智慧感知技術在黃河口實體模型中的應用
2021-09-16 10:49:43陳俊王天奕徐奕蒙王磊郭澤斌丘瑾煒
科技資訊 2021年15期
陳俊 王天奕 徐奕蒙 王磊 郭澤斌 丘瑾煒


摘? 要:為了實驗人員更好地研究黃河,進而治理黃河,珠江水利科學研究院重建了黃河口實體模型,并將基于分布式泵群控制技術的海域潮汐自動化控制技術、PIV大范圍表面流場監測技術和來水來沙全自動控制技術等國內先進智慧感知技術、量測儀器、控制系統及試驗設施應用其中。這些技術為國家重點研發計劃項目“黃河口演變與流路穩定綜合治理研究(項目編號:2017YFC0405500)”提供了有力的科研技術支撐,也能更好地滿足其他大型潮汐物理模型控制和測量的應用需要。該模型基本能夠實現黃河口潮型、潮位和潮流的自動模擬相似,達到了預期設計的效果。
關鍵詞:黃河口? 實體模型? 潮汐控制? PIV? 來水來沙控制
中圖分類號:TP273 ? ? ? ? ? ? ? ? ? ? ?文獻標識碼:A文章編號:1672-3791(2021)05(c)-0069-05
Application of Intelligent Perception Technology in the Physical Model of the Yellow River Estuary
CHEN Jun? WANG Tianyi? XU Yimeng? WANG Lei? GUO Zebin? QIU Jinwei
(Pearl River Water Resources Research Institute, Guangzhou, Guangdong Province, 510611? China)
Abstract: In order for the experimenters to better study the Yellow River and to manage the Yellow River, the Pearl River Water Resources Research Institute reconstructed the physical model of the Yellow River Estuary. Incoming water and sand automatic control technology and other domestic advanced technologies, measuring instruments, control systems and test facilities are used in it. These technologies provide strong scientific research and technical support for the national key research and development project "Yellow River Estuary Evolution and Flow Stability Comprehensive Treatment Research (Project Number: 2017YFC0405500)", and can better meet other large-scale tidal physical model control and measurement applications need. This model can basically realize the similarity of the automatic simulation of the tide pattern, tide level and tidal current of the Yellow River Estuary, achieving the expected design effect.
Key Words: Yellow River Estuary; Entity model; Tide control; PIV; Incoming water and sediment control
黃河是世界上最難治理的河流,而河口的治理更是難點中的難點。黃河口演化環境的復雜性,使得黃河口沖淤演變較其他江河的河口具有特殊的規律,開展有關河口問題的研究,必須借助于物理模型試驗并結合實測資料及數學模型才可望得到有效解決[1]。因此,建設黃河口實體模型是認識黃河口演變基本規律、河口治理與決策科學性、地區經濟可持續發展及生態環境保護、河口洪情預測的要求,是“數字河口”完善和河口治理方案必不可少的中試環節,也是實現現代治黃和科技治黃的必然選擇,同時更是響應習近平總書記在黃河流域生態保護和高質量發展座談會上的講話“讓黃河成為造福人民的幸福河”的號召[2]。
1? 黃河口實體模型
黃河口實體模型位于黃河水利科學研究院模型黃河試驗基地的黃河口物理模型試驗大廳。2018年,珠江水利科學研究院根據黃河口模型平面圖(見圖1)對其進行了重建,重建后的黃河口實體模型見圖2。
該實體模型長44 m,寬20 m,可模擬原型范圍144 km2。其中模型的水平比尺λL=600,垂直比尺λH=60,流量比尺λQ=278 855,流速比尺λV=7.75,懸移質粒徑比尺λd=0.94,床沙粒徑比尺λD=2.87,水流運動時間比尺λt=77.46,含沙量比尺λS=1.75。
依托國家重點研發計劃項目“黃河口演變與流路穩定綜合治理研究(項目編號:2017YFC0405500)”,圍繞黃河口的演變及穩定流路,利用野外觀測數據、實體模型試驗和數值模擬及其混合模擬等手段,開展黃河口演變與流路穩定綜合治理研究。其中,黃河口實體模型實現的先進智慧感知技術有:海域潮汐自動化控制技術、PIV流場監測技術和來水來沙全自動控制技術。
2? 海域潮汐自動化控制技術
黃河口實體模型潮汐控制系統可實現潮流、潮位及泥沙等多因子同步耦合模擬,可滿足港口、河口海岸及近海工程中水流泥沙的基礎理論及應用等方面的研究需求,能進行海岸演變、港口碼頭修建和人工島等大尺度模型比尺下的完整實驗研究[3]。
黃河口實體模型潮汐控制系統分別由3個部分構成:生潮單元系統、潮汐量測儀器系統及整體軟件系統。
2.1 生潮單元系統
生潮單元系統采用分布式泵群控制技術,可按照給定的潮位過程曲線或者流量過程曲線實時控制模型潮位,并能根據模型各部位不同的流速、流向變化過程來控制模型的潮流過程,從而實現試驗場內潮流控制。
三面造潮,既可單獨使用,又可聯動運行,造潮采用頻率控制和泵群(包括電機)的方式實現,能滿足渾水試驗的要求。
2.1.1 生潮單元系統設計思路
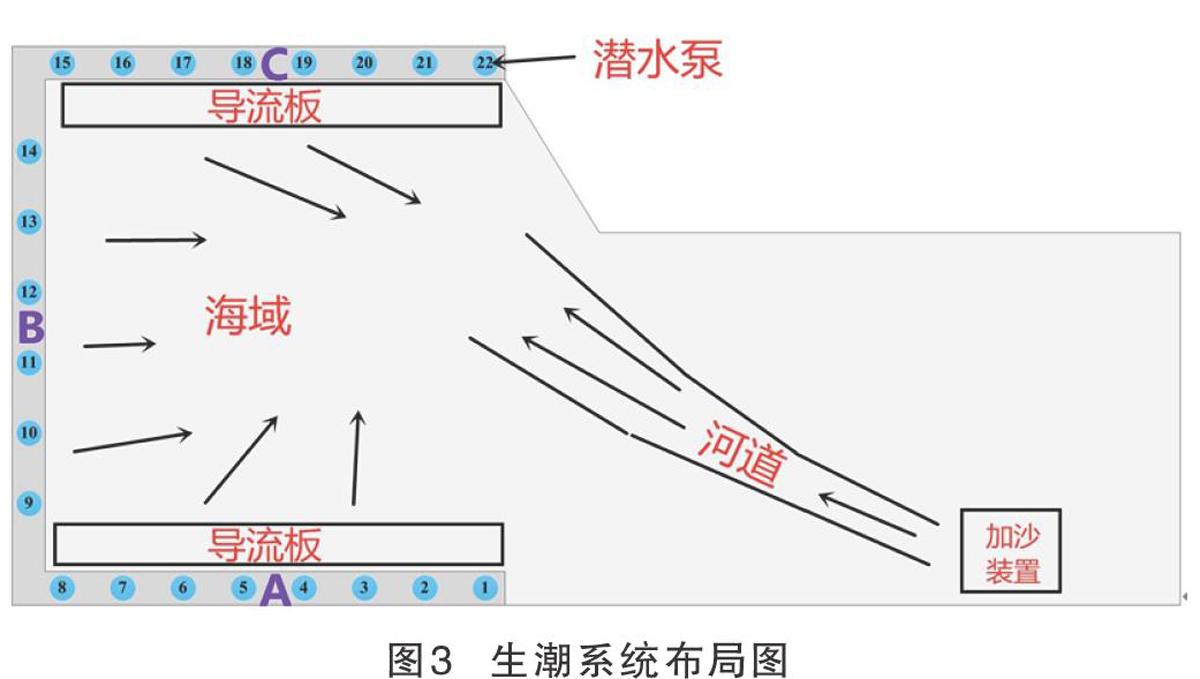
根據設計目標,黃河口實體試驗模型場地實現三面造潮(見圖3),即海區的三面均設為控制邊界,共部置22臺水泵,可靈活定義為下游邊界及左、右邊界。所有控制邊界均采用水位控制,布設水位儀測量水位,計算機根據控制算法結果,通過變頻器直接控制水泵的電機,通過調節加在電機上的交流電壓頻率來改變電機的運行速度,從而調節水泵的進出水流量,達到產生漲潮落潮的目的。
生潮單元的多邊界采用分布式泵群控制技術,通過潮汐專用測控軟件按照給定的潮位過程曲線或者流量過程曲線實時靈活控制下游邊界及左、右邊界的水流動力條件,并根據模型各部位不同的流速、流向變化過程來控制模型的潮流過程,可實現試驗場內潮流控制。
2.1.2 生潮單元系統系統構成
潮汐模擬單元采用TCP/IP協議的分布式工業控制技術,由中央控制主機、變頻器、雙向潛水泵、水位儀、流速儀和工業以太網等組成,如圖5所示[5]。中心監控計算機布置在控制中心,主要用于實時過程控制、數據采集、數據分析及存儲、人機對話、報警、實時過程圖表及曲線顯示、打印輸出等。
由于該生潮單元設計方案采用分布式泵群控制技術,可以尋址單獨控制每一臺潛水泵,因此既可將A、B、C區作為獨立控制邊界,也可針對任一區域進行分段細分,進行分區或分段內的泵群組合控制,從而實現試驗場內潮流控制,模擬沿岸流、旋轉流和多向流等復雜流態,滿足不同類型、不同規模的模型試驗研究。
2.1.3 生潮單元系統控制算法
該生潮單元運用專家預估PID自適應控制算法通過變頻器控制水泵矢量變化產生水位有規律地上升和下降,實現模擬自然界的潮起潮落過程,水位值由水位儀通過以太網實時傳輸至控制系統,形成閉環控制系統[6]。故量測儀器的精度、應用軟件的控制精度和響應速度以及通信線路的實時性等是項目成敗的關鍵。通過多種方案比選,水位儀采用珠江水利科學研究院自主研發的GS-6光柵式水位儀,精度可達到0.05 mm;控制軟件采用珠江水利科學研究院研發的最新版黃河口實體模型生潮測控系統,該軟件采用自適應的控制算法,很好地解決了水位跟蹤滯后和波動的問題,控制穩定可靠、精度高,潮位曲線跟蹤控制水位均方差小于0.2 mm,絕對誤差小于1 mm,相位測量誤差小于5 s,最大潮差10 cm,且可以由給定的調和常數,自動生成潮位曲線;儀器和計算機之間的通信采用無線以太網和工業以太網相結合的方式,既保證了數據的穩定性,又提供了工作的便捷性。
2.2 潮汐量測儀器系統
為實現黃河口實體模型潮汐控制系統的各項功能,用到的量測儀器有:GS-6自動跟蹤水位儀;LS-8C八線紅外流速采集儀;LSC-40流速測桿。這些量測儀器均為珠江水利科學研究院自主研發。
儀表配電柜布置在模型四周,柜內安裝有線和無線網絡路由器及電源插座。現場各種儀器設備就近有線和無線接入儀表配電柜,借助以太網技術可以實現分區數據量測的同步進行,便于中心監控計算機控制生潮設備,實現系統的靈活搭配組合。
2.3 整體系統軟件
該軟件系統采用WINDOWS 7平臺下的VC++開發,利用多線程技術,實現多任務實時控制,多過程的同步顯示;可實現測量、顯示、實時控制和率定等功能,提高了軟件系統的控制精度和運算速度,方便用戶使用。該系統實現了生潮和加沙一體化的功能,并具備智能潮汐控制和水力學要素實時采集等功能,各要素的控制和采集可分布控制又可聯動運行[7]。
在已有的潮汐控制系統的基礎上進行進一步改進,增加網絡數據庫、專家PID控制策略和以太網通信功能等,使該生潮系統更加完美。系統軟件走潮控制界面見圖6。
3? PIV流場監測技術
流場PIV技術實時測量系統由珠江水利科學研究院自主研發,是運用數字圖像處理技術和粒子跟蹤測速技術研制開發的大范圍表面流場測速系統。該系統由圖像采集、流場分析和流場后處理等模塊構成,可幫助用戶高效便捷地掌握水工模型、河工模型、港工模型及水槽等試驗中大范圍的表面流場信息。同時,該系統具有強大的分析功能,便于用戶完成測量數據的各種分析處理工作。它的應用節省用戶的試驗時間,提高試驗的效率和精度,保證科學研究的準確性和可信度。該系統使用簡單方便,分析快捷準確,結果穩定可靠[8]。
黃河口實體模型PIV鏡頭覆蓋區域見圖7,實測PIV表面流場分布見圖8。
該系統計算準確、快速,無需過多人為干預,能連續反映流態的過程變化;標定程序與邊界生成簡單,通過采集標定點和邊界點坐標即可快速實現邊界生成和坐標標定;適用于各種不同的視蹤粒子,如塑料顆粒和紙花;單路有效測量面積可達4 m2×5 m2;系統的測量誤差小于7%;流場計算結果可直接供AutoCAD應用;測速范圍為0.15~8 m/s。
4? 來水來沙全自動控制技術
系統用于黃河口實體模型河道到入海口的來水來沙模擬,包括進口清水流量和渾水流量的測量和控制。該系統由北京尚水信息技術股份有限公司研發。
4.1 清水控制
為提高清水控制精度,該模型采用2套供水管路可更精準地控制清水最大流量和最小流量的調節。水泵采用先進的變頻控制系統以滿足實驗對流量的不同需求,不僅控制精度高,而且操作方便。
流量反饋控制分別采用管道流量計采集數據,然后反饋至軟件控制系統實現對流量精準調節。
流量控制過程為上位機的軟件程序發送初始流量的控制指令到綜合控制箱,通過綜合控制箱轉換為控制信號后發送到變頻器,通過變頻器調節水泵的轉速來控制水泵的出流,使管道中產生了一定的流量,此時電磁流量計測量管道的流量并反饋給綜合控制箱,進行信號轉換后發送到上位機,上位機軟件根據當前流量與目標流量的差值,發出下一步的控制指令調節水泵,如此反復,通過多次閉環調節使管道中的流量達到目標流量。
4.2 渾水控制
系統設置兩套水泵分別從兩個攪拌池內抽取攪拌后的渾水,可根據攪拌池內水量靈活控制任何一路水泵開閉,渾水流量控制通過孔口箱加沙流量控制模塊進行,孔口箱加沙流量控制模塊可實現渾水小流量的精準控制,從而提高實驗精度。
孔口箱加沙流量控制模塊主體孔口箱可存儲一定容量的初始泥漿,采用溢流設計以維持固定的水位高度,孔口采用橫條式矩形斷面設計,可實現過流面積與流量的線性變化。
開度控制執行模塊采用電動伸縮式閘門設計,通過伺服電機提供動力,控制閘門在水平方向按照設定的行程精確移動,實現孔口開度大小的精確調節,結合開度-流量關系曲線,實現渾水流量精確控制。
5? 結語
黃河口實體模型可模擬黃河口海域海洋動力過程及尾閭河道演變、水沙運動過程,研究不同流路淤積延伸、發育出汊過程,為黃河口清水溝流路水沙調配及穩定百年的黃河口入海流路方案研究提供技術支撐。該文以重建后的黃河口實體模型為例,介紹了海域潮汐自動化控制技術、PIV流場監測技術和來水來沙全自動控制技術在物理模型試驗中的應用。基于分布式泵群控制技術的潮汐控制系統能很好地滿足物理模型的要求,具有技術含量高、控制精度高、易于安裝維護、運行操作簡便等特點。流場PIV技術實時測量系統能夠準確、快速地測量大范圍的表面流場信息。來水來沙全自動控制技術用于黃河口實體模型河道到入海口的來水來沙模擬。
參考文獻
[1] 吳國英,劉剛森.黃河口實體模型生潮設備和控制技術研究與討論[J].中國水運,2014,14(11):190-191.
[2] 伊鋒.黃河入海泥沙減少對潮灘地貌沖淤影響的物理模型研究[D].魯東大學,2020.
[3] 于守兵,凡姚申,余欣,等.黃河河口生態需水研究進展與展望[J].水利學報,2020,51(9):1101-1110.
[4] 萬浩平,楊楠.鄱陽湖物理模型量測控制系統設計與應用[J].長江科學院院報,2018,35(7):153-158.
[5] 萬浩平,楊楠,李昌垣.河工模型量測控制系統設計與應用——以贛江下游尾閭整治工程為例[J].人民長江,2017,48(24):102-105.
[6] 夏云峰,杜德軍,屈波,等.大型潮汐河工模型試驗控制系統設計及應用[J].水利水運工程學報,2018(1):1-8.
[7] 李路,齊同,郜晩蕾,等.基于專家PID控制和卡爾曼濾波的恒壓進樣系統[J].電子設計工程,2018,26(18):54-58.
[8] 孔苓青.基于專家PID算法的礦井提升機調速系統研究[D].山東科技大學,2017.
