多特征融合CNN 網(wǎng)絡(luò)的旋轉(zhuǎn)機(jī)械故障診斷研究
2021-09-28 11:23:00張笑非湯浩宇
軟件導(dǎo)刊 2021年9期
冷 佳,劉 鎮(zhèn),張笑非,湯浩宇
(1.江蘇科技大學(xué) 計(jì)算機(jī)學(xué)院,江蘇 鎮(zhèn)江 212100;2.江蘇科技大學(xué)蘇州理工學(xué)院電氣與信息工程學(xué)院,江蘇蘇州 215600)
0 引言
軸承是最基本、最重要的機(jī)械部件之一,它的任何部位出現(xiàn)故障都可能導(dǎo)致機(jī)器運(yùn)行狀況惡化,發(fā)生機(jī)械故障和人員傷亡。因此,準(zhǔn)確識(shí)別軸承故障至關(guān)重要。基于振動(dòng)信號(hào)分析的故障診斷方法能有效診斷機(jī)械缺陷[1]。軸承振動(dòng)信號(hào)分析是故障診斷和故障檢測(cè)的重要途徑。用于軸承故障診斷的振動(dòng)信號(hào)處理方法一般包括特征提取和模型選擇與構(gòu)建兩個(gè)階段[2]。
在提取信號(hào)特征方面廣泛使用的是時(shí)域分析、頻域分析和時(shí)頻域分析方法。典型的時(shí)域分析是從時(shí)間序列信號(hào)中計(jì)算統(tǒng)計(jì)條件指標(biāo),常用的條件指標(biāo)包括描述性統(tǒng)計(jì),如平均值、峰值、峰間間隔和標(biāo)準(zhǔn)差。采用均方根(Root Mean Square,MS)、波峰因子等簡(jiǎn)單條件指標(biāo)檢測(cè)局部軸承缺陷的效果有限[3]。由于頻域分析可以很容易地分離和識(shí)別某些重要信號(hào)特征,它比時(shí)域分析有一定優(yōu)勢(shì);快速傅里葉變換(Fast Fourier Transform,F(xiàn)FT)[4]是一種典型的頻域分析方法,F(xiàn)FT 可有效獲取窄帶光譜。在軸承故障診斷中,高頻段和低頻段的頻譜成分都是有價(jià)值的,特別是滾動(dòng)軸承的缺陷在運(yùn)行過程中產(chǎn)生短暫的脈沖,導(dǎo)致特定頻段內(nèi)高能。一般采用時(shí)頻域分析方法來(lái)擴(kuò)展非平穩(wěn)波形信號(hào)的頻域分析能力,常見的時(shí)頻域分析方法有短時(shí)傅里葉變換(Short-Fourier Transform,STFT)[5]、Wigner-Ville 分布[6]和小波變換(WT)[7-8]等,它們可以處理非平穩(wěn)信號(hào)進(jìn)行機(jī)器故障診斷。然而,短時(shí)傅立葉變換無(wú)法同時(shí)達(dá)到最佳的時(shí)頻分辨率,Wigner-Ville 分布的交叉項(xiàng)接口以及小波變換的能量泄漏問題和基函數(shù)選擇的準(zhǔn)確性[9]限制了這些方法在軸承故障診斷中的應(yīng)用。希爾伯特—黃變換(Hilbert-Huang Transform,HHT)中的經(jīng)驗(yàn)?zāi)B(tài)分解(Empirical Mode Decomposition,EMD)是一種應(yīng)用于旋轉(zhuǎn)機(jī)械故障診斷的強(qiáng)時(shí)頻域分析方法,它對(duì)不含基函數(shù)的信號(hào)進(jìn)行分解,適用于平穩(wěn)信號(hào)和非平穩(wěn)信號(hào)[10]。雖然EMD相關(guān)方法已經(jīng)取得了成果,但隨著工況的變化,其計(jì)算量大、結(jié)果復(fù)雜[11]。
故障診斷領(lǐng)域常選擇機(jī)器學(xué)習(xí)作為分類工具,如隱馬爾科夫模型、貝葉斯網(wǎng)絡(luò)、反向傳播(Back Propagation)神經(jīng)網(wǎng)絡(luò)、支持向量機(jī)等。由于這些算法的網(wǎng)絡(luò)結(jié)構(gòu)較淺,所以特征提取能力比較差,從而難以挖掘到故障數(shù)據(jù)更深層次的微小特征。深度學(xué)習(xí)是機(jī)器學(xué)習(xí)的一個(gè)分支,因其易于訓(xùn)練和分類精度高而成為實(shí)現(xiàn)特征提取和故障識(shí)別的有效工具;為了克服傳統(tǒng)人工神經(jīng)網(wǎng)絡(luò)(Artificial Neural Network,ANNs)的不足,Lei 等[12]提出由堆疊自編碼器(Stacked_AutoEncoder,SAEs)組成的深度神經(jīng)網(wǎng)絡(luò)(Deep Neural Networks,DNNs)對(duì)滾動(dòng)軸承和行星齒輪箱進(jìn)行故障診斷,但是該方法需要將原始數(shù)據(jù)轉(zhuǎn)化為頻譜信號(hào);卷積神經(jīng)網(wǎng)絡(luò)(Convolutional neural network,CNN)作為深度學(xué)習(xí)的一個(gè)重要分支,由于其具有稀疏連通性、共享權(quán)值和局部域的特點(diǎn),能夠更好地提取深度特征,抑制網(wǎng)絡(luò)過擬合[13],因此可用于CNN 完成軸承故障診斷。Zhang 等[14]直接將原始時(shí)間信號(hào)作為1D CNN 輸入,實(shí)現(xiàn)了端到端軸承故障診斷,在噪聲和不同工作負(fù)載下實(shí)現(xiàn)了較高的診斷性能;Peng 等[15]提出基于一維CNN 的殘差學(xué)習(xí)與原始振動(dòng)信號(hào)相結(jié)合的變載荷軸承診斷方法,但原始振動(dòng)信號(hào)并不能直觀表征軸承的故障特征。針對(duì)以上使用的原始振動(dòng)信號(hào),一些研究者嘗試從圖像處理角度實(shí)現(xiàn)軸承的智能故障診斷,提供一種新的診斷思路;Li 等[16]利用STFT 和CNN 對(duì)軸承故障特征進(jìn)行提取和分類;Ding 等[17]利用深度卷積網(wǎng)絡(luò)自動(dòng)學(xué)習(xí)小波包能量(Wavelet Packet Energy,WPE),生成圖像的多尺度特征用于軸承故障診斷。但如果只是將一維原始的故障信號(hào)轉(zhuǎn)化成二維的特征圖,對(duì)故障信號(hào)直接處理會(huì)很不方便,而且很容易丟失某些故障數(shù)據(jù)的重要特征,導(dǎo)致分類不準(zhǔn)確。
根據(jù)以上分析,本文提出一種多特征融合CNN 網(wǎng)絡(luò)的旋轉(zhuǎn)機(jī)械故障診斷方法。該方法首先對(duì)振動(dòng)信號(hào)進(jìn)行連續(xù)小波變換,得到二維小波時(shí)頻圖;然后構(gòu)建多特征融合CNN 網(wǎng)絡(luò)模型。其中,原始一維旋轉(zhuǎn)機(jī)械振動(dòng)信號(hào)作為1DCNN 模型的輸入,變換而來(lái)的二維小波時(shí)頻圖作為2D CNN 模型的輸入;然后將它們分別進(jìn)行卷積層和池化層的特征提取,得到拉伸后的特征向量;最后,兩組訓(xùn)練數(shù)據(jù)在匯聚層進(jìn)行拼接,經(jīng)過全連接層和分類層后實(shí)現(xiàn)不同旋轉(zhuǎn)機(jī)械故障的具體分類。本文將一維旋轉(zhuǎn)機(jī)械振動(dòng)信號(hào)、二維時(shí)頻圖和CNN 相結(jié)合,既可以輸入時(shí)域特征,又可以輸入時(shí)頻特征,最后利用CNN 來(lái)實(shí)現(xiàn)多特征融合。該方法明顯的優(yōu)點(diǎn)是既最大程度地保留了原始一維振動(dòng)信號(hào)的某些重要原始特征,又充分發(fā)揮了卷積神經(jīng)網(wǎng)絡(luò)對(duì)二維圖像分類精確度高的優(yōu)勢(shì),從而豐富了不同維度特征,進(jìn)而提高了旋轉(zhuǎn)機(jī)械故障診斷的準(zhǔn)確率。
1 連續(xù)小波變換
小波變換廣泛應(yīng)用于提取原始信號(hào)的時(shí)域和頻域特征,通過平移獲取信號(hào)時(shí)域信息,通過縮放小波母函數(shù)的尺寸獲取信號(hào)頻域信息。它對(duì)信號(hào)的時(shí)頻域可以局部放大分析,調(diào)整尺度因子大小來(lái)改變低頻信號(hào)和高頻信號(hào)的時(shí)間分辨率及頻率分辨率,以適應(yīng)不同成分的信號(hào),因而小波分析法在故障診斷方面效果很好。
基本小波函數(shù)ψ(t)通常稱為母小波函數(shù),在此基礎(chǔ)上,一組時(shí)間尺度小波ψa,b(t)可用尺度和平移平差表示:

其中,a和b分別為尺度因子和平移因子。
對(duì)于任意信號(hào)函數(shù)ψ(t) ∈L2(R),相應(yīng)的連續(xù)小波變換定義為:

2 卷積神經(jīng)網(wǎng)絡(luò)
CNN 是一種深度神經(jīng)網(wǎng)絡(luò),其特點(diǎn)是神經(jīng)元的結(jié)構(gòu)具有權(quán)值和偏差,可以通過訓(xùn)練進(jìn)行調(diào)整。CNN 結(jié)構(gòu)主要由一個(gè)輸入層、一個(gè)輸出層和多個(gè)隱藏層組成,其中隱藏層通常包含卷積層、池化層和全連接層,其基本結(jié)構(gòu)如圖1 所示。許多CNN 結(jié)構(gòu)已經(jīng)在圖像處理、形狀識(shí)別和視頻分析中得到應(yīng)用,這些都證明了CNN 模型的有效性[18-19]。
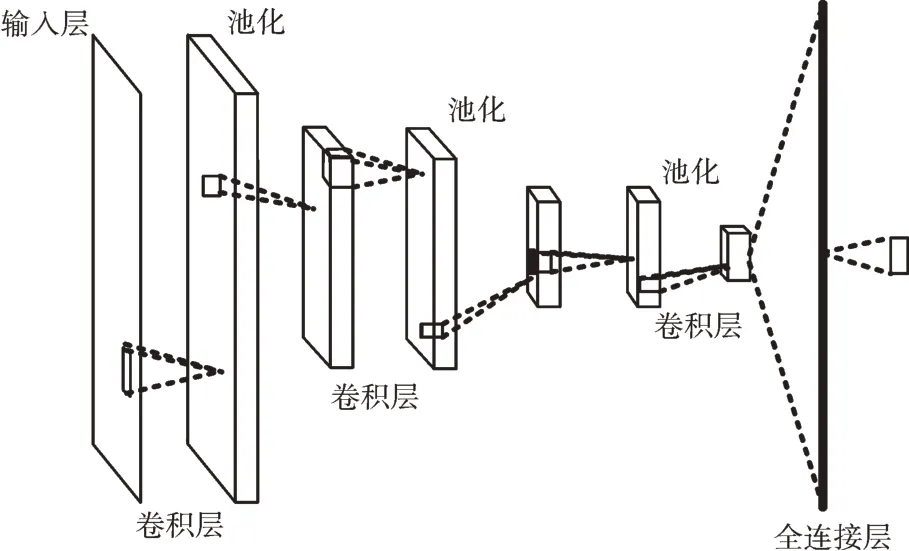
Fig.1 Basic structure of CNN network圖1 CNN 網(wǎng)絡(luò)基本結(jié)構(gòu)
2.1 一維卷積神經(jīng)網(wǎng)絡(luò)
1D CNN 對(duì)于從序列數(shù)據(jù)[20]中提取重要的特征非常有效。一維信號(hào)輸入網(wǎng)絡(luò)模型后,自動(dòng)逐層提取特征,且提取特征的抽象程度逐漸變高,提取的特征經(jīng)過全連接層和輸入層,從而實(shí)現(xiàn)對(duì)一維信號(hào)不同種類的分類。
2.2 二維卷積神經(jīng)網(wǎng)絡(luò)
2D CNN 對(duì)于從二維圖像[21]中提取有用特征很有效,它也可以用來(lái)提取二維信號(hào)結(jié)構(gòu)特征,同樣適用于時(shí)頻圖的特征學(xué)習(xí)和識(shí)別。二維信號(hào)或圖像輸入網(wǎng)絡(luò)模型后,經(jīng)過卷積層、池化層和全連接層后,輸出為不同信號(hào)或圖像的具體分類。
2.3 卷積神經(jīng)網(wǎng)絡(luò)結(jié)構(gòu)
2.3.1 輸入層
卷積神經(jīng)網(wǎng)絡(luò)輸入層可以處理多維數(shù)據(jù)。一維卷積神經(jīng)網(wǎng)絡(luò)的輸入層接收一維或二維數(shù)組,其中一維數(shù)組通常為時(shí)間或頻譜采樣,二維數(shù)組可能包含多個(gè)通道。二維卷積神經(jīng)網(wǎng)絡(luò)的輸入層接收二維或三維數(shù)組。卷積神經(jīng)網(wǎng)絡(luò)的輸入表達(dá)式為:

其中,X為初始輸入數(shù)據(jù),θ(1)、θ(2)、K、θ(L)為學(xué)習(xí)變量參數(shù),即每一級(jí)對(duì)應(yīng)的偏置與權(quán)重,f1、Kf2、fL為每一級(jí)相應(yīng)的函數(shù),每一級(jí)的輸出結(jié)構(gòu)均為特征映射矩陣。
2.3.2 卷積層
卷積層由若干卷積核卷積運(yùn)算得到的特征圖組成,卷積核具有局部感知和參數(shù)共享特性,在學(xué)習(xí)到多種特征表示的同時(shí)能大幅減少模型參數(shù)量。卷積層通過一組核權(quán)重和一個(gè)激活函數(shù)生成一個(gè)輸出特征圖。卷積運(yùn)算可以表示為:

其中,l表示神經(jīng)網(wǎng)絡(luò)的層數(shù)序號(hào),k'為輸出特征映射矩陣的序號(hào),k為輸入特征映射矩陣的序號(hào),分別為第l層中第k'個(gè)神經(jīng)元的輸入和偏置,為第l-1 層中第k'個(gè)神經(jīng)元與第l層中第k個(gè)神經(jīng)元之間的卷積核,為第l-1 層的第k'個(gè)神經(jīng)元的輸出,K 為第l-1 層神經(jīng)元個(gè)數(shù)。
為了增加網(wǎng)絡(luò)的非線性,在每個(gè)卷積操作之后通常還會(huì)應(yīng)用激活函數(shù)。為了有效防止梯度消失和加快網(wǎng)絡(luò)收斂速度,激活函數(shù)采用修正線性單元(rectified linear unit,ReLU),表達(dá)式為:

式(5)中,xijk為第k個(gè)特征映射矩陣的(i,j)元素。
因此卷積層中每個(gè)神經(jīng)元的最終輸出為:

2.3.3 池化層
在每個(gè)卷積層之后都有一個(gè)池化層。池化層是減少輸入特性的水平和垂直空間的操作。池化層根據(jù)輸入數(shù)據(jù)的通道數(shù)產(chǎn)生輸出數(shù)據(jù)。在圖像識(shí)別領(lǐng)域,主要采用最大池化,即取某位置相鄰區(qū)域內(nèi)的最大值作為該位置的最終輸出。最大池化公式為:

其中,p為池化窗口長(zhǎng)度,yi'j'k為池化之前區(qū)域值,yijk為池化處理之后的值。
2.3.4 全連接層
池化層之后是完全連接層。全連通層中的每個(gè)神經(jīng)元都連接到最后一個(gè)池化層中的所有特征映射,提取全連通層中的高級(jí)特征作為輸出層的輸入,然后生成CNN 模型的預(yù)測(cè)輸出。全連接層正向傳播表達(dá)式為:

3 連續(xù)小波變換和雙流CNN 的故障診斷方法
本文所提出的多特征融合CNN 網(wǎng)絡(luò)旋轉(zhuǎn)機(jī)械故障診斷方法流程如下:首先對(duì)傳感器獲得的原始一維振動(dòng)信號(hào)進(jìn)行連續(xù)小波變換(Continuous Wavelet Transform,CWT),得到小波時(shí)頻圖;然后構(gòu)建多特征融合CNN 網(wǎng)絡(luò)模型,將一維旋轉(zhuǎn)機(jī)械振動(dòng)信號(hào)輸入到雙流CNN 的1D CNN 模型中,將得到的小波時(shí)頻圖輸入到雙流CNN 的2D CNN 模型中,分別進(jìn)行卷積層和池化層的特征提取后,拉伸為特征向量;隨后在匯聚層進(jìn)行拼接;最后經(jīng)過全連接層和分類層得到不同旋轉(zhuǎn)機(jī)械故障的具體分類結(jié)果,流程如圖2 所示。
3.1 獲取數(shù)據(jù)集
在數(shù)據(jù)預(yù)處理階段,利用CNN 能夠?qū)崿F(xiàn)多特征融合,即既可將時(shí)域特征作為網(wǎng)絡(luò)輸入,又可將時(shí)頻特征作為網(wǎng)絡(luò)輸入,從而豐富不同維度特征。因此,本文將一維旋轉(zhuǎn)機(jī)械振動(dòng)信號(hào)作為多特征融合CNN 網(wǎng)絡(luò)模型中1D CNN 網(wǎng)絡(luò)模型的輸入,將從連續(xù)小波變換得到的小波時(shí)頻圖作為多特征融合CNN 網(wǎng)絡(luò)模型中2D CNN 網(wǎng)絡(luò)模型的輸入。圖3 為原始振動(dòng)信號(hào)(彩圖掃OSID 碼可見,下同),圖4 為經(jīng)連續(xù)小波變換后得到的小波時(shí)頻圖。

Fig.2 Method flow圖2 方法流程

Fig.3 Original vibration signal圖3 原始振動(dòng)信號(hào)

Fig.4 Wavelet time-frequency圖4 小波時(shí)頻
3.2 多特征融合CNN 網(wǎng)絡(luò)模型訓(xùn)練過程
為了更好地利用一維原始振動(dòng)信號(hào)和二維時(shí)頻圖融合和豐富兩個(gè)不同維度特征,本文充分發(fā)揮CNN 的多特征融合優(yōu)勢(shì),使用多特征融合CNN 網(wǎng)絡(luò)模型作為軸承故障診斷模型,本文多特征融合CNN 網(wǎng)絡(luò)模型結(jié)構(gòu)如圖5 所示。多特征融合CNN 網(wǎng)絡(luò)模型中1D CNN 的輸入是一維數(shù)組,所以在軸承故障診斷中可以直接輸入原始的一維振動(dòng)信號(hào),而2D CNN 輸入的是二維信號(hào)或者圖像,所以需要對(duì)原始信號(hào)做一定的預(yù)處理將其轉(zhuǎn)化為二維信號(hào)或者圖像。
原始的一維旋轉(zhuǎn)機(jī)械振動(dòng)信號(hào)輸入1D CNN 模型,經(jīng)過輸入層、卷積層、池化層、全連接層,得到拉伸后的一組特征向量;同時(shí)將原始的一維旋轉(zhuǎn)機(jī)械振動(dòng)信號(hào)經(jīng)過連續(xù)小波變換后得到的小波時(shí)頻圖輸入2D CNN 模型,同樣經(jīng)過輸入層、卷積層、池化層、卷積、全連接層,得到另一組拉伸后的特征向量。將兩組向量在匯聚層進(jìn)行拼接,再經(jīng)過Dropout 層、全連接層和分類層,最終得到不同旋轉(zhuǎn)機(jī)械故障的分類。
4 實(shí)驗(yàn)與分析
4.1 實(shí)驗(yàn)數(shù)據(jù)
本實(shí)驗(yàn)數(shù)據(jù)集1 來(lái)自凱斯西儲(chǔ)大學(xué)(CWRU)的軸承數(shù)據(jù)庫(kù)。如表1 所示,數(shù)據(jù)的采集頻率為48kHz,數(shù)據(jù)集包含不同的組件故障以及同一類但具有不同嚴(yán)重級(jí)別的故障,共10 種故障類別。其中,正常作為一類特殊的故障類型,其他依次為滾動(dòng)體、內(nèi)圈和外圈,分別為在損傷斑點(diǎn)0.007inches,0.014 inches,0.021 inches 三種直徑下的故障模式。每類故障各有1 000 個(gè)樣本,一共10 000 個(gè)樣本。數(shù)據(jù)集按照7∶2∶1 的比例劃分,即訓(xùn)練集7 000 個(gè),驗(yàn)證集2 000 個(gè),測(cè)試集1 000 個(gè)。
本實(shí)驗(yàn)數(shù)據(jù)集2 來(lái)自機(jī)械故障預(yù)防技術(shù)學(xué)會(huì)(MFPT)的軸承數(shù)據(jù)庫(kù)。如表2 所示,輸入軸速率為25Hz,采樣速率為48 828sps。數(shù)據(jù)集包含不同的組件故障以及同一類但具有不同嚴(yán)重級(jí)別的故障,共14 種故障類別。每類故障各有1 000 個(gè)樣本,一共有14 000 個(gè)樣本。數(shù)據(jù)集按照7∶2∶1 的比例劃分,即訓(xùn)練集9 800 個(gè),驗(yàn)證集2 800 個(gè),測(cè)試集1 400 個(gè)。
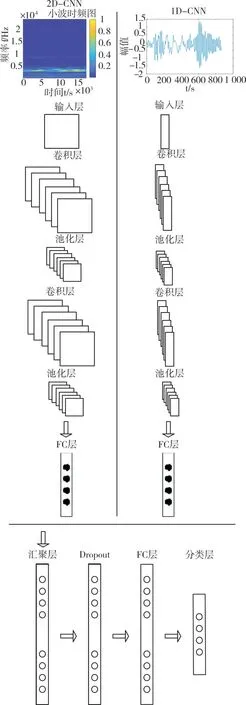
Fig.5 CNN network model structure with multi-feature fusion圖5 多特征融合CNN 網(wǎng)絡(luò)模型結(jié)構(gòu)

Table 1 Experimental data set 1表1 實(shí)驗(yàn)數(shù)據(jù)集1

Table 2 Experimental data set 2表2 實(shí)驗(yàn)數(shù)據(jù)集2
4.2 實(shí)驗(yàn)環(huán)境及模型參數(shù)
本文實(shí)驗(yàn)環(huán)境基于Windows10(64 位),MATLAB R2014b,JetBrains PyCharm 2018.3 x64。
多特征融合CNN 網(wǎng)絡(luò)中1D CNN 網(wǎng)絡(luò)模型各層設(shè)置如表3 所示。模型共有2 個(gè)卷積層,第1 個(gè)卷積層有6 個(gè)卷積核,第2 個(gè)卷積層有16 個(gè)卷積核。多特征融合CNN 網(wǎng)絡(luò)中2D CNN 網(wǎng)絡(luò)模型各層設(shè)置如表4 所示。模型共有2 個(gè)卷積層,第1 個(gè)卷積層有6 個(gè)卷積核,第2 個(gè)卷積層有16 個(gè)卷積核。來(lái)自1D CNN 和2D CNN 模型的兩組不同的一維特征向量,在匯聚層拼接成一個(gè)1×6112 的一維向量,然后經(jīng)過Dropout 的隨機(jī)失活,得到一個(gè)1×84 的一維特征向量,最終通過分類層得到一個(gè)1×10 的一維向量。網(wǎng)絡(luò)采用Relu激活函數(shù),模型的學(xué)習(xí)率為0.005,批處理大小為64,迭代次數(shù)為500 次。

Table 3 1D CNN model parameters表3 1D CNN 模型參數(shù)

Table 4 2D CNN model parameters表4 2D CNN 模型參數(shù)
4.3 實(shí)驗(yàn)過程及結(jié)果分析
為驗(yàn)證本文提出的多特征融合CNN 網(wǎng)絡(luò)模型的故障診斷準(zhǔn)確率,將整個(gè)數(shù)據(jù)集分為訓(xùn)練集、驗(yàn)證集和測(cè)試集。首先,將訓(xùn)練集和驗(yàn)證集訓(xùn)練多特征融合的CNN 網(wǎng)絡(luò)模型,然后將測(cè)試集輸入已訓(xùn)練的多特征融合CNN 網(wǎng)絡(luò)模型中并輸出結(jié)果,得到測(cè)試集的準(zhǔn)確率。
圖6(彩圖掃OSID 碼可見,下同)顯示訓(xùn)練集和驗(yàn)證集的故障分類診斷誤差率。在前100 個(gè)迭代內(nèi),訓(xùn)練集的誤差率和驗(yàn)證集的誤差率下降相對(duì)較快,訓(xùn)練集的誤差率從0.040 左右下降到0.016 左右,驗(yàn)證集的誤差率從0.037 左右下降到0.013 左右。在第100 到200 個(gè)迭代內(nèi),訓(xùn)練集的誤差率和驗(yàn)證集的誤差率相對(duì)前100 個(gè)迭代下降變慢,訓(xùn)練集的誤差率從0.016 左右下降到0.002 左右,驗(yàn)證集的誤差率從0.013 左右下降到0.001 左右;在第200 到300 個(gè)迭代內(nèi),訓(xùn)練集的誤差率和驗(yàn)證集的誤差率下降相對(duì)平緩,訓(xùn)練集的誤差率從0.002 左右下降到接近于0,驗(yàn)證集的誤差率從0.001 左右下降到接近0。此后的迭代中,訓(xùn)練集和驗(yàn)證集的誤差率都恒定在0 左右,表明此時(shí)的學(xué)習(xí)速率已經(jīng)不再適合網(wǎng)絡(luò)參數(shù)的繼續(xù)優(yōu)化,該網(wǎng)絡(luò)模型迅速收斂。

Fig.6 Error rate variation curve圖6 誤差率變化曲線
圖7 為訓(xùn)練集和驗(yàn)證集的故障分類診斷準(zhǔn)確率。在前100 個(gè)迭代內(nèi),訓(xùn)練集的準(zhǔn)確率和驗(yàn)證集的準(zhǔn)確率急速上升且波動(dòng)較大,訓(xùn)練集的準(zhǔn)確率從10%左右上升到83%左右,驗(yàn)證集的準(zhǔn)確率從22%左右上升到82%左右。在第100 到200 個(gè)迭代內(nèi),訓(xùn)練集的準(zhǔn)確率和驗(yàn)證集的準(zhǔn)確率相對(duì)于前100 個(gè)迭代上升變慢,但波動(dòng)依然很大。訓(xùn)練集的準(zhǔn)確率從83%左右上升到99%左右,驗(yàn)證集的準(zhǔn)確率從82%左右上升到97%左右;在第200 到300 個(gè)迭代內(nèi),訓(xùn)練集的準(zhǔn)確率和驗(yàn)證集的準(zhǔn)確率上升相對(duì)平緩,訓(xùn)練集的誤差率從99% 左右上升到接近100%,驗(yàn)證集的準(zhǔn)確率從97%左右上升到接近100%。此后的迭代中,訓(xùn)練集和驗(yàn)證集的準(zhǔn)確率都恒定在100%左右,表明此時(shí)該網(wǎng)絡(luò)模型的故障分類診斷正確率接近100%,網(wǎng)絡(luò)模型已經(jīng)訓(xùn)練完成,同時(shí)也證明了多特征融合CNN 網(wǎng)絡(luò)模型有快速的收斂性和極高的故障診斷分類準(zhǔn)確率。

Fig.7 Accuracy change curve圖7 準(zhǔn)確率變化曲線
4.4 與其他方法對(duì)比分析
為進(jìn)一步驗(yàn)證本文提出的多特征融合CNN 網(wǎng)絡(luò)模型故障診斷的高準(zhǔn)確率,選取離散傅里葉變換+1D CNN[22]和小波時(shí)頻+2D CNN[23]進(jìn)行對(duì)比實(shí)驗(yàn)分析。離散傅里葉變換+1D CNN 是原始時(shí)域振動(dòng)信號(hào)通過離散傅里葉變換后得到的頻域振動(dòng)信號(hào)。用一維卷積神經(jīng)網(wǎng)絡(luò)進(jìn)行訓(xùn)練以達(dá)到軸承故障分類診斷效果。小波時(shí)頻+2D CNN 通過對(duì)軸承的振動(dòng)信號(hào)進(jìn)行連續(xù)小波變換得到小波時(shí)頻圖,將其作為特征圖輸入到二維卷積神經(jīng)網(wǎng)絡(luò)模型中訓(xùn)練以實(shí)現(xiàn)軸承故障分類診斷。分別采用上述3 種方法對(duì)數(shù)據(jù)集進(jìn)行軸承故障分類診斷實(shí)驗(yàn),表5 為各類故障診斷方法在相同數(shù)據(jù)集下的分類準(zhǔn)確率。

Table 5 Fault diagnosis accuracy of different methods表5 不同方法的故障診斷準(zhǔn)確率 (%)
從表5 可以看出,本文提出的多特征融合CNN 網(wǎng)絡(luò)模型故障診斷分類準(zhǔn)確率最終高達(dá)99.78%。與離散傅里葉變換+1D CNN 和小波時(shí)頻+2D CNN 軸承故障診斷模型在相同數(shù)據(jù)集上的準(zhǔn)確率相比,分別提升了9.67%、2.84%。各類方法的故障診斷結(jié)果對(duì)比表明,本文方法的測(cè)試準(zhǔn)確率更高,更適合用于軸承故障診斷和分類。
5 結(jié)語(yǔ)
本文提出了一種多特征融合CNN 網(wǎng)絡(luò)的旋轉(zhuǎn)機(jī)械故障診斷模型,它將一維旋轉(zhuǎn)機(jī)械振動(dòng)信號(hào)、小波時(shí)頻圖和CNN 結(jié)合起來(lái),利用CNN 的多特征融合特點(diǎn)豐富了兩個(gè)不同維度的特征,進(jìn)而提高了旋轉(zhuǎn)機(jī)械故障診斷的準(zhǔn)確率。首先通過連續(xù)小波變換將一維軸承信號(hào)轉(zhuǎn)化為小波時(shí)頻圖,其次構(gòu)建雙流CNN 模型,其中,將一維軸承振動(dòng)信號(hào)作為雙流CNN 的1D CNN 輸入,將小波時(shí)頻圖作為雙流CNN的2D CNN 輸入;然后訓(xùn)練網(wǎng)絡(luò)模型;最后將測(cè)試集輸入已訓(xùn)練的網(wǎng)絡(luò)模型進(jìn)行不同旋轉(zhuǎn)機(jī)械故障的分類。與其他診斷方法相比,本文方法有更高的診斷準(zhǔn)確率和較強(qiáng)的泛化能力,同時(shí)為軸承故障診斷分類提供了新的物理模型思路。但本文的實(shí)驗(yàn)數(shù)據(jù)集都是單個(gè)類型的,而在現(xiàn)實(shí)生產(chǎn)活動(dòng)中旋轉(zhuǎn)機(jī)械的故障往往是多個(gè)故障同時(shí)發(fā)生。因此,復(fù)合故障可以作為后續(xù)研究對(duì)象。此外,對(duì)于診斷模型本身而言,采用何種優(yōu)化方法提高模型訓(xùn)練的收斂速度和效率值得研究。
猜你喜歡
汽車維修與保養(yǎng)(2019年7期)2020-01-06 03:30:42
瘋狂英語(yǔ)·新策略(2019年10期)2019-12-13 08:43:28
當(dāng)代陜西(2019年10期)2019-06-03 10:12:04
數(shù)學(xué)小靈通·3-4年級(jí)(2017年9期)2017-10-13 08:10:54
汽車維護(hù)與修理(2016年10期)2016-07-10 08:17:41
重慶工商大學(xué)學(xué)報(bào)(自然科學(xué)版)(2015年10期)2015-12-28 07:43:58
汽車維修與保養(yǎng)(2015年6期)2015-04-17 03:31:50
汽車維護(hù)與修理(2015年2期)2015-02-28 12:15:39
振動(dòng)、測(cè)試與診斷(2014年5期)2014-03-01 01:14:21
機(jī)械與電子(2014年1期)2014-02-28 02:07:31
