城市快速路協同控制方法優化研究
2021-09-15 02:08:26程可
交通科技與管理 2021年26期
程可

摘 要:本文基于快速道路傳統控制方法,以城市快速路段為研究對象,對匝道控制與可變限速控制協同應用進行研究,提出一種新的城市快速路控制策略,仿真結果表明該策略能夠有效改善控制路段交通流運行狀態。
關鍵詞:城市快速路;交通瓶頸;協同控制;匝道控制;可變限速控制
中圖分類號:U491 文獻標識碼:A
1 研究基礎
1.1 國內外研究現狀
1.1.1 匝道控制
匝道控制按照控制范圍劃分,可分為單點控制與協同控制;按照控制方式劃分,可分為定時控制與感應控制。根據選取控制參數的不同,感應控制又可以分為需求-容量控制、占有率控制以及可接受間隙控制。
國外研究主要集中在以下方面,Wattleworth等提出一種定時控制方法,以流入流量最大為目標函數,道路通行能力為約束控制入口匝道的調節率。由于定時控制是一種靜態控制手段,匝道調節率根據歷史數據預先設定,面對交通狀況快速變化時控制效果較差。Papageorgiou等基于經典自動控制理論,提出一種以占有率為控制變量的匝道單點反饋控制算法ALINEA。
國內學者中,楊曉光等[1]較早開展關于城市快速路交通控制的相關研究,以線性規劃方法為基礎,同時考慮進出口匝道排隊約束、主線通行能力約束以及行駛速度約束,提出了城市快速路流入交通的動態控制手法。鄭建湖等[2]對不同的匝道控制策略分類比較,分析了不同類別策略的優缺點及其適用范圍。鄭飛等[3]考慮城市快速路與高速公路之間的差異,基于ALINEA進行擴展,引入匝道交通狀態控制閾值和匝道排隊分段約束,提出一種入口匝道單點動態控制策略。
1.1.2 可變限速控制
可變限速(Variable Speed Limit, VSL)控制方法最初應用于高速公路,屬于一種主線控制的手段,通過改變道路限速值調節道路交通流狀態,使車輛速度盡量保持一致以便交通流能夠穩定運行,減少走走停停現象,提高道路安全性與道路吞吐量。
Alessandri等基于反饋控制提出一種改進的可變限速控制策略,利用仿真驗證該策略可以預防和減少擁堵的作用;Lin等提出兩種VSL算法,分別通過降低上游排隊長度來減少延誤,提高VSL控制區總吞吐量來減少總時間花費改善交通狀況。Juan等將高速公路擁堵劃分為需求驅動、供給驅動兩類,并利用計算機仿真驗證實施VSL對這兩類擁堵的改善情況;陳大山等[4]對METANET模型進行擴展,增加速度引導作為控制變量,建立快速路速度引導預測模型。
1.2 研究現狀評價
傳統匝道控制方法通過調節匝道控制律控制進入快速路主線的車輛數,容易導致匝道排隊溢出。可變限速控制技術能夠調節道路交通流運行狀態,但道路流量接近飽和時,可變限速控制的調節效果有限。匝道控制、可變限速控制在單獨實施的情況下效果有限,但前者能夠有效控制進入快速路的流量,而后者在一定限度內對交通流運行有良好的調節效果。協調匝道控制和可變限速控制能夠使兩者技術優勢,達到更好的控制效果,由此筆者提出將上述兩種控制方法結合的快速路協同控制模型。
2 快速路協同控制模型
2.1 工作機理
道路交通流密度較小時,不必對交通流進行管控也能維持良好運行;而當道路超負荷供給時,需要進行入口匝道控制,對進入快速路的流量進行限制,防止快速路交通狀況進一步惡化。可變限速控制基于感知路況變更路段限速值,使車流速度趨于一致,以保證路段交通流穩定運行。
本文構建了快速路控制系統,控制系統由路況感知系統、匝道控制系統以及可變限速控制系統組成。在快速路瓶頸路段上下游以及入口匝道處分別設置交通流檢測器;通過各組交通流檢測器判斷快速路瓶頸處交通狀況,根據道路交通擁堵情況實施控制措施,疏解擁堵,穩定交通流。VSL控制區上游設置可變信息板,發布道路限速提示以及智能匝道可用性信息,對駕駛員的交通行為進行引導。
2.2 模型建立
2.2.1 路段模型
由于METANET模型能夠較好描述復雜交通現象且在實踐中驗證了模型的魯棒性,本文采用該模型描述道路交通狀態。快速路網由有向圖表示,網絡的節點表示交叉口、道路幾何形狀發生明顯變化的位置以及匝道和匝道的延伸;有向弧表示快速路網中一段連續的、幾何形狀相似且無道路分岔或匯聚路段;每個路段等分長度為、車道數為的個子段,子段的交通狀態由路段密度、交通流量以及平均速度表征,相關參數的計算如下:
(1)
(2)
——時段路段子區段的交通密度;
——時段路段子區段的平均速度;
——時段路段子區段的流量;
——時段路段的穩態速度;
——離散時間步長,通常取10 s。
2.2.2 起點模型
起始節點接收交通需求,流量由此進路快速道路,考慮快速路主線流量與入口匝道的不同性質,加入流量約束進行建模。起點路段可表示為路段的第1個子段。
(3)
式中,——時段起始節點處的流入流量;
——時段起始節點處的交通需求;
——時段路段第1個子區段速度決定的最大流入流量(veh/h)。
進行協同控制時,應當充分考慮駕駛員對于動態限速信息的接收與執行過程。當變更后限速值與路段當前交通流速度差距過大時,將導致路段車輛之間速度差進一步加大,引發交通安全事故。
因此,模型的目標函數由成本項與懲罰項這兩部分組成。成本項是道路網絡中車輛的總旅行時間TTT;懲罰項的作用是抑制可變限速信號發生突變,使控制信號盡量平滑,防止產生沖擊波使交通狀況惡化,保障快速路段的交通安全。目標函數中成本項與懲罰項的重要性由各項的相對權重表示。
(4)
式中,——恒定參數;
——路段的可變限速值與路段自由流速度之比。
2.3 優化結果
根據前述模型優化結果,進行仿真分析。本文選取成都市三環快速路進行研究。對交通流數據進行處理后所得結果如下表所示。
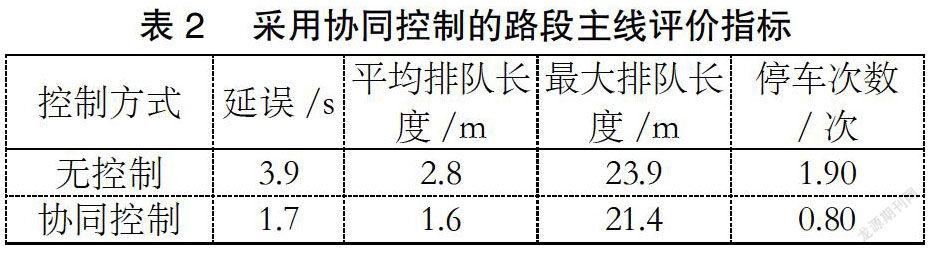
利用VISSIM對高峰時段道路交通狀況進行3 600秒仿真后得到的相關評價指標,如表2所示。
3 結論
對比實施協同控制前后的行程時間與流量情況,采取協同控制后快速路主線行程時間明顯縮短,但輔路行程時間有所增加;但主線流量、輔路流量均減少。從仿真評價結果中可以看出,采取協同控制后,快速路段主線的延誤、停車次數、平均排隊長度均有明顯下降;最大排隊長度有所減少。
究其原因,采取協同控制后,由于匝道控制的限制,進入快速路主線的流量減少,協同實施可變限速后促進快速路主線車輛實現車速均質化,進一步改善了路段交通流狀態,因此主線行程時間、延誤、停車次數、排隊長度等指標均有明顯下降。另一方面,限制進入主線的流量對快速路輔路造成了更多的交通壓力,使輔路擁堵程度上升,導致輔路行程時間增加,流量有所減少。
綜合來看,協同控制策略對快速路主線交通流優化效果較好。不足之處在于實施匝道控制容易導致匝道排隊溢出而影響輔路的通行能力,未能充分考慮對于輔路用戶的公平性及其滿意度,未來將進一步研究。
參考文獻:
[1]楊曉光.考慮進出口匝道排隊約束的城市快速道路交通系統動態控制方法[J].西安公路交通大學學報,1999(2):22-28.
[2]鄭建湖,董德存,陳洪.城市快速路入口匝道控制策略比較分析[J].計算機測量與控制,2006(2):196-199.
[3]鄭飛.杜豫川,孫立軍.基于ALINEA算法快速路入口匝道單點動態控制[J].同濟大學學報(自然科學版),2009(6):766-771.
[4]陳大山,孫劍,李克平.城市快速路速度引導預測控制模型[J].交通運輸工程學報,2012(1):102.