基于模糊PID的汽車空調控制器設計
2021-10-09 09:44:34楊萍萍
自動化儀表 2021年9期
關鍵詞:系統
楊萍萍,馬 亮
(1.北京科技大學高等工程師學院,北京 100083;2.北京科技大學順德研究生院,佛山 528399;3.北京科技大學自動化學院,北京 100083)
0 引言
汽車是當今人們生活中必不可少的一部分。根據《人民日報》報道,2019年全國汽車保有量達2.6億輛,其中新注冊登記汽車2 578萬輛,居于全球前列[1]。汽車空調系統作為衡量汽車安全性的重要指標之一,能夠改善車內空氣溫度、濕度和清潔度,為駕駛員和乘客提供良好的空氣環境,保障安全、高效行車。汽車空調系統的發展主要經歷了獨立制暖階段、獨立制冷階段、冷暖一體式階段、自動控制汽車空調以及微型計算機控制階段[2]。隨著能源緊張和環境污染問題日益突出,對汽車空調的控制系統也提出了新要求,不再是簡單地實現制冷制熱功能,而是更為合理、嚴謹和科學的系統工程。因此,對汽車空調控制系統的研究、優化和創新成為了整個汽車產業關注的焦點。
目前的汽車空調控制系統可分為兩類。第一類汽車空調控制系統是開環系統,即輸出輸入之間沒有反饋回路。這類空調廣泛應用在經濟型車輛上,由使用者完成對空調的控制,方便性和舒適性較低。第二類汽車空調控制系統是以比例積分微分(proportional integral differential,PID)控制器為核心的閉環系統。日本汽車工程師Masatoshi Mituiu將PID控制應用在汽車空調系統中[3],使汽車空調的舒適性大大提升,取得了良好的控制效果。
汽車空調控制系統作為一個典型的非線性控制系統,存在諸多不確定性和隨機性。因此,采用對模型依賴極強的傳統PID控制器,很難滿足使用者的需求,無法獲得較好的使用體驗。然而,汽車空調系統所具有的復雜性和不確定性,恰好與模糊PID控制器的特點和設計思路相吻合。將模糊控制器和常規PID控制器相結合,在系統變化的過程中由模糊控制器控制PID控制器變化。對于一個變化的被控對象,模糊PID控制器能夠一直適應系統的變化,達到良好的控制效果[4-6]。因此,采用模糊PID控制器的汽車空調控制系統將會彌補系統的不確定性,提高系統動態性能,獲得更優秀的控制效果。
本文嘗試將模糊PID控制器和汽車空調系統相結合,并在MATLAB仿真平臺上將其與傳統PID控制器在同一汽車空調系統上進行仿真試驗,對比性能優劣。
1 汽車空調系統總體熱負荷模型
汽車空調系統總體熱負荷模型如圖1所示。
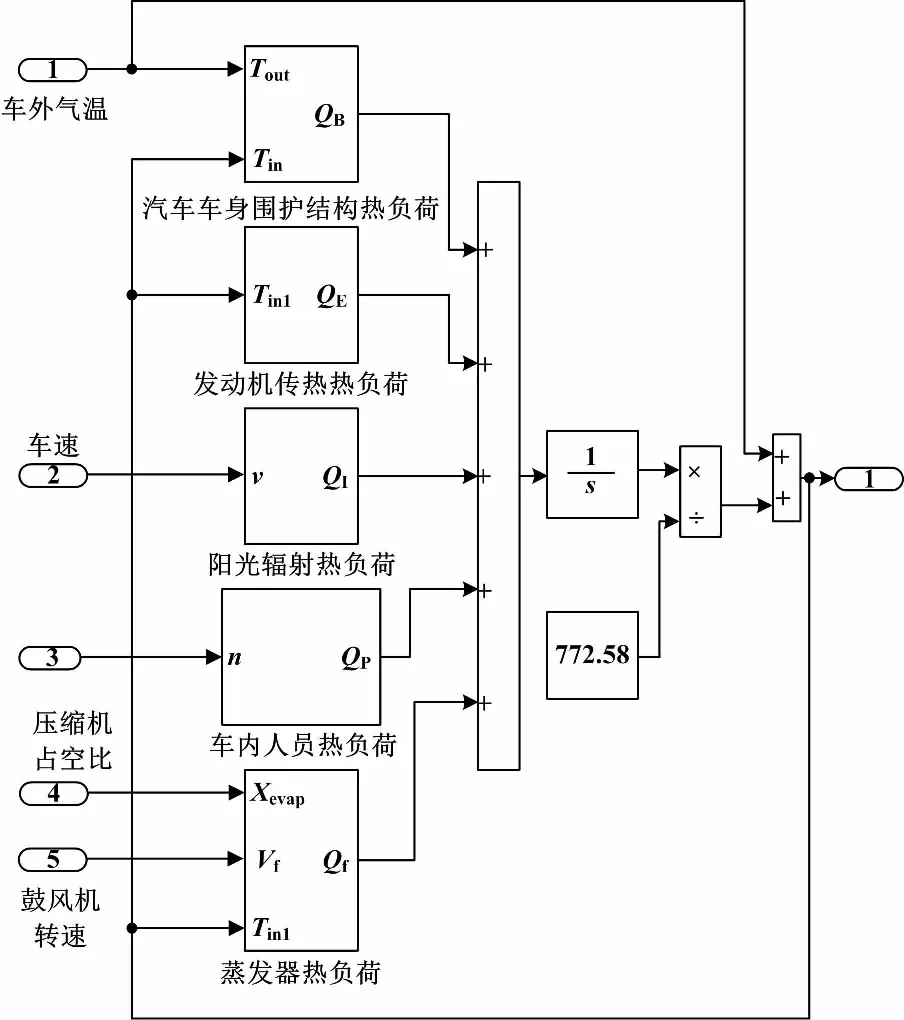
圖1 汽車空調系統總體熱負荷模型
汽車空調系統由制冷循環系統、空氣循環系統和電氣控制系統3個部分構成。制冷循環系統是汽車空調系統的核心,主要由壓縮機、冷凝器、蒸發器和節流裝置4個部件組成[7-8]。空氣循環系統的功能是促進空氣流動,使制冷循環系統產生的冷氣進入汽車室內,起到通風換氣作用。其主要部件包括鼓風機、空氣凈化裝置、風柵和必要的通風管道等。電氣控制系統是汽車空調系統的大腦,起到控制、調節和優化的作用。在電氣控制系統的作用下,冷氣循環系統和空氣循環系統相互配合、協同工作,實現汽車空調系統調節溫度的功能。
熱負荷是指空調在制冷過程中需要平衡的熱量負荷。汽車空調的熱負荷來源可分為內部熱負荷和外部熱負荷2類。內部熱負荷中,車室內定量熱負荷QC為:
QC=1 000mΔh=1 000ρVcPΔT′
(1)
式中:m為車室內空氣總質量;Δh為車室內空氣焓值變化量;ρ為空氣密度;V為車室容積;cP為空氣比熱容;ΔT′為車室內空氣溫度與設定溫度差值。
發動機傳熱熱負荷QE為:
QE=KEFEΔT=KEFE(TEngine-Tin)
(2)
式中:KE為導熱系數;FE為發動機前圍面積;ΔT為發動機艙和車室內溫度差;TEngine為發動機艙溫度;Tin為車室內實際溫度。
車內人員熱負荷QP為:
QP=QDriver+QPassenger(n-1)n′
(3)
式中:QDriver為司機產熱量;QPassenger為乘客產熱量;n為車內乘客數;n′為人群聚集系數。
蒸發器熱負荷Qf為:
Qf=1 000ρvfSfcpKevapλ(0-Tin)Xevap
(4)
式中:ρ為空氣密度;vf為鼓風機運轉速度;Sf為風機出風口面積;cP為空氣比熱容;Kevap為蒸發器熱交換系數;λ為風速閥門開度;Xevap為占空比。
外部熱負荷有汽車車身圍護結構熱負荷QB,為:
QB=K1F1(Tout-Tin)
(5)
式中:K1為導熱系數,取決于車身非透光部分結構與材料等;F1為車身非透光結構面積;Tout為車外空氣溫度;Tin為車內空氣溫度。
陽光輻射熱負荷QI為:
(6)
式中:I為陽光光強大小;η為太陽能量通過車窗進入車內的比例系數;Fg為垂直于陽光方向的車窗有效面積;K1為導熱系數,取決于車身非透光部分結構與材料等;Fs為平行于陽光方向的車窗有效面積;ρg為車身表面吸收系數;αH為車身表面與環境空氣換熱系數。
根據熱力學對流換熱準則公式,可得:
(7)
式中:v為車速。
在汽車的使用中,乘客上下車的過程會造成劇烈的熱交換。但相對于幾十分鐘甚至幾個小時的汽車空調使用時間,上下車帶來的熱負荷QD可以被看作是一個脈沖擾動,不同的上下車時間意味著不同的脈沖的幅值,從而實現用數學語言對其進行表達。
熱負荷總量QT為以上各類熱負荷之和:
QT=QC+QE+QP+Qf+QB+QI+QD
(8)
2 基于PID的汽車空調控制器設計
汽車空調系統是一個兩輸入系統,其被控變量分別是壓縮機的占空比和鼓風機的轉速。采用試湊法,得到如表1所示的控制品質最佳的壓縮機和鼓風機控制器參數。
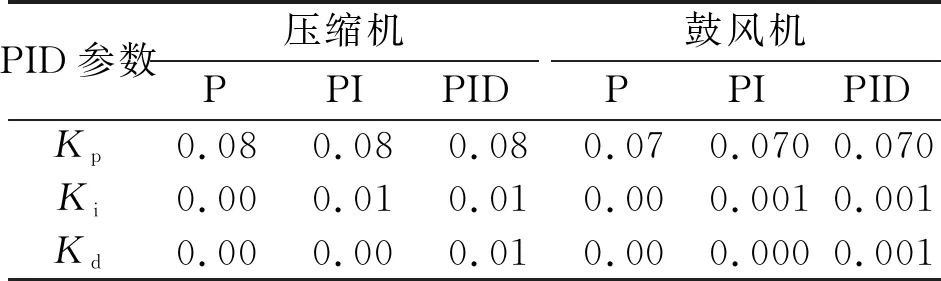
表1 壓縮機與鼓風機控制器參數
PID控制器系統如圖2所示。
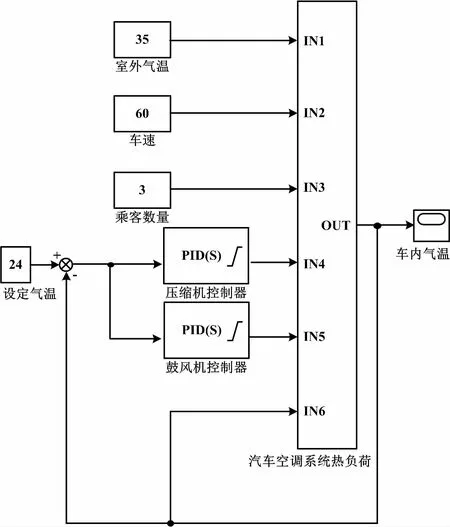
圖2 PID控制器系統仿真圖
在Simulink中搭建如圖2所示的PID控制器系統仿真圖,并對壓縮機占空比和鼓風機的轉速加以限幅,使控制器的輸出值滿足實際物理要求。將熱負荷模型、控制器模型先封裝為子系統,再構成汽車空調系統的仿真模型。
在仿真模型中,系統的給定值為用戶設定舒適溫度24 ℃。系統的變化參數分別為室外氣溫、車速和乘客數量。通過控制變量法改變這3個參數,可對不同使用情況進行模擬。
①假設在汽車空調使用過程中,固定車速為60 km/h,固定車內乘客數量為3人,室外溫度分別為34 ℃、36 ℃和38 ℃。設置仿真時間為500 s,得到如圖3所示的變室外溫度下的PID控制器仿真曲線。
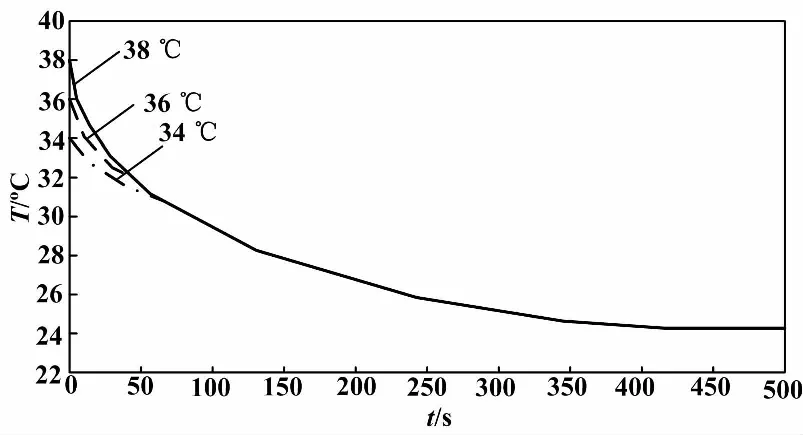
圖3 變室外溫度下的PID控制器仿真曲線
②假設在汽車空調使用過程中,固定室外溫度為36 ℃,固定車內乘客數量為3人,車速分別為20 km/h、60 km/h和100 km/h。設置仿真時間為500 s,得到如圖4所示的變車速下的PID控制器仿真曲線。
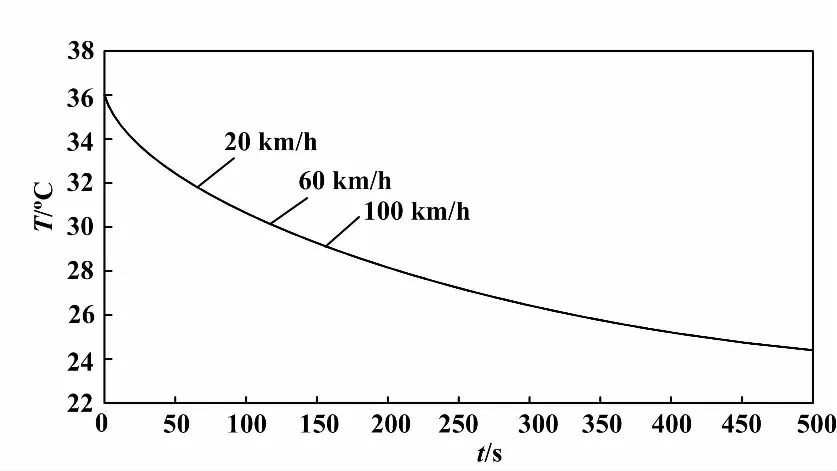
圖4 變車速下的PID控制器仿真曲線
③假設在汽車空調使用過程中,固定室外溫度為36 ℃,固定車速為60 km/h,乘客人數分別為1位、3位和5位。設置仿真時間為500 s,變乘客人數下的PID控制器仿真曲線如圖5所示。
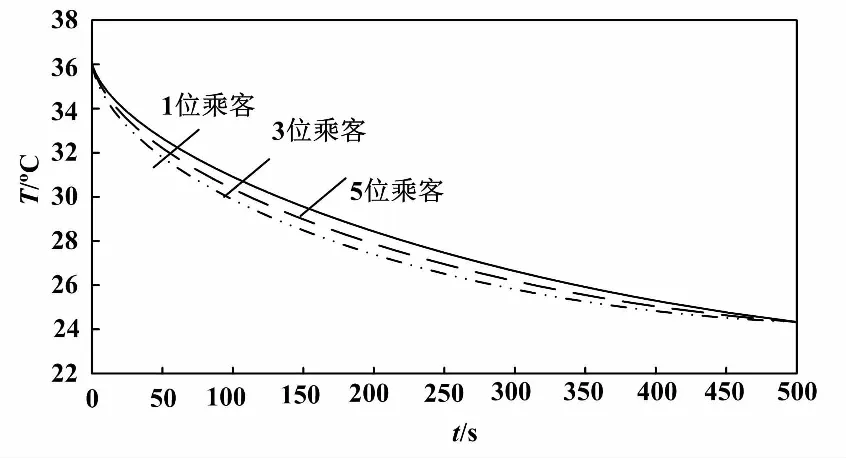
圖5 變乘客人數下的PID控制器仿真曲線
總體看來,常規PID控制器作用于汽車空調系統能讓系統輸出穩定到達設定值,基本能夠滿足控制要求。但是在不同情況下,系統的調節時間均較長,響應速度慢。當系統變化劇烈(例如乘客數量變化)時,溫度變化曲線差異較大,系統魯棒性較差,整體控制效果還存在優化的空間。
3 基于模糊PID的汽車空調控制器設計
選用兩輸入、三輸出的模糊控制器,控制器的兩個輸入分別為誤差值和誤差變化率。模糊控制器的輸出為PID控制器三個參數的變化值。在PID控制器初始參數的基礎上,增加了模糊控制器的輸出值,提高了控制器對環境的適應能力。
3.1 模糊化
模糊控制器的輸入為輸出值和給定值之間的誤差值,范圍取±4 ℃之間,劃分為9個等級。誤差變化率的范圍在±3 ℃之間,劃分為7個等級。若實際使用中溫度誤差超過變化范圍,可將超出的量認定為邊界值。對于輸出值,它們的論域選取為[-5,5],并將其劃分為11個等級,可表示為:
E={-4,-3,-2,-1,0,1,2,3,4}
(9)
EC={-3,-2,-1,0,1,2,3}
(10)
ΔK={-5,-4,-3,-2,-1,0,1,2,3,4,5}
(11)
接著將清晰的論域轉化為模糊集合,定義為{負大,負中,負小,零,正小,正中,正大},簡寫為{NB,NM,NS,Z,PS,PM,PB}。
3.2 確定隸屬度函數
隸屬度函數一般有三角形函數、梯形函數、正態分布函數、S形函數等[9]。輸入變量E中間5條隸屬度函數選為高斯型,兩側隸屬度函數選為鐘形;輸入變量EC的隸屬度函數,全部選為高斯型;輸出變量的隸屬度函數選為三角形,并且輸出變量的隸屬度函數一致。隸屬度函數如圖6所示。
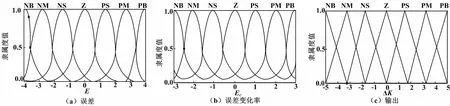
圖6 隸屬度函數圖
3.3 模糊PID控制規則設計
在設計控制規則時,首先應該保證溫度能夠快速到達設定溫度,以滿足空調最基本的要求;其次,風速對舒適性的影響較大,因此當實際溫度接近設定溫度時,應控制鼓風機的風量不要過大,從而提高汽車空調系統的舒適度。
3.4 解模糊
在工業控制領域,主要采用加權平均法進行解模糊[10]。MATLAB能夠直接得到輸出曲面,如圖7所示。
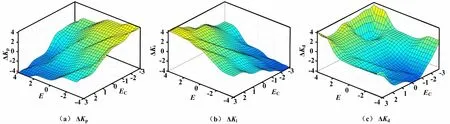
圖7 輸出曲面圖
3.5 模糊PID控制器空調系統仿真
在Simulink中搭建模糊PID控制器的仿真圖。經過反復調試,確定模糊PID控制器輸入輸出環節的比例因數。對壓縮機和鼓風機的控制使用同一套模糊控制規則,得到二者的模糊PID控制器結構,并將控制器置于汽車空調系統中。
以空調的熱負荷作為被控變量,構建如圖8所示的模糊PID控制器系統結構。
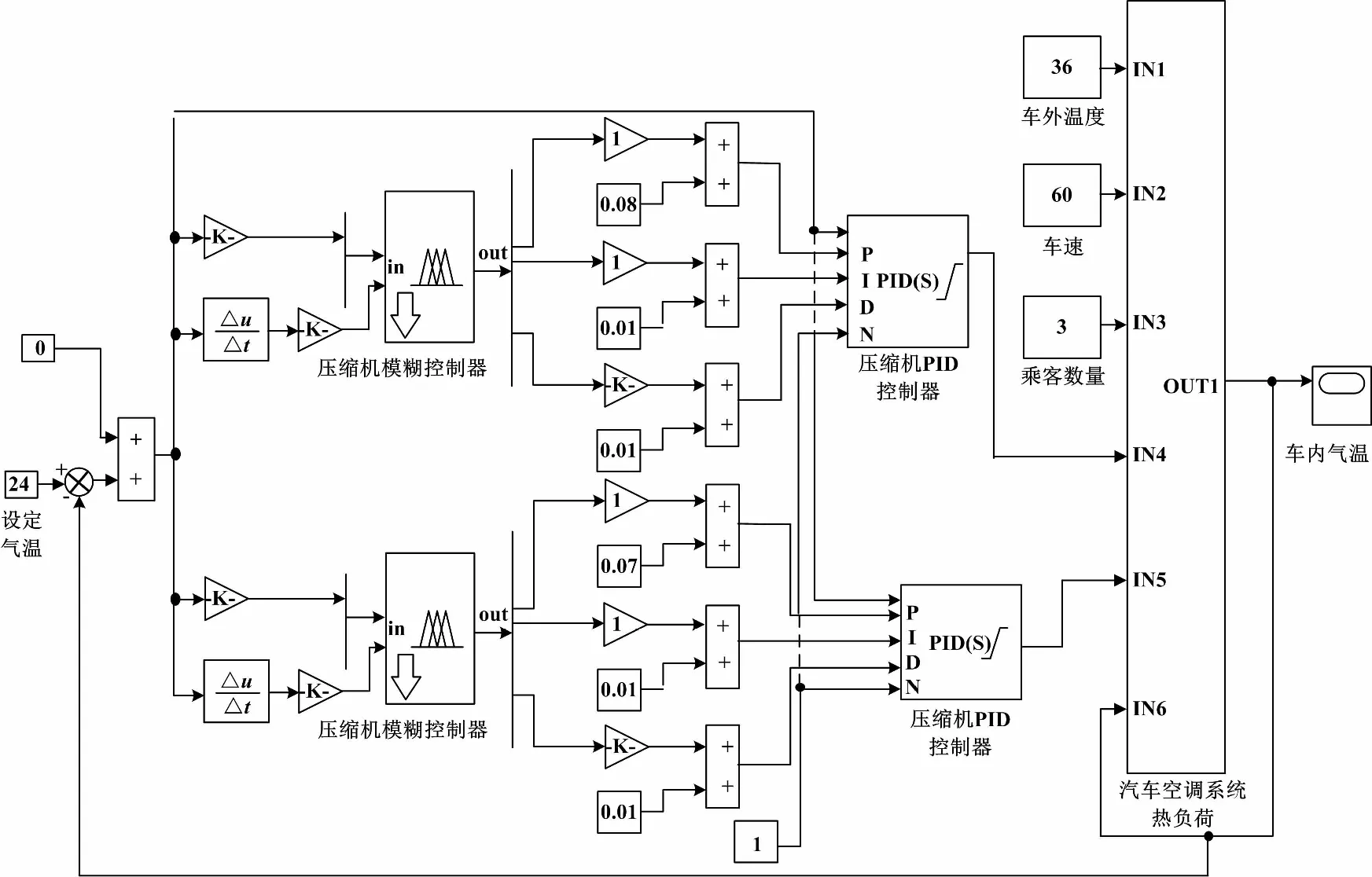
圖8 模糊PID控制器系統結構圖
在仿真模型中,將系統的給定值設為24 ℃。仍然通過控制變量法改變室外氣溫、車速和乘客數量這3個參數,對應前面3種不同使用情況進行仿真,得到如圖9、圖10、圖11所示的模糊PID控制器仿真曲線。
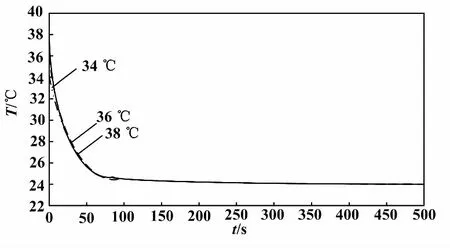
圖9 變室外溫度下的模糊PID控制器仿真曲線
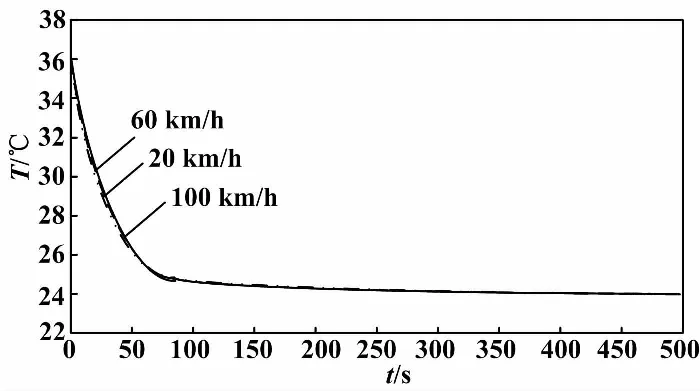
圖10 變車速下的模糊PID控制器仿真曲線
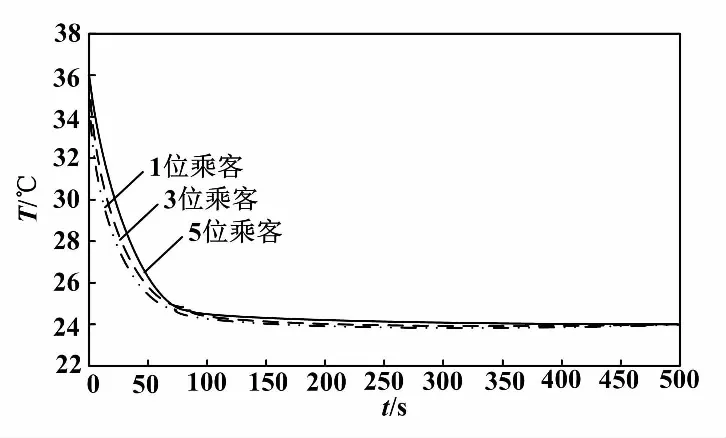
圖11 變乘客人數下的模糊PID控制器仿真曲線
從仿真結果可以看出,在模糊PID控制器的作用下,系統能夠保持穩定,并且較為準確地到達設定溫度24 ℃。當乘客數量不同時,相比于常規PID控制器,3種情況下溫度變化曲線的差別較小。溫度響應曲線進入穩態值±3%的穩態誤差帶,即24.7 ℃。當車內有1位乘客時,調節時間大約為95 s;當車內有3位乘客時,調節時間約為100 s;當車內有5位乘客時,調節時間約為105 s。雖然乘客數量的變化對系統響應的影響較大,但是模糊PID控制器能夠較好地適應系統的變化,并能根據實時的變化情況時刻對系統進行校正。在不同乘客數量時,調節時間均能控制在100 s左右,系統魯棒性較好,滿足汽車空調舒適度的要求。
對比常規PID控制器和模糊PID控制器的控制品質,假設室外溫度為36 ℃,汽車車速為60 km/h,車內乘客數量為3人,仿真時間為500 s,常規PID與模糊PID控制器仿真對比如圖12所示。
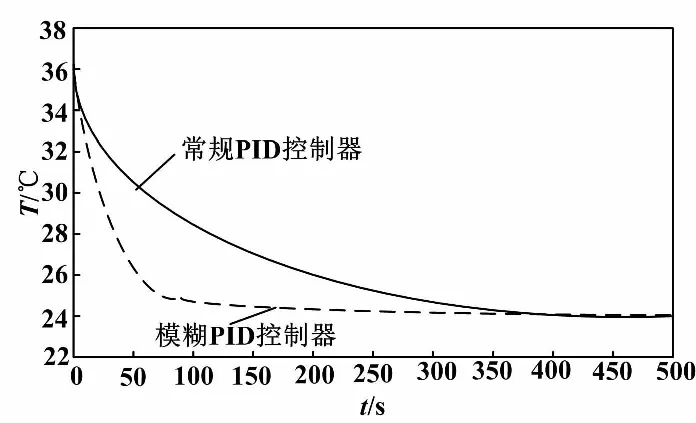
圖12 常規PID與模糊PID控制器仿真對比
從圖12可看出,首先,在模糊PID控制器作用下,系統調節時間約為100 s。相比于常規PID控制器作用下的調節時間300 s,模糊PID控制器使調節時間縮短為三分之一,系統響應速度大幅提高。其次,在初始的一段時間里,在模糊控制器的作用下,模糊PID控制器的輸出控制信號較大,改善系統動態性能;在溫度逐漸接近設定溫度24 ℃時,在模糊控制器的作用下,模糊PID控制器的參數不斷變化,使曲線更加平滑。從響應曲線中可以發現,在穩態誤差帶內,對于同一溫度值,模糊PID控制器的曲線斜率總小于常規PID控制器的曲線斜率。因此,在打開汽車空調初期,使用者會感到空調迅速制冷,符合用戶的預期;在溫度靠近設定值時,溫度變化會更加柔和,能夠滿足汽車空調舒適性的要求。
總體看來,與常規PID控制器相比,模糊PID控制器作用于汽車空調系統,能使系統有更快的響應速度、更高的魯棒性、更好的舒適性。因此,采用模糊PID控制器的空調系統更能滿足用戶對汽車空調的需求。
4 結論
本文根據熱力學原理,在MATLAB仿真平臺上建立汽車空調系統的數學模型,并設計了常規PID控制器和模糊PID控制器。仿真研究表明,模糊PID控制器在系統動態性能、魯棒性及空調的舒適性方面相比于常規PID控制器有很大提高,能較好地滿足用戶對汽車空調的使用需求。然而,本文在建模過程中只選取了較為主要的空調熱負荷,舍棄了一些難以量化的參量,造成與實際情況存在一些差異,且仿真試驗的現實參考意義有限。未來將在實際設備上進行測試,對模糊PID控制器與汽車空調系統的結合進行更深入的研究。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
