無人船搭載聲吶設備在大崗山水下檢測中的試驗應用
2021-09-15 07:16:02彭濤,黃會寶,高志良,江德軍
四川水力發電 2021年4期
彭 濤, 黃 會 寶, 高 志 良, 江 德 軍
(國能大渡河流域水電開發有限公司,四川 成都 610041)
1 概 述
大崗山水電站位于大渡河干流的中游,電站樞紐主要由攔河混凝土雙曲拱壩、泄洪消能建筑物、引水發電建筑物等組成,最大壩高210.0 m,電站裝機容量2 600 MW。大崗山水庫平面呈條帶狀,為河道型水庫,水庫正常蓄水位1 130 m時,壩前最大天然壅水深度約120 m。大崗山庫區屬于大渡河中游產沙區,壩址河段多年平均懸移質年輸沙量2430萬t(其中瀘定水文站-大崗山壩址區間的多年平均懸移質輸沙量約1428萬t),多年平均含沙量0.773 kg/m3,輸沙量主要集中在汛期(6~9月),汛期多年平均懸移質輸沙量2 200萬t,占全年輸沙量的90.5%,汛期平均含沙量1.120 kg/m3。該河段多年平均推移質年輸沙量為32.4萬t。作為大渡河干流的水電站,了解蓄水初期水庫泥沙淤積情況對指導水庫運行十分重要,該測量工作積極按照大渡河公司智慧企業建設目標,改進了適應高山峽谷地區水庫的無人船測量系統,在大崗山壩前水下地形測量試驗,實現了水下地形的自動化數據采集和航行,有效提高了作業效率,減少了測量人員的涉水風險。
2 無人船測量系統
2.1 系統組成
無人船搭載聲吶設備測量系統不僅能夠解決高山峽谷區域人員作業高風險的難題,還能安全開展緊急情況大壩及邊坡的水下測量,為大壩運行性態提供可靠數據支撐。測量船系統主要由船體、動力系統、船載主控系統、設備供電系統、聲吶系統、船體和測深設備導航定位系統、無線傳輸系統等組成。
2.1.1 船體選型及設計
考慮船體內需布置發電機、電池、多波束等設施設備,經統計計算,船體滿載情況總重約300 kg(包含船身),經多次選型比較,最終確定設計無人船排水量為450 kg,船體長度3 m,寬度1.45 m,整體采用全鋁材料焊接,相對重量較輕。船體和多波束設備設計建模及實物見圖1。
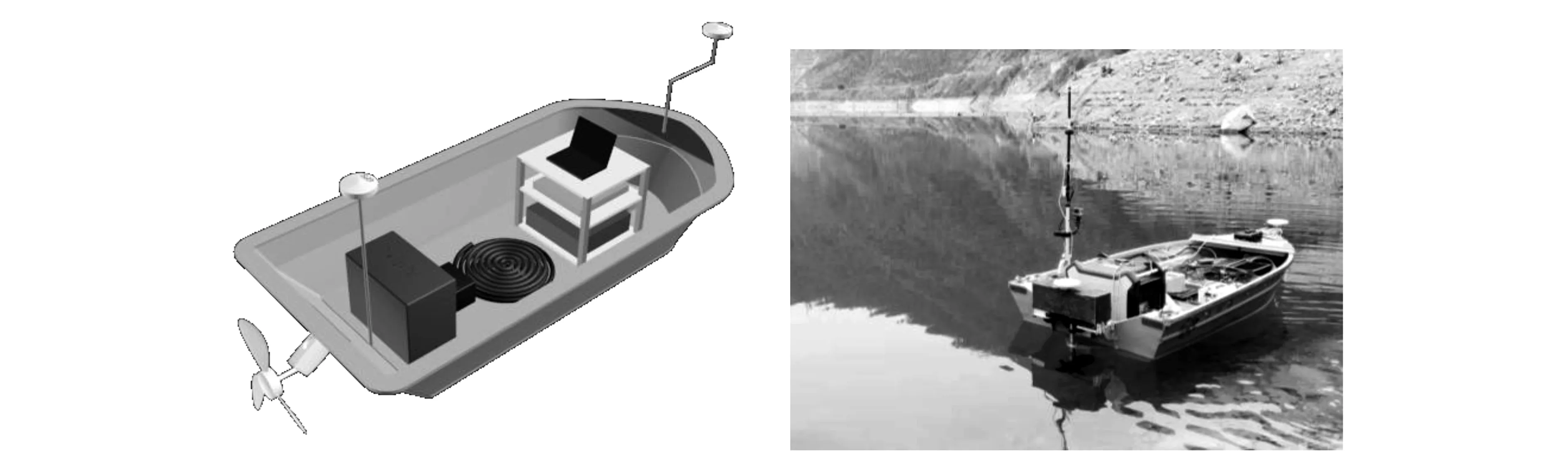
圖1 船體搭載多波束設備設計建模圖及實物圖
2.1.2 動力系統及設備供電系統
多波束設備在使用過程中對運行環境具有一定要求,在穩定,平穩的環境中可以得到高質量的數據,因此,在動力方面使用了水下電動機直驅螺旋槳推動船體前進。為提高靈活性,采用矢量控制轉向。以電機為動力的驅動在控制方面相對準確容易,只需要向電動機調速器發送相應PWM信號,即可調節電機轉速,控制輸出功率,達到船速的控制。該無人船為推力系統配置了三元鋰電池為電機提供動力電源。由于庫區長、范圍廣,無人船需要具備長距離航行能力,如果單純使用電池驅動,那么,整個船體將裝載大量電池,使船體重量直線上升,會讓拆裝,運輸,船體下水變得困難。鑒于純電動驅動需要在使用前對電池進行充電,充電時間和充電附屬設施龐大。從以上性能及使用便捷性考慮,決定采用混合動力系統,即發電機發電給電池充電,電池直接驅動電機,一邊使用一邊充電,即具有良好的控制性能,又可以實現長距離航行。同時,拆裝維護,運輸下水,都由于質量變輕和模塊化的設計而變得便捷。
2.1.3 船載主控系統
無人船需要實現自動駕駛、自動避障、自動導航等功能,是實現無人船測量系統的關鍵技術。船載主控系統采用GNSS衛星導航和捷聯慣導的組合導航系統。本系統采用已廣泛應用到復雜系統設計的分級遞階控制系統結構,將控制系統分為組織級、協調級和執行級,并保證系統的強魯棒性和容錯性。以單片機作為控制器,各傳感器反饋構成多元閉環控制系統。本次試驗為簡化無人船的制造過程,采用了水下動力矢量控制方式,該方式在船的控制中具有很高的靈活性,但在控制方面的難度也是最大的,經過多次測試,調整好相關的PID參數和其余控制參數后,無人船能準確地按規劃航線行駛,以1.7 m/s的速度壓線航行,偏離度不超過0.5 m。
2.1.4 聲吶系統
聲吶系統主要包含Teledyne Reson T20P超高分辨率多波束、Reson SVP-70表面聲速儀、PosMV SurfMaster船載定位定姿系統、PDS多波束實時數據采集后處理軟件及Valeport MiniSVP剖面聲速儀。多波束測深系統是一種多傳感器的復雜組合系統,是現代信號處理技術、高性能計算機技術、高分辨顯示技術、高精度導航定位技術、數字化傳感器技術及其他相關高新技術等多種技術的高度集成載有多波束測深系統的船,每發射一個聲脈沖,不僅可以獲得船下方的垂直深度,而且可以同時獲得與船的航跡相垂直的面內的多個水深值,一次測量即可覆蓋一個寬扇面;與單波束回聲測深儀相比,多波束測深系統具有測量范圍大、測量速度快、精度和效率高的優點。
2.1.5 通信鏈路系統
根據無人船實際搭載多波束設備的情況,該船通信鏈路系統可以分為三大部分,第一部分是船載主控系統數據鏈路,第二部分是多波束遠程操作鏈路,第三部分是多波束系統定位差分鏈路。無人測量船運行環境為高山峽谷區域,大山會阻擋無線信號,但無人船的控制及航行情況需要時時監控,鑒于測區移動信號基本覆蓋的情況下,無人船主控系統鏈路數據使用2G-4G通信,以保障長距離通信,同時還搭載了一套900 MHz的數傳電臺作為無人船的雙路冗余通訊系統,在無2G信號的地方電臺作為備份使用。多波束遠程操作鏈路由于數據承載量大,故采用高帶寬的通信設備來承擔,使用內建網絡,直接連接無人船上多波束控制電腦,由岸上人員直接同屏遠程操作。導航差分鏈路由于其數據量小,使用的是大功率遠程433 MHz頻率無線電臺通信,以滿足在大山區遠距離通信(基站位置合理的情況下可達5 km)。
2.2 測量系統的原理
無人船測量系統是整個無人船系統的核心,承擔著水深測量和導航定位任務。多波束測深系統是利用發射換能器陣列向水底發射寬扇區覆蓋的聲波,利用接收換能器陣列對聲波進行窄波束接收,通過發射、接收扇區指向的正交性形成對水底地形的照射腳印,對這些腳印進行恰當的處理,一次探測就能給出與航向垂直的垂面內上百個甚至更多的水底被測點的水深值,從而能夠精確、快速地測出沿航線一定寬度內水下目標的大小、形狀和高低變化,比較可靠地描繪出水底地形的三維特征。因此,多波束測深系統把測深技術從點、線擴展到面,并進一步發展到立體測深和自動成圖,適合進行大面積的水底地形探測。基本測量原理及多波束系統鏈接見圖2。

圖2 無人船測量原理及多波束系統鏈接圖
3 大崗山水電站壩前水下地形測量應用
3.1 測區現狀
大崗山水庫蓄水后,入庫泥沙將在庫內落淤,淤積三角洲到達壩前或田灣河引水泥沙在壩前淤積后,在取水和泄流過程中,泥沙或沙石粒被水流帶動,其勢能和動能造成水工建筑物混凝土破壞和磨損,影響到取水口前各泄水建筑物的安全運行。大崗山壩前至泄洪洞進口區域處于河道轉彎處,測區最大水深大于200 m,水面寬度在350~430 m之間,測區范圍邊坡存在多處不同程度的垮塌,傳統測量作業方式存在較大安全隱患,因此,采用無人船搭載聲吶設備在大崗山壩前開展作業,測區范圍見圖3。
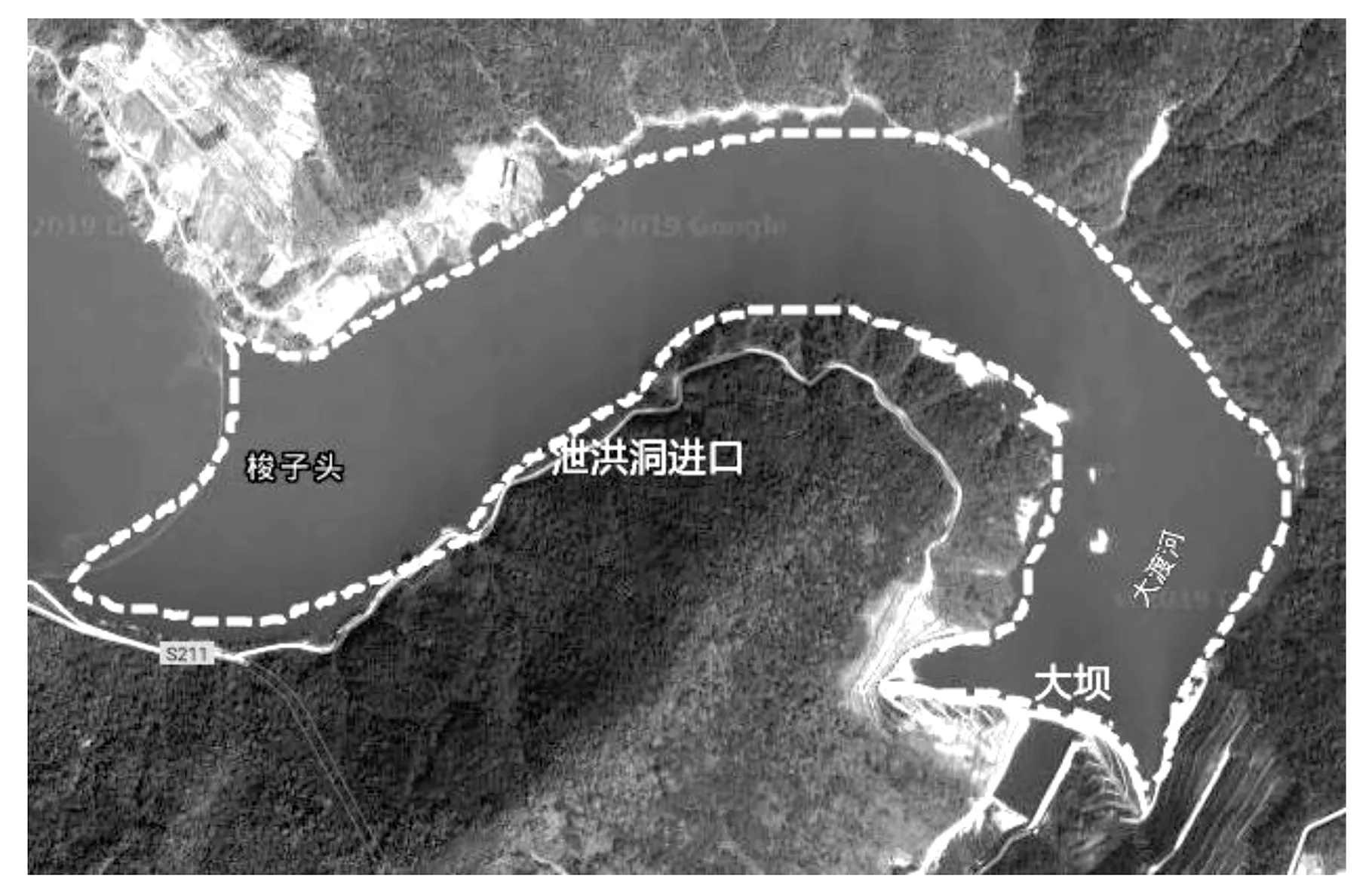
圖3 大崗山壩前測量區域示意圖
3.2 施測過程
采用無人船搭載多波束水下測量系統對泄洪洞進口至壩前庫段開展水下測量,主要沿水流方向布設計劃測線,以平行于等深線為大體原則布設測線,對泄洪洞進口至壩前庫段水下地形進行探測。無人船現場沿計劃測線自動行駛,直到采集到的數據完全覆蓋住測區為止。測線布置見圖4。

圖4 泄洪洞進口至壩前庫段測線布置圖
大崗山水電站處于高山峽谷區域,衛星信號易被山坡遮擋,為確保多波束接收到準確的GPS定位信號,需將RTK基準站架設在坡度相對較緩、高度較高的位置,且選擇在衛星信號較好的時間段開展多波束水下探測工作,考慮以上條件要求,基站假設于泄洪洞進口上游攔污漂碼頭開闊地帶。
無人船搭載多波束測量過程中,存在一次因信號丟失導致無人船自行返航情況,經修改設置后,無人船繼續航線行駛開展測量任務,多波束實時采集通訊回傳鏈路通暢。同時,為進一步測試無人船作業過程中的穩定性,此次無人船搭載多波束開展水下測量共作業3次,總共運行時間25 h左右,實際航行里程42 km,試驗過程中無人船運行性態良好。
3.3 測量成果
3.3.1 檢測成果
采用無人船搭載多波束探測技術對壩前水域進行全覆蓋水下三維掃描,獲取壩前水域水下地形三維點云數據,三維點云數據截圖(圖5),利用實測的三維點云數據生成近壩庫區三維曲面圖(圖6),繪制壩前水域1∶100地形圖(圖7)。
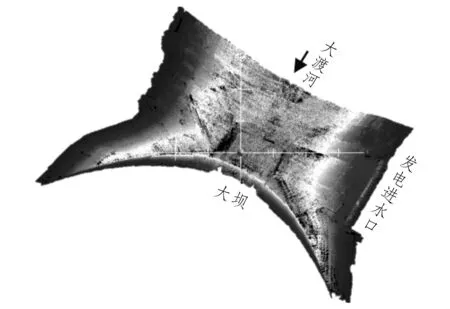
圖5 壩前區域水下三維點云數據截圖
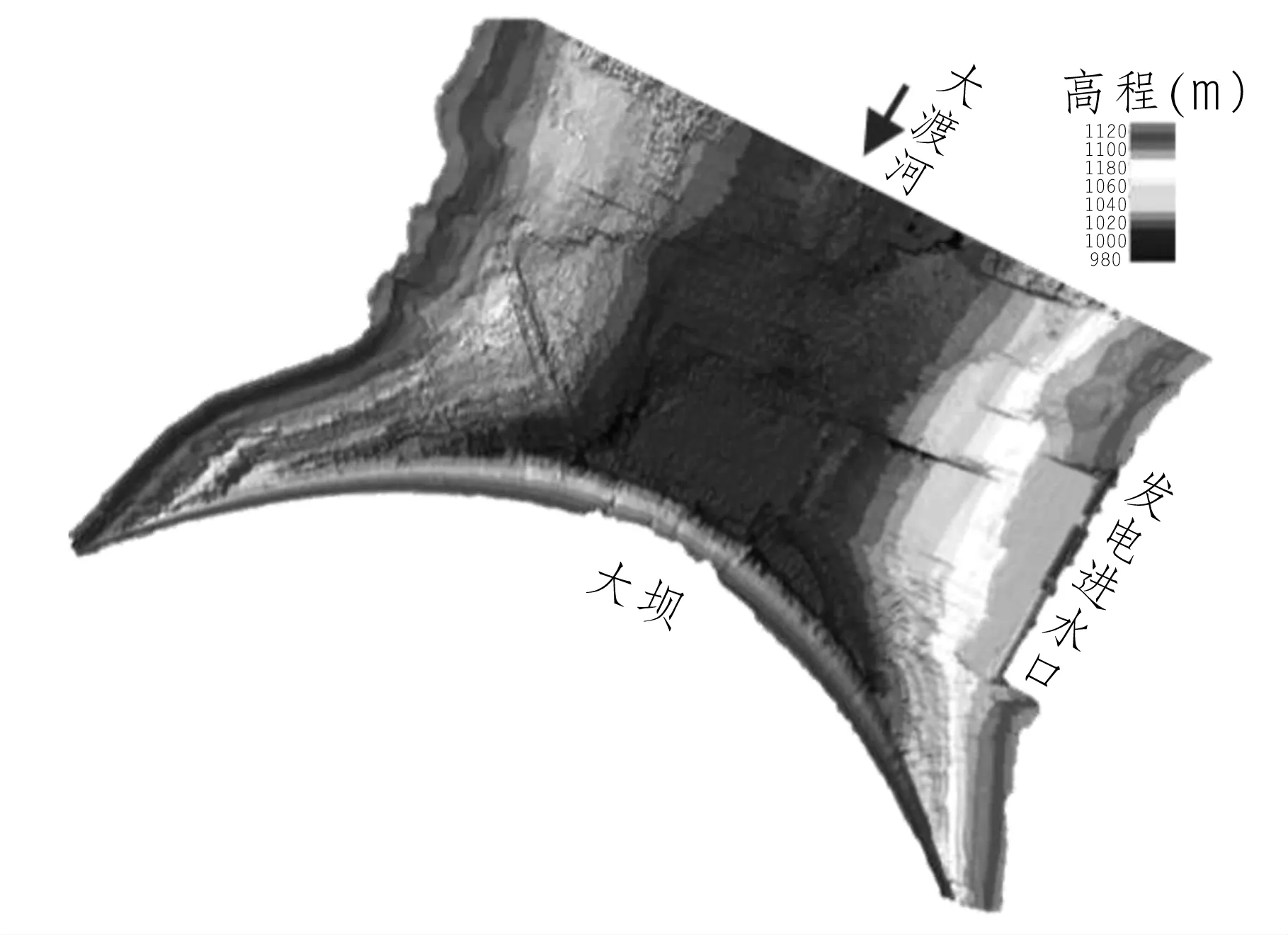
圖6 壩前區域水下三維曲面圖
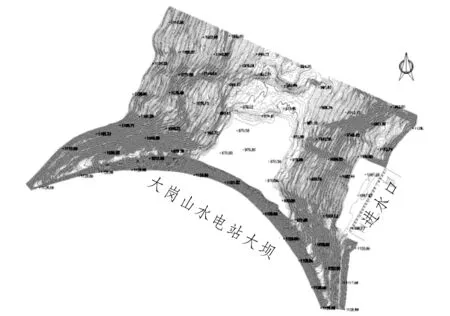
圖7 壩前區水下地形圖
3.3.2 測深精度
測深精度主要從相鄰測線間點云的重疊度來判斷,以兩條相鄰測線為例,其重疊情況見圖8。由圖8可見,相鄰測線點云高差為0.05 m,滿足《水利水電施工測量規范》中:當水深小于等于20m時,高程中誤差為±0.2 m,當水深大于20 m時,對測深點高程中誤差為±0.01H(H為水深)的要求。
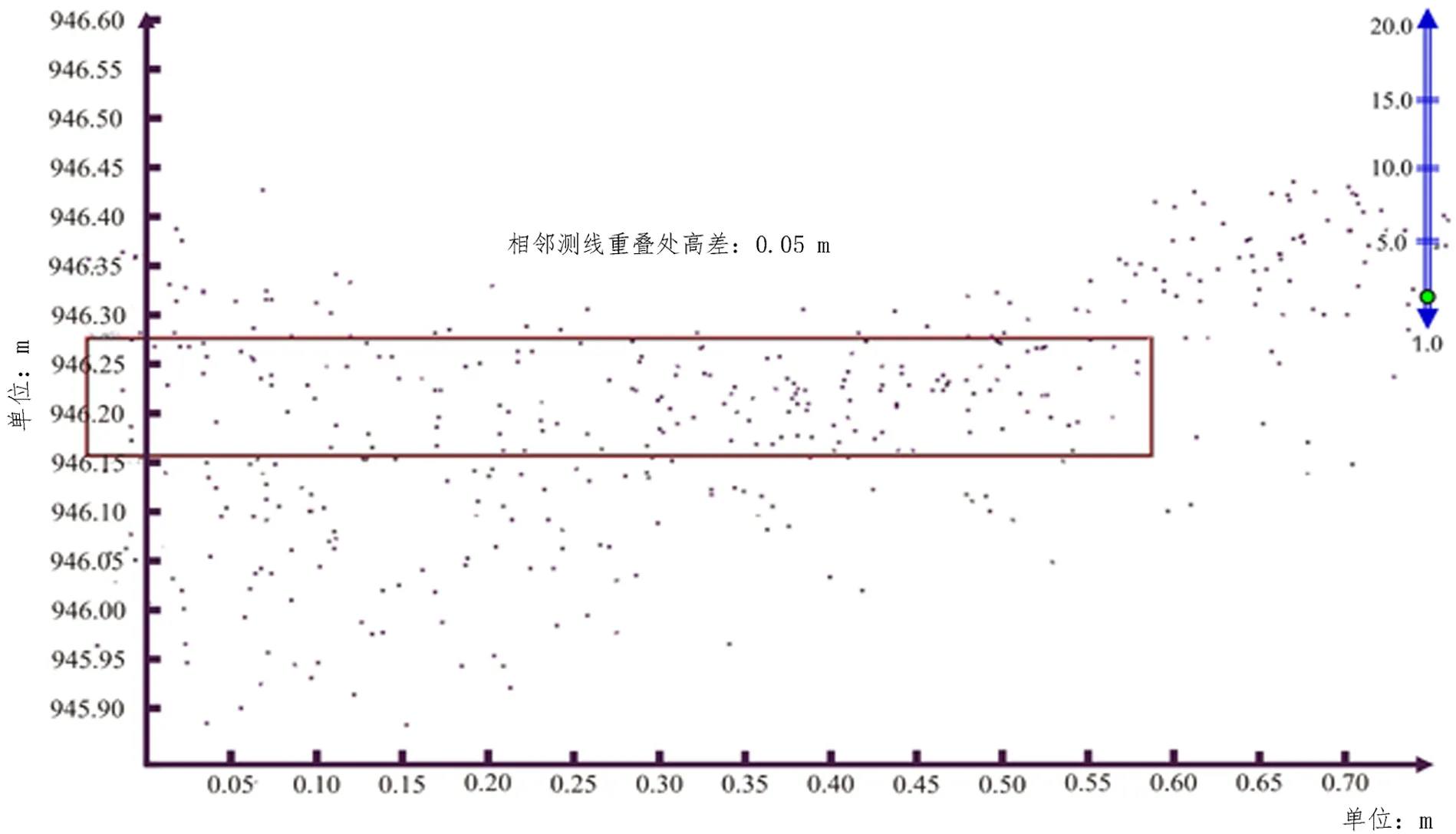
圖8 相鄰測線點云重疊情況圖
4 結 語
利用無人船搭載聲吶設備,開展大崗山泄洪洞進口至壩前庫段的水下測量工作,數據結果很好地反映了庫區水下地形情況,順利完成了該庫區水下地形的測量任務。
試驗表明,無人船搭載聲吶設備能夠高效、安全完成高山峽谷地區庫區測量任務,且具有高度的自動化,避免因人員在船上作業帶來的安全風險,適用于水電站庫區、淺灘及緊急情況下的水下地形測量。當前無人船系統多數尚處于自動化階段,在智能規劃航線、智能主動避障及通信傳輸控制上還存在不足,但隨著智能化、集成化水平的提高以及5G通訊技術的投入使用,這些問題都將得到更好的解決,也必將使無人船系統更加智能,使測量的精度、可靠性更高,并能適應更復雜的作業環境。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
家庭影院技術(2017年9期)2017-09-26 03:41:45