輕型無人機航磁調查系統及在礦產勘查中的應用前景
2021-09-16 09:13:36張文杰楊生郭剛冀新臣楊申勇
礦產勘查 2021年4期
張文杰,楊生,郭剛,冀新臣,楊申勇
(有色金屬礦產地質調查中心,北京 100012)
0 引言
中高山、地貌復雜地區的礦產勘查難度大、工作程度低,然而也是我國金屬礦產的重要勘查接替區(周道卿等,2013),為了研究一種快速有效的找礦勘查手段,有色金屬礦產地質調查中心在自研發傳統動力三角翼航磁系統基礎上(王慶乙等,2010),進一步研發集成了以多旋翼和垂起固定翼無人機為飛行平臺的輕型無人機航磁調查系統。該系統主要針對中高山、地貌叢林發育等人力極難開展工作的復雜地區,采用沿地形起伏仿地飛行測量方式,獲取高分辨率、高質量的航磁數據,實現大比例尺高精度低空航磁精細測量,最重要的是不會因超低空飛行事故造成人員傷亡(熊盛青,2007)。本文通過在云南個舊和河南嵩縣廟嶺的典型高山、地貌發育特征的地區進行了輕型無人機航磁調查實踐,獲取了豐富的高精度航磁數據信息,為礦山深部及外圍找礦預測提供了可靠依據。
1 無人機航磁系統現狀
1.1 國外現狀
(1)固定翼無人機航磁系統
無人機航磁系統的發展主要受制于無人機和航磁磁力儀的發展進度,目前國際上主流固定翼無人機航磁技術主要是荷蘭的Fugro公司的Georanger無人機航磁系統、英國Magsurvey公司的PrionUAV無人機以及加拿大萬能翼地球物理公司的Venturer無人機(崔志強等,2019)。以上均屬于彈射式中大型固定翼無人機,搭載重量較大的光泵磁力儀,優點是單架次全自主飛行續航時間長(1~20 h不等),光泵磁力儀精度質量高;缺點是設備機動性相對差、對飛機起降環境要求高、沿地形起伏飛行能力差、飛行高度高以及成本費用高等。
(2)多旋翼無人機航磁系統
多旋翼無人機對比固定翼無人機可以懸停變高隨地形起伏飛行,具備完全的超低空飛行測量能力。當前主要是德國MGTUAS無人機航磁系統(吳珊等,2017),搭載航空三軸磁通門進行飛行測量,主要應用于未爆彈檢測、管道跟蹤等淺部埋藏物。磁通門受姿態變化影響較大,在無人機起伏變高飛行時,儀器記錄數據誤差較大且無法完全補償校正,因此不適應于高山復雜地區的變高飛行測量。
1.2 國內現狀
國內的無人機航空物探研究雖起步較晚,但進步很快。先后有中船重工第七一五研究所、中科院遙感所、自然資源部航遙中心、地科院物化探所等單位開展了基于固定翼或直升機的無人機航磁測量技術的研究工作(崔志強等,2015)。
2008年,中船重工715所最早開始了基于大載荷無人直升機平臺的航磁系統研究,采用的是V750無人直升機,搭載氦光泵磁力儀(GB-10),隨后,中科院遙感所采用自行研發的航模型固定翼無人機搭載氦光泵磁力儀在內蒙古進行了系統應用測試。2011年自然資源航遙中心采用ASN-216多用途無人駕駛飛機搭載氦光泵磁力儀進行了航磁測量的系統研制和試驗,該航磁系統為高空無人機航磁探測系統。2011年,國家深部探測技術與實驗研究專項子項目固定翼無人機航磁勘探系統(SinoProbe-09-03)研制成功(黃大年等,2012)。2013年,地科院物化探所基于國產彩虹3長航時固定翼無人機平臺,搭載CS-VL銫光泵磁力儀及航空伽瑪能譜儀(李軍峰等,2014),在多寶山礦區實施了無人機綜合測量應用試驗。受制于固定翼無人機的飛行性能特點,航磁作業不能進行超低空沿地形起伏飛行測量,僅適用于大面積、地勢平坦區域的航磁調查;旋翼無人機可沿地形起伏飛行,但大載荷無人機的可靠穩定性以及磁干擾補償方面還有待發展提高。
依托自有動力滑翔機航磁系統的基礎優勢(王慶乙等,2010;楊生等,2017),有色金屬礦產地質調查中心從2016年開始啟動無人機航磁系統的研發及應用試驗,力求避免有人機的人員傷亡危險,真正實現超低空沿地形起伏飛行、高效便捷的高分辨率航磁測量系統。在中國地質調查局發展研究中心的大力支持下,將研發試驗成功的多旋翼無人機航磁和垂起固定翼無人機航磁應用到礦產地質調查項目,并取得較好效果,航磁系統見圖1。

圖1 多旋翼航磁(a)與垂起固定翼航磁(b)系統
2 輕型無人機航磁系統
2.1 多旋翼無人機航磁系統
2.1.1 系統組成
多旋翼無人機航磁系統由大疆M600Pro六軸多旋翼無人機和鉀光泵磁力儀組成。
M600Pro六軸多旋翼無人機最大起飛重量15.5 kg,最大載荷5.5 kg,無需跑道或專用場地便可以垂直起降,飛行速度一般在0~50 km/h,具有強大的飛行靈活性,可適用于地形比較復雜的中高山區沿地形起伏飛行,如果地形數據準確且無地面人工設施干擾,多旋翼無人機航磁可沿地形5~30 m高度進行高分辨率航磁測量,甚至可以替代地面高精度磁測。
系統搭載高精度銣光泵磁力儀,分辨率達0.0001 nT,采樣率1~10/s,地面靜態噪聲水平約0.01 nT。整套平臺系統以6~10 m/s速度飛行,續航約15~20 min。
2.1.2 系統磁干擾測試
磁力儀和無人機通過硬連接探桿方式進行總裝集成,探頭安裝位置采用遠離無人機方式規避機體磁干擾(張龍偉等,2016),為此進行了無人機干擾異常測量試驗。選取一塊磁測平穩周圍無干擾的10 m×10 m的區域,以0.5 m為間隔進行網格化,首先測量沒有無人機的背景磁場強度,再將無人機放置中心位置,將測量探頭保持飛機同一高度測量飛機平面干擾異常,經日變改正后,無人機網格異常和背景場的差值為無人機的干擾平面異常,如圖2所示。

圖2 大疆M600Pro無人機的干擾磁異常平面圖
多旋翼機體干擾主要發散分布在半徑1 m范圍內,干擾幅值約60~70 nT,距離無人機中心3 m左右基本上規避了無人機的磁干擾,將銣光泵探頭安裝在距離中心4 m的位置,解決了干擾源問題;另外,在無人機往返飛行測量時,保持多旋翼探桿始終保持一個方向,這樣解決了多旋翼航磁的測量方向差問題。
無人機在飛行過程中電機高速轉動,為了分析飛行狀態下電機對探頭的磁干擾,進行了靜止啟動飛行的測量實驗(圖3)。

圖3 輕型多旋翼無人機的靜止和動態磁干擾曲線
由圖3可以看出,飛機由靜止到啟動前數據平穩,啟動瞬間由于飛機動作變化,探頭姿態變化造成近2 nT的異常擾動,待飛機平衡穩定后磁場數據恢復平穩,隨著飛機起飛,飛機平穩飛行后數據曲線圓潤平滑變化,動態噪聲約0.05 nT,該狀態的磁力儀工作質量滿足規范的一級質量要求。
2.1.3 系統試驗及對比效果
2018年開始,經過一系列性能測試和飛行試驗后,2019年初,項目組在動力三角翼航磁示范區——遼寧青城子礦集區進行了多旋翼無人機航磁系統試驗,通過和已有滑翔機航磁測量結果的對比,評價系統性能。試驗成果見圖4。

圖4 多旋翼無人機在遼寧青城子礦區對比試驗(磁異常地質圖范圍一致)
試驗區面積5 km2,地形最大高差300 m,線距100 m。多旋翼無人機航磁系統測量結果和以往的航磁結果異常格局完全一致,磁異常和已知的二長花崗巖體分布位置吻合。但因以往航磁飛行離地高度約140 m,而無人機飛行離地高度約80 m且沿地形起伏飛行,所以無人機的航磁成果分辨率更高,對異常的刻畫更清晰,反映弱異常能力和異常幅度更強。典型對比剖面P15線的磁測曲線明顯反映了無人機航磁的細節分辨好于滑翔機,由于飛行高度更低,將滑翔機的一個低緩異常分解為兩個磁異常,且幅值更強。
本次對比試驗搭載的鉀光泵磁力儀整套系統裝置的重量最終精簡到4 kg,多旋翼無人機飛行續航控制在15至20分鐘內,地形起伏情況下單架次控制測線往返共4 km,測量效率一般;另一方面,高精度鉀光泵航空磁力儀較傳統氦光泵及銫光泵的測量精度更高,價格成本較高,如果無人機摔機的情況下造成幾十萬甚至上百萬的風險損失很大。因此,項目組尋求一種質量更小、綜合成本更低的磁力儀,經過系列的實驗測試,三軸磁通門測量數據未能滿足航磁規范技術要求。最終,經過實驗測試,選用體積質量更小的微型銣光泵磁力儀,地面靜態噪聲水平約0.01 nT,空中動態噪聲水平小于0.08 nT,分辨率達0.0001 nT,航磁設備不含連接線大約600 g,整體系統裝置累計不超過1.5 kg。
因以往航磁飛行離地高度約140 m,而無人機飛行離地高度約70 m且沿地形起伏飛行,所以多旋翼無人機的航磁異常分辨率更高,對局部異常的刻畫更清晰,反映弱異常能力和異常幅度更強,以往航磁異常幅值-80~200 nT,無人機航磁為-160~340 nT,如圖5所示(圖中a、b磁異常同一色階)。

圖5 輕型多旋翼無人機航磁系統在河南廟嶺地區試驗對比
2.2 垂起固定翼無人機航磁系統
固定翼無人機主要適用于大面積更安全更高效的快速航磁測量。受制于多旋翼的續航時間及飛行速度,多旋翼航磁主要適用于小面積的高山復雜地區大比例尺高分辨率的精細航磁調查;為了避免三角翼航磁的人員安全風險,針對大面積大比例中高山地區,開發集成了垂起固定翼無人機航磁。采取和多旋翼一樣的測量方式獲取了垂起固定翼無人機(縱橫大鵬007)的磁干擾場,由圖6看出,大鵬垂起無人機的磁干擾主要集中在后推槳發動機和機翼舵機部分,磁干擾達-300~300 nT。

圖6 輕型垂起固定翼無人機的磁干擾平面圖
將探頭盡量遠離機體,安裝在機頭支架1.2 m處,但仍然有2 nT左右的磁干擾,另一方面,固定翼無人機無法像多旋翼一樣避免航磁轉向差,所以采用三軸磁通門軟補償方式進行光泵磁力儀補償。無人機的機動動作補償是固定翼航磁系統發展的重點難點,項目組和相關單位合作,根據固定翼的特點將機動補償集成了到無人機的飛行控制程序。在一個平穩磁場區上方800 m高空,按照四邊俯仰、滾轉、偏航動作計算出磁補償參數,補償后標準差為±0.05 nT。
為了對該系統進行應用試驗與評價,在內蒙古克什克騰北部礦集區以往航磁測區進行飛行對比實驗。測量面積24 km2,線距100 m,試驗區溝谷發育,高差達200 m;無人機平均飛行離地高度約110 m,以往航磁平均為145 m,如圖7所示。

圖7 輕型垂起固定翼無人機航磁系統在內蒙古的測量對比試驗
最終的無人機航磁異常與以往航磁成果基本吻合,由于無人機設計航線為沿地形起伏,而以往航磁飛行離地高度不均勻離散程度高,無人機的航磁異常細節更豐富、分辨率更高。
為了分析固定翼無人機在飛行狀態下電機等機體對磁探頭的磁干擾,研究了靜止啟動飛行的測量實驗,由圖8可以看出,飛機起飛前數據平穩,飛機啟動后以最大轉速運轉垂起電機和后推電機,疊加環境磁干擾僅40 nT,垂直升空后進入平飛狀態,此時航磁數據曲線平滑圓潤,動態噪聲在0.06 nT以內。本套輕型垂起固定翼無人機基本可以在低山區做到沿地形起伏飛行測量,飛高控制在100 m左右。
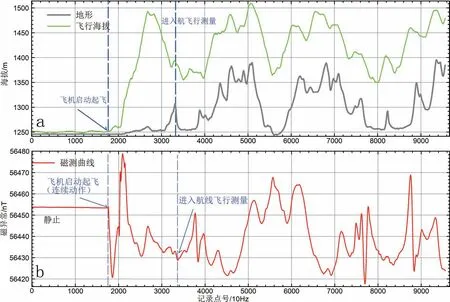
圖8 輕型垂起固定翼無人機的靜止動態磁干擾曲線
3 輕型無人機航磁應用前景
3.1 應用案例
3.1.1 工作區概況
“云南個舊錫礦礦集區礦產地質調查”為地質調查局發展研究中心的找礦勘查預測項目,目的是探尋隱伏巖體。工作區地形陡峭,切割較深,植被發育,最大高差600 m,地面人力、物探工作極難開展,傳統航磁方法無法在測區完成低空沿地形起伏飛行測量。區內大部分巖漿巖均隱伏于地下,地表以灰巖、泥質巖、白云巖以及千枚巖等弱磁性巖石地層為主,區內強磁巖性(礦物)主要有夕卡巖、部分花崗巖、玄武巖以及磁黃鐵礦(曾茜等,2016)。
3.1.2 測量方法技術
工作區地形復雜、切割大,采用多旋翼無人機航磁系統沿地形起伏飛行測量。根據高精度10 m誤差的衛星地形數據,設計仿地飛行航線和野外工作現場如圖9所示,線距100 m,無人機飛行速度8 m/s,采樣率5 Hz,平均點距不到2 m,平均飛行離地高度115 m,重復線總均方誤差計算航磁總精度為3.2 nT。每個架次可飛行有效測線6 km,即往返兩條3 km的測線,為節約電池續航,車載無人機轉移到測線端點,每個移動起降站最多可控制8個架次,即48 km的測量長度。
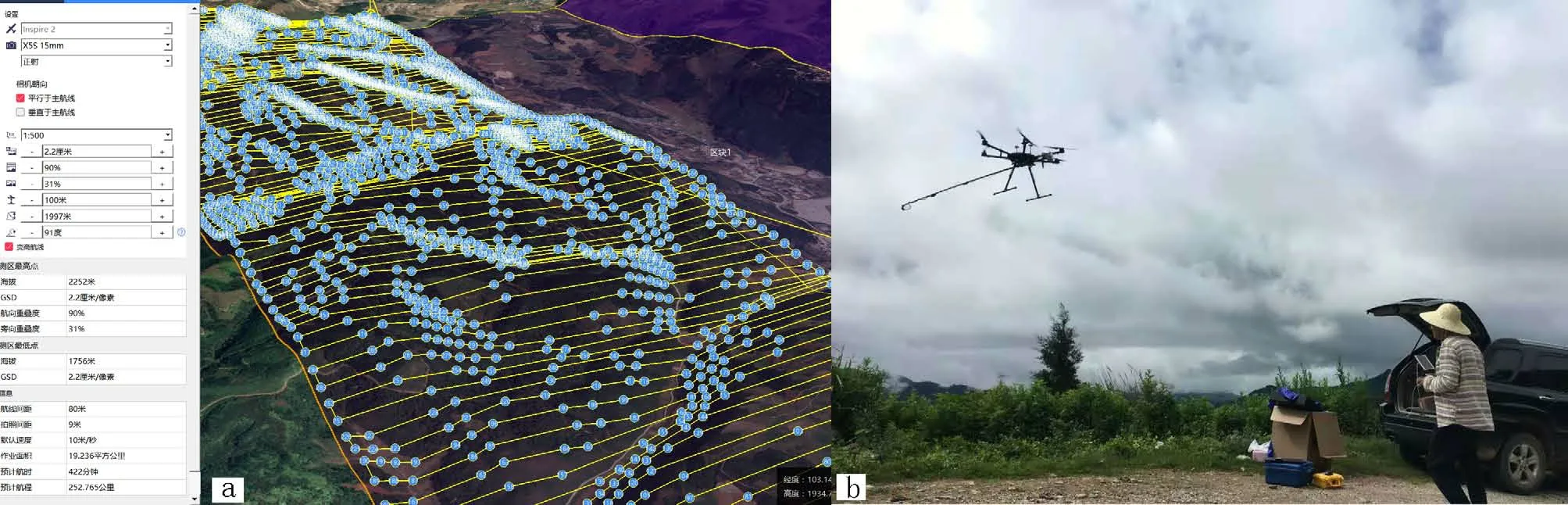
圖9 多旋翼無人機的航線規劃(a)與野外飛行工作照(b)
3.1.3 異常解釋和主要成果
圖10a是部分測區的航磁化極異常圖,圖10b為對應地質圖,測區中間第四系部分后期改造為尾礦庫,和航磁異常M7對應吻合;M6異常規模約3 km2,地表出露地層巖性為灰巖、灰質白云巖,均為無磁、微弱磁性物質,根據磁化率切片剖面(圖10c)、構造和重力特征推斷M6異常為隱伏變質玄武巖引起。該區銅錫多金屬礦和變質玄武巖關系密切,因此M6異常所揭示的隱伏變質玄武巖體是較好的找礦預測標志,也是本次無人機航磁測量的重要成果。
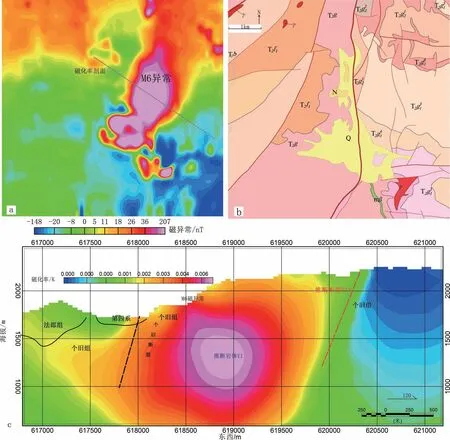
圖10 多旋翼無人機航磁在云南個舊地區的測量應用
3.2 應用前景
地表礦、淺部礦、易識別礦在逐漸減少,并且我國的鐵礦、多金屬礦區以及重點成礦靶區大多為地形復雜的中高山區,地面施工困難,礦區及外圍的地質和物探研究程度并不高。我國的航空物探勘查為20世紀70年代前后開展的固定翼航空磁測,定位精度較低,測量比例尺多為1∶20萬,少數為1∶5萬,且飛行高度較大,很可能遺漏許多有找礦意義的異常(熊盛青等,2008)。因此,開展高精度無人機航空物探測量十分必要。將輕型無人機航磁調查系統的主要適用概況為以下幾個方面:
(1)特殊景觀區、中高山地形起伏大的地區:地磁工作極難開展,利用超輕型光泵航磁設備充分發揮多旋翼無人機的飛行特點,沿地形超低空仿地飛行測量,獲取高分辨率航磁數據。
(2)多金屬重點找礦區的大比例尺快速勘查:在礦區外圍發現一系列中大型金屬礦床屢見不鮮,例如遼寧青城子鉛鋅礦、江西德興銅礦外圍。結合已知礦區的航磁異常特征,快速進行礦區外圍及有利地帶的延伸區域的航磁測量,對礦區潛在礦產資源進行評價。
(3)地表強干擾地區:在村莊、城市、電線等人文干擾較多的地區,地面儀器受強干擾不能正常工作,開展低空航磁測量,消除地表干擾異常,有利于提取深部或者盲礦體相關異常信息。
(4)設備輕巧、方便隨身攜帶,有利于設備進出口及海關出入,有利于推進“一帶一路”國家戰略的礦產資源調查評價。
本文主要研究的輕型無人機航磁調查,包括多旋翼無人機航磁系統和垂起固定翼無人機航磁系統,垂起固定翼主要針對大面積的中大比例尺的快速高效的航磁測量,然后針對重點靶區異常或者高山區,再進行超低空高分辨率的多旋翼航磁精細測量,兩種航磁系統結合應用,從而實現輕型無人機航磁調查的快速找礦突破。
4 結論
無人機作為一種經濟、高效、安全(無人員傷亡)的空中移動平臺,飛控平臺技術日趨成熟,在航空物探技術領域發揮的作用越來越大,航空物探設備也在向小型化、智能化方向發展。本文主要評述了有色地調中心輕型無人機航磁調查從研發到系統試驗的實踐過程,并且在項目勘查中取得很好的應用效果,主要總結如下:
(1)本文應用的多旋翼無人機航磁設備為高精度光泵磁力儀,符合航空磁測技術規范質量要求,有別于其他多旋翼航磁搭載的磁通門磁力儀;
(2)多旋翼無人機搭載超輕型光泵航磁系統可以采用嚴格的沿地形起伏飛行,真正實現了超低空高精度高分辨率航磁調查;
(3)垂起固定翼航磁系統改進了飛控操作系統,實現了自動機動姿態飛行補償,同時可進行緩地形起伏飛行測量;
(4)系統設備較以往航磁設備輕便很多、場地條件要求低、成本低、風險小、效率高,非常易于野外開展工作;
(5)垂起固定翼可完成大面積快速航磁普查,多旋翼進行超低空高分辨率異常檢查或重點區精細測量,兩套系統配合完成航磁調查,能實現快速找礦突破。
(6)我國中高山地區、重點礦區及外圍礦產資源潛力巨大,大比例尺、高分辨率、沿地形起伏的高精度航磁調查工作可提供可靠的找礦依據,輕型無人機航磁調查系統具有廣闊的應用前景和推廣價值。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
家庭影院技術(2017年9期)2017-09-26 03:41:45
