傅里葉分解后得到:
(19)
將上式代入電機的電壓方程中,得到估計坐標系中的電流響應:
(20)
(21)
再利用鎖相環對轉子位置誤差信號進行鎖相,得到轉子位置信息。
比較方波和三角波辨識方法的信號處理過程發現,兩種方法均采用直接調制方法,即將響應電流與調制信號相乘得到位置誤差信號,再對誤差信號進行鎖相。該方法避免了濾波環節對辨識精度的影響,但是也存在調制后的誤差信號中疊加高頻毛刺信號干擾影響辨識精度的問題。
3 磁極極性辨識
在轉子初始位置辨識方法中,無論是轉子微動法、脈沖電壓法或是系列高頻信號辨識方法,均無法辨識出轉子磁極極性,還需要對磁極極性進行辨識。在磁極極性辨識方法中,大多是利用磁路飽和特性原理,求出轉子軸線位置正反方向的響應電流或是等效電感的大小來進行極性判斷。
3.1 等寬脈沖電壓法
在電機設計過程中,為了能夠充分利用材料性能,通常將磁路設定在輕微飽和狀態。當繞組中電流形成的磁勢和轉子d軸正方向同向時,會加深磁路飽和,反之會降低磁路飽和程度。利用磁極飽和效應,向辨識出的轉子軸線位置的正反方向分別注入幅值和寬度相等的電壓脈沖,當注入方向和磁極方向同向時,磁路飽和程度加深,電感變小,響應電流峰值較大;當注入方向和磁極方向相反時,磁路飽和程度減小,電感增大,響應電流峰值較小,利用兩次響應電流大小判斷磁極極性。該方法由于需要檢測電流,提高了對系統的要求,當測量精度有限時會降低準確性。針對該問題,文獻[36]提出檢測響應電流衰減時間辨識磁極極性的方法,有效提高了準確性。
3.2 響應電流二次諧波法
采用脈振高頻信號法辨識轉子初始位置時,在響應電流的高頻諧波成分中包含了轉子磁極極性信息,可以對響應電流的諧波進行調制來獲得磁極極性。該方法不需要額外注入信號進行磁極極性辨識,且初始位置辨識和磁極極性辨識可以同時進行。
經過轉子初始位置辨識后,轉子軸線位置與實際位置重合時,估計直軸的脈振高頻響應電流信號表示[37]:
λ1cosφh1cos(2ωht)-λ2sin(3ωht)]
(21)
式中:λ0、λ1、λ2分別為基波、一次諧波、二次諧波幅值;φh1為一次諧波中的初始相位角。由式(21)可知,在直流部分和二次諧波部分中均含有磁極信息φh1,而選擇二次諧波部分進行辨識可以去除測量直流量偏移對辨識結果的影響。
對響應電流按照圖2進行信號解調,得到解調后的直流分量信號:

圖2 信號處理圖

(22)
3.3 響應電流幅值法
在向電機繞組中注入脈振高頻信號時,響應電流的幅值可以表示[31]:
(23)
通過注入直流偏置和高頻脈振的混合信號,利用直流偏置信號改變磁路飽和程度對電感值Ld進行改變,使得高頻脈振信號對應的響應電流幅值也隨之變化。向初次辨識方向注入兩次混合信號,兩次混合信號中的直流量幅值不同,脈振信號幅值相同。當初次辨識方向即為轉子實際位置時,直流偏置信號使磁路進入飽和區域,電感值隨著偏置電流的增大而減小,此時幅值大的直流偏置信號對應的響應電流幅值也變大;當初次辨識位置位于轉子實際位置的反方向時,注入的直流偏置信號使磁路進入線性區,電感值隨著偏置電流的增大而變大,此時幅值大的直流偏置信號對應的響應電流幅值小。通過比較響應電流幅值大小實現磁極極性辨識。
該方法在初次辨識位置與轉子實際位置相反時容易出現辨識失敗的情況。因為在磁路的線性區內電感值近似定值,兩次直流偏置信號引起的電感值變化量很小,在疊加信號采樣誤差等情況下容易出現辨識失敗情況。為了提高辨識精度,文獻[32]提出在初次辨識位置的正反方向分別施加幅值相同的直流偏置和高頻脈振混合信號,使得在兩次注入過程中在磁路的飽和區和線性區分別有辨識信號,增大了兩次信號引起的電感值的差值,增大響應電流信號幅值的差值,提高了辨識精度。
4 結 語
以轉子預定位和低頻旋轉信號方法所代表的轉動辨識方法中,其優點在于辨識過程簡單,但是存在辨識精度容易受到摩擦和負載的影響,該影響在辨識位置接近轉子實際位置時尤為明顯,且該方法由于電機的轉動而使得應用場景受到限制。
脈沖電壓法理論上可以實現高精度的轉子位置辨識,且在辨識過程中可以將初次位置辨識和極性辨識結合起來,達到減少辨識時間和注入信號次數的目的。但在實際應用中,當注入脈沖電壓矢量的角度差縮小到一定范圍時,不同電壓矢量對應的電感差異性降低,且受限于采樣電路精度和干擾的影響,無法保證辨識精度。
高頻信號注入法利用電機的凸極特性實現轉子位置辨識,該方法根據注入信號參考軸系的不同而分為旋轉高頻信號法和脈振高頻信號法。旋轉高頻信號注入法對電機參數敏感性低,且易于工程實現,但是該方法只適用于有明顯凸極效應的內嵌式永磁電機。脈振高頻信號法則由于可以在定轉子氣隙間產生飽和凸極效應,因此同樣適用于表貼式永磁同步電機。由于轉子凸極的對稱性的存在,無論采取何種方法均需要進行磁極極性辨識[38]。
相比于旋轉高頻信號法和脈振高頻信號法中注入的正弦信號而言,注入方波和三角波的非正弦信號具有更高的系統動態響應,可以提高系統帶寬和簡化載波分離難度[19],從而去除了信號處理過程中的濾波環節,但是該方法會產生更大的損耗。
隨著永磁同步電機在高精度控制場景中的廣泛應用,勢必會對其起動速度、控制精度提出的更高要求。通過比較各種辨識方法的優缺點可知,高頻信號注入方法因較高的辨識精度而受到更多的關注,正朝向提高精度、最優化注入信號、簡化信號處理、降低辨識損耗等多元化方向發展。
猜你喜歡
計算機應用(2022年2期)2022-03-01 12:33:42
計算機應用(2021年4期)2021-04-20 14:06:36
鴨綠江(2021年35期)2021-04-19 12:24:18
計算機應用(2021年1期)2021-01-21 03:22:38
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2018年11期)2018-08-04 03:25:42
Coco薇(2016年2期)2016-03-22 02:42:52
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年4期)2015-05-19 14:47:56