基于三次多項(xiàng)式的磁彈性傳感器非線(xiàn)性誤差修正
2021-10-11 05:54:28劉曉蒙張懷鎖
自動(dòng)化儀表 2021年8期
關(guān)鍵詞:單片機(jī)
劉曉蒙,張懷鎖
(上海工業(yè)自動(dòng)化儀表研究院有限公司,上海 200233)
0 引言
鐵磁性物質(zhì)發(fā)生變形或在應(yīng)力的作用下,其磁導(dǎo)率會(huì)發(fā)生變化。這是磁致伸縮的逆效應(yīng)[1]。利用此效應(yīng)制成的測(cè)力傳感器稱(chēng)為磁彈性傳感器[2-4]。與電阻應(yīng)變式傳感器不同,磁彈性傳感器在受力時(shí)產(chǎn)生微小應(yīng)變。一般來(lái)說(shuō),在額定載荷下,磁彈性傳感器內(nèi)部的應(yīng)力約為60 MPa,受力方向的變形量約為30 μm[5]。磁彈性傳感器承受額定負(fù)載時(shí)的應(yīng)力遠(yuǎn)小于其制造材料的屈服強(qiáng)度。因此,磁彈性傳感器具有較高的過(guò)載能力,非常適用于測(cè)量金屬板材的軋制力和橋梁支撐柱的壓力。
磁彈性傳感器測(cè)量的是力,輸出的是電壓或電流信號(hào)。理論上,傳感器輸出和輸入之間是線(xiàn)性關(guān)系。實(shí)際上,傳感器的輸入輸出特性都是非線(xiàn)性的,存在非線(xiàn)性誤差[6-7]。為使傳感器的輸出達(dá)到理想狀態(tài),可以從軟件上進(jìn)行修正。本文將探討使用三次多項(xiàng)式修正數(shù)據(jù)的方法。
1 非線(xiàn)性誤差的定義
傳感器的非線(xiàn)性誤差(線(xiàn)性度)、重復(fù)性、回差(或稱(chēng)遲滯、遲后)和靈敏度是衡量傳感器靜態(tài)特性的重要指標(biāo)。國(guó)標(biāo)GB/T 18459—2001《傳感器主要靜態(tài)性能指標(biāo)計(jì)算方法》中,對(duì)非線(xiàn)性誤差的定義為:正、反行程實(shí)際平均特性曲線(xiàn)相對(duì)于參比直線(xiàn)(理論直線(xiàn))的最大偏差。參比直線(xiàn)可以用傳感器空載時(shí)輸出的零點(diǎn)值和額定負(fù)載的輸出值這2個(gè)端點(diǎn)連線(xiàn)擬合。非線(xiàn)性誤差δl的計(jì)算方法如下:
(1)
式中:ri為被試試驗(yàn)點(diǎn)上3次正行程實(shí)際輸出信號(hào)值的算術(shù)平均值;Ui為被試試驗(yàn)點(diǎn)上理論輸出信號(hào)值;UN為理論輸出信號(hào)量程。
非線(xiàn)性誤差由所有試驗(yàn)點(diǎn)中最大的δl確定,UN和Ui分別由式(2)、式(3)確定。
UN=UM-U0
(2)
(3)
式中:UM為載荷為上限時(shí)3次正行程實(shí)際輸出信號(hào)的算術(shù)平均值;U0為載荷為下限時(shí)3次正行程實(shí)際輸出信號(hào)的算術(shù)平均值;i為被試試驗(yàn)點(diǎn)序數(shù);k為被試試驗(yàn)點(diǎn)總數(shù)。
2 非線(xiàn)性誤差的修正方法
2.1 三次多項(xiàng)式曲線(xiàn)擬合
對(duì)于磁彈性傳感器的非線(xiàn)性誤差,可以通過(guò)軟件進(jìn)行修正,使傳感器的輸出曲線(xiàn)逼近理想直線(xiàn)。常用的修正方法有神經(jīng)網(wǎng)絡(luò)修正、自適應(yīng)補(bǔ)償和多項(xiàng)式曲線(xiàn)擬合修正[8-11]。曲線(xiàn)擬合修正的基本思想是設(shè)計(jì)一個(gè)以傳感器直接輸出為變量的多項(xiàng)式,使經(jīng)過(guò)多項(xiàng)式計(jì)算后的輸出數(shù)據(jù)逼近理想直線(xiàn)[12]。
修正非線(xiàn)性誤差的多項(xiàng)式可以表示為:
W(r)=a0+a1r+a2r2+...+anrn
(4)
式中:W(r)為修正后的數(shù)據(jù);r為傳感器的輸出;n為階次,由于三次多項(xiàng)式修正的方法更實(shí)用[13],此處n取3;a0~a3為4個(gè)系數(shù)。
2.2 三次多項(xiàng)式系數(shù)的計(jì)算方法
求解三次多項(xiàng)式,就是求解三次多項(xiàng)式系數(shù)。通過(guò)算法使多項(xiàng)式與傳感器理論值的均方誤差為最小值,就可以確定多項(xiàng)式的系數(shù)。由式(4)計(jì)算得到的W(ri)與理論值Ui之間必然存在誤差Δi。其方差為:
(5)
式中:i為被試試驗(yàn)點(diǎn)序數(shù),i=1,2...k,k為被試試驗(yàn)點(diǎn)總數(shù)。
誤差Δi的均方誤差R可以表示為:

R(a0,a1,a2,a3)
(6)
為使均方誤差為最小值,對(duì)其四個(gè)變量求偏導(dǎo),并使其等于0。
(7)
整理后得出方程組:
(8)
通過(guò)試驗(yàn)確定試驗(yàn)點(diǎn)的測(cè)量值和傳感器的輸出數(shù)值后,求解非齊次線(xiàn)性方程組(8)就可以得出a0~a3這4個(gè)系數(shù)。一般來(lái)說(shuō),方程組(8)中,方程的個(gè)數(shù)和未知量的個(gè)數(shù)相等,并且系數(shù)行列式D不為零,因此方程組有唯一解,可以使用克萊姆法則求解[14-16]。
(9)
(10)
式中:Di為把D中第i列的各元素?fù)Q成常數(shù)項(xiàng)[V,X,Y,Z]T的行列式,i=1,2,3,4。
例如,D2為:
(11)
2.3 單片機(jī)求解三次多項(xiàng)式系數(shù)
磁彈性傳感器系統(tǒng)包括傳感器本體和與其配套的二次儀表。二次儀表主要包括勵(lì)磁電源和信號(hào)處理兩部分,一般運(yùn)用單片機(jī)處理,很容易實(shí)現(xiàn)非線(xiàn)性誤差校正。用單片機(jī)求解三次多項(xiàng)式4個(gè)系數(shù)的流程如圖1所示。
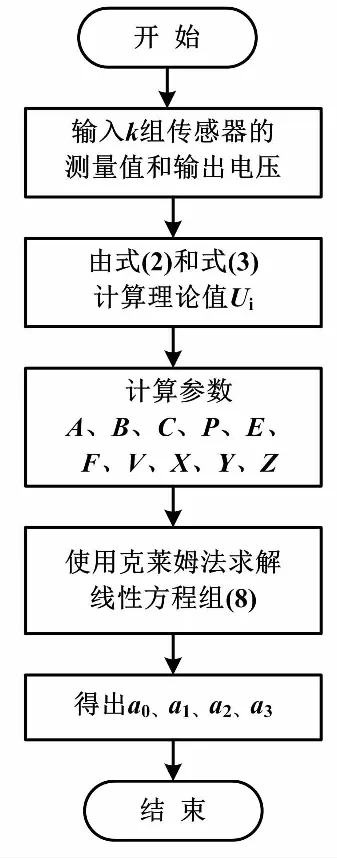
圖1 求解三次多項(xiàng)式4個(gè)系數(shù)的流程圖
3 試驗(yàn)驗(yàn)證
3.1 原始數(shù)據(jù)分析
當(dāng)傳感器的回差和重復(fù)性誤差較小時(shí),可以采用軟件修正的方法提高非線(xiàn)性誤差。為驗(yàn)證三次多項(xiàng)式修正傳感器非線(xiàn)性誤差的效果,使用上海工業(yè)自動(dòng)化儀表研究院生產(chǎn)的400 t磁彈性軋制力傳感器進(jìn)行驗(yàn)證。此類(lèi)傳感器安裝在軋機(jī)支撐座上,直接承受軋制力。傳感器為圓盤(pán)形,外徑為280 mm,高度為74 mm。磁彈性傳感器和二次儀表如圖2所示。測(cè)試試驗(yàn)在福建省科學(xué)計(jì)量院進(jìn)行。測(cè)試設(shè)備是500 t的標(biāo)準(zhǔn)力試驗(yàn)機(jī)。
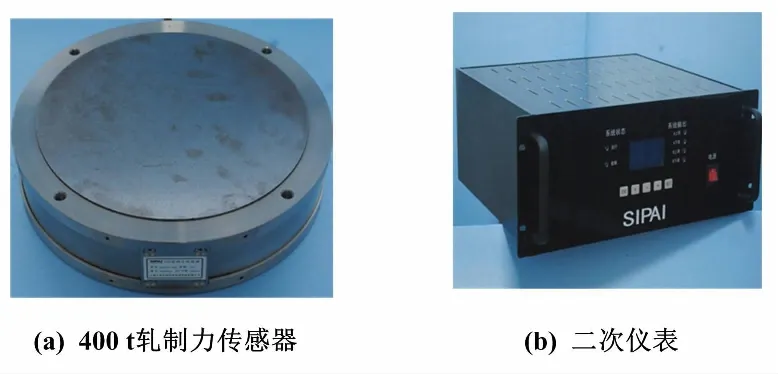
圖2 磁彈性傳感器和二次儀表
測(cè)試試驗(yàn)范圍為0~400 t,加載間隔為40 t。測(cè)試數(shù)據(jù)和非線(xiàn)性誤差如表1所示。表1中:L、ri、Ui、δl1、W(ri)和δl2分別代表加載力(t)、傳感器原始輸出電壓(mV)、傳感器理論輸出電壓(mV)、傳感器原始輸出的非線(xiàn)性誤差(%)、修正后的輸出電壓數(shù)據(jù)(mV)和修正后的非線(xiàn)性誤差(%)。理論輸出電壓由三次行程的算術(shù)平均值的端點(diǎn)連線(xiàn)擬合法計(jì)算得出。對(duì)比表1可以看出,傳感器原始輸出的非線(xiàn)性誤差為2.75%,誤差較大。
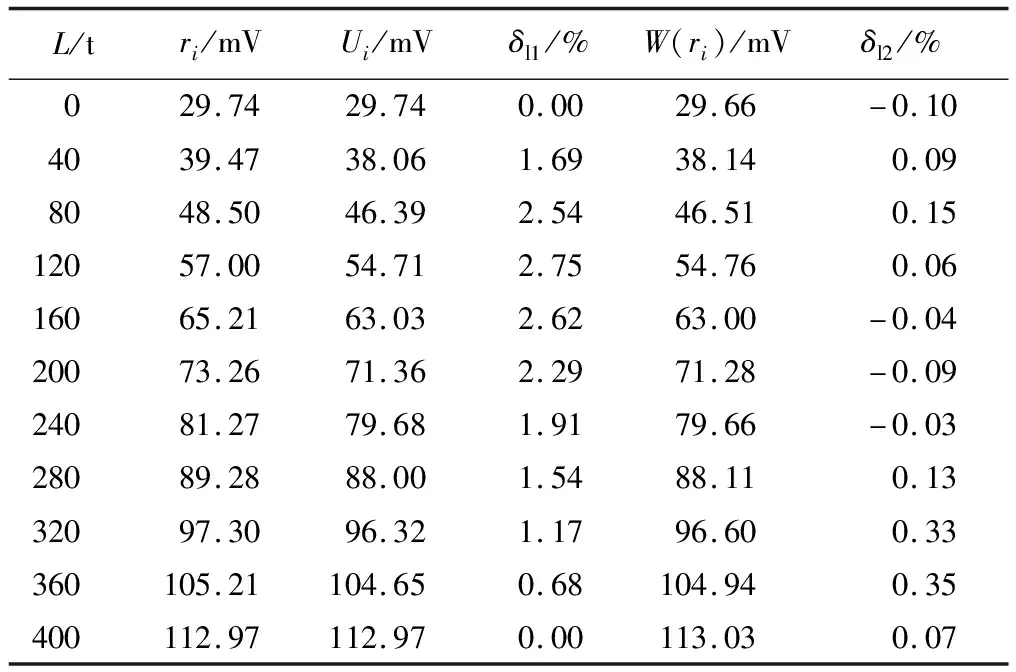
表1 測(cè)試數(shù)據(jù)和非線(xiàn)性誤差
3.2 修正數(shù)據(jù)
為提高傳感器的非線(xiàn)性誤差,按照第2節(jié)中的公式計(jì)算三次多項(xiàng)式的4個(gè)系數(shù):a0=-0.083 5;a1=0.839 4;a2=3.5×10-3;a3=-1.86×10-5。
再次對(duì)傳感器進(jìn)行試驗(yàn),各個(gè)測(cè)試點(diǎn)加載的質(zhì)量與之前相同。傳感器的非線(xiàn)性誤差從2.75%減小到0.35%,大大降低了非線(xiàn)性誤差。傳感器原始輸出數(shù)據(jù)和修正后的數(shù)據(jù)對(duì)比如圖3所示。
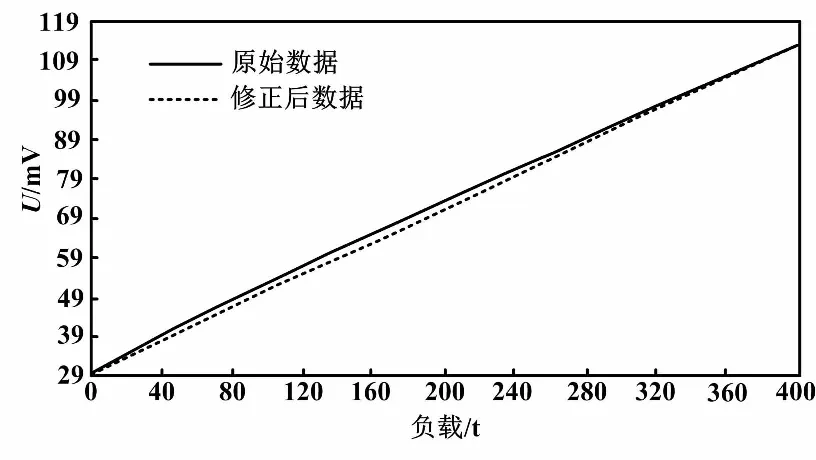
圖3 傳感器原始輸出數(shù)據(jù)和修正后的數(shù)據(jù)對(duì)比
4 結(jié)論
非線(xiàn)性誤差是傳感器的關(guān)鍵指標(biāo),直接影響產(chǎn)品的定級(jí)。對(duì)于重復(fù)性好和回差小的傳感器,可以用軟件修正其非線(xiàn)性誤差。三次多項(xiàng)式修正方法簡(jiǎn)單實(shí)用,使用單片機(jī)的儀表在現(xiàn)場(chǎng)即可修正非線(xiàn)性誤差。本文在磁彈性傳感器上驗(yàn)證了三次多項(xiàng)式曲線(xiàn)擬合修正的方法。對(duì)于電阻應(yīng)變式傳感器和其他線(xiàn)性?xún)x表,此法同樣適用。
猜你喜歡
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年11期)2019-07-04 00:34:48
電子制作(2019年9期)2019-05-30 09:42:02
電子制作(2018年12期)2018-08-01 00:48:04
電子制作(2017年9期)2017-04-17 03:00:53
電子制作(2017年19期)2017-02-02 07:08:27
電子制作(2016年21期)2016-05-17 03:52:51
電子設(shè)計(jì)工程(2015年15期)2015-02-27 12:07:30
電子設(shè)計(jì)工程(2015年8期)2015-02-27 12:05:36
