SCARA(斯卡拉)型機械手在書法和繪圖中的應用
2021-09-27 08:57:14西安建筑科技大學華清學院張永昊王朝陽
電子世界 2021年15期
西安建筑科技大學華清學院 張永昊 王朝陽
本文介紹了一種用于書法、繪畫的水平關節機械臂的設計。通過大量的實驗與分析,將步進電機應用到機械手中,步進電機易于控制且精度高可達到機械手快速、穩定書寫、繪畫的要求。就在書法和繪圖中的應用中,SCARA(斯卡拉)型機械手相對于其他關節型機械臂來說具有成本低、易控制、運動速度快等特點。
當今社會機械與工業領域日益交融,但是機械在文化方面的交融是少之又少,因此我們提出機械手和書法繪畫相結合、這不僅是藝術和技術的交融,也是中國傳統文化的延續發展,對于提高學生書寫繪畫水平具有非常積極地意義(見圖1)。
圖1 機械手示意圖
1 總體方案的設計
總體方案從結構和控制兩方面來介紹。
結構方案為三自由度SCARA結構,通過大臂、小臂的轉動來完成末端在水平面上的移動,通過Z軸的轉動,使末端在垂直方向上的移動。垂直移動和水平移動電機分明,SCARA結構善于在平面做往返運動,具有成本低、運動速度高、定位精度高等特點。
控制方案為基于PC+單片機運動控制器的控制系統。PC端的任務為規劃任務和主要的人機交互,單片機的任務為控制運動和次要的人機交互。這種方案具有投入成本低、設備普及率高、系統開發方便等特點。
2 機械結構的設計(見圖2)
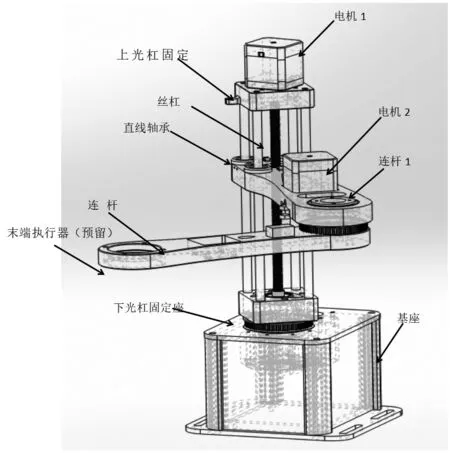
圖2 結構示意圖
就以上圖紙我們進行結構介紹:
(1)基座:基座由上下兩個鋼板、周圍四塊亞克力板、四塊鋁型材構成,其作用在于固定。
(2)Z軸(豎直)結構:此結構由光杠、絲杠、光杠固定座、直線軸承、電機1、構成,并與基座鏈接。可通過電機1使絲杠轉動,用來帶動連桿進行垂直運動。
(3)X、Y軸(水平)結構:此結構由連桿1、電機2、連桿2構成,并通過四個直線軸承和與Z軸鏈接。電機3轉動,并通過減速裝置使Z軸轉動,連桿1和連桿2也會隨之轉動。
經過以上裝置聯動,末端執行器即可以在X、Y、Z軸限位內的空間內移動。
3 運動學分析
本文主要建立在SCARA機械手坐標系的基礎上,運用數學圖解方法創建運動學模型并且進行正逆運動學分析。

正運動學分析:
已知:θ1,θ2求關節末端坐標(X-L1,Y-L1)與(X-L,Y-L)

即第一關節末端坐標為:

最終末端坐標為:

逆運動學分析:

化簡后得:

經上述計算,關節角度和末端位置便有了明確的關系,若出現了多個解,則需要取各軸移動距離最少的最優解(見圖3)。

圖3 姿態-坐標關系圖
運動學的分析主要解決的是關節和末端執行器位置和姿態的問題。對現代機械手的運動學特征進行了理論分析,有正向機械運動學的理論分析,反向機械運動學的理論分析,前者是一直各關節的參數通過算法來推出末端位置和姿態,而后者是已知末端的姿態通過算法來反推各個關節的姿態。
4 軟件設計(見圖4)
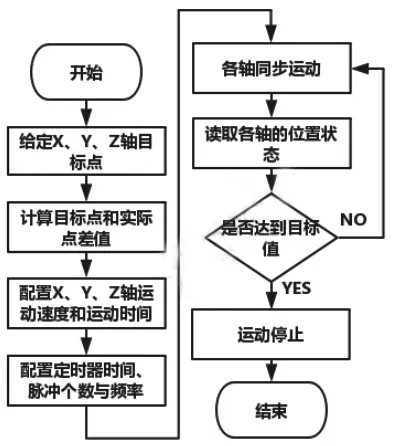
圖4 運動控制圖
5 控制系統
本機械臂的驅動器件為步進電機,控制系統通過對步進電機的控制來達到控制機械臂的目的。因本SCARA機械手結構簡單、用于書法,負載相對來說較小,發生丟步的可能性極小。故控制系統采用開環控制(見圖5)。

圖5 系統關系圖
整個系統主要部分可分為上位機(PC端)、下位機(單片機)、驅動模塊、驅動器件(步進電機)四部分構成。PC主機主要為發送位置代碼和其他控制參數,單片機負責接收數據以及按照PC端所發送的參數進行解析驅動步進電機的運行,進而可實現PC端對機械臂的控制。
結束語:隨著科學技術的不斷發展,機械臂產業已經成為本世紀的朝陽產業。本文將三自由度的SCARA(斯卡拉)型機械手作為主要研究對象,根據書法的所需軟硬件的需求,設計了三自由度的SCARA(斯卡拉)型機械手本體機構,制定了其總體方案,并且針對運動學的分析、軌跡規劃以及其控制系統等問題進行了相關的研究,滿足了在一般的書法繪畫要求。機械在文化方面上的發展有待完善。
猜你喜歡
大江南北(2022年9期)2022-09-07 13:13:48
求知(2022年5期)2022-05-14 01:28:58
娘子關(2022年1期)2022-03-02 08:18:42
哲學評論(2021年2期)2021-08-22 01:53:34
娘子關(2021年3期)2021-06-16 10:56:32
當代工人(2020年8期)2020-05-25 09:07:38
中華詩詞(2019年7期)2019-11-25 01:43:04
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
科技知識動漫(2016年8期)2016-07-29 20:40:09
