基于CNN的機載氣象雷達氣象目標檢測方法
2021-10-08 04:51:58喻慶豪朱岱寅
雷達科學與技術 2021年4期
喻慶豪, 吳 迪, 朱岱寅, 錢 君
(1. 南京航空航天大學電子信息工程學院雷達成像與微波光子技術教育部重點實驗室, 江蘇南京 211106;2. 中國航空工業集團公司雷華電子技術研究所, 江蘇無錫 214063)
0 引言
機載氣象雷達是一種實時預報降水量的遙感設備。實際應用中,雷達一般工作在下視模式。當雷達天線方向圖主瓣或旁瓣照射到地面時,來自地面物體的散射回波往往會湮沒氣象目標信號,嚴重影響氣象參數的準確估計,從而惡化機載氣象雷達的工作性能[1]。回波中的強地雜波背景在目標檢測過程中會產生大量的虛警,增加了氣象目標檢測的難度[2]。因此氣象目標的識別是必不可少的。
解決氣象目標檢測問題,通常需要以下兩個過程[3]:1) 結合時域、多普勒域和俯仰維空域的相關信息,計算可區分氣象目標與地雜波的判別函數;2) 根據判別函數設計性能較優的分類器,實現氣象目標檢測。目前已有文獻利用地雜波和氣象目標在譜矩信息方面的差異,設計了針對地基氣象雷達的目標檢測函數。由于靜止地物目標后向散射回波在慢時間域的相位具有低可變性[4],雜波相位對準(Clutter Phase Alignment, CPA)技術利用此特性實現對氣象目標的判別。相位起伏指標(Phase Fluctuation Index,PFI)和相位結構函數(Phase Structure Function,PSF)根據相鄰采樣脈沖間相位的變化快慢程度區分地雜波和氣象目標。與固定地雜波相比,氣象目標回波的相位變化更快[1,5]。譜雜波識別(Spectrum Clutter Identification,SCI)算法利用四種判別函數,即譜功率分布(Spectral Power Distribution, SPD)、譜相位起伏(Spectrum Phase Fluctuation, SPF)、功率紋理(Power Texture, PT)和譜寬紋理(Spectrum Width Texture, SWT),結合時域和頻域信息實現對地雜波和氣象目標的判別[6-8]。
除判別函數外,分類器的設計也是一項重要的工作。一般來說,模糊邏輯方法定義了極化變量和特定類型的水凝物之間的非線性關系,利用此非線性關系實現水凝物分類[9-12]。然而,模糊邏輯方法的檢測性能并不穩定。此外,貝葉斯分類器、K近鄰(K-Nearest Neighbor, KNN)算法,支持向量機(Support Vector Machine, SVM)和CNN同樣可應用于氣象目標檢測中[1,5,13-18],而且國內外學者已經證明以上分類網絡在圖像識別和圖像分類等方面具有明顯的效果[3,19-22]。
本文提出了一種基于CNN的氣象目標檢測方法。該方法利用垂直陣列系統獲取氣象目標的俯仰維信息,并根據雙通道雷達回波數據計算干涉相位。然后將CPA、多普勒速度和干涉相位作為三種判別函數一同輸入到分類器中,進而得到最終的檢測結果。仿真結果表明,該方法比傳統的判別函數方法具有更好的檢測性能,而且CNN比傳統的分類器具有更好的魯棒性。
1 基于CNN的氣象目標檢測方法
本文方法的整體處理流程如圖1所示。本文選用CPA、多普勒速度和補償后的干涉相位作為判別函數,在進行氣象目標檢測前,應先設計合適的CNN分類器,即設計CNN的網絡結構,并使用合適的數據作為訓練集數據對CNN進行訓練至模型收斂,并能在驗證集數據中有理想的準確率和損失結果。
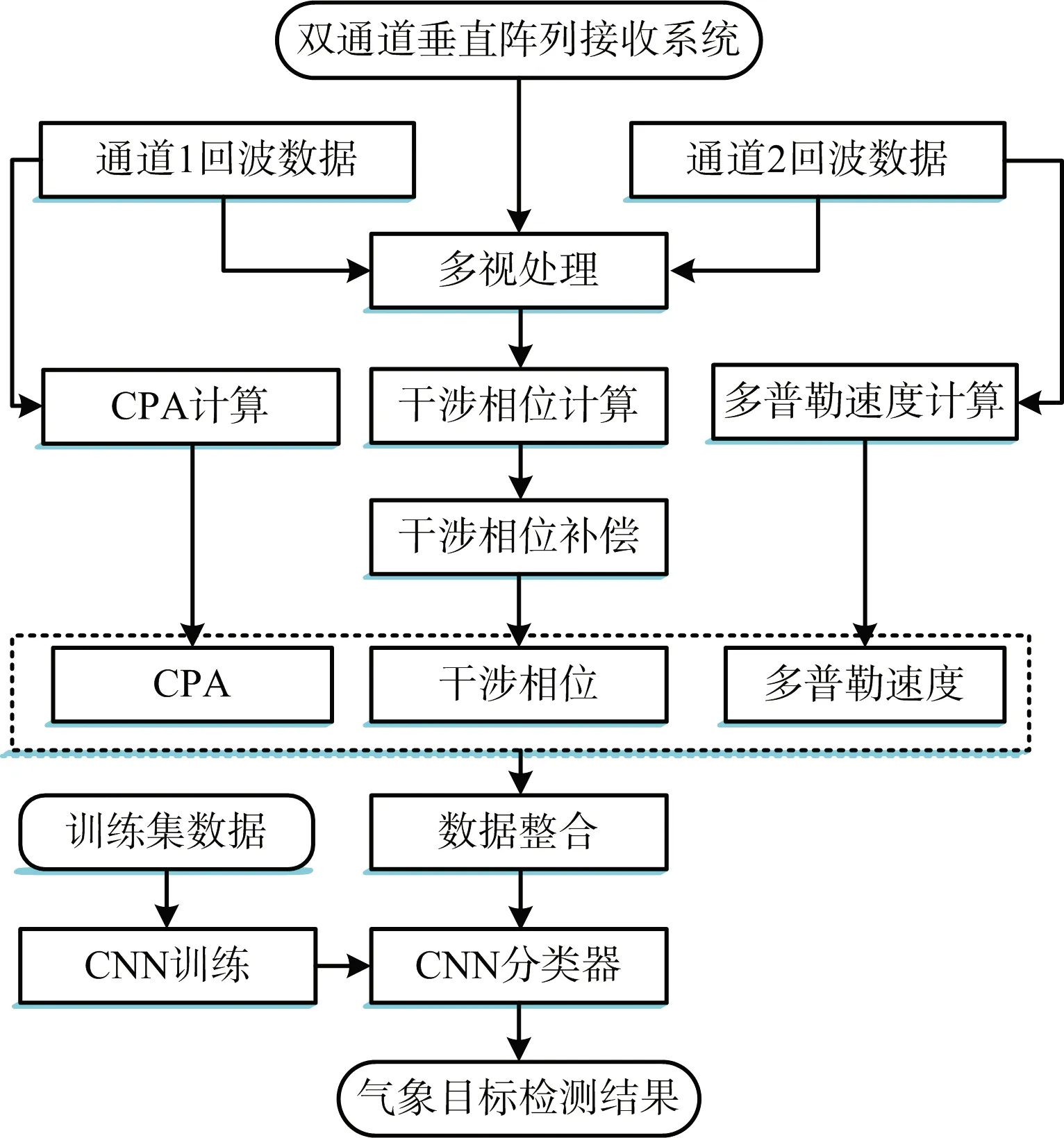
圖1 基于CNN的氣象目標檢測方法流程圖
在氣象目標檢測時,首先通過垂直陣列接收雙通道雷達原始數據,通過多視處理和干涉相位補償得到待檢測的干涉相位數據,并根據回波計算CPA和多普勒速度。并將上述三種指標作為判別函數,并整合成適合CNN輸入的數據形式,再輸入到訓練好的CNN中即可得到氣象目標的檢測結果。
2 判別函數的選擇
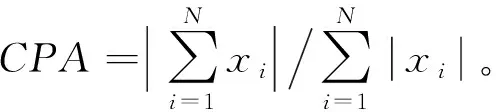
2.1 CPA
2.2 多普勒速度
本節利用脈沖對處理法(Pulse Pair Processing, PPP)通過回波提取多普勒速度信息。脈沖對處理法不需要知道整個多普勒功率譜的詳細結構,在時域直接計算得到譜的統計特征值。
設回波幅度的復振幅為S(t)=I(t)+jQ(t),I(t)、Q(t)分別為S(t)的實部和虛部。回波信號中取樣樣本數為N,則樣本自相關函數為

j(Qi+1Ii-Ii+1Qi)]
(1)
脈沖重復間隔為Tr的相繼兩個回波信號的相位差為
(2)
式中,arctan{·}是反正切函數算子。因此多普勒平均頻率可估計為
(3)
地雜波分量的多普勒速度在0 m/s附近;而氣象目標通常被認為是緩慢移動的目標,因此氣象目標具有非零多普勒速度特性。因此多普勒速度有能力檢測出地雜波中的氣象目標。
2.3 干涉相位
與CPA和多普勒速度兩種判別函數不同,干涉相位是一種基于俯仰空域的氣象目標檢測函數。為獲取氣象目標的空間高度信息,本文采用俯仰雙通道系統采集雷達回波數據, 對應的二維空間幾何接收模型如圖2所示。在俯仰通道接收模式下,干涉相位與下視角(即空間位置)有關。因此,在干涉相位圖中,由于地雜波和氣象目標高度不同,二者對應的干涉相位值也會存在差異,因此可利用干涉相位區分氣象信號分量和地雜波分量。
圖2 二維空間幾何接收模型
本文選擇線性調頻信號(LFM)作為發射信號采集雷達數據,散射點P接收的回波信號經解調后如下所示:
exp{jπk(τ-rs(t)/c)2}·
exp{-j2πfc·(rs(t)/c)}+n(t,τ)
(4)
式中,k為線性調頻信號的線性調頻率,Tr為脈沖持續時間,c為電磁波傳播速度,η為信號幅度,rs(t)/c表示電磁波從發射機傳播到點P再由點P反射回接收機的總時間。為了簡化分析,將忽略信號中的干擾成分n(t,τ)。則經過距離向脈沖壓縮的信號為
(5)
式中,sinc{x}=sin(πx)/(πx),其中第1部分為脈沖壓縮后信號幅度,對于兩個不同的接收機R1,R2,rs(t)可以被表示為
(6)
一般來說,雙通道系統的回波信號是相同的,但在式(5)第2部分中的相位有所不同。因此兩通道的相位差可以表示為

(2π/λ)·dsinθ0
(7)
式中,d表示陣元間距,θ0表示P點處的入射角。則對于地雜波的干涉相位可以表示為
φA1A2_C=(2π/λ)·dsinθc
(8)
需要注意的是,在實際應用中,氣象信號在空間高度上的分布是不規則的,這就導致了入射角的變化。也就是說,氣象回波是由多個入射角的回波疊加而成。由氣象信號得到的干涉相位與天線方向圖和氣象場景的反射率因子有關。為了簡化分析,在圖2中假設氣象回波數據來自恒定入射角。因此,純氣象信號的干涉相位計算如下:
φA1A2_W=(2π/λ)·dsinθw
(9)
根據圖2中幾何關系可知,設φA1A2_W+C為氣象目標和地雜波的混合信號,則同一距離門內氣象目標和地雜波混合信號的干涉相位取值范圍是
(2π/λ)·dsinθw<φA1A2_W+C≤
(2π/λ)·dsinθc
(10)
對于垂直陣列系統,干涉相位與方位角無關。因此,在相同距離處,干涉相位在方位角上保持不變。干涉相位提供了判別哪些區域可能包含天氣信號的信息。設雙通道系統中和通道接收信號為SS,差通道的接收信號是SD,則待檢測的干涉相位圖可計算為
InP=arg{[SD+SS]·[SD-SS]*}
(11)
式中,[·]*為共軛算子,arg{·}表示相位運算符。對地雜波而言,探測距離的變化會引起下視角的變化,進而影響雜波的干涉相位值。因此需要逐距離門對由距離變化引起的固有相位差進行干涉相位補償才可得到待檢測的干涉相位值。假設探測距離為R,載機飛行高度為H,在此距離門處地面目標對應的下視角為θc,且sinθc≈H/R,因此干涉相位的補償量為
PC=2πdH/Rλ
(12)
經過干涉相位補償后,地雜波分量的干涉相位值會趨近于0,而混合信號的干涉相位值應偏離0。干涉相位利用氣象目標和地雜波的空間高度信息不同來檢測氣象目標,可有效避免低脈沖重復頻率(Pulse Repetition Frequency,PRF)對多普勒頻譜展寬和多普勒模糊的影響。因此,根據補償后的干涉相位,可利用俯仰空域信息實現氣象目標檢測。
3 CNN分類器設計
近年來,GPU計算能力的大幅度提升以及神經網絡軟件搭建網絡框架的極大便利性,使得CNN在學術界和工業界越來越受青睞,CNN被廣泛應用于圖像分類,人臉識別等多個領域。因此,鑒于CNN強大的分類能力,本文利用此網絡處理氣象回波數據,實現對氣象目標的檢測。
本文將雷達回波數據預先處理成三種判別函數的形式,根據到CNN的卷積計算原理,將三種判別函數整合成一個三維數組。在處理過程中,CNN被視為滑動窗口檢測器,需要在數據中逐像素點滑動并輸出判斷結果。將CNN的輸入數據的大小設置為3×32×32,因此每個待檢測像素點的最終檢測結果取決于待測單元周圍3×32×32的三維數據在CNN中的輸出。
訓練CNN網絡,需要生成或是找到合適的數據作為訓練集。訓練集的原始數據需要先通過計算得到三種判別函數,并將其整合成三維數據,然后分成若干組3×32×32大小的數據,最后根據先驗信息將這些數據分別賦予地雜波和氣象目標的標簽。為了防止每組數據主要由噪聲像素點組成,用時為了使CNN有足夠且有效的樣本進行訓練,這里選用至少一半像素點為氣象或是地雜波的數據,而且為了使樣本的選取更具有代表性,選擇像素點的原始數據的幅度不應該太低。
利用CNN可以詳細分析出所選的三種判別函數和兩種回波數據之間的非線性關系。本文所設計的CNN模型的網絡結構如表1所示,它由5個卷積層(Convolutional Layer),1個全連接層(Fully Connected Layers, FC)和2個最大池化層(Max-pooling Layer)組成,此網絡選擇線性整流函數(Rectified Linear Unit, ReLU)作為激活函數,同時為了改善流經網絡的梯度,提高訓練速度,在網絡中設置批量歸一化(Batch Normalization,BN)。將三維輸入數據輸入到網絡中,通過每一層網絡的處理和計算,最后通過Softmax函數計算氣象目標和地雜波被取到的概率并與檢測門限比較,輸出最終檢測結果。
表1 CNN結構及屬性
4 實驗結果與分析
本節利用仿真數據驗證所提出方法的有效性,為此生成兩組機載雷達仿真數據,主要參數見表2。為了訓練前一節中設計的CNN,首先利用第一組數據作為訓練集數據,使用該數據分別計算出CPA,多普勒速度和補償后的干涉相位,并將三種判別函數的計算結果整理成三維數據的形式。
表2 仿真數據和實測數據對應的主要參數
為了證明這三種判別函數的特征選取是有效的,如圖3所示,對訓練集數據中的CPA、干涉相位和多普勒速度三維數據進行特征分類空間描述,圖中,藍色散點和紅色散點的位置分別代表地雜波與氣象目標對應的判別函數值在該三維空間中的分布情況。從圖中可以看出,地雜波和氣象目標對應的兩種點跡在CPA-多普勒速度-補償后的干涉相位構成的三維空間中有明顯的界限,這可說明特征選取的有效性和正確性。
圖3 地雜波與氣象目標在三種判別函數空間中的分布
利用上一節提到的數據存儲方式,從此三維數據中提取10 000組3×32×32大小的數據,標記為氣象目標,同時提取10 000組數據標記為地雜波。然后從上述20 000組數據中隨機選取14 000組作為訓練集數據來訓練CNN,余下6 000組數據作為驗證集,以觀察訓練過程中準確率曲線和損失曲線的變化情況。訓練過程中采用具有動量隨機梯度下降法(Stochastic Gradient Descent with Momentum, SGDM)訓練設計的網絡,將epochs設置為15,學習率(Learning Rate)設置為0.01。經過訓練,檢測驗證集的準確率可以達到99.60%,檢測驗證集的損失降低至0.021,此時額外的訓練不會改進模型,CNN模型達到收斂狀態。
訓練好CNN后,就可以用CNN進行氣象目標檢測,圖4給出了在測試集中三種判別函數的計算結果以及氣象目標的真值圖,真值圖中,“1”表示含有氣象目標分量的像素點,“0”表示只有地雜波分量的像素點。由于飛機運動帶來的多普勒頻移使得CPA和多普勒速度在數值上與理論值存在偏差,而在CNN的作用下測試中平臺速度對分類結果的影響可忽略,不需要補償多普勒信息,直接對原始回波進行分析即可。
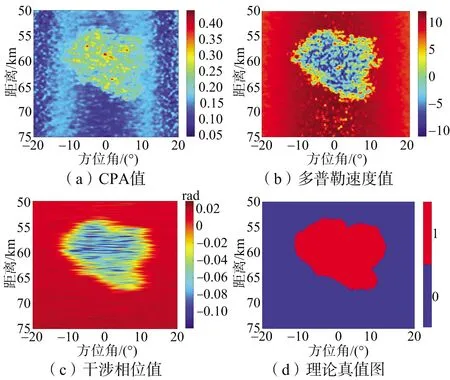
圖4 三種判別函數的計算結果及理論真值圖
為了更直觀地反映本文方法的檢測性能,將正確分類為氣象目標的像素點標記為TP,將錯誤分類為氣象目標的像素點標記為FP。類似地,將正確分類為地雜波的像素標記為TN,錯誤分類為地雜波的像素標記為FN。在圖5中,在信雜比為5 dB的情況下,將該方法檢測結果與CPA、多普勒速度和PFI三種氣象目標檢測方法的檢測結果進行比較。如圖5所示,雖然本文提出的方法在信噪比較低的區域仍然有一些被誤判為FP和FN的像素點,但具有最好的檢測性能。由于飛機的運動,使得原始回波數據中的多普勒信息惡化。依賴于多普勒信息的CPA,多普勒速度和PFI等檢測方法的性能明顯較差。然而,本文提出的方法結合了多普勒域和空域的信息,在譜矩信息惡化的情況下仍可獲得較好的性能。
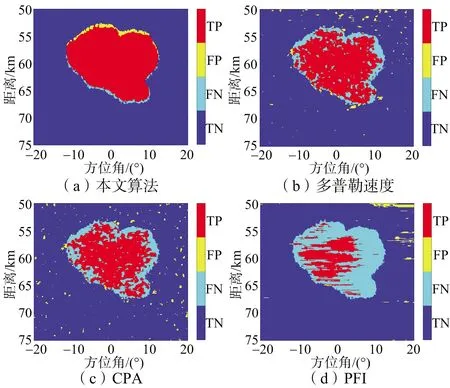
圖5 利用不同方法得到的氣象目標檢測結果
進一步地,利用檢測概率和虛警概率定量分析幾種方法的性能,檢測概率和虛警概率分別定義為
(13)
圖6給出了在Pfa=0.001 4時,不同檢測方法對應的檢測概率隨信雜比的變化關系。結果表明,相比于其他方法,所提方法在檢測概率方面具有更優的性能。
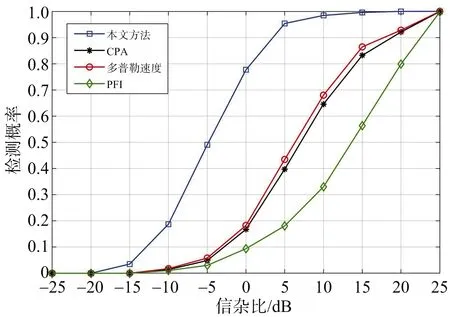
圖6 不同信雜比下各種檢測方法對應的檢測性能曲線
此外,為了驗證譜矩特性對各種方法檢測性能的影響,在合理情況下,設定信雜比為5 dB,分別改變地雜波的譜寬和氣象目標的多普勒頻移,得到圖7和圖8對應的檢測概率曲線。可見,由于譜寬的增加,基于多普勒信息的氣象目標檢測方法的性能有所下降,而本文方法結合了多普勒信息和空域信息,有效降低了由譜寬增加帶來的檢測性能的惡化。而多普勒頻移較低時,幾種基于多普勒信息的檢測方法的檢測概率都不是非常理想,但本文方法在多普勒頻移較低時,能夠有比較高的檢測概率;且在多普勒頻移比較高時,本文方法的檢測概率仍比另外幾種算法更高,突出了本文方法的優越性。
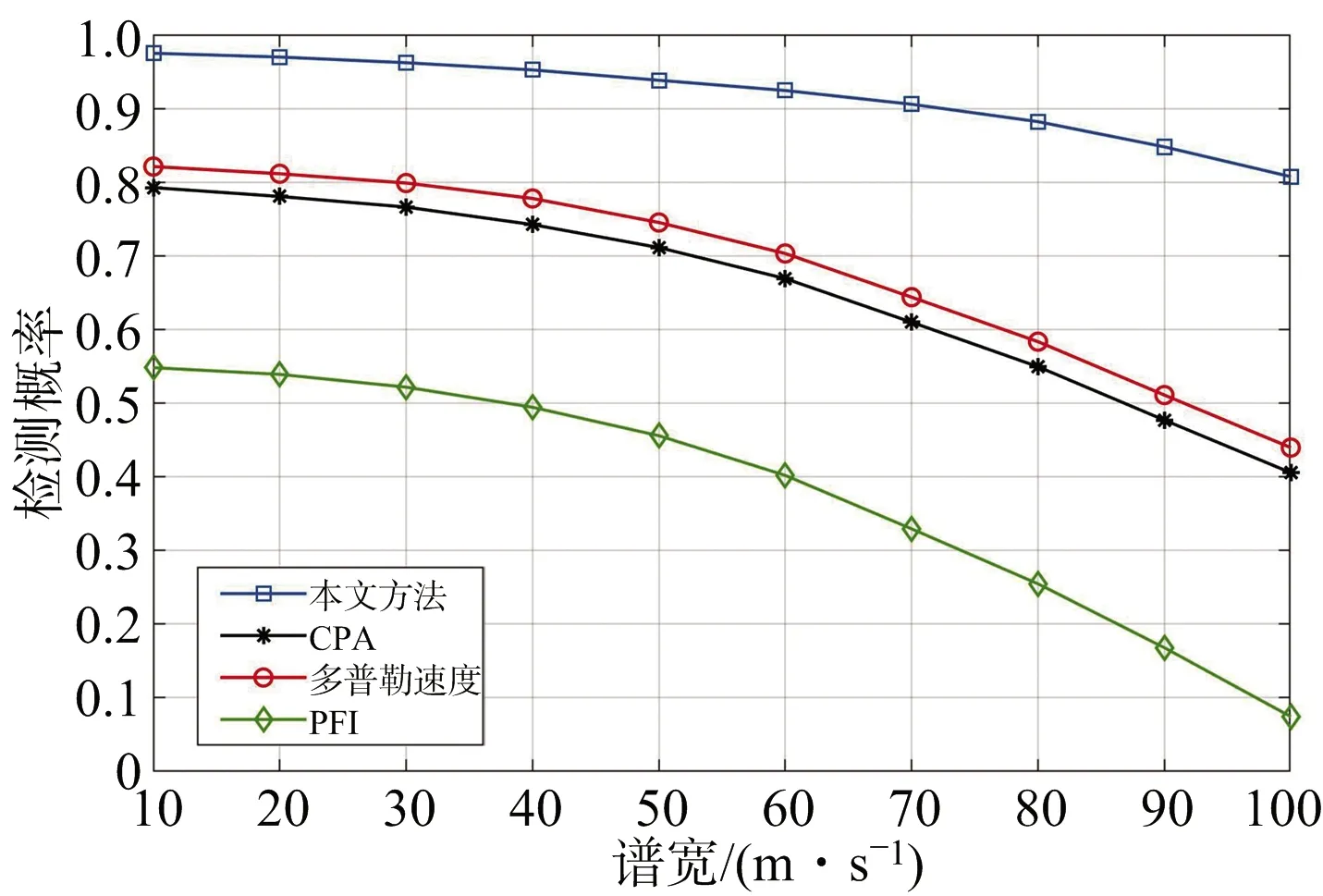
圖7 不同地雜波譜寬下各種檢測方法對應的檢測性能曲線
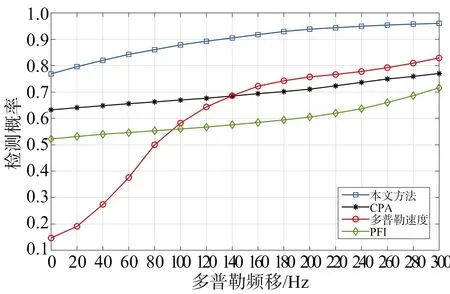
圖8 不同氣象目標多普勒頻移下各種檢測方法對應的檢測性能曲線
為了突出CNN的優越性,使用相同的訓練數據集來訓練貝葉斯分類器和支持向量機,并用訓練好的貝葉斯分類器和支持向量機對圖5中涉及到的測試數據集進行了處理,檢測結果如圖9所示。結合圖9和圖5(a)的檢測結果,可以看出,兩種常規分類方法的檢測結果中存在較多的FP和FN像素點。因此,采用CNN作為氣象目標的分類器是一種較好的選擇。
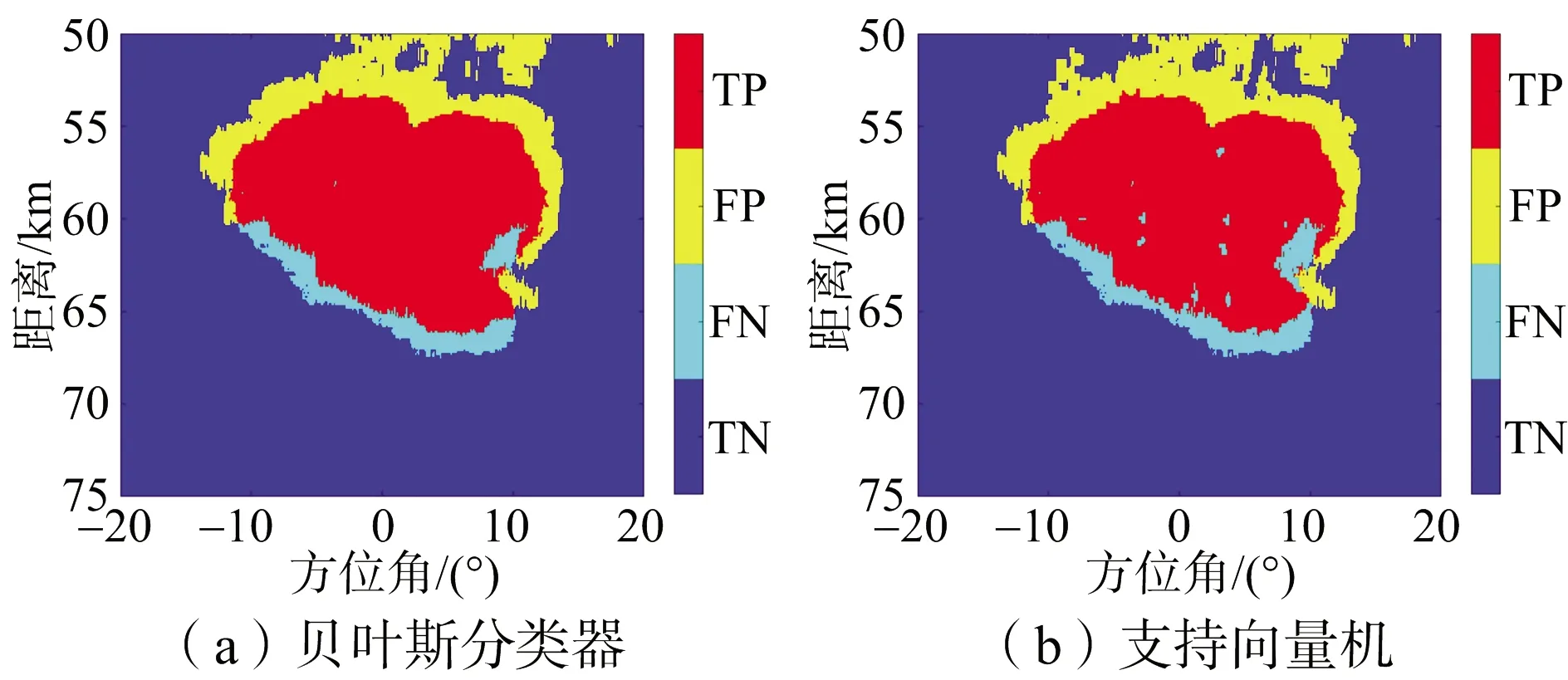
圖9 使用不同分類器對應的檢測結果
5 結束語
為檢測強地雜波背景中的氣象目標,本文提出了一種基于CNN的目標檢測方法。該算法結合多普勒域信息和空域信息,將CNN作為分類器實現對氣象目標的檢測。文中詳細講述了該方法的實現流程以及CNN的具體結構,并通過仿真結果表明,該方法可有效用于氣象目標的檢測。與現有的大多數方法相比,該算法具有更優的檢測性能,并能很好地克服譜矩信息變化帶來的影響,具有一定的實用價值。
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
兒童故事畫報(2019年5期)2019-05-26 14:26:14
海峽科技與產業(2016年3期)2016-05-17 04:32:12
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12