基于CAN FD 總線的動靜態(tài)調(diào)度算法研究
2021-09-28 11:23:36趙雅文周美嬌吳俊鵬
軟件導(dǎo)刊 2021年9期
趙雅文,周美嬌,吳俊鵬
(上海理工大學(xué)光電信息與計算機工程學(xué)院,上海 200093)
0 引言
目前國內(nèi)外主流調(diào)度算法大致分為3 種:①靜態(tài)調(diào)度算法,如固定優(yōu)先級算法(Fixed Priority Schedule Algorithm,F(xiàn)PA)[5];②動態(tài)調(diào)度算法,如最早截止期優(yōu)先算法(Earli?est-Deadline-First,EDF)[6]和最小松弛優(yōu)先算 法(Least-Laxity-First,LLF)[7];③混合調(diào)度算法(Mixed Traffic Sched?uler,MTS)[8]。根據(jù)報文調(diào)度過程中的不同要求,可選擇合適的算法進行調(diào)度。
以上文獻中關(guān)于報文響應(yīng)時間的研究為本文分析CAN FD 報文的最壞響應(yīng)時間奠定了一定基礎(chǔ),但均未將具體的調(diào)度算法應(yīng)用到CAN FD 總線網(wǎng)絡(luò)中進行驗證,以對比不同調(diào)度算法的優(yōu)劣。本文采用固定優(yōu)先級算法和最早截止期優(yōu)先算法對CAN FD 總線報文進行調(diào)度研究,通過CANoe 仿真平臺搭建仿真模型,對兩種算法進行仿真對比實驗。實驗結(jié)果表明,最早截止期優(yōu)先算法對報文的優(yōu)先級分配更加靈活,在低速傳輸情況下,報文可以實現(xiàn)全部傳輸。
1 CAN FD 總線概述
1.1 CAN FD 總線協(xié)議
CAN FD 總線是一種基于CAN2.0 協(xié)議,且與CAN 共享物理層的現(xiàn)場總線,遵循ISO/OSI 網(wǎng)絡(luò)標準模型。其彌補了CAN 總線通信速率低的缺點,同時具有基于事件觸發(fā)、采用短幀格式、遵循非破壞性逐位仲裁規(guī)則等特點。CAN FD 總線采用載波監(jiān)聽多路訪問/沖突避免(Carrier Sense Multiple Access with Collision Avoidance,CSMA/CA)的媒體訪問方式,還可以設(shè)置多種拓撲結(jié)構(gòu),目前在汽車行業(yè)應(yīng)用最多的是總線型拓撲結(jié)構(gòu)。
CAN FD 總線具有3 種報文幀格式,即數(shù)據(jù)幀、出錯幀和超載幀,按照標識符長度又可分為標準幀和擴展幀。CAN FD 數(shù)據(jù)幀相較于CAN 數(shù)據(jù)幀新增了擴展數(shù)據(jù)長度位(EDL 位)、比特率開關(guān)位(BRS 位)和錯誤狀態(tài)指示位(ESI位),同時采用了新的DLC 編碼方式與CRC 算法(CRC 場可擴展至17、21、26 位)。CAN FD 總線以非常高的安全水平支持分布式實時控制,在新一代汽車應(yīng)用中發(fā)揮著重要作用[9]。本文基于具有29 位標識符的擴展數(shù)據(jù)幀進行研究,CAN FD 擴展數(shù)據(jù)幀格式如圖1 所示。
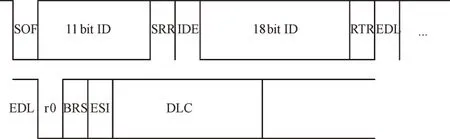
Fig.1 CAN FD extends data frames圖1 CAN FD 擴展數(shù)據(jù)幀
1.2 幀編碼
不歸零(No Return Zero,NRZ)是目前使用較為廣泛的一種編碼方式,CAN FD 總線便是采用該種編碼方式。此外,為避免總線連續(xù)接收到相同的比特位而造成收發(fā)雙方無法同步,在NRZ 編碼時會使用位填充方法對幀起始與CRC 分隔符之間進行編碼,即當(dāng)發(fā)送的比特流中有連續(xù)5位極性相同的比特位出現(xiàn)時,便會在第5 位后插入1 個極性相反的填充進行界定,以預(yù)防突發(fā)錯誤,保證接收方有足夠時間進行同步。
CAN FD 總線在CRC 序列中采用新的位填充規(guī)則[10],即在固定位置插入填充位。具體填充方法為:首先在CRC序列第1 位之前的固定位置填充1 位,然后在CRC 序列每4位后插入1 個填充位,填充位的極性與前1 位相反。接收器在接收到比特流時,應(yīng)主動將填充位從比特流中丟棄以進行CRC 校驗。如果填充位具有與其前1 位相同的極性,則應(yīng)檢測出填充錯誤。CAN FD 總線中CRC 序列的固定填充位數(shù)等于CAN 總線所產(chǎn)生的最大填充位數(shù)。
1.3 標識符編碼
在總線通信過程中,需要對報文標識符進行編碼設(shè)計以保證CAN FD 總線通信的實時性,該步驟是應(yīng)用層協(xié)議與應(yīng)用系統(tǒng)設(shè)計的重要內(nèi)容之一。報文標識符的作用主要體現(xiàn)在兩方面:一是在接收時過濾報文,二是定義報文分配優(yōu)先級,用于總線競爭。CAN FD 報文標識符的編碼設(shè)計需遵循以下原則[11]:①每個報文的標識符是唯一的;②預(yù)留的節(jié)點設(shè)備應(yīng)能滿足總線上的最大節(jié)點個數(shù),報文空間也要能容納相應(yīng)節(jié)點內(nèi)的報文個數(shù);③編碼方式應(yīng)簡單實用;④編碼后的標識符能夠與應(yīng)用層協(xié)議相兼容;⑤優(yōu)先級越高的報文標識符值越小;⑥遵從CAN2.0A 和CAN2.0B 規(guī)范,7 個最高位必須不能全都是1。
本文研究對象是具有29 位標識符的擴展CAN FD 數(shù)據(jù)幀,分別對擴展幀的高11 位以及低18 位進行編碼配置(見圖2),具體方案設(shè)計如下:
基于對亞洲航線郵輪通關(guān)相關(guān)的現(xiàn)狀分析、政策及制度總結(jié)、模型構(gòu)建以及歸納整理,給出以下七點我國航線郵輪運營便利化建議如下:

Fig.2 CAN FD identifier encoding圖2 CAN FD 標識符編碼
首先,對可變優(yōu)先級的高11 位標識符進行配置。預(yù)留最高兩位標識符用于判斷報文類型,同時要滿足高7 位不能全為1 的設(shè)計規(guī)則。本文假設(shè)00 表示強實時報文,01 表示弱實時報文,10 表示非實時報文。第26 至18 位用于表示報文的優(yōu)先級提升段,根據(jù)報文的截止時間采用動態(tài)編碼方式進行配置。
其次,標識符的第17 至13 位用于表示節(jié)點號,第12 至9 位用于表示報文號,余下6 位用于表示目的地址,最后3位作為保留位,至此完成標識符編碼。
1.4 最壞響應(yīng)時間
由于多個節(jié)點的存在,單路CAN FD 總線在報文傳輸過程中遇到節(jié)點同時訪問總線時,會不可避免地發(fā)生沖突。此時報文傳輸需要根據(jù)自身優(yōu)先級競爭總線,獲得總線使用權(quán),因此會導(dǎo)致報文延遲傳送。CAN FD 總線的報文傳輸延時主要受4 個方面影響:報文幀、控制器、軟件與媒體訪問[12]。由于控制器和軟件造成的延時微乎其微,可以不用在報文響應(yīng)時間中體現(xiàn),因此本文主要分析幀延時與媒體訪問延時。
幀延時即報文的傳輸延遲,是一種由信息串行化導(dǎo)致的延時,時延長度由幀長度和總線傳輸速率決定,其中幀延時=幀長度/波特率[13]。這種延時在傳輸少量報文時對報文的最壞響應(yīng)時間影響最大。媒體訪問延時分為兩種情況,一是總線在使用中且仍要被占用的時間,另一種是總線被高優(yōu)先級報文占用,低優(yōu)先級報文等待釋放的時間,即排隊延遲。
對于擴展幀格式的CAN FD 報文,其最壞情況響應(yīng)時間主要針對傳輸時遇到位填充的場景。最壞情況下即按照位填充的規(guī)則,每4 位后填充1 位,直至CRC 分隔符。長度為p 個字節(jié)的報文幀的最壞響應(yīng)時間為:

其中,τcan為CAN 總線的位傳輸速率,τfd為CAN FD 總線的位傳輸速率。
2 FPS 調(diào)度與EDF調(diào)度
固定優(yōu)先級調(diào)度算法(Fixed Priority Scheduling,F(xiàn)PS)由靜態(tài)調(diào)度算法演變而來[14],是總線調(diào)度時經(jīng)常用到的一種算法。該算法根據(jù)報文周期或截止期,在報文調(diào)度前分配好優(yōu)先級,保證按照優(yōu)先級進行調(diào)度。應(yīng)用較多的固定優(yōu)先級算法為單調(diào)速率算法(Rate Monotonic Scheduling,RMS)[15]和截止期單調(diào)算法(Deadline Monotonic Schedul?ing,DMS)[16]兩種,具有額外開銷小和實現(xiàn)簡單的優(yōu)點,但存在對事件觸發(fā)的報文處理不靈活、容錯能力差的缺點[17]。
最早截止期優(yōu)先調(diào)度算法(Earliest-Deadline-First,EDF)根據(jù)報文的絕對截止時間動態(tài)分配優(yōu)先級,絕對截止時間越小則分配優(yōu)先級越高,該算法目前較為常用[18]。EDF 調(diào)度算法在報文調(diào)度時能實時計算報文優(yōu)先級,滿足系統(tǒng)對信息傳遞的實時性要求。
EDF 是一種動態(tài)搶占式調(diào)度算法[19],其報文優(yōu)先級計算方式是對報文截止時間進行編碼,采用不同編碼方式得出的計算結(jié)果會有所不同,通常采用以下平均分區(qū)編碼方式。
對于一組報文{m1,m2,m3,…,mn},假設(shè)它們的相對截止時間從小到大依次排列為{d1,d2,d3,…,dmax},以報文的最大相對截止時間dmax為上限將時間軸均分成k段,則每段區(qū)間長為dmax/k。平均分區(qū)情況如圖3 所示。

Fig.3 Schematic diagram of mean zoning圖3 平均分區(qū)示意圖
3 實驗仿真
3.1 仿真模型
本文采用實驗對比分析CAN FD 網(wǎng)絡(luò)在FPS 算法和EDF 算法下的調(diào)度效果。通過CANoe 軟件搭建CAN FD 網(wǎng)絡(luò)模型[20],由4 個節(jié)點組成,分別為電池管理節(jié)點(BCM)、網(wǎng)關(guān)節(jié)點(Gateway)、儀表節(jié)點(IPC)以及開關(guān)節(jié)點(Switch),均在1 條CAN FD 總線上,具體如圖4 所示。
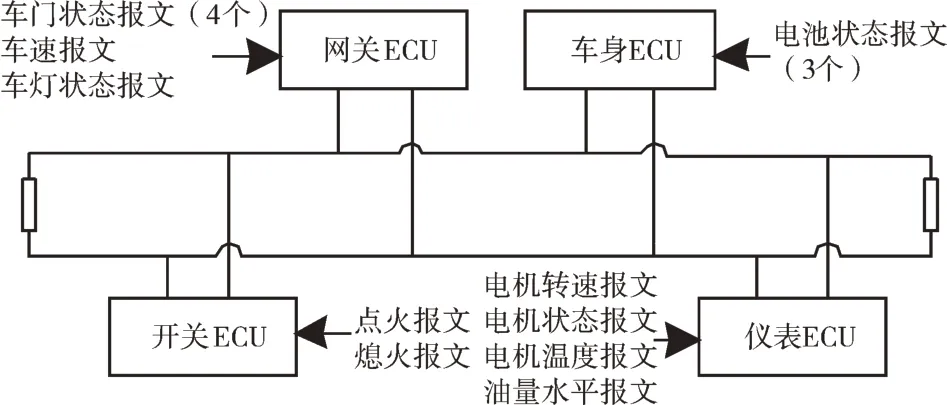
Fig.4 CAN FD system network planning圖4 CAN FD 系統(tǒng)網(wǎng)絡(luò)規(guī)劃
各個節(jié)點根據(jù)功能不同共傳遞15 個報文。電池管理節(jié)點包含3 個電池狀態(tài)報文,均為周期性報文。網(wǎng)關(guān)節(jié)點包含前后左右車門狀態(tài)4 個報文以及車燈、車速2 個周期性報文。儀表節(jié)點包含引擎轉(zhuǎn)速、溫度、油量以及引擎錯誤狀態(tài)4 個周期性報文。在仿真周期性報文時只考慮其最壞相應(yīng)傳輸時間,開關(guān)節(jié)點只收發(fā)開和關(guān)2 個非周期性報文。所有周期性報文數(shù)據(jù)長度均設(shè)置為8 字節(jié),非周期性報文數(shù)據(jù)長度為1 字節(jié)。具體報文參數(shù)如表1 所示。
3.2 實驗結(jié)果
根據(jù)報文參數(shù)構(gòu)造仿真數(shù)據(jù)庫中的報文與信號,編寫CAPL(CAN Access Programming Language)腳本,在傳輸速率為250Kbit/s 和500Kbit/s 的情況下分別進行仿真實驗。FPS 算法下報文實際傳輸結(jié)果如表2 所示,EDF 算法下報文實際傳輸結(jié)果如表3 所示。
從表2、表3 結(jié)果可以看出,當(dāng)采用FPS 算法進行調(diào)度時,Vehicle 類報文由于事先分配的報文優(yōu)先級較低,在優(yōu)先級仲裁獲取總線訪問權(quán)時一直失敗,無法占用CAN FD總線,最終導(dǎo)致發(fā)送失敗,錯過報文截止期。而當(dāng)采用EDF調(diào)度算法時,所有報文都可以被合理地安排優(yōu)先級,可占用總線且均能在截止期前正確發(fā)出,滿足了報文的實時性要求。電池管理節(jié)點與儀表節(jié)點報文傳送結(jié)果與實時顯示如圖5 所示,網(wǎng)關(guān)節(jié)點與開關(guān)節(jié)點報文傳送結(jié)果如圖6所示。
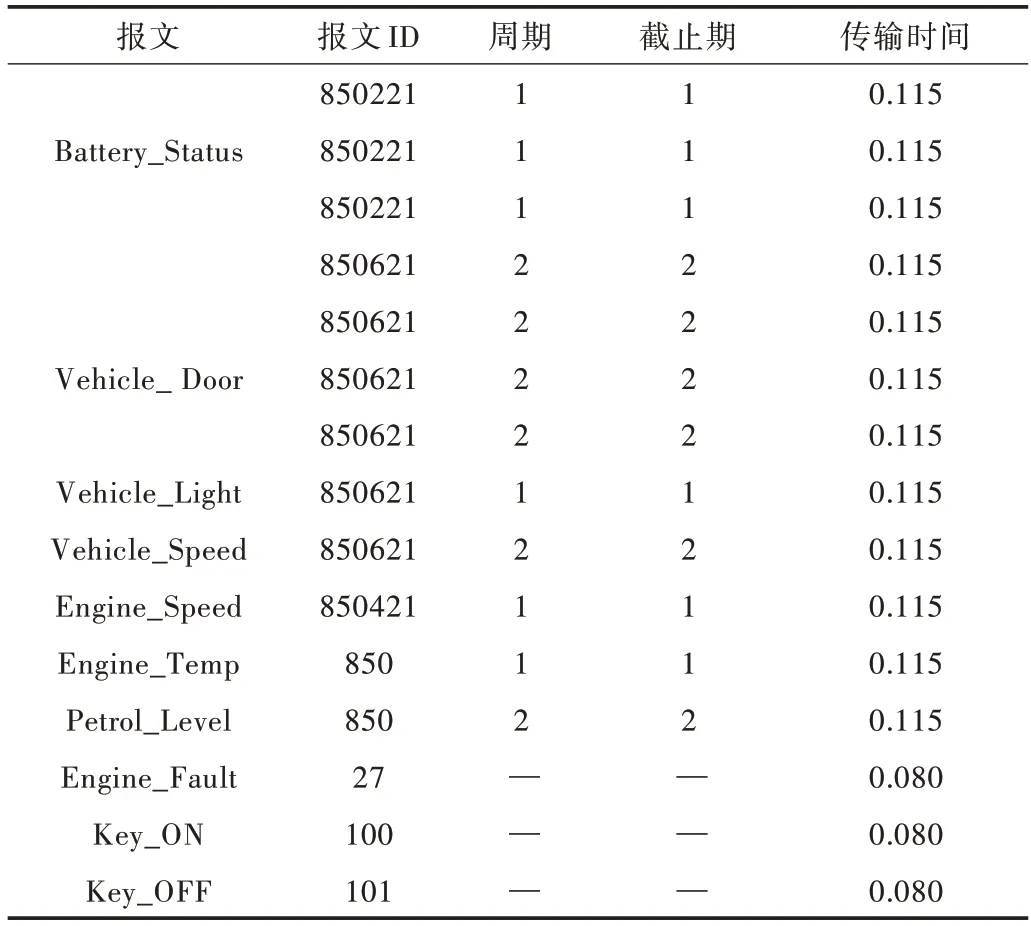
Table 1 Message parameters表1 報文參數(shù)單位:ms
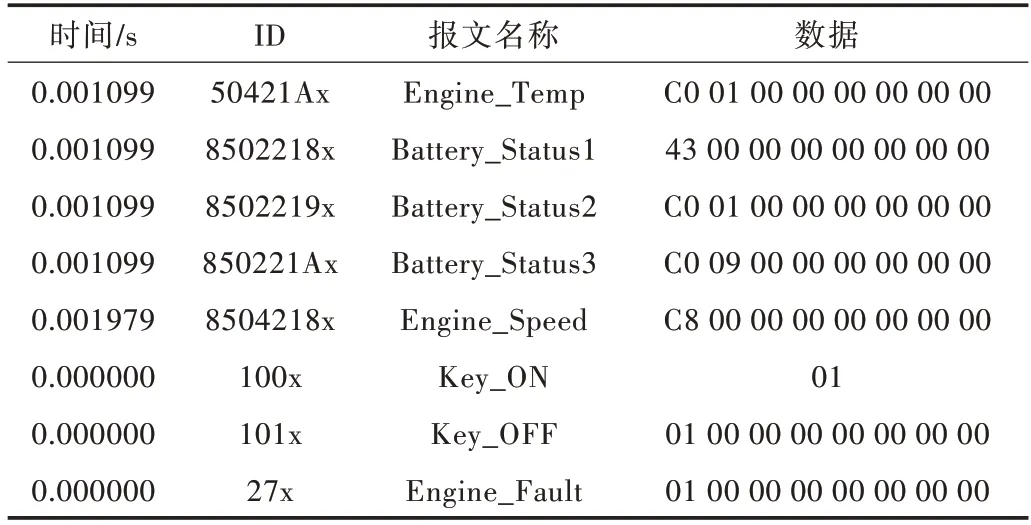
Table 2 Message transmission results of FPS algorithm表2 FPS 算法下報文傳輸結(jié)果

Table 3 Message transmission results of EDF algorithm表3 EDF 算法下報文傳輸結(jié)果
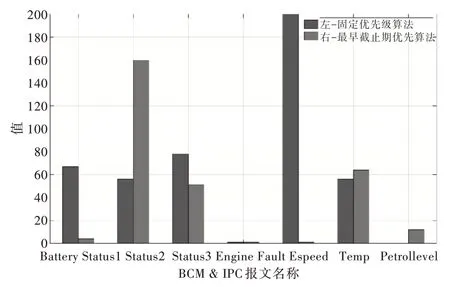
Fig.5 Message scheduling results of BCM and IPC圖5 電池管理節(jié)點與儀表節(jié)點報文調(diào)度結(jié)果
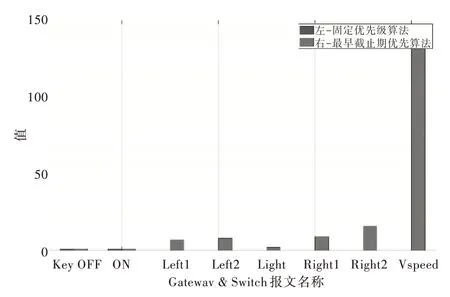
Fig.6 Message scheduling results of Gateway and Switch圖6 網(wǎng)關(guān)節(jié)點與開關(guān)節(jié)點報文結(jié)果
由圖中可知,在CAN FD 總線系統(tǒng)中,相較于靜態(tài)調(diào)度算法FPS,采用動態(tài)調(diào)度算法EDF 進行調(diào)度時靈活性更高,能夠使報文在截止期前發(fā)出,保證報文傳送實時性。
4 結(jié)語
本文以CAN FD 總線傳輸理論為基礎(chǔ),分析了報文傳輸時的最壞響應(yīng)時間。通過CANoe 仿真平臺,分別對FPS算法和EDF 算法在波特率為250Kbit/s 和500Kbit/s 的情況下進行多次仿真實驗。結(jié)果顯示,采用FPS 算法時15 個報文最佳情況下只能正常傳送8 個(53%),而采用EDF 算法可以確保15 個報文100%傳輸。相較于FPS 算法,EDF 算法在報文優(yōu)先級分配時更加靈活有效,能夠避免因錯過報文截止期而無法進行調(diào)度的情況。此外,CAN FD 總線因具有數(shù)據(jù)傳輸速率快、總線利用率高等優(yōu)點,非常適合當(dāng)今智能汽車產(chǎn)業(yè)需傳輸大量信號的要求。然而,本文仿真實驗是建立在比較理想的條件上,缺乏硬件節(jié)點的實際驗證,今后需加深該方面研究。
