基于載波相位差分定位的輸電線路無人機自主巡檢研究及應用
2021-09-26 01:18:54程亮亮
機電信息 2021年24期
程亮亮


摘要:目前,輸電線路無人機巡檢以人工操作為主,自動化程度不高,難以實現標準化、規范化,使得無人機巡線時間偏長,甚至會發生墜機、炸機等問題。載波相位差分定位技術(RTK)可為無人機提供航向信息,使無人機獲得高精度的二維信息,有助于實現無人機自主巡檢。鑒于此,提出了一種基于RTK差分定位的輸電線路無人機自主巡檢方法。首先由人工操控無人機進行線路巡檢,再根據記錄的巡檢航跡提取航拍軌跡點精確的經緯度、海拔高度和每一航拍點的攝像頭俯仰角度等信息,進行無人機航線規劃,最終據此設定的軌跡控制點按預設角度進行航拍,實現無人機巡檢的流程化和標準化作業。現場試驗結果表明,該方法可以在強電磁場環境下快速準確地完成定點巡航任務。
關鍵詞:載波相位差分定位;輸電線路;無人機;自主巡檢
0 ? ?引言
近幾年,作為新興的巡檢工具,無人機已憑借其機動靈活、成本低、環境要求低、便于攜帶和運輸、可帶電作業、不受地形限制等諸多優勢,在輸電線路的日常巡檢與精細化巡檢作業中得到了廣泛應用。國網公司于2015年在公司范圍內開始全面推廣小型多旋翼無人機和固定翼無人機巡檢;南方電網公司于2015年成立機巡中心,重點發展電力無人機應用能力,發布標準體系,開展核心技術攻關工作[1]。我國輸電線路巡檢由此逐漸形成了“機巡為主、人巡為輔”的運維管理新模式,也推動了輸電線路無人機作業安全管控、缺陷智能識別等關鍵技術的研究和應用。
但隨著這些技術的應用,人工操控要求高、空間定位精度不高、智能化程度低等問題逐漸顯現了出來,再加上輸電線路所在地域、地貌及各種自然因素的影響,對運維人員的飛行操控技能要求也越來越高,無人機巡檢開始面臨運維人員不敢飛、不愿飛等問題。基于此,以載波相位差分定位技術(RTK)為支撐,首先由人工操控無人機開展線路飛巡,然后利用無人機記錄的航線軌跡將航拍軌跡點精確的經緯度、海拔高度和攝像頭俯仰角度等信息提取出來,進行無人機航線規劃,即可據此進行無人機自主巡檢,實現無人機巡檢的規范化和標準化作業。
1 ? ?無人機自主巡檢原理
傳統的無人機巡檢,由人工操控無人機對桿塔及線路各部件進行近距離高清拍攝。但因地面無人機操控人員的視角不同,無法進行精確定位,工作效率較低,且會因定位精度影響無人機巡檢圖像和線路設備檢測的有效性[2-3]。
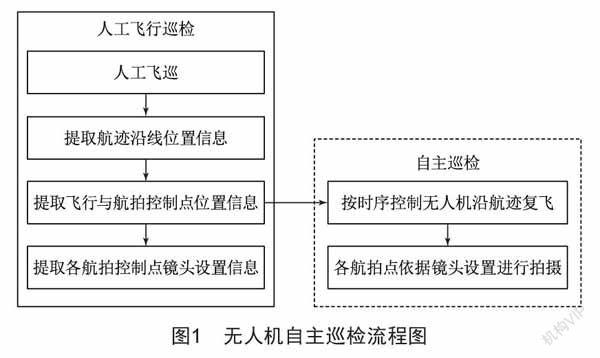
輸電線路無人機自主巡檢,首先需要規劃出相應的飛行航線。無人機航線由一系列航點構成,航線規劃的實質就是航點設計及巡檢點坐標設計。無人機飛巡時,無人機控制系統會記錄GPS、驅動系統和飛控信息。利用飛控信息可重新構建無人機巡檢的航線軌跡,且能利用航拍時記錄的時間和控制系統相關記錄,確定各航拍點的高精度位置信息及攝像頭的參數設置。然后,將無人機航跡和航拍點設置為控制點,同時根據無人機平臺的編程接口(API)函數,對各控制點按順序進行設置,并在航拍點對攝像頭進行參數調整和設置,最終就能進行無人機高精度飛巡和航拍[4],實現無人機自主精細化巡檢。
無人機自主巡檢的流程如圖1所示[5]。
2 ? ?基于差分定位的無人機自主巡檢
基于復現人工操控的無人機自主巡檢關鍵技術在于精確的空間定位。傳統的無人機巡檢主要基于GPS導航定位,但因需要計算三維位置及偏差,在使用過程中至少需要4顆衛星。其優勢是:觀測時間短、提供三維坐標、操作簡便、全天候工作、功能多、成本低。但該技術也存在弊端,它可能因為各種原因產生定位誤差。例如,衛星星載時鐘和接收機上的時鐘并不能始終保持同步,這就會造成時間上的偏差信號;如果在傳播過程中受到大氣層和各種障礙物的反射,信號傳播路徑就可能變長,造成測距誤差等。這類定位誤差較大,精度一般在米級,甚至有時會超過10 m,因此難以進行高精度定位的無人機自主巡檢。
差分GPS技術利用地面設置的GPS基準站,對比分析接收機解算的基準站位置和基準位置,可得到當地GPS接收機定位誤差,將該定位誤差發送至流動的GPS接收站,無人機即可利用該誤差對自身位置進行實時修正,以獲得高精度定位。獲取定位誤差的方法包括位置差分法、載波相位測量法和偽距測量法[6]。
RTK是Real-time kinematic的縮寫,即實時動態,又稱載波相位差分技術,這是一種新的常用的GPS測量方法,它能夠將GPS系統的定位誤差縮減到厘米級。
2.1 ? ?RTK差分定位技術
RTK差分定位技術的原理和偽距差分技術的原理相同。用戶站通過基準站的數據鏈同步實時獲取載波觀測量和站坐標信息,根據其接收的GPS衛星載波相位和基準站載波相位可獲得相位差分觀測值,然后進行實時處理,就能得到實時的厘米級高精度定位結果。載波相位差分GPS方法一般分為兩種:差分法及修正法。修正法與偽距差分原理相同,用戶站通過基準站獲得載波相位修正量,修正自身載波相位,并進行坐標求解。差分法則是將基準站獲得的載波相位發送給用戶站進行求差,獲得解算坐標。修正法可稱為準RTK技術,差分法才是真正的RTK技術。
但當無人機飛行至變電站、鐵礦等干擾性較強的區域時,即使是采用RTK定位,強磁場干擾仍會導致無人機電子羅盤無法準確判斷航向,使無人機懸停位置偏移。針對該情況,則可將無人機RTK定位技術與雙天線測向技術相結合。原有的無人機RTK定位采用一根天線,智能獲取基準站和流動站的位置關系,不能準確提供流動站的航向信息。雙天線測向技術則是在原來的基礎上再增添一根天線,流動站分別接收解算兩路信號,并將其中一路天線的數據作為基準,向另一路天線發送解算修正信息,實現天線2與天線1的相對精準定位,獲取兩根天線的相對矢量。經過數據處理后,基于該矢量,無人機可獲取高精度的位置和航向信息。目前,大疆(DJI)創新提出的D-RTK高精度導航定位技術就是采用的該技術[7]。
猜你喜歡
人間(2016年26期)2016-11-03 17:52:40
中國科技博覽(2016年22期)2016-11-01 18:19:47
中國科技博覽(2016年22期)2016-11-01 18:10:31
中國科技博覽(2016年19期)2016-10-19 13:11:05
科技視界(2016年22期)2016-10-18 14:30:27
科學與財富(2016年28期)2016-10-14 20:23:24
科學與財富(2016年28期)2016-10-14 04:19:29
科學與財富(2016年28期)2016-10-14 03:48:23
科學與財富(2016年28期)2016-10-14 00:42:58
企業導報(2016年9期)2016-05-26 20:58:26
