一種基于實車工況的LKA仿真方法
2021-09-26 19:37:39張峻熒,蘇芮琦,黃波,王士焜
汽車科技 2021年4期
張峻熒,蘇芮琦,黃波,王士焜

摘? 要:本文提出了一種用于驗證車道保持輔助系統(LKA)控制策略的仿真方法,在分析從仿真測試到實車驗證過程中關鍵環節對策略驗證可靠性的影響的基礎上,提出的仿真方法綜合考慮了傳感器特性、控制器特性和執行部件特性。本文中LKA控制策略采用了單點預瞄模型,用于驗證的測試用例是依據LKA典型應用場景定義的,車輛動力學模型是在VeDYNA中搭建的,交通場景模型是在VTD中搭建的,實車工況數據來源于真實攝像頭、真實控制器和線控轉向機。通過對比添加誤差模塊前后的仿真數據和實車測試數據驗證了本文提出的仿真方法的合理性。
關鍵詞:車道保持輔助系統;LKA;仿真方法;實車工況
中圖分類號:U467.5? ? 文獻標識碼:A? ? 文章編號:1005-2550(2021)04-0008-07
A LKA Simulation Method based on Real Vehicle Conditions
ZHANG Jun-ying, SU Rui-qi, HUANG Bo, WANG Shi-kun
( Xiangyang Da An Automobile Test Center CO. LTD, Xiangyang 441004, China )
Abstract: This paper proposes a simulation method for verifying the control strategy of Lane Keeping Assist System (LKA).On the basis of analyzing the impact of key points on the reliability of strategy verification from simulation testing to actual vehicle verification. The simulation method comprehensively considers sensor characteristics, controller characteristics and executive component characteristics. In this paper, the LKA control strategy uses a single-point preview model. The test cases used for verification are defined based on the typical application scenarios of LKA. The vehicle dynamics model is built in VeDYNA, and the traffic scene model is built in VTD. The vehicle data comes from cameras, controllers and wire-controlled steering gears. The rationality of the simulation method in this paper is verified by comparing the simulation data with deviation module , the simulation data without deviation module and the actual vehicle test data.
Key Words: Lane Keeping Assistance System; Lka; Simulation Method; Working Condition Of Actual Vehicle
1? ? 引言
行業普遍預測,自動駕駛車輛落地量產前至少需要開展170億公里以上的測試來完成系統功能驗證和迭代開發,通過實車測試來覆蓋如此龐大的里程周期長、成本高,且很多場景只能在特定的道路結構、氣象條件和交通環境中實現,而這些因素大多不受控,構建代價大、危險系數高甚至無法構建。而通過交通場景和車輛動力學模擬的仿真手段,可以解決實車測試的諸多難點,在仿真測試中可以快速發現自動駕駛策略中可能存在的風險點,是加速自動駕駛研發過程和保證安全的核心環節。2020年年初,發改委、工信部等11個國家部委聯合出臺的《智能汽車創新發展戰略》明確虛擬仿真測評技術是健全智能汽車測試評價體系中的研發重點之一,可見仿真測試已成為自動駕駛領域公認的研發和評測技術手段。根據仿真驗證目的和適用階段的不同,大致可以按照表1進行分類。
Simulink自帶品類繁多、功能強大的模塊庫,不僅支持基于模型的策略驗證,自帶的嵌入式代碼生成工具也支持生成C/C++、PLC等代碼直接應用于主流廠商芯片平臺,包括飛思卡爾、因特爾、英飛凌、恩智浦、瑞薩等。較早期因為芯片計算能力限制,從SIL環節開始基本要進行定點化處理來節約計算資源,如今DSP和最新MCU的浮點運算功能都已經很強大,支持用浮點數生成或者編寫的代碼。因此將浮點運算的MIL環節中的策略模型直接生成代碼燒寫到控制器中已成為較通用的技術手段。
2? ? 仿真驗證與實車測試的分析
上圖為MIL仿真測試原理圖和架構圖,就LKA測試驗證而言,其與實車測試的區別主要體現在以下幾方面:
2.1? ?交通場景
LKA涉及的交通元素主要是車道線,實際道路測試時車輛前方車道線在LKA所用智能攝像頭中的成像效果是影響LKA識別特性的根源,這與車道線本身顏色、寬度、形狀、連續性有關,也與周邊環境如光照、天氣、污漬、陰影等有關,還與車輛顛簸等車輛動態特性有關。MIL測試無真實攝像頭和車道線識別模塊,是將仿真場景中車輛上虛擬攝像頭視野中的車道線真值以二階/三階方程、坐標點或其它的方式發給LKA控制策略,即基本不考慮前述因素的影響。
LKA涉及的主要車輛動力學為轉向系統動力學,其核心部件目前較通用的為線控轉向機,影響轉向機轉向能力的因素有很多,除轉向系統自身以外還有如輪胎特性、道路結構、車輛載荷分布、車輛懸架設計等,轉向機控制器一般會通過多層閉環或者補償算法來減少這些因素對轉向能力的影響,但轉向時滯和轉向誤差是無法完全避免的。在仿真軟件中可以通過配置方向盤與轉向輪的傳遞關系來定義轉向特性,可以為線性或者非線性,仿真時系統就會按照配置的關系進行轉向,轉向是理想化的,基本無動態時滯和誤差。
2.2? ?實時性
實車測試中,從行車交通場景成像到車輛執行完成過程中,主要耗時包括攝像頭圖像處理時間、控制器運行時間和執行器響應時間,其中攝像頭車道線識別處理耗時一般在幾十毫秒級,控制器中策略運行耗時一般也在幾十毫秒級,執行器的響應時間一般在幾百毫秒級。仿真場景中耗時主要包括圖形工作站運行VTD交通場景耗時、VeDYNA生成的車輛數學模型計算耗時和Simulink 中LKA策略模塊運算的耗時,其中交通場景耗時與工作站性能有關,一般在十毫秒級,在性能強大的硬件平臺上車輛數學模型和LKA策略模塊的運行耗時即便將Simulink求解器定步長設置為毫秒或者秒級時實際耗時一般也在微秒級。可見在實時特性方面,仿真測試與實車測試差異極大。
2.3? ?誤差
根據前述對模型生成代碼過程、MIL測試原理、實車測試與仿真測試場景差異的介紹和分析可知,誤差的產生主要包括數據類型轉換誤差、傳感器識別誤差和執行器響應誤差幾個方面。
3? ? 仿真方法的實現
3.1? ?仿真軟件環境
本文方法論實現和驗證過程中的車輛動力學模型和交通場景模型采用的軟件分別是VeDYNA和VTD。VeDYNA通過可視化界面配置整車參數,動力學模型搭建過程簡單;擁有較豐富的車輛動力學模型庫,不需要龐大的工作量即可搭建滿足控制策略功能驗證需求的測試車輛模型;采用Simulink建模接口,易于擴展自定義功能。VTD可提供復雜交通環境視景建模,為智能駕駛提供逼真的場景和傳感器模型;內部高度模塊化的同時外部接口兼容性又極強,支持OpenCRG/OpenDrive/OpenSCENARIO等外部數據導入。因此通過VeDYNA、VTD和Simulink 聯合仿真來驗證控制模塊是目前自動駕駛領域較通用的技術手段之一。
3.2? ?LKA策略模型搭建
基于單點預瞄最優曲率模型的橫向控制理論是一個經典的算法,在橫向控制領域現有公開的研究成果中很多都是在單點預瞄理論上進行了算法補償或優化得到算法簡單且魯棒性強的工程應用效果。本文LKA控制策略是在單點預瞄控制基礎上加入了目標軌跡規劃功能和反饋控制模塊,策略架構如圖2所示,控制的目標包括車輛位置和航向角,目標是使車輛中心與車道中心線距離為零的同時使車輛航向與車道中心線的夾角為零。
3.3? ?車輛動力學模型搭建
車輛動力學模型從VeDYNA車輛庫中選擇了一輛中卡,按照道路測試搭載車輛參數設置了關鍵參數,包括:轉向形式為前輪轉向,輪距為2.4m、軸距為5m、轉向比為定比25、方向盤轉向角度范圍為±900°。
3.4? ?基于實車特性的模型搭建
LKA的控制方式一般包括轉向角度控制和轉向力矩控制兩種模式,本文以方向盤角度和角速度作為控制目標,攝像頭識別車道線結果的表達方式本文采用二階曲線方程。在實車測試中的關鍵數據傳遞關系如圖4所示,具體傳遞的關鍵信息如表2所示:
結合章節2對仿真測試與實車測試差異的分析,在MIL仿真環節搭建傳感器誤差模型、系統時滯模型和轉向誤差模型,以提升仿真能力和仿真可靠性。表2數據流中部分變量因子對結果的影響是相同的,因此進行合并后建立的誤差模型包括:1)傳感器誤差模型DstLft、AgLft、CrvLft、DstRgt、AgRgt、CrvRgt;2)方向盤轉向誤差模型,因實際轉向響應效果可以用車道線相對攝像頭的位姿關系來間接體現,因此此處不考慮數據流③的誤差,而轉向機模式響應誤差一般只在故障診斷功能測試時使用,本文聚焦于LKA控制功能策略的測試,因此此部分只建立數據流②中TrgtSteerSpeed、TrgtSteerAg的誤差模型;3)系統時滯誤差模型將攝像頭計算耗時、轉向機計算耗時和轉向系統響應耗時整合為一個時滯SysDelay Time。
傳感器誤差模型構建思路:根據LKA配置在實車上搭載配套具備車道線識別功能的智能攝像頭,依據LKA適用場景范圍采集典型場景中攝像頭識別車道線的輸出結果,如高速直道、高速彎道、城際直道、城際彎道等;根據經驗分析影響識別誤差的主要因素有氣象條件、車道線磨損情況、車道線相對攝像頭距離、道路形狀,因仿真能力限制和仿真測試需求本文僅依據車道線相對距離和道路形狀兩種影響因素統計各場景中車道線各參數的誤差均值和方差形成數據庫,依據車道線相對攝像頭距離分為遠距、中距、近距,依據彎道半徑將道路形狀分為直道、彎道1、彎道2、彎道3,通過分類進行組合形成誤差模型;本文中LKA適用于左右車道線基本平行的道路,因此AgLft和AgRgt可采用相同的誤差模型,CrvLft和CrvRgt可采用相同的誤差模型。以AgLft/AgRgt為例形成的傳感器誤差模型庫如表3所示:
本文試驗采集的部分實車數據如圖5所示,通過數據統計記錄左側車道線、右側車道線、航向角、曲率的誤差均值和均方差值。
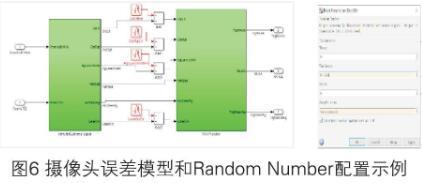
在假設車道線數據、方向盤轉角數據均符合高斯正態分布的前提下,本文中誤差模型是通過在仿真數據基礎上疊加Simulink中的Random Number 模塊來實現誤差模擬。Random Number的輸入包括均值、方差、隨機數種子和采樣時間,其中均值和方差來源于實車數據采集和統計形成的數據庫,采樣時間依據攝像頭數據處理周期進行配置,隨機數種子作用是區分均值、方差、采樣時間均相同的兩組數據。攝像頭誤差模塊DstLftErr 、DstRgtErr、AgLaneToVehErr、LaneCrvErr添加在VeDYNA數據解析后、LKA控制策略前,如圖6紅色模塊所示:
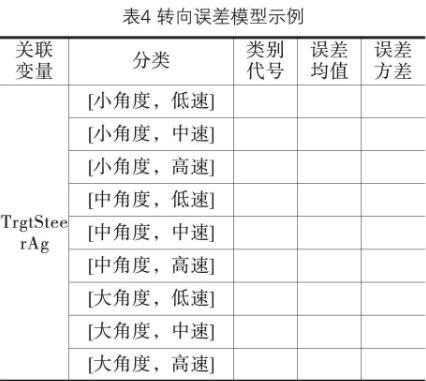
方向盤轉向誤差模型構建思路:根據LKA配置在實車上搭載配套的線控轉向機,通過發送目標角度,統計轉向系統響應的情況。從實測某量產轉向機響應情況來看,誤差大小的主要影響因素有道路橫坡程度、道路縱坡程度、車輛左右載荷差異程度、路面摩擦系數、當前方向盤角度和目標角度差值、目標角速度等。前四個影響因素均需借助額外傳感器進行統計,受限于試驗條件限制,本文僅依據后兩個因素統計方向盤轉向角度誤差形成誤差數據庫,根據當前方向盤角度和目標角度差值分為小角度、中角度、大角度,根據角速度分為低速、中速、高速。因控制策略中對輸出的方向盤目標轉向角度進行限斜率處理時已引入目標轉向角速度作為斜率限制參數,無法將其與目標轉向角度解耦,因此本文的方向盤轉向誤差模型只有TrgtSteerAg,形成的誤差模型庫如表4所示:
本文試驗采集的部分轉向系統響應數據如圖7所示,統計其中轉向模式為自動駕駛模型(數據中WorkMode為1)時的目標方向盤轉向角度指令和實際方向盤轉向角度的誤差。
同理,轉向誤差模塊也是通過Random Number 實現的,其中采樣時間依據轉向系統響應耗時進行配置。轉向誤差模塊TrgtSteerAgErr疊加在LKA策略輸出的方向盤目標轉向角度上,即設置在VeDYNA輸入端,如圖8紅色模塊所示:
系統時滯誤差模型的搭建相對簡單。雖然在Simulink中VeDYNA生成的數學模型和LKA控制策略模型運行耗時與實車運行耗時不在一個量級,但按照Simulink設置的定步長設置時延也能正確表達時延與策略運行間的數學關系,從而模擬實車測試中時延的影響。本文中LKA實車數據采集和測試采用的攝像頭數據處理耗時約66ms,LKA控制器運行周期為20ms,轉向機控制器運行周期為10ms,轉向系統時延約100~200ms,因此總的系統時延取200~300ms,該時延可以設計在方向盤目標轉向角度輸入到VeDYNA端處來實現。根據LKA控制器運行周期設定Simulink定步長為20ms,系統時延SysDelayTime設置10-15個定步長即可,如圖9紅色模塊所示:
4? ? 仿真方法的驗證
4.1? ?測試用例定義
本文根據LKA適用場景設計了直道和彎道場景,依據ISO 11270-2014測試程序對測試道路的要求設計了道路結構,依據ISO 11270-2014橫向加速度限值設計了不同彎道的測試速度。表5列舉了部分典型測試用例。
根據測試用例定義在VTD中搭建的直道和彎道交通場景效果如圖10所示:
4.2? ?測試結果
本文將相同的LKA控制策略分別應用于未添加誤差模塊的MIL測試、添加誤差模塊的MIL測試和相似場景的實車測試,分別采集測試中車輛車速VehSpd_kmph、車輛中心相對車道中心線的實際距離ActDst_m、車輛中心相對車道中心線的目標距離TrgtDst_m、車輛航向相對車道中心線的實際夾角ActAg_rad、車輛航向相對車道中心線的目標夾角TrgtAg_rad、LKA觸發狀態StLKA(1表示觸發)。圖11和圖12是場景Test1和場景Test3的測試數據。
從數據可以看出,直接將仿真場景數據用于LKA策略驗證測試時,車輛的橫向位置和航向角都會非常平穩、準確地趨向目標,基本完全滿足LKA系統開發需求;而添加誤差模塊之后的仿真場景數據用于該LKA策略驗證測試時,車輛的橫向位置和航向角會在目標位置左右擺動,需要優化LKA策略才能滿足系統開發需求;實車驗證該LKA策略時,車輛的橫向位置和航向角均在目標位置左右擺動,該策略未達到系統開發需求。因實車和仿真觸發時刻車輛初始航向角、方向盤初始轉角等初始條件不一致,所以實車測試時車輛擺動的具體數值與添加誤差模塊測試時的數值不完全相同,但趨勢和現象基本一致,可以驗證本文方法論的合理性。
5? ? 結語
本文提出的將基于實車工況建立的攝像頭識別誤差模型、轉向誤差模型、系統時延模型應用于LKA仿真測試的方法,能夠大大縮小MIL測試與實車測試的差異,提高仿真測試的準確性和可靠度,提升LKA系統開發和迭代效率。因現有傳感器配置條件限制,本文誤差模型分類時依據的影響因素尚不完整,后續計劃將更多誤差影響因素納入到誤差模型數據庫建立中,進一步提高模型準確度。
參考文獻:
[1]丁能根,冉曉鳳,張宏兵.基于單點預瞄最優曲率模型的單軌車輛駕駛員模型[J].機械工程學報,2008,44(11):220-223.
[2]Intelligent transport systems—Lane keeping assistance systems (LKAS) — Performance requirements and test procedures[S]. ISO 11270-2014.
[3]陳無畏,談東奎,汪洪波,王家恩,夏光.一類基于軌跡預測的駕駛員方向控制模型[J].機械工程學報,2016,52(14): 106-115.
[4]曾杰,夏鈞,王戡,胡雄,蘇占領,吳昆侖.商用車車道保持輔助系統測試分析[J].客車技術與研究,2019(3):45-48.
[5]孟醒,甘海云,嚴英.基于虛擬場景的車道保持輔助系統仿真測試[J].智能網聯汽車,2019(24):34-36,51.