校園車流監測系統研究
2021-09-27 08:57:06安徽理工大學電氣與信息工程學院王匯芳彭思雨司逸菲
電子世界 2021年15期
安徽理工大學電氣與信息工程學院 王匯芳 洪 炎 彭思雨 司逸菲 蘇 靜
在大學生創新創業項目的平臺上,提出了一種基于視頻流的車流監測系統,以校園內的道路交叉路口為檢測區域,利用無人機進行視頻流的采集,選用背景差分法進行車輛檢測,結合虛擬線圈法完成車流量的統計。并期望將該系統應用于智能交通燈的設計,通過統計的車流量來動態的設置交通燈的等待與通行時間,同時根據車流量的大小進行限速預警,實現順暢交通和安全交通。
隨著科技時代的來臨,社會逐步向智能化演進,構建智能交通體系成為近年來備受關注的焦點。基于視頻流的車流監測系統將數字圖像處理領域的技術融入傳統的交通行業,進行車輛的檢測,識別追蹤,以及車流量的統計,為交通部門控制交通安全及流量起到了重要的作用。此次的大學生創新創業項目中,我們從高校內校園交通安全問題入手,在校園內設置道路的交叉路口為檢測區域,在不同的時間段和天氣環境條件下利用無人機進行視頻的采集,然后經過圖像處理,采用背景差分法進行車輛檢測,結合虛擬線圈法進行車流量的統計。期望可以將此系統應用于校園智能交通燈的設計,使交通燈可以根據車流情況進行限速預警,并且可以動態的改變等待和通行的時間,促進交通順暢,控制交通安全。
1 無人機場景
利用大疆min2型無人機進行車流視頻的采集,與傳統的固定監控設備相比,無人機具有高度的機動靈活性,易于操縱。但同時也具有懸停不穩定等缺點,后期需要通過對視頻圖像進行消除抖動處理。采集車流視頻時,我們先使無人機懸停在合適的位置,然后通過云臺來調整視野角度,利用高清攝像頭獲取圖像,同時發送指令控制無人機的飛行狀態。
2 基于背景差分法的車輛檢測算法
背景差分法被廣泛的應用到目標檢測技術中,具有計算量小,實時性高的優點。同時背景差分法又對光照的變化和道路的狀況較為敏感,背景會不斷的變化,而背景模型的好壞對車輛檢測的效果影響較大,所以在算法運行過程中我們還需要對背景模型進行相應的更新和動態的調整閾值。背景差分法的基本思想是根據采集的視頻序列得到背景的初始化參考模型,這里我們采用的是均值法進行背景的提取,得到背景的參考模型以后,將當前的幀圖像與不斷更新的背景參考模型作差分運算,得到差分圖像。經過閾值化得到粗前景,如果差分的結果小于某一閾值,判定為無目標出現。否則,判定為有目標出現。最后通過形態學處理得到前景圖像。
背景差分法的運算流程如圖1所示。
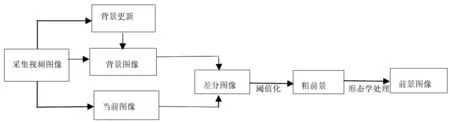
圖1 背景差分法流程圖
背景差分法的計算公式如下:

利用均值法提取出背景圖像記為B,當前幀圖像記為FK,當前幀和背景幀對應的像素點的灰度值為fk(x,y)和B(x,y),將兩幀圖像對應像素點的灰度值相減取絕對值即差分圖像Dk(x,y),設定閾值T,進行二值化處理,得到粗前景,前景點灰度值為255,背景點灰度值為0。再對粗前景進行形態學處理,閉操作,膨脹操作等得到只有車輛的前景圖像。背景差分法效果如圖2所示。
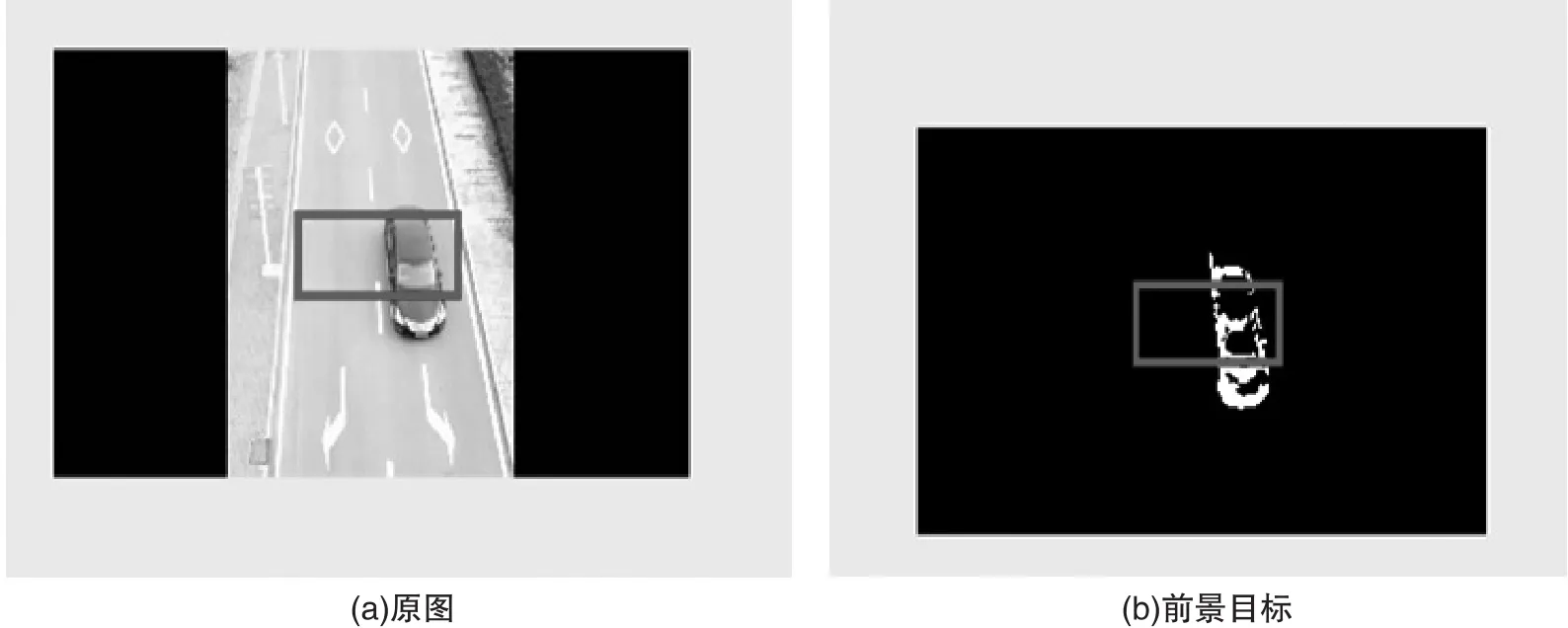
圖2 背景差分法效果圖
背景的提取算法有均值法,統計中值法,單高斯背景模型法和混合高斯背景模型法。這里我們采用的是均值法進行背景的提取,均值法的特點是計算簡便,模型簡單。基本思想是選取某一點在一段視頻序列中的灰度值的平均值來代替該點的像素值,將運動的車輛作為噪聲,用車輛運行一段時間的N幀圖像做平均,消除車輛引起的變化,得到不變的背景點像素。
該方法適用于車速穩定并且路況簡單的環境中,對于路況復雜并且行車緩慢的情況中,我們需要選取較多幀數的圖像作均值運算才能取得良好的背景效果,因此采用這種方法數據存儲量也較大。
3 基于虛擬線圈法的車流統計
用虛擬線圈區來設置感興趣的區域,不需要對采集的整幅圖像進行處理,只需要對線圈內的圖像處理即可。設置虛擬線圈的寬度為車道的寬度,高度需要大于一輛車背寬的長度,長度小于最小車型的長度且要大于兩輛車的距離。同時虛擬線圈的數目對車流量統計的結果也有一定的影響,虛擬線圈數目越多,則車流量統計的準確率越高,但不是越多越好,可能會造成重復計數,需要消耗更大的計算資源,因此,在設置虛擬線圈數目時,要綜合多種因素進行考慮。
這里我們采用的是當車輛駛出虛擬線圈開始計數的方法,對圖像進行二值化,閉操作,膨脹操作等,對車輛的信息設置標志位,標志位的初始值為零,當車輛輪廓進入虛擬線圈內時,標志位由0變為1,為了避免車輛輪廓重復計數的誤差,等車輛行進一段時間駛出虛擬檢測區開始計數,這時的標志位由1變為0。即車輛的標志位由1變成0時開始計數,其它情況均不計數。具體的車流量統計模塊的步驟如下:
(1)利用虛擬線圈設置感興趣的區域,虛擬線圈的大小;(2)設置車輛的信息標志位,標志位為1即有車輛駛入虛擬檢測區內,若為0則沒有車輛通過;(3)判斷車輛是否駛出虛擬檢測區,如果駛出則標志位為0;(4)當標志位由1變成0時,對車流量進行加1計數。
我們設置了兩個感興趣區域,分別是安徽理工大學西門與北門,采集早晨7:45至8:00和下午15:30至16:00的車流視頻,如圖3所示,我門可以得出如下結論:在同一時間段西門與北門的車流量相當,而早晨的車流量要略大于下午的車流量。
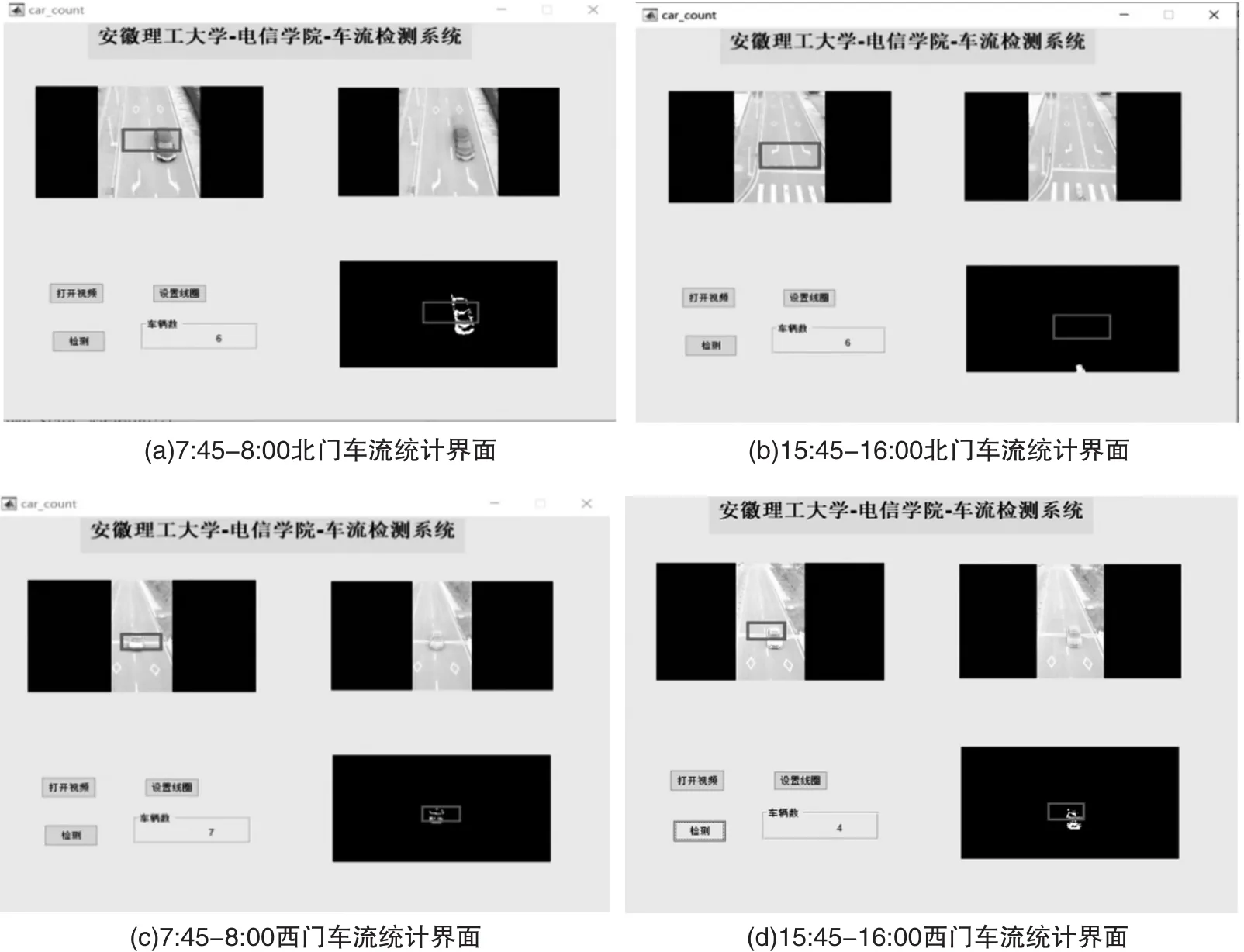
圖3 車流統計結果
4 總結及展望
本項目在實現的過程中,遇到過很多困難,從檢測區域的選擇設置,到算法的修改優化,一次次的發現問題解決問題。雖然進展緩慢,過程曲折,但是我們迎難而上,終于在小組成員的共同努力下完成了本項目。并且通過此次創新訓練項目我們的創新與實踐能力得到了進一步的提升,開拓了視野,增長了見識。
本次研究不僅提出了基于視頻流的車流監測系統,并且后期期望將此系統應用于智能交通燈的主要模塊,實時地提高交通的通行效率,控制交通安全,有利于實現交通順暢。本系統包括圖像采集,預處理,車輛檢測,車流統計四個模塊,采用背景差分法進行車輛檢測,背景差分法建立的背景模型易受環境路況和光照的影響,因此我們提出了背景的更新和動態閾值的設置。雖然可以較好的解決該問題,但仍然存在一些不足之處有待改進。車流量統計模塊我們采用虛擬線圈法設置檢測區域,虛擬線圈的大小位置以及數目需要綜合多種因素進行考慮,降低漏檢和重復計數的可能。將所統計的數據生成報告提交有關交通部門,以實現對交通流量的控制,并期望可以將該系統應用到智能交通燈的主要模塊,實現校園內無阻礙安全交通。
猜你喜歡
汽車工程師(2021年12期)2022-01-17 02:29:54
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
少先隊活動(2021年4期)2021-07-23 01:46:22
當代陜西(2020年14期)2021-01-08 09:30:42
貴州師范學院學報(2016年4期)2016-12-01 03:54:07
海峽科技與產業(2016年3期)2016-05-17 04:32:12
沈陽醫學院學報(2015年1期)2015-12-27 13:44:40
醫學教育管理(2015年3期)2015-12-01 06:43:16
