樓梯扶手清掃機器人的動力特性研究
2021-09-25 09:35:26李劍英陳子華李墁強陳瑞欣譚新海張銳博
機械工程師 2021年9期
關鍵詞:分析
李劍英, 陳子華, 李墁強, 陳瑞欣, 譚新海, 張銳博
(肇慶學院機械與汽車工程學院,廣東肇慶 526061)
0 引言
國內外學者對清掃機器人進行了大量研究,也有了廣泛的市場應用。賀廉云[1-2]提出利用平行四邊形形變特點實現上下樓清掃功能的機器人;張嘉偉[3]提出了一種新型清潔機器人結構的整體設計方案及硬件設計思路,該清潔機器人適用于商業場所,且對所設計的機構進行了分析;周冬冬等[4]基于蟻群算法并結合家庭清掃機器人所遇障礙物,通過環境建模實現清掃機器人的路徑規劃;魯重鋼等[5]基于STM對智能清掃機器人進行開發。樓梯清掃機器人能否穩定平順地爬行是研究關注點。Yuan[6]和Liu等[7]各自設計了一種輪腳混合式爬樓機器人,其輪子與腳部的上下組合伸縮實現平穩上下樓;Takahisa Kakudou等[8]研究了一種平移方式爬升方法,通過傳感器識別樓梯;姜雪梅[9]設計了一種采用雙臂協調運動控制方法,實現自動下樓的機器人,用于樓梯、樓道自動清潔,該機器人用絲杠實現升降;姚興田等[10]設計了一種基于單片機的樓道清潔機器人控制系統,該系統可實現樓道清潔機器人的智能路徑識別、避障、上下樓及清掃功能;王雪飛[11]基于STM設計了樓道清潔機器人控制系統;張磊等[12]設計了使機器人與梯面保持平行的運動方式,防止機器人在踏步上移動時的跌落與碰撞,針對機器人在踏步難轉身的問題,介紹了變半徑轉身及邊前后挪動邊轉身的新方法;張磊還先后設計了平動旋轉腿式樓梯清潔機器人[13-14]和升降伸縮式樓梯清潔機器人[15]。王福鑫等[16]設計了一款智能樓道清掃機,其行星輪爬升裝置帶著整個清掃機爬升,清掃裝置可以實現橫向清掃。
國內外學者對清潔機器人和樓道清掃機器人進行了大量研究,但對樓梯扶手清掃機器人的關注暫未見文獻報道,本文擬建立樓梯扶手清掃機器人的數字化模型,在此基礎上采用ADAMS軟件分析其攀爬齒輪傳動機構和夾緊固定機構的動力特性。最后,比較仿真分析結果與理論設計,本文研究結果可為樓梯扶手清掃機器人的設計提供理論依據。
1 樓梯扶手清掃機器人的結構及基本原理
樓梯扶手清掃機器人結構組成如圖1所示,本文主要針對樓梯扶手清掃機器人的攀爬機構和夾緊固定機構的動力特性開展研究。攀爬機構為驅動齒輪嚙合傳遞動力的機構,夾緊固定機構為主驅動齒輪和對稱式齒輪及連桿組成的機構。攀爬機構布置在機器人底部,并用電動機驅動齒輪傳遞動力,進而驅動機器人攀爬;夾緊固定機構布置在機器人尾部,使機器人能固定在樓梯扶手上,并與攀爬機構共同作用,安全穩定地在扶手上爬行。

圖1 樓梯扶手清掃機器人結構
2攀爬機構動力特性分析
利用三維建模軟件對樓梯扶手清掃機器人攀爬機構進行數字化建模,該模型為一對相互嚙合的齒輪副,如圖2所示。齒輪副的基本參數如表1所示,齒輪材料選用45鋼。
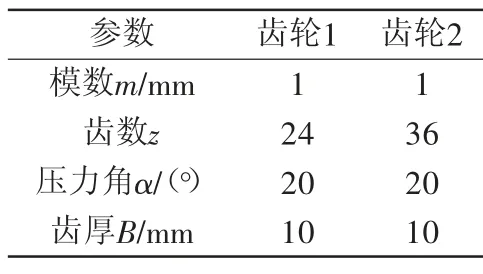
表1 齒輪副的基本參數
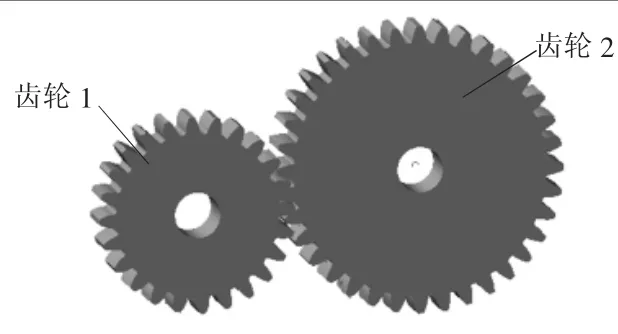
圖2 攀爬齒輪傳動機構
將攀爬機構的齒輪副數字化模型導入ADAMS軟件中進行動力特性分析,并施加接觸和驅動力,在齒輪2上添加轉速為72°/s的驅動,結果如圖3所示。

圖3 齒輪副角速度曲線
從圖3可知,攀爬機構的齒輪副轉速為107.6 °/s,與理論計算值108.0 °/s基本接近。
樓梯扶手清掃機器人攀爬驅動選用的是直流減速強力電動機,齒輪1采用固定副,輸入6860 N·mm的轉矩添加在齒輪2上,結果如圖4所示。
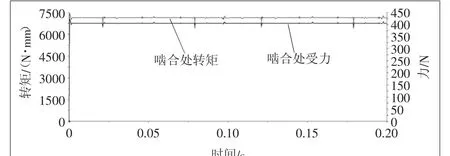
圖4 齒輪副嚙合處受力曲線
從圖4可知,滿載時輸出穩定,輸出轉矩大小為7130 N·mm,嚙合處受力為405 N,齒輪嚙合處受力在起動時瞬間增加,但沒有明顯的碰撞和波動,說明樓梯扶手清掃機器人可以平緩穩定地攀爬在樓梯扶手上,且進行下一步的清潔。
3 夾緊固定機構動力特性分析
利用三維建模軟件對樓梯扶手清掃機器人的夾緊固定機構進行數字化建模,夾緊固定機構由主驅動齒輪、對稱式齒輪、連接桿和圓柱銷組成(如圖5)。將夾緊固定機構的數字化模型導入ADAMS軟件中進行動力特性分析,部件采用轉動約束、固定約束和點接觸,以及在圓柱銷接觸處添加動摩擦力,本文選用的摩擦因數為0.1,并在主驅動齒輪上添加36 °/s的轉速。
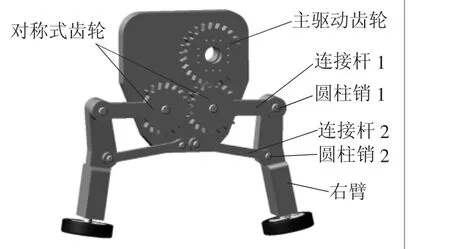
圖5 夾緊固定機構數字化模型
3.1 連接桿1的動力特性分析
添加轉速為36 °/s在主驅動齒輪上,對連接桿1的加速度、角速度和角加速度進行分析,結果如圖6所示。
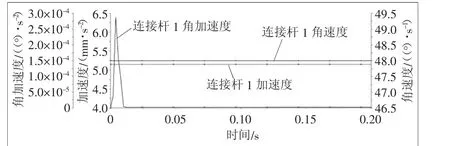
圖6 連接桿1的加速度、角速度和角加速度曲線
從圖6可知,在0~0.01 s內連接桿1的角加速度有瞬時變化,從0增大至3.0×10-4°/s2后又減小,分析發現,短時間內有微小振動的主要原因是電動機帶動齒輪的瞬間有一定沖擊,但瞬間的不穩定不會對整個運動過程產生影響,在0.01 s后連接桿1的角加速度穩定地接近于0,說明清掃機器人能很好地在扶手上夾緊;連接桿1的加速度仿真結果為5.15 mm/s2,與理論計算值5.00 mm/s2基本保持一致,說明連桿1受力穩定,幾乎沒有振動和晃動;連接桿1的角速度仿真結果為48 °/s,與理論計算值48 °/s結果保持一致。
3.2 連接桿2的動力特性分析
添加轉速為36 °/s在主驅動齒輪上,對連接桿2的加速度、角速度和角加速度進行分析,結果如圖7和圖8所示。
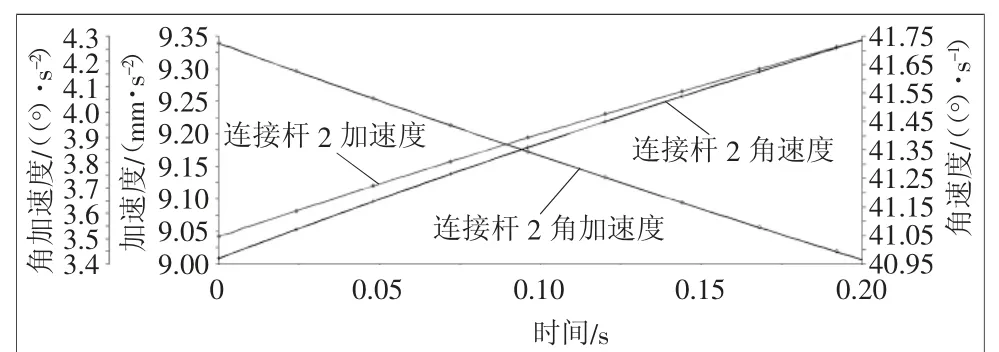
圖7 連接桿2的加速度、角速度和角加速度曲線
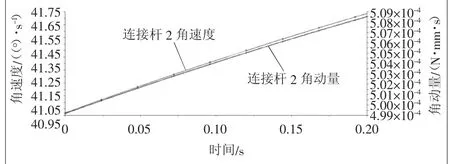
圖8 連接桿2的角速度和角動量曲線
從圖7可知,連接桿2的加速度和角速度均增加,但增幅均較小,分析發現,主要原因是右臂帶動連接桿2運動,傳遞給連接桿2的力逐漸增加,但增幅較小。角加速度逐漸減小從而使角速度增加緩慢,運動平穩,夾緊過程平順,其主要原因是圓柱銷內部潤滑劑與摩擦力緩沖了起動過程的沖擊與振動。對比各曲線的變化可知,連接桿2的加速度、角速度和角加速度變化值均較小,說明夾緊固定機構的轉速和受力較穩定。
從圖8可知,通過分析連接桿2的角動量發現,其仿真值和理論計算值幾乎保持一致,如選取0.1 s處的數值計算得轉動慣量為1.22×10-5kg·mm2,與理論計算值1.20×10-5kg·mm2幾乎一致,且連接桿2在連接桿1穩定的狀態下被驅動時角速度和角動量的變化范圍都很小。
3.3 圓柱銷1的動力特性分析
添加轉速為36°/s在主驅動齒輪上,對圓柱銷1的單位轉矩、平移速度和平移加速度進行分析,結果如圖9所示。
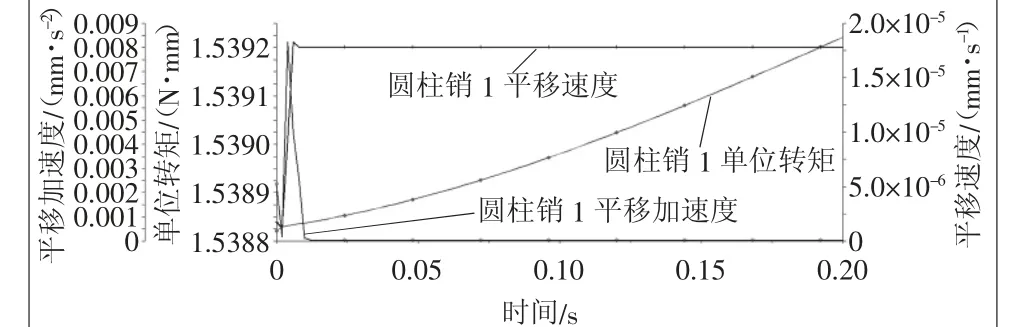
圖9 圓柱銷1的單位轉矩、平移速度和平移加速度曲線
從圖9可知,圓柱銷1的單位轉矩在1.5388 ~1.5392 N·mm小范圍內增加,且增速較慢,其平均值為1.5390 N·mm,與理論計算值1.5400 N·mm相差不大,通過分析圓柱銷1的平移速度和平移加速度可知,圓柱銷1的平移速度較慢且穩定,穩定時平移加速度為0,說明運動過程摩擦力緩沖了沖擊與振動。圓柱銷1在0~0.01 s內平移加速度變化的主要原因是起動過程的微小沖擊與振動。
3.4 圓柱銷2的動力特性分析
添加轉速為36 °/s在主驅動齒輪上,對圓柱銷2的單位轉矩、平移速度和平移加速度進行分析,結果如圖10所示。
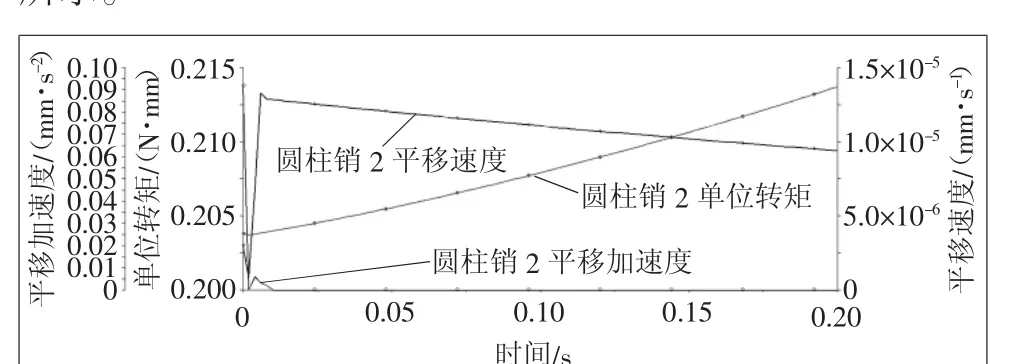
圖10 圓柱銷2的單位轉矩、平移速度和平移加速度曲線
從圖10可知,相較圓柱銷1,圓柱銷2的單位轉矩要小得多,在0.204~0.214 N·mm范圍內增加,且增速也較慢,其平均值為0.209 N·mm,約為圓柱銷1單位轉矩的1/7。通過分析平移速度和平移加速度可知,圓柱銷2的平移速度減小較慢且穩定,穩定時平移加速度為0,說明運動過程摩擦力緩沖了沖擊與振動。進一步分析可知,圓柱銷2在運動過程沖擊載荷和單位轉矩都較小,運動較為平穩。
4 結語
在建立樓梯扶手清掃機器人數字化模型基礎上,通過ADAMS對其攀爬齒輪傳動機構的動力特性進行分析,分析結果表明:齒輪驅動傳動時受力較為平穩,樓梯扶手清掃機器人的攀爬過程較穩定,幾乎沒有振動;對夾緊固定機構的連接桿和圓柱銷的動力特性進行分析,研究表明,機器人在攀爬和固定時,夾緊固定機構的傳動和受力較平穩,且不會在啟動時產生較大沖擊,具有良好的穩定性,本文研究結果可為樓梯扶手清掃機器人的設計提供理論依據。
猜你喜歡
現代畜牧科技(2021年9期)2021-10-13 06:39:14
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
電子制作(2018年18期)2018-11-14 01:48:24
山東工業技術(2016年15期)2016-12-01 05:31:22
當代經濟研究(2016年5期)2016-12-01 03:12:05
現代農業(2016年5期)2016-02-28 18:42:46
出版與印刷(2016年3期)2016-02-02 01:20:11
中國中醫藥現代遠程教育(2014年11期)2014-08-08 13:23:44
華北水利水電大學學報(社會科學版)(2014年3期)2014-04-16 04:38:31
終身教育研究(2014年5期)2014-02-28 01:23:06
