一種二次雷達(dá)詢問機(jī)數(shù)據(jù)記錄及分析方法
2021-09-27 08:57:18四川九洲空管科技有限責(zé)任公司李海軍羊洪國
電子世界 2021年15期
四川九洲空管科技有限責(zé)任公司 李海軍 羊洪國 張 江
二次雷達(dá)是空中交通管理部門實(shí)現(xiàn)雷達(dá)管制的技術(shù)基礎(chǔ),對保障飛行器飛行安全發(fā)揮了重要作用。隨著二次雷達(dá)實(shí)際運(yùn)行保障的需求提升,本文設(shè)計了一種二次雷達(dá)地面詢問機(jī)的數(shù)據(jù)記錄方法,并對記錄誤差的產(chǎn)生原因進(jìn)行了分析。對于地面詢問機(jī),可以詳細(xì)記錄每次詢問的發(fā)射時間及譯碼時間,并將這些帶有時標(biāo)的點(diǎn)跡信息發(fā)送到顯控端。在顯控端可詳細(xì)分析:詢問周期及其精度、隨機(jī)抖動值及其精度、譯碼時間、詢問及譯碼一致性等信息。該方法可較好的滿足實(shí)際系統(tǒng)的運(yùn)行保障需求。
二次雷達(dá)作為監(jiān)視飛行器的主要手段,在空中交通管制中發(fā)揮著重要作用。二次雷達(dá)主要由地面詢問機(jī)及機(jī)載應(yīng)答機(jī)組成,通過一問一答的方式,通過對飛行器的詢問與接收飛行器對詢問的應(yīng)答實(shí)現(xiàn)對飛行器的空間三維定位與數(shù)據(jù)通信。對于地面詢問機(jī),詢問和譯碼的數(shù)據(jù)記錄是二次雷達(dá)重要的人機(jī)接口,為技術(shù)人員分析雷達(dá)性能、排查故障、分析詢問應(yīng)答概率等問題提供重要參考信息。本文根據(jù)二次雷達(dá)運(yùn)行保障需求,設(shè)計了一種二次雷達(dá)地面詢問機(jī)的數(shù)據(jù)記錄方法,對每一次的詢問發(fā)射和譯碼標(biāo)記時間信息,并上報顯控,實(shí)現(xiàn)數(shù)據(jù)的顯示、回放、分析等功能,可為二次雷達(dá)的安全運(yùn)行提供有力保障。
按照ICAO規(guī)范,傳統(tǒng)空管二次雷達(dá)共有6種詢問模式,分別為1、2、3/A、B、C、D模式。如圖1所示,不同模式的詢問信號格式差異主要在P1和P3的脈沖間隔不同。
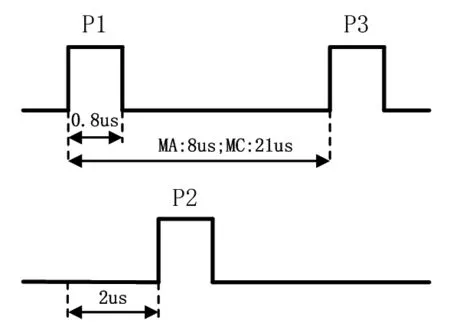
圖1 詢問信號格式
1 詢問和譯碼的時間信息標(biāo)注方法
在二次雷達(dá)開機(jī)運(yùn)行之初,如圖2所示,通過受時模塊對地面詢問機(jī)進(jìn)行一次校時,受時模塊提供的時間精度為秒級,詢問機(jī)內(nèi)部FPGA獲取實(shí)際運(yùn)行時間,此時間基礎(chǔ)上進(jìn)行內(nèi)部細(xì)分計時,計時精度為25ns(FPGA邏輯運(yùn)行時鐘40MHz),受時模塊每秒鐘向地面詢問機(jī)發(fā)射秒脈沖pps,地面詢問機(jī)以秒脈沖pps進(jìn)行秒及以上時間更新,毫秒及以下時間更新由FPGA內(nèi)部計時產(chǎn)生。詢問發(fā)射時間和譯碼時間標(biāo)記格式相同,精度均為25ns,格式為:xx年xx月xx日xx時xx分xx秒xx毫秒xx微妙xx納秒。
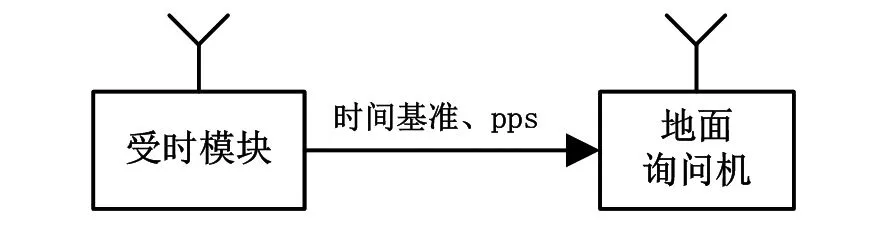
圖2 地面詢問機(jī)基準(zhǔn)時間獲取方式
為了方便后期分析,詢問時間信息的標(biāo)注時刻均為P3的上升沿,并且每種模式的P3上升沿到預(yù)觸發(fā)脈沖pre的上升沿時間間隔需一致。以MA和MC交替詢問,5ms詢問周期為例,如圖3所示,MA P3到pre時間間隔與MC P3到pre時間間隔相同,均為T1。對于詢問發(fā)送,MA P3和MC P3的標(biāo)注時刻分別為t1和t3,MA mark和MC mark為譯碼時刻,標(biāo)注時刻分別為t2和t4。詢問周期為t3-t1,在添加隨機(jī)抖動后,周期值還可以反映出隨機(jī)抖動值大小。t2-t1為M3/A詢問譯碼時間差,t4-t3為MC詢問譯碼時間差。
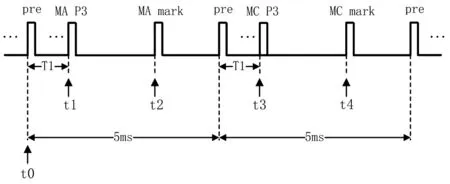
圖3 時間信息標(biāo)注方法
2 時標(biāo)信息分析
在顯控端,收集每次詢問的信息進(jìn)行統(tǒng)計分析,以5ms詢問周期為例,如圖4、圖5所示。圖4為無隨機(jī)抖動的情況,相鄰兩次詢問的發(fā)送時刻之差可以反映出詢問周期大小,計算出的詢問周期減去預(yù)設(shè)的詢問周期5ms就是隨機(jī)抖動值。圖5為添加0~64us隨機(jī)抖動后的詢問發(fā)射記錄。圖6為詢問譯碼記錄,據(jù)此可以分析詢問周期及其精度、隨機(jī)抖動值及其精度、譯碼時間、詢問和譯碼一致性等信息。這樣就可以清楚的掌握地面詢問機(jī)的每一次詢問和譯碼情況。

圖4 無隨機(jī)抖動,M3/A和MC交替詢問記錄

圖5 隨機(jī)抖動0~64us,M3/A和MC交替詢問記錄

圖6 M3/A和MC交替詢問/譯碼數(shù)據(jù)記錄
3 數(shù)據(jù)記錄誤差原因分析
在實(shí)際系統(tǒng)中,計時誤差是客觀存在的。如圖7所示,主要有以下兩種情況,一是無隨機(jī)抖動時,出現(xiàn)了25ns的抖動值,這是由于預(yù)觸發(fā)驅(qū)動時鐘和詢問計時時鐘為非同源時鐘(詢問機(jī)內(nèi)部不同硬件模塊產(chǎn)生),導(dǎo)致不同時鐘之間同步預(yù)觸發(fā)脈沖存在誤差。另外一種情況是每次秒脈沖pps更新時存在翻秒計時誤差11.150us,受時模塊和地面詢問機(jī)使用的不是同一個晶振,不同晶振間存在頻率偏差,導(dǎo)致翻秒計時誤差。結(jié)合工程實(shí)際情況,以上兩種計時誤差的存在,并不影響實(shí)際系統(tǒng)的運(yùn)行保障需求。

圖7 無隨機(jī)抖動,M3/A和MC交替詢問記錄
結(jié)束語:本文設(shè)計了一種二次雷達(dá)地面詢問機(jī)的時標(biāo)信息記錄方法,并對記錄誤差的產(chǎn)生原因進(jìn)行了分析。對于地面詢問機(jī),詢問和譯碼的數(shù)據(jù)記錄是二次雷達(dá)重要的人機(jī)接口,為技術(shù)人員分析雷達(dá)性能、排查故障、分析詢問應(yīng)答概率等問題提供重要參考信息。方便技術(shù)人員掌握地面詢問機(jī)的每一次詢問譯碼情況,為二次雷達(dá)的安全運(yùn)行提供了有力保障。
猜你喜歡
民用飛機(jī)設(shè)計與研究(2020年4期)2021-01-21 09:15:02
電子制作(2018年18期)2018-11-14 01:48:24
中華手工(2017年2期)2017-06-06 23:00:31
山東工業(yè)技術(shù)(2016年15期)2016-12-01 05:31:22
中外會展(2014年4期)2014-11-27 07:46:46
中國中醫(yī)藥現(xiàn)代遠(yuǎn)程教育(2014年11期)2014-08-08 13:23:44
終身教育研究(2014年5期)2014-02-28 01:23:06
建筑創(chuàng)作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32
祝您健康(1987年2期)1987-12-30 09:52:28
