基于電量參數特征分析的逆變器開路故障診斷方法研究
2021-10-11 06:12:12劉志龍李曈希聶常華唐樟春李嘉明
自動化儀表 2021年8期
劉志龍,李曈希,聶常華,湛 力,唐樟春,歐 柱,李嘉明,徐 堯
(1.中國核動力研究設計院,四川 成都 610000;2.電子科技大學機械與電氣工程學院,四川 成都 611731;3.電子科技大學廣東電子信息工程研究院,廣東 東莞 523000)
0 引言
電壓源逆變器廣泛應用于核能、航天、電力拖動等領域,扮演著越來越重要的角色。電壓源逆變器故障診斷方法分為三類:基于電流信號的逆變器開路故障診斷方法[1-4],基于電壓信號的逆變器開路故障診斷方法[5-7],基于智能算法的逆變器開路故障診斷方法[8-12]。基于電壓信號的逆變器開路故障診斷方法有著其他診斷方法所不具備的優勢,但是也存在著很多缺陷,例如需要額外的硬件傳感器或者電路進行電壓采集。基于電流信號的逆變器開路故障診斷方案診斷成本低,但是其診斷效果不佳,例如各相電流信號容易受到噪聲的影響,因而影響到診斷結果。與此同時,這種診斷方法的診斷效果與逆變器負載的變化關系巨大,負載的變化會造成誤診斷。基于智能算法的逆變器開路故障診斷方法的診斷性能良好,但是往往計算量大。
針對以上基于電流信號的逆變器開路故障診斷方法和基于電壓信號的逆變器開路故障診斷方法的缺陷,本文提出了基于電量參數特征分析的逆變器開路故障診斷方法。該方法在保留基于電壓信號的逆變器開路故障診斷方法優越性的同時,克服了基于電流信號的逆變器開路故障診斷方法可靠性低的缺陷。
1 三相逆變器線電壓特征分析
分析逆變器線電壓在非故障狀態下和故障狀態下的特點變化,即逆變器在運行時電流流向以及各個功率開關管的狀態,從而得到線電壓變化特點。
1.1 逆變器在正常狀態下的線電壓特征
首先,分析逆變器正常狀態下,線電壓uab的變化特點,具體分為4種狀態。逆變器正常運行如圖1所示。
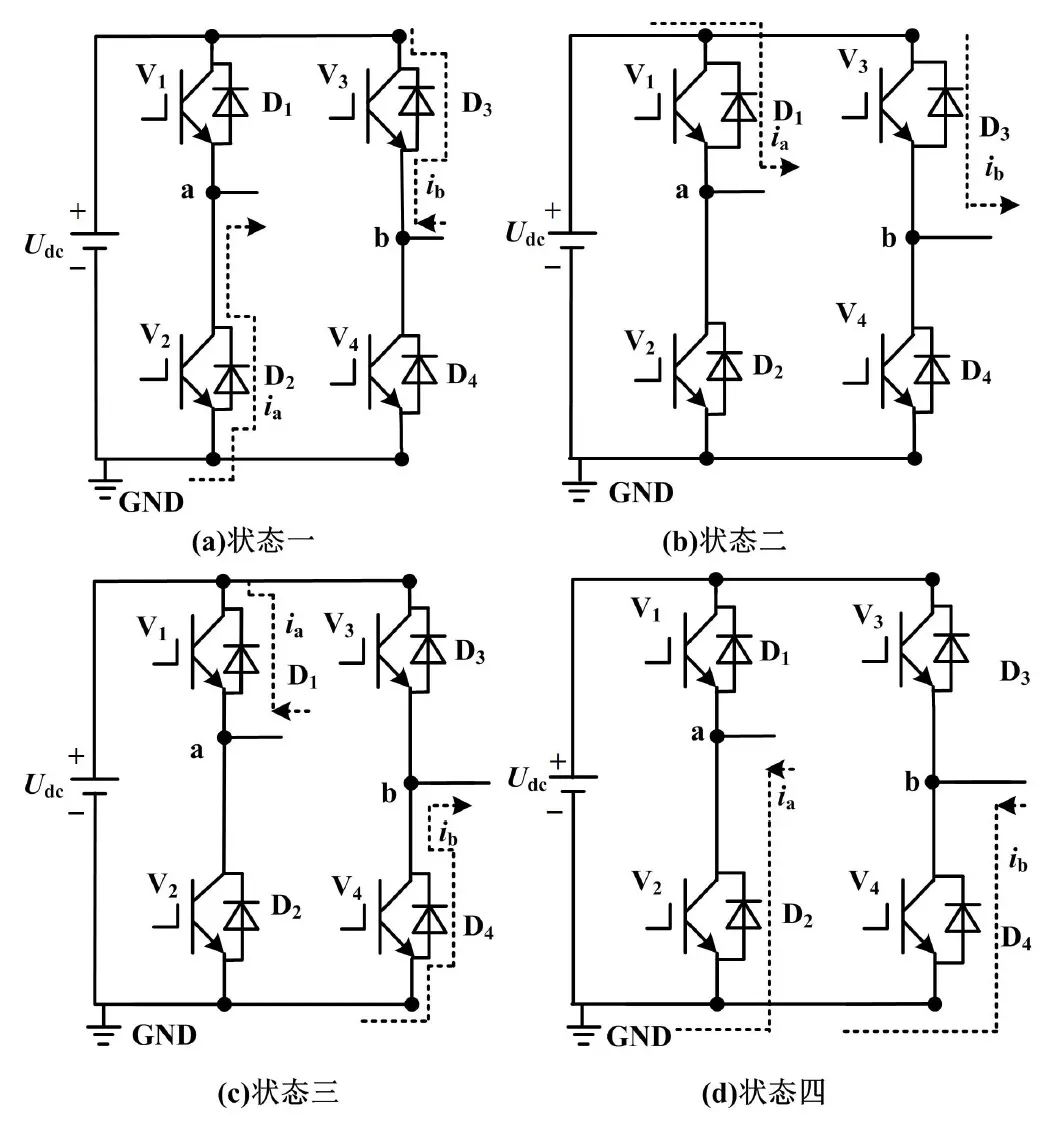
圖1 逆變器正常運行示意圖
ia、ib以圖1(b)所示方向為正。以狀態一為例:電流ia為正,電流ib為負,且開關管V3和開關管V2處于打開狀態。此時,電流ia流經D2,電流ib流經D3,如圖1(a)所示,線電壓uab的大小為-Udc。同理可得逆變器在非故障情況下其余線電壓(uab、ubc、uca)的變化特點。正常狀態下線電壓uab的變化特點如表1所示。
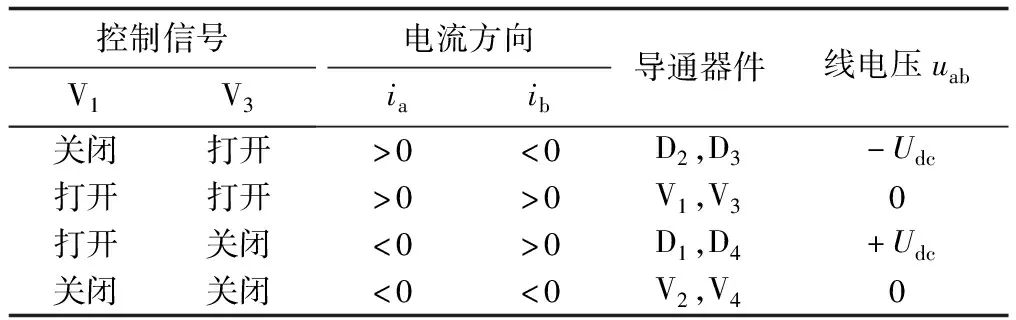
表1 正常狀態下線電壓uab的變化特點
1.2 逆變器在故障狀態下的線電壓特征
V1開路故障時逆變器運行如圖2所示。
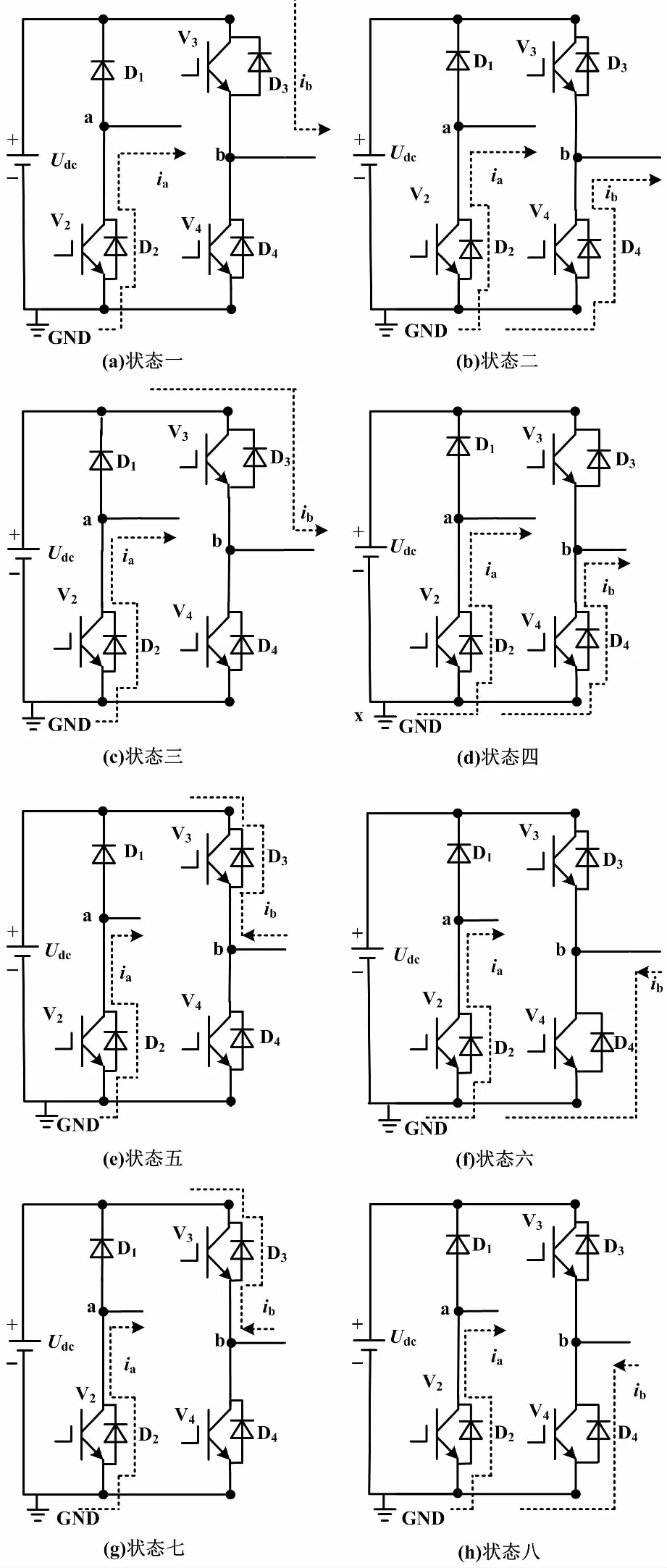
圖2 V1開路故障時逆變器運行示意圖
首先,分析V1故障對線電壓uab造成的影響,具體分為八種狀態。以狀態一為例:電流ia為正,電流ib為正,并且V1、V3的控制信號均為“打開”,二極管D2開通且開關V3導通。在這種狀態下,電流ia流經D2,電流ib流經V3,此時線電壓uab的大小為-Udc。同理,可以得出V2故障情況下,uab的變化特點。ubc、uca的變化特點分析原理相同。V1故障前后線電壓uab的變化特點如表2所示。
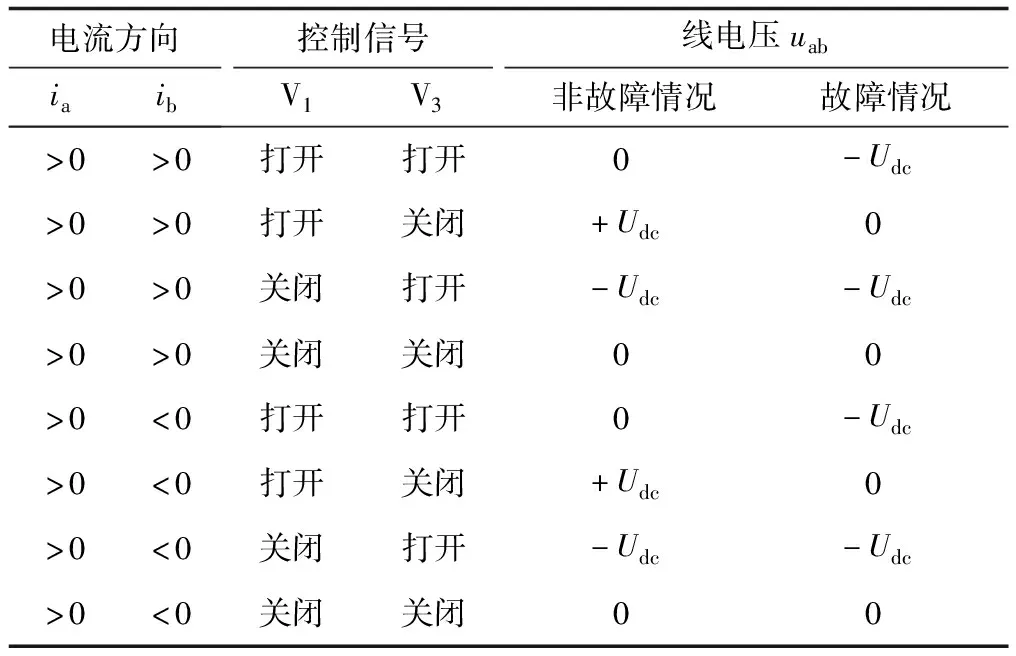
表2 V1故障前后線電壓uab的變化特點
1.3 逆變器開路故障前后的電流特征
某一功率開關管發生開路故障后,負載電流的變化會有一定的特點。V2故障后三相電流波形如圖3所示。
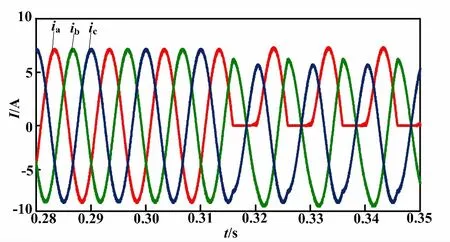
圖3 V2故障后三相電流波形
每個周期內,有半個周期逆變器電流變為零,而另外半個周期逆變器電流并沒有發生變化。如果逆變器a相橋臂開關管V2發生故障,那么在故障后的每個周期內,半個周期逆變器a相電流ia變為0,而另外半個周期逆變器a相電流ia并沒有發生變化。
2 故障診斷方案
逆變器開路故障診斷方法總體方案如圖4所示。
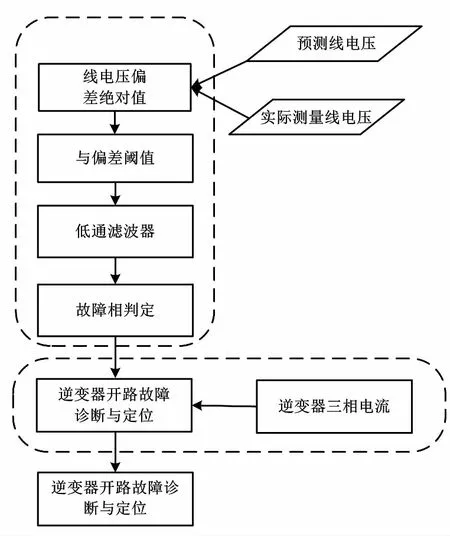
圖4 逆變器開路故障診斷方法總體方案
根據逆變器線電壓在功率開關管出現開路故障的情況下各相之間線電壓的變化特點,提出基于線電壓變化的故障相檢測與定位方法。在基于電壓變化分析的基礎上,檢測出故障相。接著,分析逆變器電流變化特點,提出基于電流的額外的診斷變量,利用電流診斷量進行最終的故障定位。
2.1 基于線電壓的故障相檢測與定位
線電壓測量如圖5所示。由圖5可以看出,只用兩個傳感器測量得到的電壓為Um12、Um23。其中,第三個電壓Um31可以通過測量的Um12、Um23計算得到。
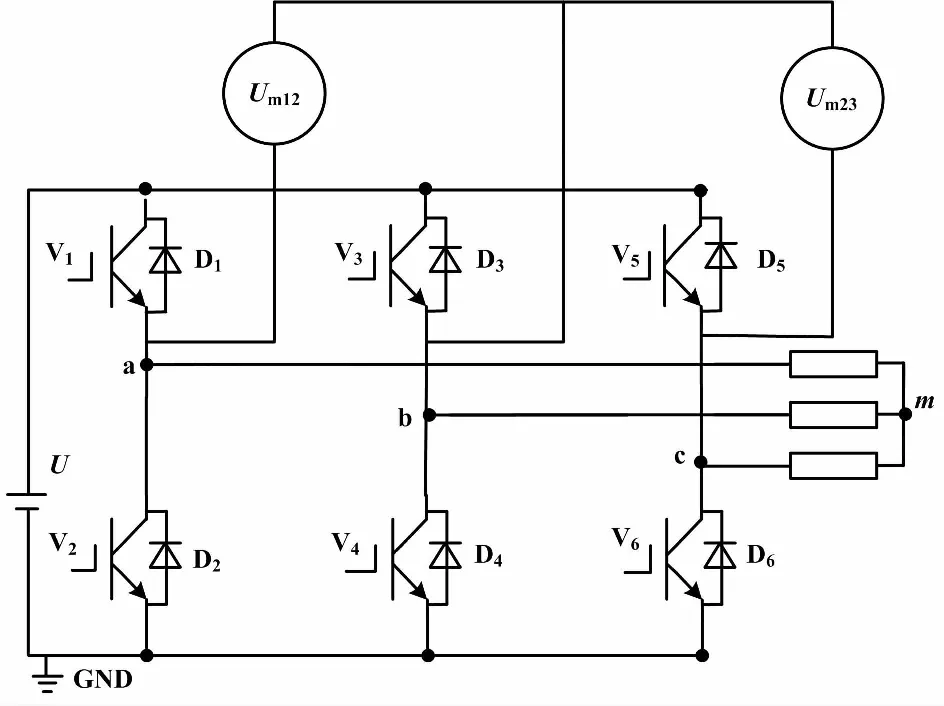
圖5 線電壓測量示意圖
故障診斷所需要的預測電壓可根據逆變器運行原理計算得到,計算式如式(1)所示。
(1)
式中:e1、e3、e5為逆變器開關管驅動變量,即每個橋臂上開關管的控制信號,其值為0或者1,若為1表明開關管被打開,反之則表明開關管被關閉;U12es、U23es、U31es為線電壓預測值。
整個診斷系統由故障檢測模塊和故障識別模塊組成。故障相檢測定位如圖6所示。三個故障檢測模塊分別為FD12、FD23、FD31。它們分別針對a相、b相、c相,輸入直流電壓Udc、開關管控制信號以及測量的電壓信號,最終將得到的信號輸出到故障識別模塊。故障檢測模塊僅負責各相開路故障的檢測。故障識別模塊的作用是定位故障相位置。
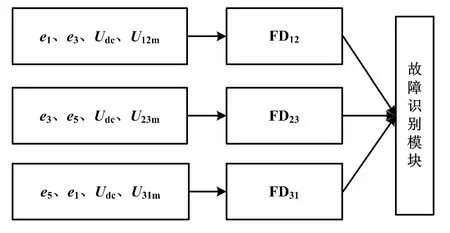
圖6 故障相檢測定位框圖
故障檢測模塊FD12內部結構如圖7所示。
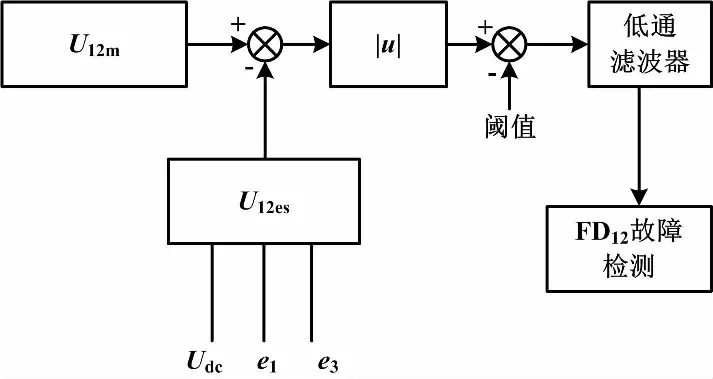
圖7 故障檢測模塊FD12內部結構
另外兩相的故障檢測模塊FD23、FD31與FD12的結構一致。首先,利用逆變器運行原理,結合直流輸入Udc以及開關管控制信號e1、e3,預測兩相之間的電壓。然后,將預測電壓和測量電壓作比較,得到差值u。將差值u和定義好的故障閾值作比較,并將比較結果輸入低通濾波器消除干擾帶誤差。和傳統的逆變器開路故障診斷方法不同的是,本文提出的故障檢測模塊不僅設置了偏差大小閾值,還利用低通濾波器消除干擾以及誤差。低通濾波器消除了在非故障情況下由于死區和開關開通關斷延時等因素造成的誤診斷現象,提高了可靠性。
故障識別模塊結構如圖8所示。由圖8可以看出,它的輸入為故障檢測模塊得到的輸出。根據分析易知,一旦逆變器某一相的開關管發生了開路故障,將會影響相鄰兩相的測點電壓數值,使兩個故障檢測模塊同時出現故障信號。
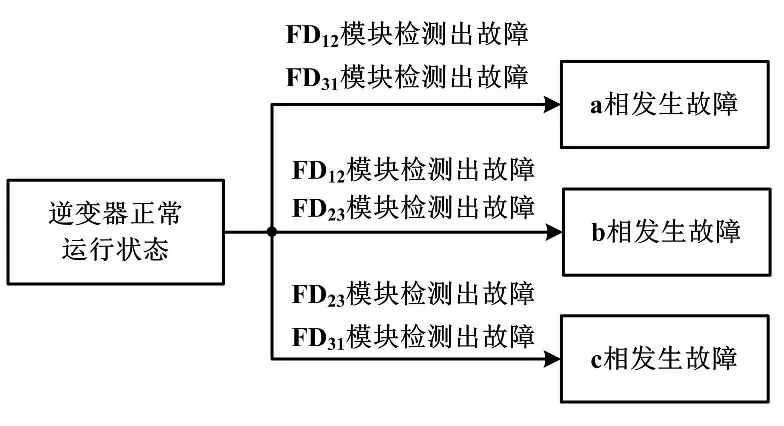
圖8 故障識別模塊結構圖
進一步將各相故障標志信號定義為:
(2)
2.2 基于電流診斷變量的故障開關管定位
為了診斷出哪一相發生了開路故障并定位逆變器故障開關管,提出了根據電流變化特點的診斷變量進行逆變器開路故障開關管定位的方法。首先,給出三相電壓源逆變器(voltage source inverter,VSI)的診斷變量:
(3)
(4)
式中:n為三相橋臂,n=a、b、c;T為電流周期;〈in〉為取電流平均值;Ln(t)為診斷變量。
由式(4)可以看出,所定義的故障定位變量是基于周期平均電流量的。有了診斷變量L并不能完成定位,還需定義診斷變量P。診斷變量P定義如式(5)所示。
(5)
式中:n為三相橋臂,n=a、b、c;k為閥值。
在診斷出哪一相發生故障后,利用診斷變量P進行橋臂開關管故障定位。然后,可根據診斷變量P的大小判斷出故障點。
3 試驗結果分析
使用MATLAB/Simulink軟件搭建仿真模型,對故障診斷方法進行仿真驗證。以a相橋臂下開關管開路故障為例進行分析。圖9為故障前后線電壓uab的波形。由仿真波形可以看出,在0.315 s發生故障后,線電壓uab產生了畸變,其波形的特點是周期性出現畸變。
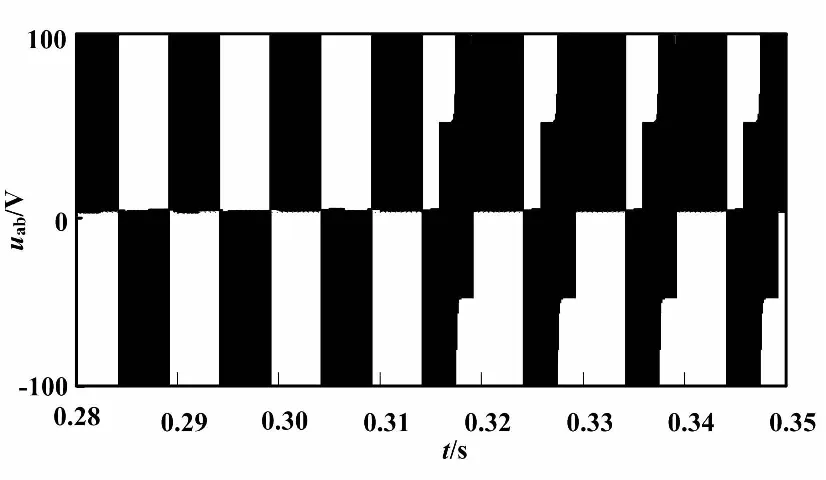
圖9 故障前后線電壓uab的波形
圖10為故障前后線電壓ubc的波形。由仿真波形可以看出,在0.315 s發生故障后,線電壓ubc并沒有產生畸變,說明開關管的故障并沒有影響到線電壓ubc。
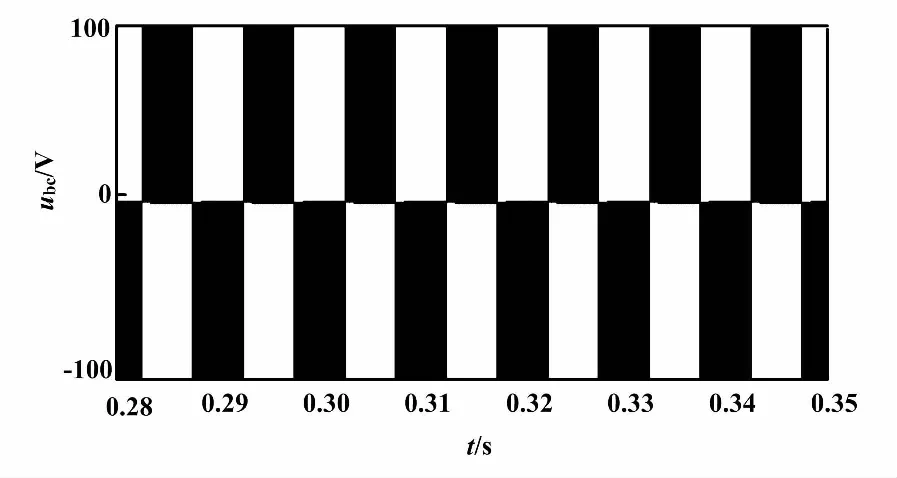
圖10 故障前后線電壓ubc的波形
圖11為故障前后線電壓uca的波形。由仿真波形可以看出,在0.315 s發生故障后,線電壓uca產生了畸變,并且波形的特點是周期性出現畸變。
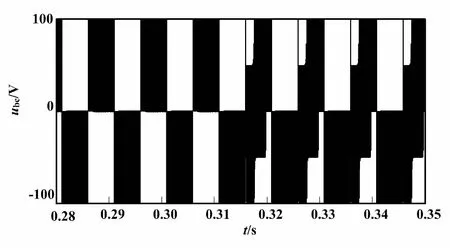
圖11 故障前后線電壓uca的波形
圖12為逆變器診斷信號f12波形。由圖12可以看出,在0.315 s發生故障后,f12發生突變,表明出現故障。
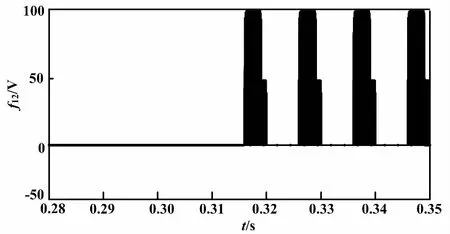
圖12 逆變器診斷信號f12波形
圖13為逆變器診斷信號f23波形。由圖13可以看出,在0.315 s發生故障后,f23并未發生變化,V1發生開路故障并沒有影響到診斷檢測模塊FD23,和上文分析一致。
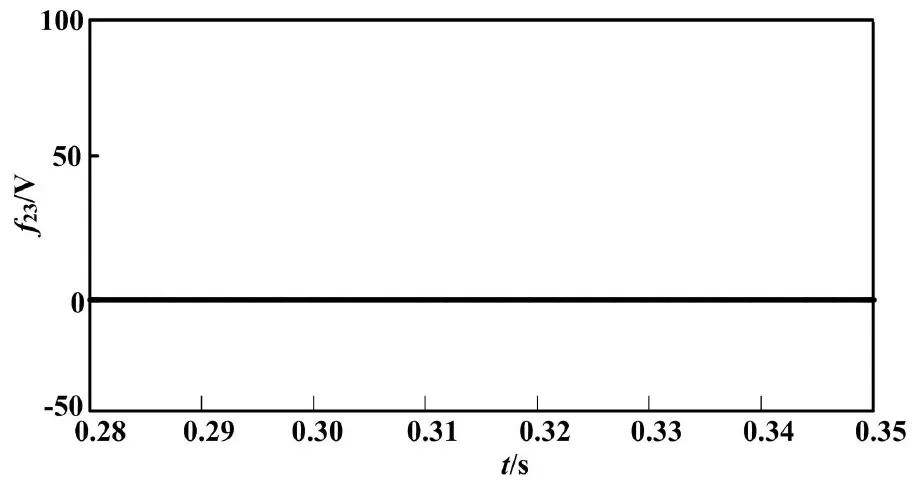
圖13 逆變器診斷信號f23波形
圖14為逆變器診斷信號f31波形。由圖14可以看出,在0.315 s發生故障后,f31發生突變,表明出現故障。
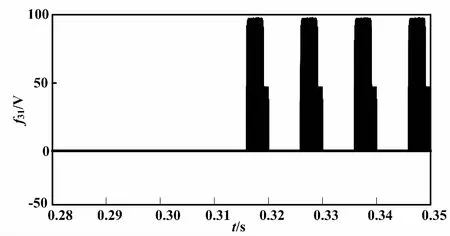
圖14 逆變器診斷信號f31波形
圖15為逆變器故障標志信號Wa波形。由圖15可以看出,在0.315 s發生故障后,Wa發生突變,其值由0變為1,表明a相出現故障。這是因為波形f31和波形f12都大于閾值,根據式(2),a相發生故障,Wa值突變為1。
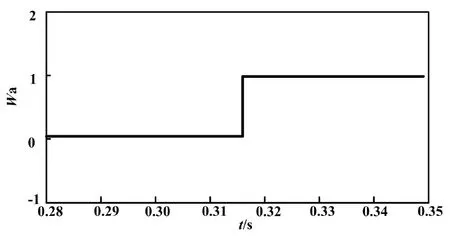
圖15 逆變器故障標志信號Wa波形
圖16為逆變器故障分析變量La波形。由圖16可以看出,在0.315 s發生故障后,La發生突變,其值由0變為接近1的值,并且大于閾值k。

圖16 逆變器故障分析變量La波形
圖17為逆變器故障信號Pa波形。由圖17可以看出,在0.315 s發生故障后,Pa發生突變,其值由0變為1。根據上文對診斷變量Pa的分析,可推斷出V2出現了開路故障。
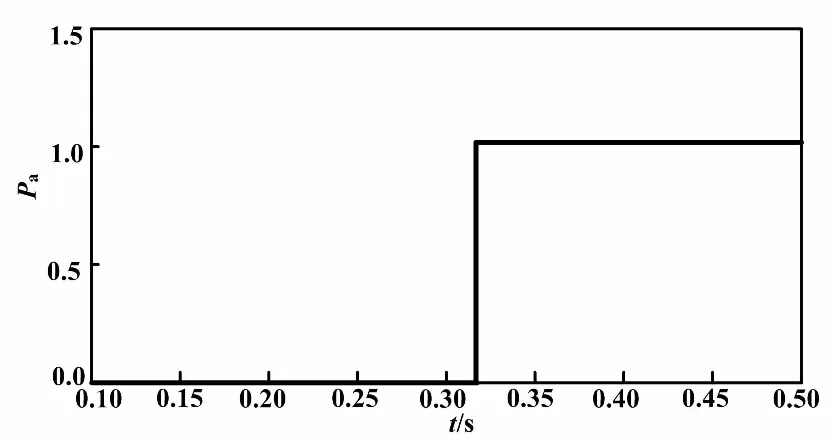
圖17 逆變器故障信號Pa波形
4 結論
本文提出的基于電量參數特征分析的逆變器開路故障診斷方法,在保留基于電壓信號的逆變器開路故障診斷方法的優越性的同時,克服了基于電流信號的逆變器開路故障診斷方法的可靠性低的缺陷。首先,分析了光伏逆變器在故障前線電壓的變化特點;接著,提出了逆變器故障檢測模塊與故障識別模塊;最后,提出了使用電流診斷變量進行開路故障開關管的定位。仿真試驗證明了本文提出的診斷方法的有效性。該診斷方法可以減少由于逆變器開路故障帶來的損失,能夠在一定程度上提高電力、電動汽車、核電、航天等行業的安全性和可靠性。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
汽車維修與保養(2019年7期)2020-01-06 03:30:42
電子制作(2018年11期)2018-08-04 03:25:42
汽車維護與修理(2016年10期)2016-07-10 08:17:41
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
重慶工商大學學報(自然科學版)(2015年10期)2015-12-28 07:43:58
汽車維修與保養(2015年6期)2015-04-17 03:31:50
汽車維護與修理(2015年2期)2015-02-28 12:15:39
振動、測試與診斷(2014年5期)2014-03-01 01:14:21
