仿生機器魚近壁面流場識別的人工側線方法
2021-09-16 07:04:34宋愛國孫兆光沈曄湖
哈爾濱工業大學學報 2021年9期
關鍵詞:模型
謝 鷗,宋愛國,苗 靜,孫兆光,沈曄湖
(1.東南大學 儀器科學與工程學院,南京 210096;2.蘇州科技大學 機械工程學院, 江蘇 蘇州 215009)
隨著人類對海洋開發的深入,面臨的水下作業環境也愈發險惡。自主水下機器人(autonomous underwater vehicle, AUV)作為海洋探測的重要工具,對其性能也提出了更高的要求。傳統的水下機器人因采用螺旋槳推進而存在效率低、噪聲大、機動性差等缺陷,已無法適應日益發展的水下作業要求。近年來,受魚類優越的游動性能啟發,科研人員對魚類的游動機理進行了深入的研究,模仿并研發了各類高性能的仿生機器魚[1]。作為自主水下作業裝備,仿生機器魚需要對周圍流場環境進行有效地感知和識別。然而,受水質渾濁度和復雜非結構的水下地形環境影響,傳統的光學成像和聲吶探測技術應用受到限制,嚴重制約了仿生水下機器人的作業能力。
側線系統是魚類長期適應水下環境進化出來的一類特有感覺系統,它使魚類能夠在漆黑、渾濁的水下環境中通過感知水流、水壓和微弱電場的動態變化進而有效識別環境中的障礙物,造就了魚類趨流、集群、捕食、避障等眾多奇妙行為[2]。魚類側線系統神奇的環境感知能力引起了研究人員的廣泛關注,國內外學者主要從側線感知機理、仿生人工側線(artificial lateral line, ALL)和信號處理等3個方面對其展開了研究。Hofer最早進行了側線功能的研究[3], 并推測側線在感受水體刺激的過程中發揮了感受器的功能。文獻[4]通過微觀分析和行為實驗研究了兩類洞穴魚的側線系統結構及工作機理。受側線感知系統啟發,研究人員構建了形式多樣的ALL系統,其結構主要分為兩類,一類是基于微機電系統(MEMS)技術開發的人工纖毛傳感器[5],另一類是利用壓力傳感器陣列來實現流場感知功能[6]。此外,研究人員還提出了多種數據處理算法,對獲取的流場壓力信息進行融合處理[7-8]。
綜合現有文獻研究可知,ALL在流場流速檢測和運動物體位置識別等方面獲得了較好的應用。ALL陣列被安裝在剛性的載體上,通過采集周圍流場的壓力變化信息實現對來流速度或運動物體位置的預測[9-10]。然而在基于仿生機器魚的水下作業中,如:海底石油管道漏油檢測、海底地形地貌測繪、水下橋墩或大壩健康狀態監測等,ALL需要安裝在柔性波動的機器魚體表面且同時需要對流場速度和靠近作業對象壁面的距離進行檢測,以便調整自身游動模式實現高效穩定地對目標近距離作業。本文通過研究仿鲹科機器魚近壁面游動的體表壓力變化特性,提出了一種基于ALL和多層前饋神經網絡的近壁面流場識別方法,實現了仿生機器魚近壁面游動的來流速度和靠壁距離預測,為水下復雜非結構環境感知提供了一種新思路。
1 理論分析
魚類側線系統包含表面神經丘和側線管神經丘,分別用于感知流體的速度和加速度(與壓力相關)信號,并將該時空動態變異的微小信息傳導至中樞神經,提供給魚體即時的位向和環境水動態信息,助其調整身體的行為模式,達到適應環境的目的。考慮不可壓縮、等溫的牛頓流體(密度ρ,黏度μ),Navier-Stokes(N-S)方程可表示為
(1)
由上式可知,壓力-?P和動量?2V之間存在函數關聯,速度減少會導致壓力值的上升,因此通過分析魚體體表壓力值的變化可對來流速度進行估計。此外,魚體主動對稱波動變形和受流體作用下的被動運動會導致周圍流場的周期性變化,進而影響魚體體表壓力分布。作用于單位長度魚體的側向力R可表示為
(2)
其中:m(x)為單位長度魚體的虛質量,w(x,t)為魚體相對于流體的側向運動速度。
靠近壁面波動時,魚體推動流體流向側壁時,流體因受到側壁面的阻擋,速度下降,從而導致w(x,t)的值上升,側向力R增大。因此,通過檢測魚體兩側對稱位置的體表壓力差值可對靠壁距離進行預測估計。
2 數據采集及處理
2.1 仿真建模
仿真計算模型如圖1所示,左側為流場入口邊界,來流速度為v,右側為壓力出口邊界,上/下邊界和魚體表面定義為無滑壁面邊界。采用基于非結構化網格的非定常N-S求解器對流場進行仿真,其中N-S方程見式(1)。時間離散采用一階隱格式,黏性項采用標準態離散,壓力-速度耦合項用SIMPLE方式,而對流項則用二階迎風格式離散。通過編寫UDF程序控制機器魚進行波動運動,采用彈簧光順和局部重構的動網格技術對網格進行更新。
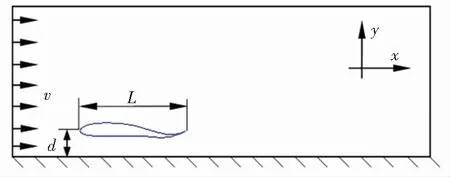
圖1 仿真模型
利用長度為L的二維Joukowski翼型模擬機器魚在距離側壁面為d的位置做波動運動,采用的鲹科波動方程[11]表示為
(3)
為了采集流場壓力變化信息,如圖2所示,在仿生機器魚體表配置了一系列虛擬壓力傳感器,構建流場識別ALL系統用于提取仿生機器魚波動推進過程中的實時體表壓力數據。其中頭部壓力傳感器記為S1,沿體長方向均勻對稱分布的壓力傳感器組記為Si?{SiL,SiR},2≤i≤11,SiL為身體左側壓力傳感器,SiR為身體右側壓力傳感器。
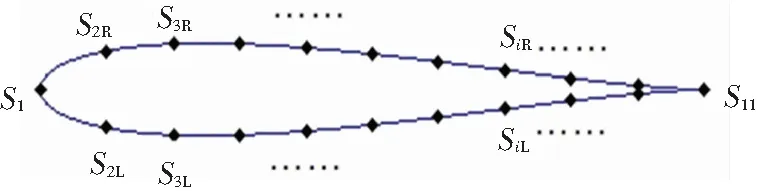
圖2 ALL傳感器布局
考慮來流速度v、靠壁距離d以及波動頻率f對仿生機器魚體表壓力的影響,本文進行了一系列的參數化仿真實驗。仿真實驗中設置來流速度為0~1.0 m/s、靠壁距離為0.1L~2L、波動頻率為0.5~2.5 Hz、ALL采樣頻率為0.5~2.5 kHz,開展了277次仿真實驗。其中d=2L表示無壁面效應狀態。ti時刻,頭部壓力傳感器S1采集的壓力數據記為P(s1,ti),壓力傳感器組Si采集的壓力數據表示為P(Si,ti)?{PL(SiL,ti),PR(SiR,ti)}。則在測試周期T內采集的整體壓力數據可表示為
(4)
為了消除魚體自身波動運動對側向壓力分量的影響,對頭部壓力傳感器S1采集的壓力數據在運動周期T內取均值,同時對傳感器組Si采集的壓力數據求和并取均值,可得
(5)
進一步,對各壓力傳感器采集的壓力數據進行無量綱化處理,可得到歸一化壓力系數表示為
(6)
其中U=λf。
2.2 仿真結果分析
圖3為仿生機器魚近壁面游動(d=0.2L)時,不同時刻的流場結構分布云圖。由圖3(a)壓力場云圖可知,在整個運動周期內,魚體和壁面之間始終存在一個低壓區。受壁面效應的影響,魚體對稱波動形成的壓力場呈現出非對稱分布。同理,如圖3(b)所示的速度場云圖,由于壁面效應的存在,魚體和壁面之間始終出現一個高速區且速度場也呈現出非對稱分布。壓力場和速度場的非對稱分布為近壁面環境的識別提供了依據。
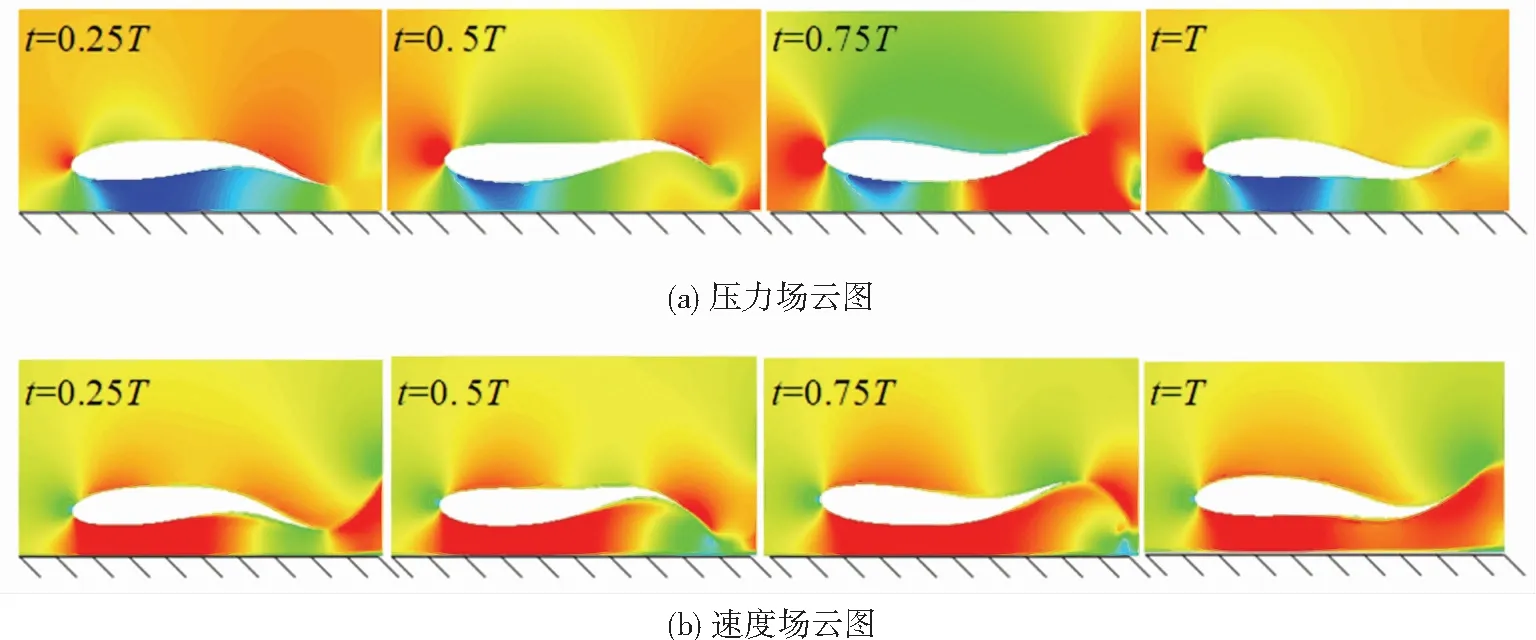
圖3 流場分布云圖
對頭部傳感器S1和傳感器組Si(i=2,…,11)在不同靠壁距離d和來流速度v下采集并處理得到的壓力系數求方差,可得到如圖4所示的壓力系數方差曲線。由圖4(a)可知,在給定的來流速度v=0.2~1.0 m/s,頭部傳感器S1在不同靠壁距離下采集的壓力系數方差值隨來流速度增大而增大,沿著體長方向中部的傳感器組S2,…,S6采集的壓力系數方差值保持較低的水平,尾部傳感器組S7,…,S11采集的壓力系數方差值呈上升趨勢變化。由圖4(b)可知,在給定的靠壁距離d=0.2L~0.8L內,傳感器陣列在不同來流速度下采集的壓力系數方差值沿體長方向的變化趨勢與圖4(a)保持一致。數據樣本方差體現了數據的離散程度,利用傳感器采集的壓力系數方差值可衡量傳感器對流場參數的辨識度,方差值越大表示該傳感器組對流場參數變化越敏感,傳感器組在整個陣列中的信息權值也越大。由此可根據傳感器組采集的壓力數據方差值對傳感器的布局和數量進行優化。
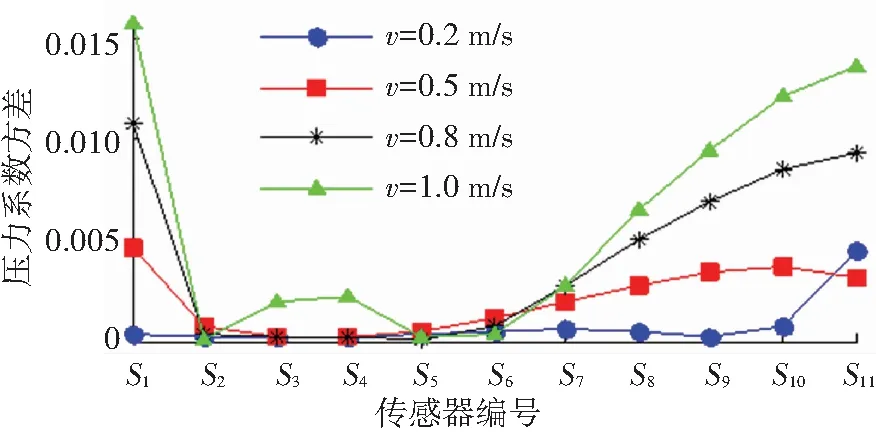
(a)來流速度不同
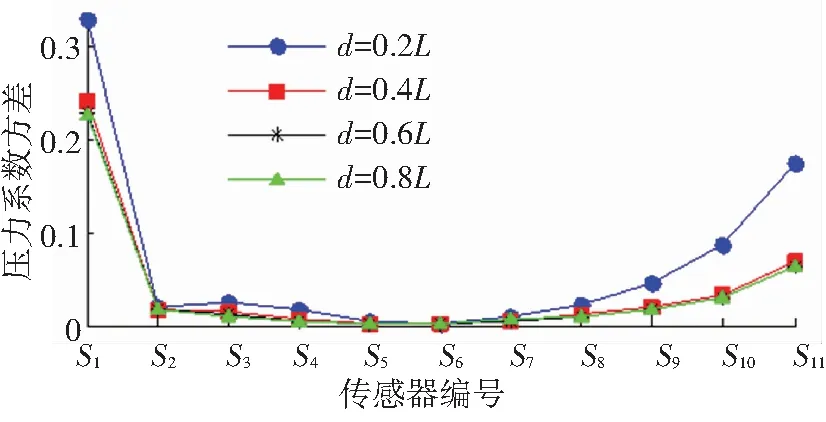
(b)靠壁距離不同
3 神經網絡建模
3.1 多層前饋神經網絡結構分析
利用仿真實驗采集的壓力數據,訓練并建立基于多層前饋神經網絡的來流速度和靠壁距離預測回歸模型。多層前饋神經網絡的結構參數包括輸入數據特征數量、隱藏層數量、隱藏層神經元數量、隱藏層/輸出層激活函數的選擇。如表1所示,建立來流速度和靠壁距離兩個預測回歸模型,采用ReLU函數作為隱藏層激活函數,輸出層采用線性激活函數。 為了尋找優化的神經網絡結構,將隱藏層層數從1逐步遞增到5,第1隱藏層的神經元數量從輸入特征數量逐步遞增到3倍,每次步進為1。各隱藏層神經元數量呈遞減規律配置,后一層神經元數量是前一層的2/3。
采用均方誤差(mean-square error, MSE)和決定系數R2對不同配置的網絡結構進行性能評估:
(7)
來流速度預測回歸模型取不同結構參數時的評價指標,如圖5所示。隱藏層數量和隱藏層神經元數量決定了神經網絡的容量,網絡容量越大,時間復雜度越大且越容易過擬合,因此在保證模型性能指標的情況下應盡量減小網絡容量。由圖5可知,在給定的結構參數范圍內,隱藏層數量和隱藏層神經元數量對R2和MSE的影響都很小,為減小網絡容量首先可確定采用1個隱藏層。進一步由圖5(b)可知,采用1個隱藏層且隱藏層神經元為36時,MSE的取值最小。因此綜合考慮模型性能指標和網絡容量,可確定最優的來流速度神經網絡預測回歸模型的結構為12-36-1。

表1 多層前饋神經網絡結構參數
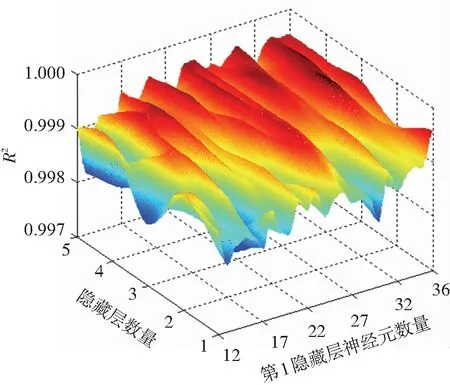
(a) R2
(b) MSE
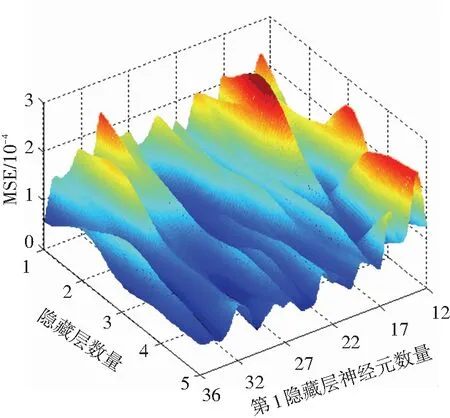
靠壁距離預測回歸模型取不同結構參數的評價指標,如圖6所示,由圖6可知,在給定的參數范圍內,隨隱藏層數量增多,R2首先呈增大趨勢變化而MSE呈下降趨勢變化,當隱藏層數量大于等于4時,R2和MSE基本都保持不變,為保證模型性能指標,可確定隱藏層數量的取值為4。此外,隱藏層神經元數量對R2和MSE的影響都很小,為減小網絡容量,第1隱藏層神經元數量應取最小值13。綜上所述,可獲得最優的靠壁距離預測回歸模型的結構為13-13-8-5-3-1。
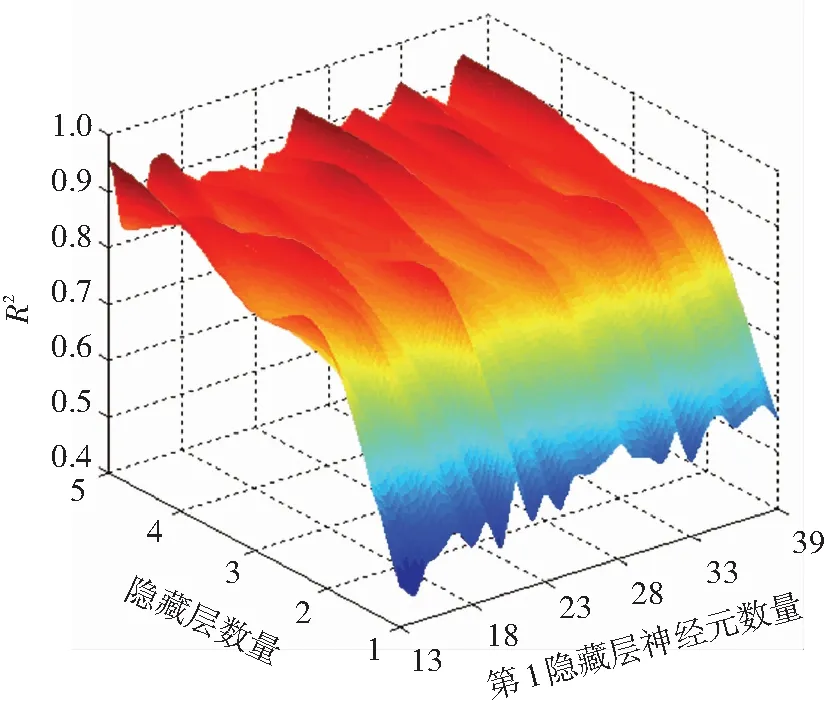
(a)R2
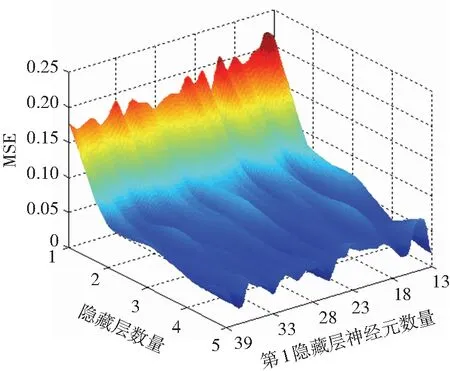
(b)MSE
3.2 數據特征縮減
依據2.2節對人工側線采集的壓力系數方差值的分析結果,采用特征變量逐步消除法對輸入數據特征進行縮減。如表3所示,對壓力傳感器采集的壓力系數方差值按照從小到大的順序逐步消除對應的輸入數據特征。
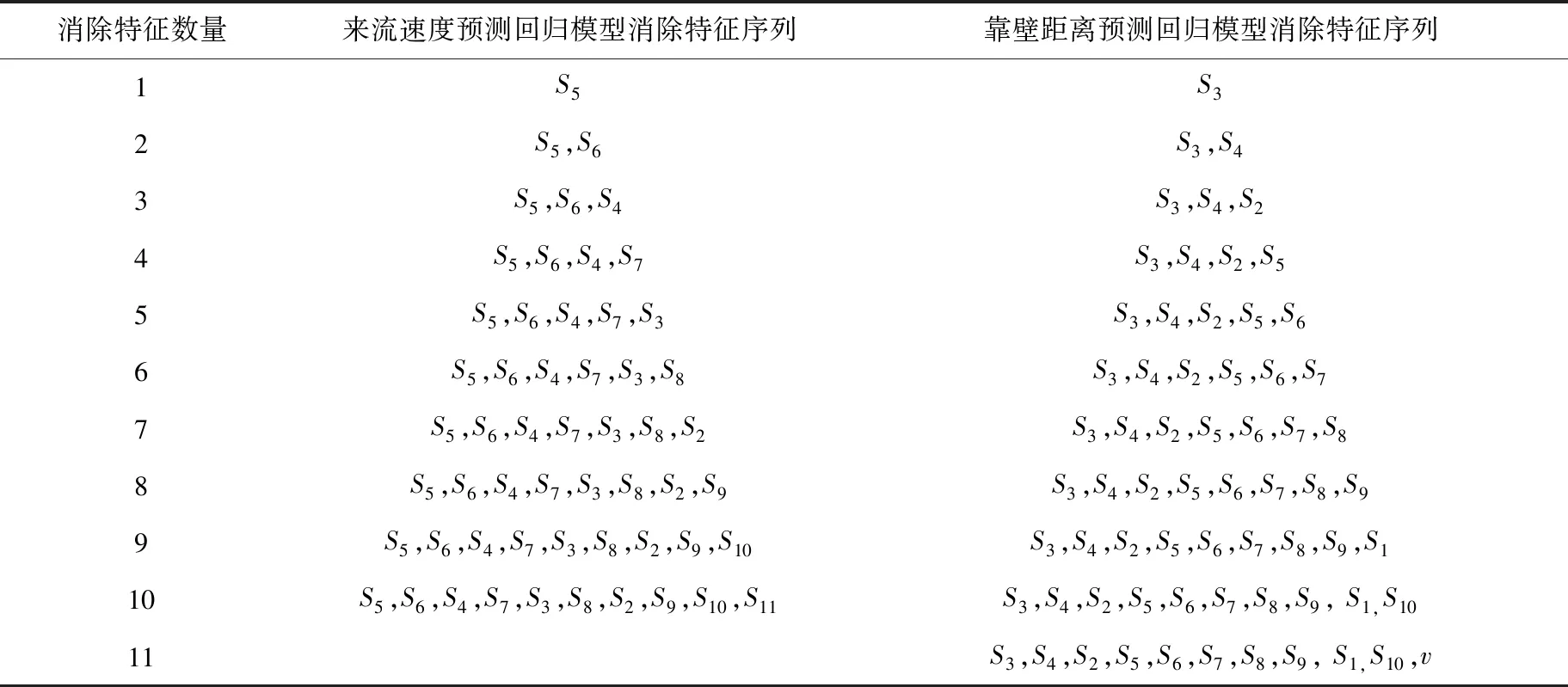
表3 數據特征消除順序列表
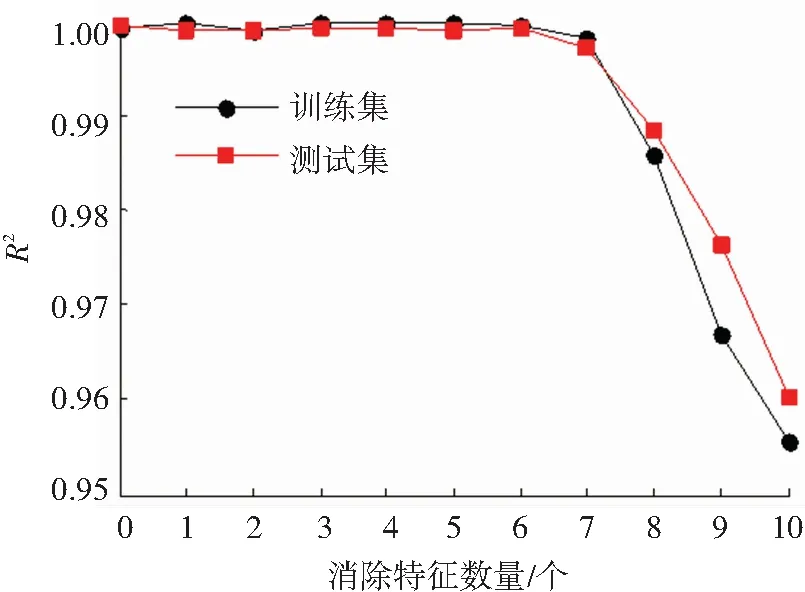
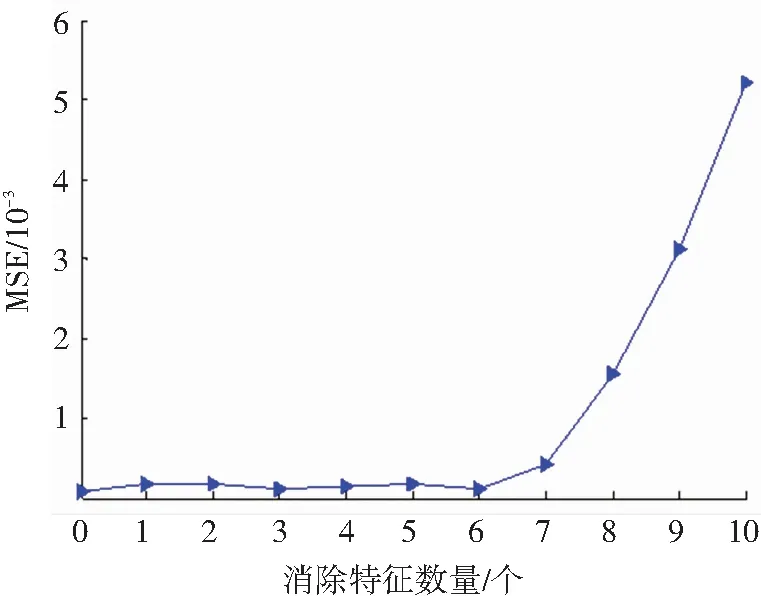
圖7為來流速度預測回歸模型中數據特征消除數量對評價指標的影響關系曲線。由圖7(a)可知,當消除數據特征數量小于等于6個時,在訓練集和測試集上的R2基本保持平穩,隨著消除數據特征數量的進一步增大,R2呈快速下降趨勢變化。對于MSE由圖7(b)同樣可以看出,當消除數據特征數量小于等于6個時變化很小,而大于6個時呈快速增長趨勢變化。由此可知,數據特征序列{S5,S6,S4,S7,S3,S8}對來流速度預測回歸模型的預測效果影響很小,特征消除后的優化特征集為{S1,S2,S9,S10,S11,f}。
圖8為靠壁距離預測回歸模型數據特征消除數量對評價指標的影響關系。由圖8(a)可知,當消除數據特征數量小于等于5個時,在訓練集和測試集上的R2變化很小,而當消除數據特征數量大于5個時,在訓練集和測試集上的R2呈快速下降趨勢變化。同理,由圖8(b)可知,當消除數據特征數量大于5個時,在測試集上的MSE呈快速上升趨勢變化。由此可知,數據特征序列{S3,S4,S2,S5,S6}對靠壁距離預測回歸模型的預測效果影響甚微,應予以消除,最終可獲得優化的模型輸入數據特征集為{S7,S8,S9,S1,S10,S11,f,v}。
(a) R2
(b) MSE

(a) R2
圖9、10分別為來流速度和靠壁距離預測回歸模型在數據特征消除前后的預測效果對比。由圖9可知,來流速度預測回歸模型對給定范圍內的來流速度預測效果很好(R2=0.998),消除6個數據特征后,預測效果基本保持不變(R2=0.994)。由圖10可知,靠壁距離預測回歸模型對靠近壁面時的狀態預測效果較好,而遠離壁面狀態(d=2L)的預測效果變差(R2=0.912)。消除5個弱相關的數據特征后,預測效果變化不大(R2=0.883)。
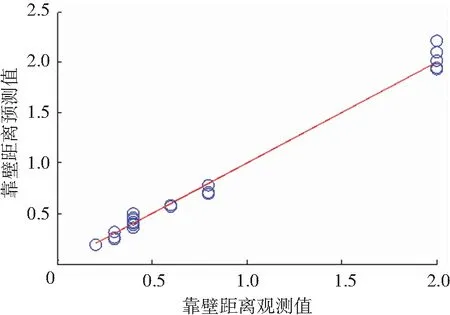
(a)無數據特征消除(R2=0.912)
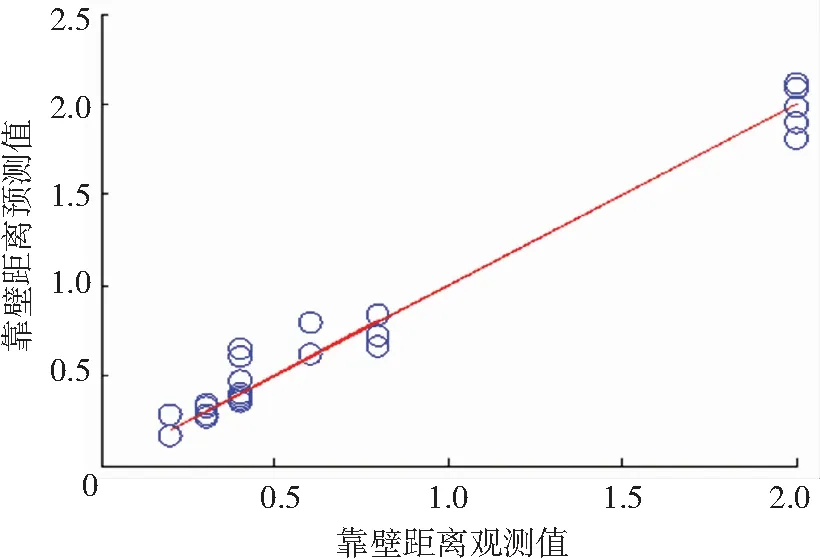
(b)消除5個數據特征(R2=0.883)
4 結 論
提出了一種基于人工側線的近壁面波動推進仿生機器魚流場識別方法,采用計算流體動力學方法開展了參數化仿真實驗,采集了不同流場狀況下仿生機器魚的體表壓力數據,訓練并建立了基于多層前饋神經網絡的流場參數預測回歸模型,并進行了模型結構優化和數據特征縮減。得出主要結論如下:
1)仿生機器魚近壁面波動推進將導致周圍流場結構的非對稱分布,為基于人工側線的流場參數識別提供了依據。
2)獲得了側線壓力傳感器陣列在不同來流速度和靠壁距離下的壓力系數方差值,揭示了不同位置壓力傳感器對流場參數變化的辨識度。
3)隱藏層數量和隱藏層神經元數量對來流速度預測回歸模型的評價指標影響很小,而靠壁距離預測回歸模型的隱藏層數量增多將導致R2增大,MSE減小。
4) 沿體長方向中部的壓力傳感器組對來流速度和靠壁距離的預測效果影響小,應予以消除,計算結果表明所提出的方法對來流速度和靠壁距離具有較好的預測效果。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19