履帶式變形機器人樓梯攀爬運動控制研究*
2021-09-27 12:08:40崔瑞超司靜靜遲明路
河南工學院學報 2021年3期
關鍵詞:變形
崔瑞超,司靜靜,遲明路
(1.河南工學院 電氣工程與自動化學院,河南 新鄉 453003;2.河南工學院 智能工程學院,河南 新鄉 453003)
0 引言
隨著機器人技術、人工智能技術的迅速發展,履帶式變形機器人在民用生活、軍用實戰、工業生產等方面已得到廣泛的應用[1-2]。目前,履帶式變形機器人應用于平坦環境的研究已經相當成熟,但對履帶變形機器人越障的研究還有很大的提升空間[3-4]。眾所周知,樓梯是環境中一種最典型、最特殊的障礙物,研究履帶式變形機器人攀爬樓梯的運動控制具有重要的實際意義。
1 總體設計
本文提出一種履帶式變形機器人攀爬樓梯控制系統,采用STM32F103作為主控芯片,主要包括主控部分、信息采集部分、執行部分。信息采集部分負責感知環境信息和機器人的機身信息,主控部分負責分析感知到的信息并做出對應的任務規劃,執行部分負責完成規劃的運動任務。系統整體具有感知環境信息、任務規劃以及決策執行等方面的能力,系統框圖如圖1所示。

圖1 系統框圖
信息采集部分包括超聲波測距模塊、煙霧測量模塊、姿態測量模塊、溫濕度測量模塊;主控部分接收并處理采集到的數據信息,規劃路徑和向執行模塊發送行為指令;執行部分包括電機、編碼器、減速器、驅動電路,根據主控部分發出的行為指令對電機進行控制,并將實時運行信息反饋給控制器。機器人運動控制平臺如圖2所示。

圖2 機器人運動控制平臺
2 硬件設計
根據總體設計及功能要求,硬件部分主要包括電源模塊、通信模塊、傳感器模塊、主控部分、驅動控制模塊、電機。硬件設計框圖如圖3所示。

圖3 硬件設計框圖
2.1 STM32F103主控器
主控部分是整個控制系統的核心,負責處理傳感器模塊采集到的數據信息,實現對執行部分的控制,使整個系統達到預期的功能要求。
主控器使用STM32F103芯片,該芯片采用Cortex-M3內核架構。STM32F103的SRAM和FLASH分別為64KB、512KB,處理器為32位,CPU主頻為72MHz,具有2個高級定時器、4個通用定時器、2個基本定時器、1個CAN、1個USB、1個SDIO接口、1個FSMC接口、1個12位DAC、3個12位ADC、2個IIC、3個SPI、5個串口、112個通用I/O口。STM32F103具有電壓能耗低、處理性能高、使用空間大、成本低、實時性能強、集中度高、開發利用相當方便等優點[5-6],可以滿足使用者的各種要求。

圖4 STM32F103主控器
2.2 測距傳感器
測距傳感器采用超聲波模塊,利用超聲波測距原理探測機器人到兩側障礙物的距離[7],傳感器原理如圖5所示。
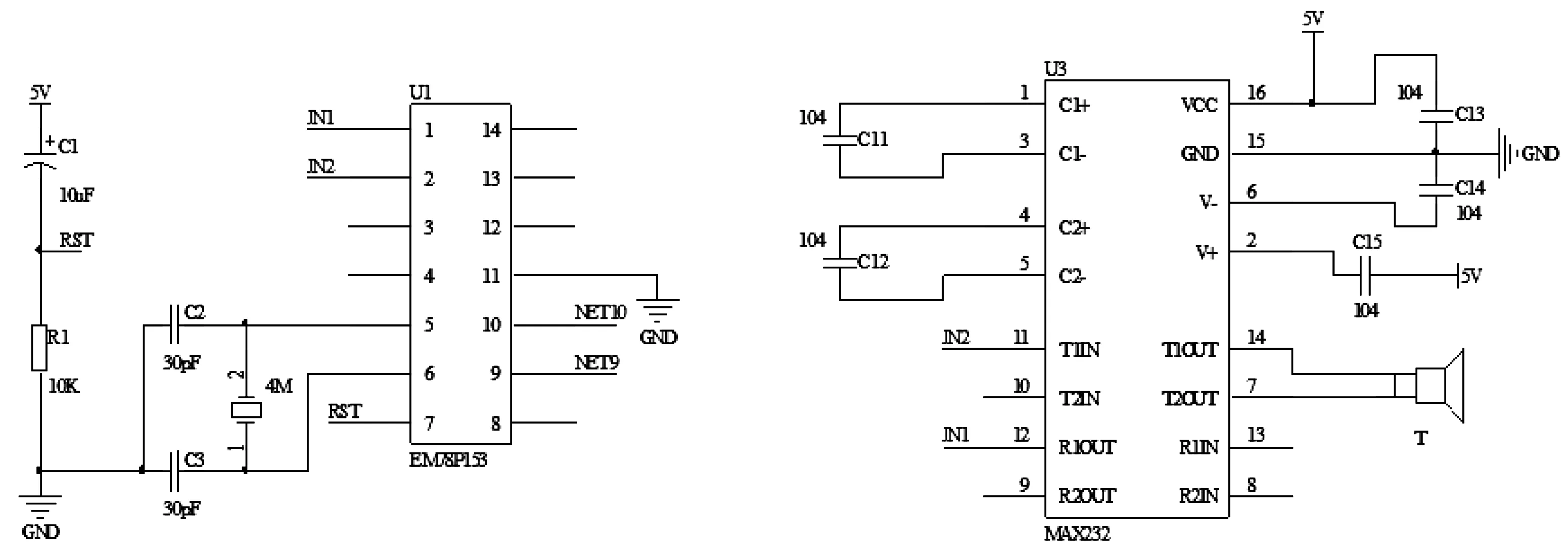
圖5 測距傳感器工作原理圖
2.3 姿態傳感器
姿態傳感器選用可以獨立完成姿態算法處理的MPU-6050傳感器,該傳感器通過姿態運算,可以把測量的模擬量轉化為數字量,算出俯仰角、偏航角、翻滾角[8-9]。其工作原理如圖6所示。
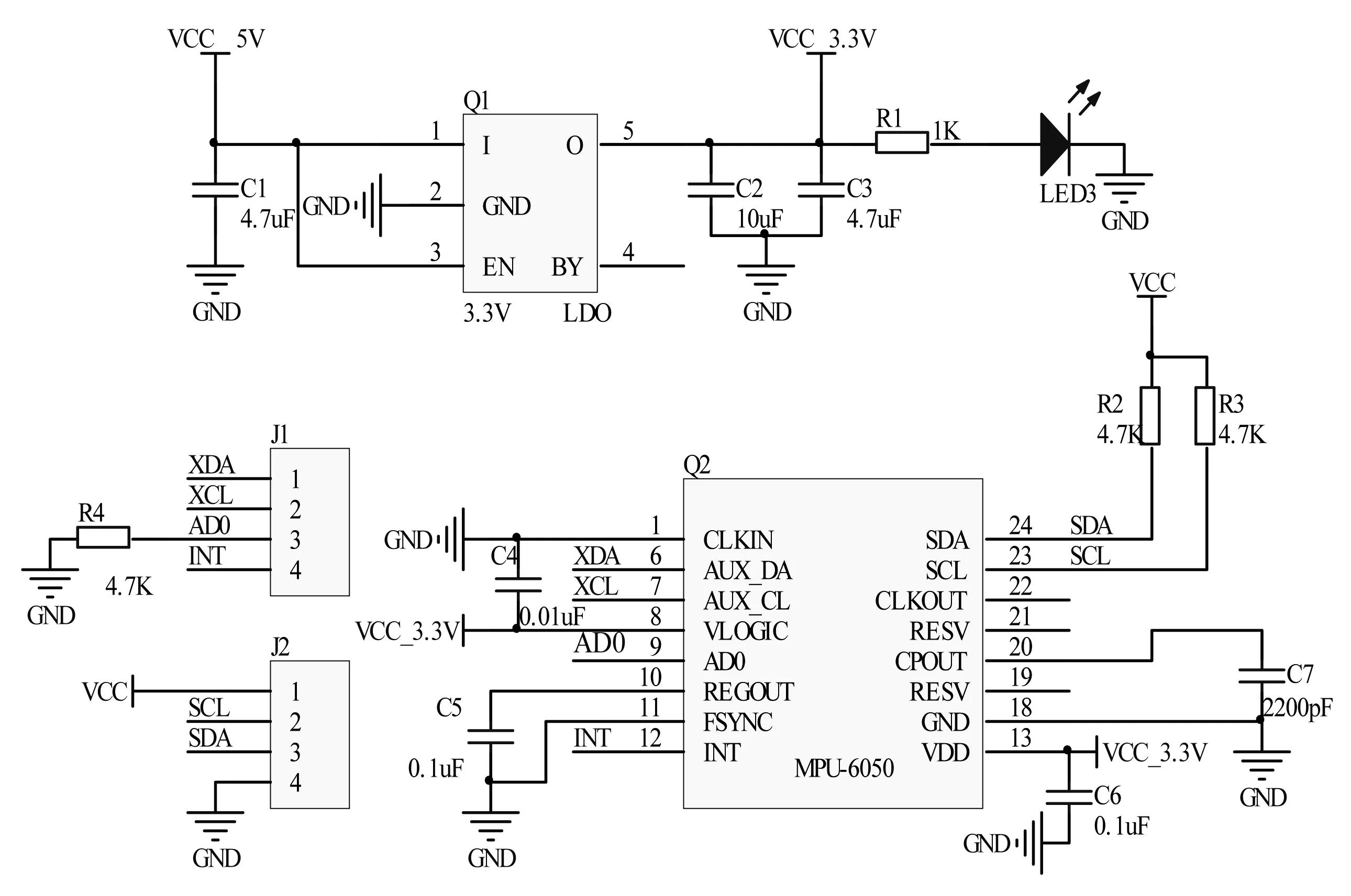
圖6 姿態傳感器工作原理圖
3 軟件設計
履帶式變形機器人在攀爬樓梯過程中的兩個控制變量分別為位置偏移比值Q和偏航角θ。位置偏移比值Q通過對測距傳感器采集的數據進行計算得到,偏航角θ通過對姿態傳感器采集的數據計算得到。自主攀爬樓梯控制框圖如圖7所示,dL、dR分別表示機器人距離樓梯左側和右側的距離,Q表示離樓梯左右兩側距離的比值,V為機器人的勻速移動速度。
行駛方向控制器的主要作用是根據傳感器測量出的偏航角判斷機器人的運行方向,其優先級最高。在攀爬過程中,主控部分首先要判定機器人的偏航角度;當機器人偏航角度較大時,履帶可能會出現打滑現象,導致機器人傾翻。居中位置控制器的主要作用是控制機器人沿樓梯中間位置爬行,其優先級低于行駛方向控制器;機器人在攀爬過程中,若偏航角度超過主控部分設定的角度限值,行駛方向控制器發生作用;若沒有超過角度限值,居中位置控制器發生作用,并調節位置偏移比例值。
履帶式變形機器人以速度V勻速爬行時,主控部分根據傳感器采集的數據信息得出的偏航角度和位置偏移比值來控制輸出的脈沖寬度調制信號,調節左右電機的速度。
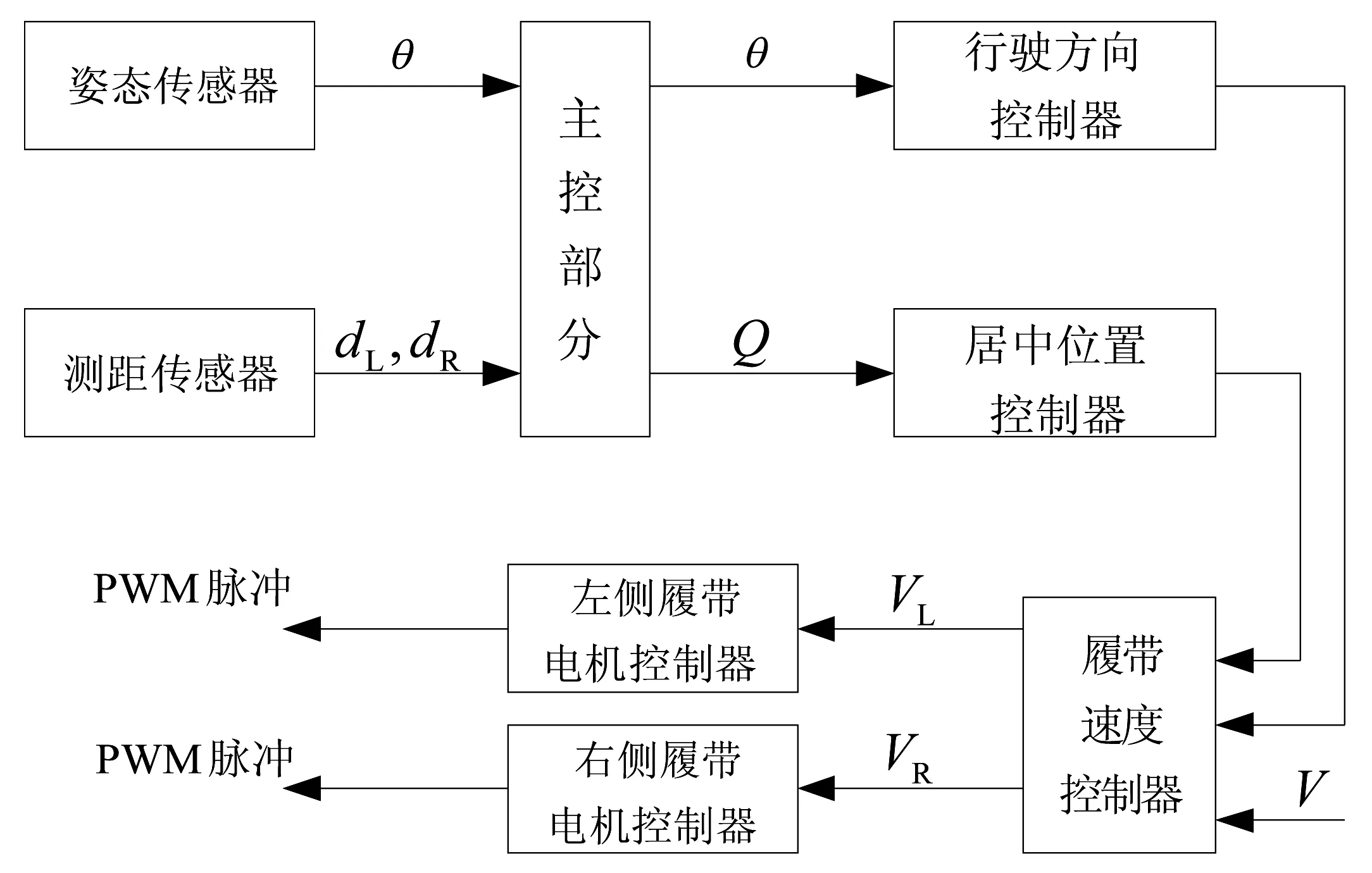
圖7 自主爬樓梯控制框圖
3.1 擺臂分析
履帶式變形機器人的履帶臂可以實現0—360°旋轉,當其遇到樓梯臺階等垂直障礙時,它的履帶臂會進行90°翻轉完成攀爬任務。圖8為運動模型示意圖。
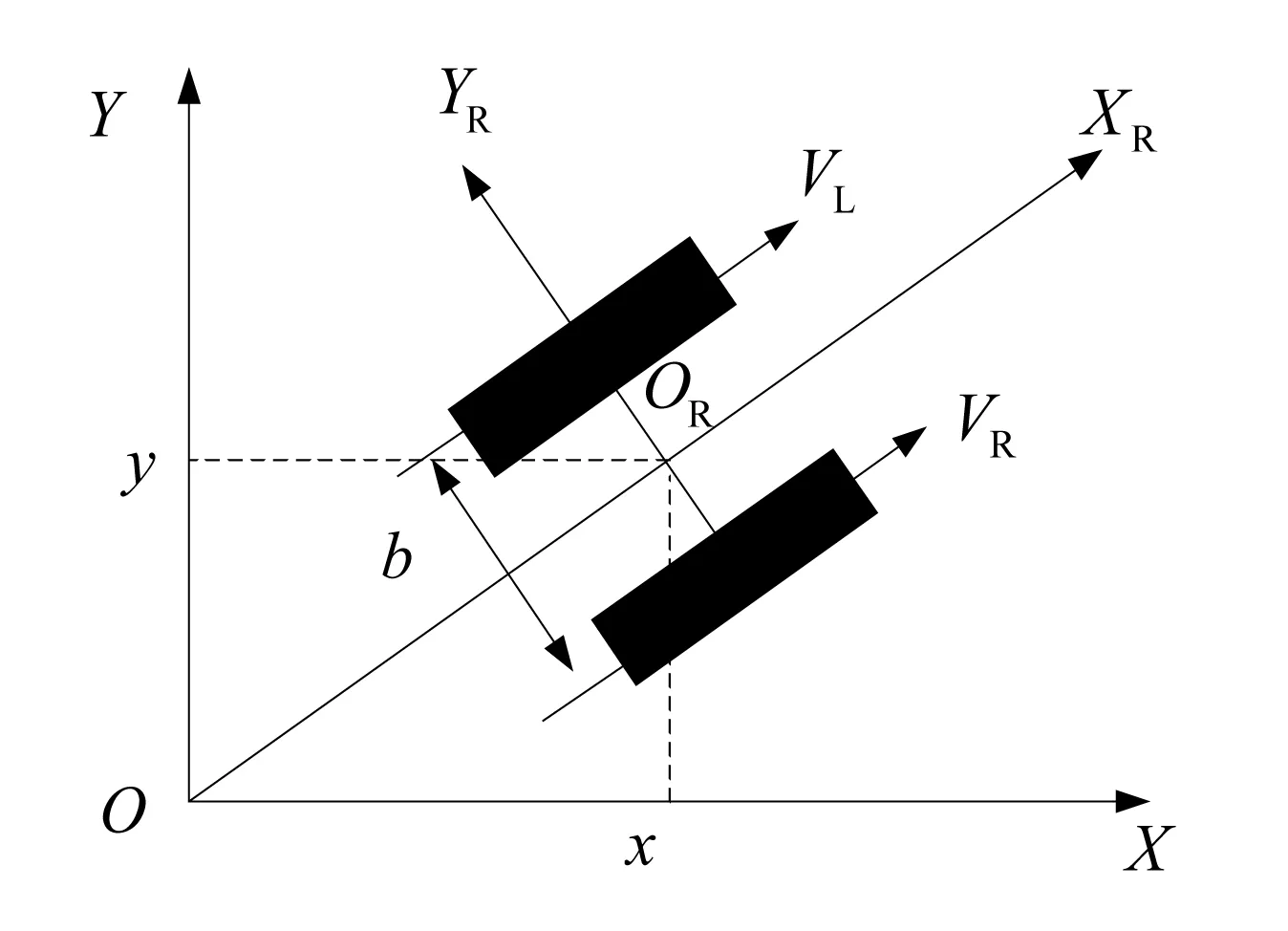
圖8 運動模型示意圖
在圖8中,(X、O、Y)是世界坐標系,(XR、OR、YR)是位于機器人中心的坐標系,XR與YR為正交關系,XR表示機器人的運行方向,VL和VR分別代表左輪和右輪運動速度,b表示機器人車身寬度。機器人在運行中偏離X軸的角度用θ表示,定義θ>0表示機器人做逆時針方向運動,θ<0表示機器人做順時針運動。
對運動模型進行數學分析[10],可以得到機器人在圖形中的坐標變化。機器人運動的坐標用(x,y)表示。設點(0,0)為機器人的起始坐標,經過一段時間t,運動軌跡x(t)、y(t)、θ(t)滿足:

(1)

(2)

(3)
機器人的履帶臂上安裝有驅動電機,機器人遇到樓梯時通過擺臂運動實現攀爬前進。擺臂運動模型和擺臂履帶系統如圖9所示。
設t=0時,機器人位于原點O處,t時間后,機器人以角速度ω轉動左右履帶前臂至旋轉角度θ處,可得出:
θ=ω·t
(4)
當機器人兩個履帶前臂的驅動電機接收到相同大小、相同方向的速度信號時,機器人的旋轉角速度ω為:
(5)
式中,D1表示電機與旋轉臂上齒輪數之比,即減速比;n表示電機轉速,單位為r/min。由式(4)、(5)得:
(6)
通過對擺臂運動進行數學分析得出,當機器人旋轉履帶臂的驅動電機接收到同向同速信號時,機器人會做出擺臂運動來完成攀爬樓梯任務。

圖9 擺臂運動模型和擺臂履帶系統
3.2 爬樓梯控制研究
履帶式變形機器人在攀爬樓梯時,運動姿態直接影響攀爬效果,所以,機器人的姿態控制是本文主要的研究目標。為了更好地識別環境信息,更準確地判斷機器人姿態,機器人本體安裝有傳感器模塊,主控器將傳感器采集到的信息進行加權融合計算;計算后的數據更接近實際值,然后再將數據與主控器給定的目標指令進行比較;當比較誤差較大時,機器人會調節電機轉速來減小誤差,調整機器人姿態。因此,機器人可以按照設定的軌跡完成攀爬樓梯任務。運動控制流程如圖10所示。
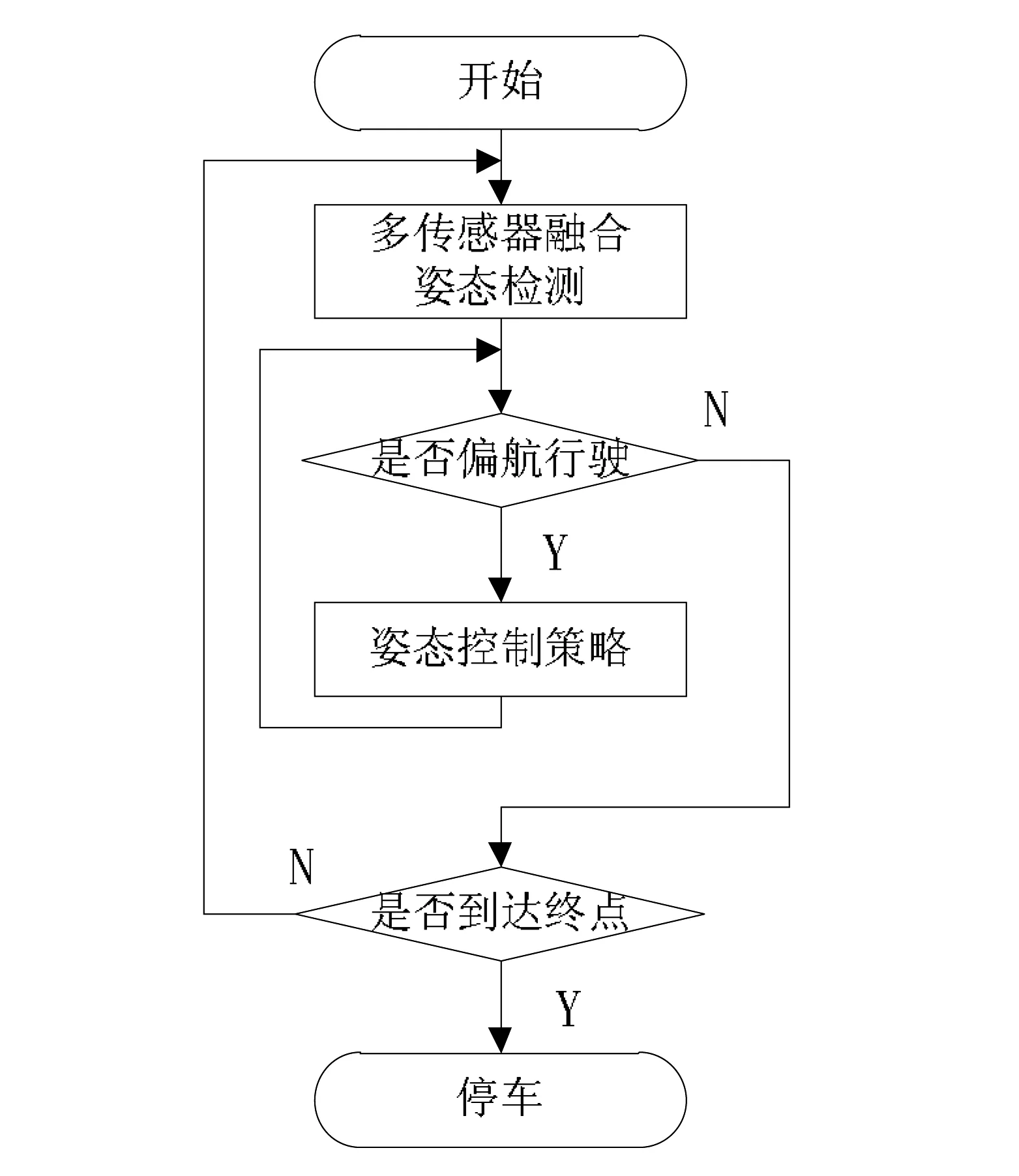
圖10 運動控制流程圖
3.3 控制算法設計
PI(Proportional Integral)調節器是由比例、積分組成的一種線性控制器,它根據給定值與實際輸出值構成控制偏差,將偏差的比例積分和積分通過線性組合構成控制量,對被控對象進行控制。
(1)比例環節是對系統在某一時刻產生的偏差做出反應,即當出現偏差時,向著偏差變小的環節進行調節[11];
(2)積分環節是把偏差變化的累加輸出,當出現偏差時積分輸出就會累加,輸出控制量來消除偏差[12]。
離散的PI表達式為:
(7)
式中,KP是比例系數,e(k)為第k次采樣時刻輸入的偏差,u0為PI控制的初值,KI是積分系數,T表示采樣的周期,TI表示為積分常數。
若采樣周期T很短,離散過程有可能接近模擬控制過程,若被控對象是變化的,變化的增量為Δu(k)。
增量式PI表達式為:
(8)
式中,KI為積分系數,KP為比例系數,u0為初始值。由式(7)、(8)得:
Δu(k)=KP[e(k)-e(k-1)]+KIe(k)
(9)
式中,e(k-1)、e(k)分別為第k-1次和第k次采樣時輸入的偏差。
機器人攀爬樓梯控制的目標就是調整運動姿態,姿態傳感器檢測機器人位置信息,PI調節器控制機器人兩側電機的運行速度,進而達到調整機器人姿態的目的。機器人姿態控制框圖如圖11所示,當偏航角度與目標角度θ出現偏差時,機器人會通過PI調節器調節電機轉速,實現運動姿態控制。

圖11 機器人姿態控制框圖
機器人開始樓梯攀爬動作時,通道1、2打開,機器人左右電機等速轉動,若機器人在運行過程中出現方向偏移,PI調節器自動調節兩側電機速度,進而機器人會自動校正軌跡。為實現對機器人運動姿態的控制分析,本文對機器人左右電機速度進行MATLAB仿真,結果如圖12所示。
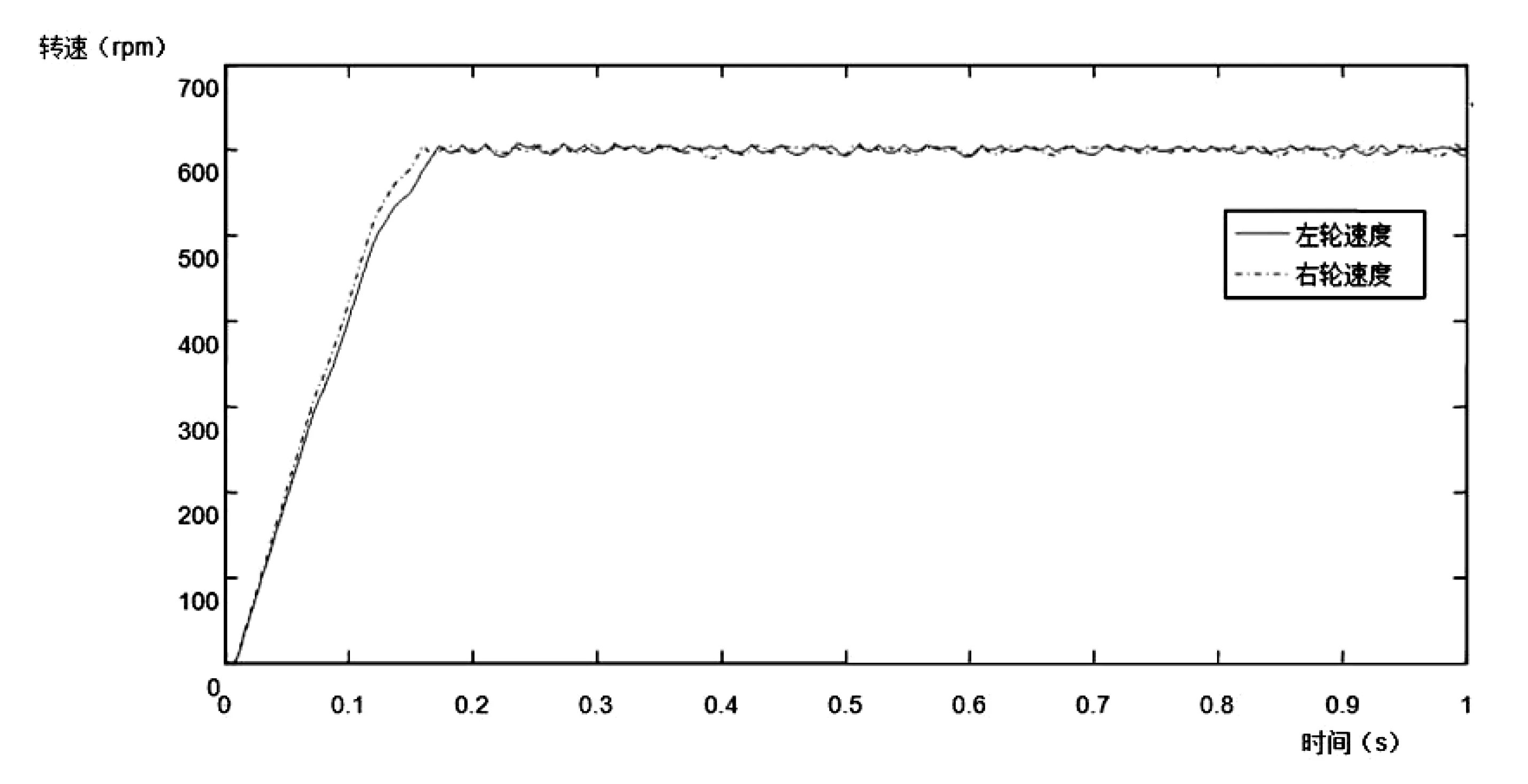
圖12 速度仿真圖
由圖12可知,機器人在運動過程中,左右輪速度基本可以保持同步。
4 試驗及分析
為驗證前述分析的正確性,制作了實物樣機并在實驗室樓梯間進行相關測試。測試過程中,通過傳感器采集數據信息得到機器人的工作狀態,根據機器人的偏航角度和偏移位置實時調節電機速度,最終實現了機器人的攀爬動作。試驗中選用的樓梯,每階寬30cm,高15cm,表1為爬樓梯試驗結果。

表1 爬樓梯試驗結果
由試驗結果可知,當機器人以不同的速度攀爬不同的臺階數時,都會存在一定的誤差;當速度增大時,誤差會出現增大的趨勢,但平均測量誤差均保持在3cm內,運行十分平穩。
5 結論
(1)本文設計的履帶式變形機器人具備較高的攀爬樓梯的能力,通過搭建的硬件平臺驗證了機器人具備較強的越障性能。
(2)本文設計的PI調節器能夠很好地保證兩側電機運轉的同步性,MATLAB仿真結果表明,兩側電機的響應曲線幾乎重合。
(3)在實驗室樓梯間進行了機器人攀爬樓梯測試,試驗測試數據誤差較小,證明系統具有較高的穩定性。
猜你喜歡
智慧少年·故事叮當(2020年10期)2020-11-06 06:19:00
中華詩詞(2020年1期)2020-09-21 09:24:52
河北理科教學研究(2020年1期)2020-07-24 08:14:34
作文成功之路·小學版(2020年11期)2020-02-01 06:26:58
作文周刊·小學二年級版(2018年29期)2018-11-26 11:20:28
小學生作文(中高年級適用)(2018年5期)2018-06-11 01:22:56
童話世界(2018年14期)2018-05-29 00:48:08
數學小靈通·3-4年級(2017年10期)2017-11-08 08:42:59
中學生數理化·七年級數學人教版(2017年11期)2017-04-23 07:18:00
數學大王·中高年級(2016年12期)2016-12-26 21:37:36