一種改進(jìn)720°全景相機(jī)底部圖像拼接方法
2021-10-15 07:17:54徐一帆王新華王少鑫李明達(dá)穆全全李大禹
液晶與顯示 2021年10期
徐一帆, 王新華, 張 廣, 王少鑫, 李明達(dá), 穆全全, 宣 麗, 李大禹*
(1. 中國(guó)科學(xué)院 長(zhǎng)春光學(xué)精密機(jī)械與物理研究所, 應(yīng)用光學(xué)國(guó)家重點(diǎn)實(shí)驗(yàn)室,吉林 長(zhǎng)春 130033;2. 中國(guó)科學(xué)院大學(xué),北京 100049; 3. 東北電力大學(xué) 計(jì)算機(jī)學(xué)院,吉林 吉林 132012;4. 吉林省農(nóng)村經(jīng)濟(jì)信息中心,吉林 長(zhǎng)春 130033)
1 引 言
虛擬現(xiàn)實(shí)是一種能讓使用者擁有沉浸式體驗(yàn)的技術(shù)。通過(guò)該技術(shù),用戶能在虛擬的場(chǎng)景中有現(xiàn)實(shí)般的體驗(yàn)。近年來(lái),虛擬現(xiàn)實(shí)技術(shù)快速發(fā)展,得到了廣泛應(yīng)用。在教育、宣傳展示、廣告、影視娛樂(lè)等領(lǐng)域,虛擬現(xiàn)實(shí)技術(shù)都得到了很好的應(yīng)用[1],展示了其優(yōu)點(diǎn)和巨大的應(yīng)用潛力。
全景相機(jī)是實(shí)現(xiàn)虛擬現(xiàn)實(shí)的重要工具之一,是能拍攝大角度、廣視場(chǎng)圖像的圖像采集設(shè)備。目前,已有很多廠商推出了全景相機(jī)設(shè)備。2015年,谷歌公司推出了由16個(gè)鏡頭組成的多鏡頭拼接式全景相機(jī)GoPro Odyssey。2016年,三星公司推出了雙魚(yú)眼鏡頭式全景相機(jī)gear 360。
720°全景相機(jī)是指能夠拍攝側(cè)面360°和上下360°全視角圖像的全景相機(jī)。其有拍攝視角大的優(yōu)點(diǎn)。但支架等遮擋物對(duì)其底部圖像的遮擋一直是720°全景相機(jī)的一個(gè)難以解決的問(wèn)題。該問(wèn)題導(dǎo)致采集到的全景圖像有遮擋,不完整。而有些應(yīng)用場(chǎng)景如記錄案發(fā)現(xiàn)場(chǎng)等對(duì)圖像完整性要求高,有些用戶希望得到更極致的宣傳效果或娛樂(lè)體驗(yàn),消除底部圖像中的遮擋,獲得完整的全景圖像對(duì)全景相機(jī)有很大的意義。
因此,本文設(shè)計(jì)一組可以分步拍攝的全景相機(jī),拍攝側(cè)面與頂部圖像后,在原處用魚(yú)眼鏡頭分兩次拍攝底部圖像。通過(guò)該方式,可以消除底部遮擋。但是,該方法需要分步拍攝,底部相機(jī)的拍攝時(shí)間與其他相機(jī)不同,受到光照變化等因素影響,底部相機(jī)采集到的圖像與其他相機(jī)采集到的圖像之間可能會(huì)有亮度、色彩的差異。全景相機(jī)不同、相機(jī)的拍攝角度不同,相機(jī)、鏡頭本身的特性不完全一致等原因也會(huì)造成這種差異。為了得到高清全景圖像,本文采用側(cè)面多鏡頭加頂部底部魚(yú)眼鏡頭的全景相機(jī)設(shè)計(jì)。該方案全景圖像清晰度較雙魚(yú)眼式全景相機(jī)更高,但會(huì)增大側(cè)面圖像與魚(yú)眼圖像的亮度、色彩差異。圖像之間的亮度、色彩的差異在合成全景圖像后會(huì)在全景圖像的拼接縫兩側(cè)出現(xiàn)明顯的亮度和色彩差異,會(huì)使拼接縫更加明顯,嚴(yán)重影響圖像美觀和視覺(jué)體驗(yàn)。因此,對(duì)底部圖像進(jìn)行勻色處理對(duì)提升全景圖像的圖像效果很有意義。
目前國(guó)內(nèi)外關(guān)于勻色算法的研究有很多。圖像的勻色算法主要包括Mask勻色算法、插值勻色法、Retinex算法、同態(tài)濾波勻色算法、Wallis勻色算法和直方圖匹配算法等[2-3]。2006年,李德仁等用Wallis變換對(duì)不同遙感影像進(jìn)行勻色[4],通過(guò)調(diào)整待處理圖像的均值和標(biāo)準(zhǔn)差,使之與參考圖像相應(yīng),提升了影像一致性。2016年,呂楠等針對(duì)全景圖像拼接過(guò)程中多幅圖像之間的亮度和色彩差異問(wèn)題,提出了一種多相機(jī)圖像拼接勻色算法[5]。該算法基于顏色空間轉(zhuǎn)換,將RGB空間的圖像轉(zhuǎn)換到Y(jié)CbCr空間,再通過(guò)顏色調(diào)節(jié)因子進(jìn)行調(diào)節(jié),優(yōu)化了全景圖像的顏色一致性。2019年,李爍等提出了基于圖像自適應(yīng)分塊的勻色算法[6]。該算法通過(guò)分塊計(jì)算參數(shù)和插值,避免了圖像勻色過(guò)程中出現(xiàn)的塊效應(yīng),提升了遙感影像的勻色效果。由于全景相機(jī)拍攝的景物有不同的區(qū)域,不同區(qū)域的反射光不同,在圖像中的色彩有較大差異。在對(duì)全景圖像進(jìn)行勻色的過(guò)程中,基于全局的勻色算法會(huì)導(dǎo)致不同區(qū)域的圖像互相影響,造成勻色結(jié)果的偏差,不能達(dá)到理想的勻色效果。
針對(duì)上述問(wèn)題,本文提出了一種基于分步拍攝的消除底部遮擋方法,通過(guò)側(cè)面和頂部一次拍攝和底部?jī)纱闻臄z消除底部遮擋,并提出了一種基于圖像分割的Wallis勻色算法調(diào)整全景圖像底部的亮度、色彩差異。經(jīng)實(shí)驗(yàn)驗(yàn)證,基于分步拍攝的消除底部遮擋方法效果良好,能夠較好地提升全景圖像的完整性和美觀度;基于圖像分割的Wallis勻色算法能夠較好地提升全景圖像亮度、色彩的一致性。
2 消除全景圖像底部遮擋
2.1 全景相機(jī)結(jié)構(gòu)
本文的全景相機(jī)主要分為3部分。如圖1所示,第一部分為側(cè)方及頂部成像部分,由10個(gè)朝向側(cè)方的相機(jī)、朝向頂部的魚(yú)眼相機(jī)和支架組成;如圖2所示,第二部分為底部成像部分,由朝向底部的魚(yú)眼相機(jī)和支架組成;第三部分為數(shù)據(jù)處理部分,由數(shù)據(jù)傳輸線、磁盤(pán)陣列、計(jì)算機(jī)組成,能夠傳輸、存儲(chǔ)和處理圖像。

圖1 全景相機(jī)側(cè)面及頂部成像部分Fig.1 Side and top imaging part of the panoramic camera

圖2 全景相機(jī)底部成像部分Fig.2 Bottom imaging part of the panoramic camera
為拍攝出完整的720°全景圖像,使用該全景相機(jī)采集圖像的過(guò)程包括以下步驟:先使用側(cè)方及頂部成像部分進(jìn)行一次拍攝,得到側(cè)面及頂部的圖像;再撤走側(cè)方及頂部成像部分,在原處擺放底部成像部分,進(jìn)行一次拍攝;最后移動(dòng)底部成像部分,使魚(yú)眼鏡頭位置不變,支架在與之前位置相反的另一側(cè),再進(jìn)行一次拍攝。通過(guò)這種方式,采集到10張側(cè)面圖像,1張頂部魚(yú)眼圖像和2張底部魚(yú)眼圖像,可以用采集到的兩張底部圖像消除底部遮擋,獲得完整的全景圖像。
2.2 全景圖像拼接算法
為合成完整的全景圖像,全景圖像合成的過(guò)程包括:將10張側(cè)面圖像拼接成側(cè)面全景圖像;利用兩張底部圖像拼接出完整的底部圖像;將底部圖像、頂部圖像與側(cè)面全景圖像拼接,生成720°全景圖像。本文所用的圖像拼接算法包括基于特征點(diǎn)的圖像匹配、光流法、圖像融合等步驟。
2.2.1 圖像匹配
為實(shí)現(xiàn)圖像的匹配,首先提取待拼接圖像的特征點(diǎn)[7-10],再建立變換矩陣,用隨機(jī)樣本一致(RANSAC)算法剔除誤匹配點(diǎn)[11],計(jì)算出最佳變換矩陣,最后將圖像變形后匹配。圖3為圖像匹配實(shí)例圖。
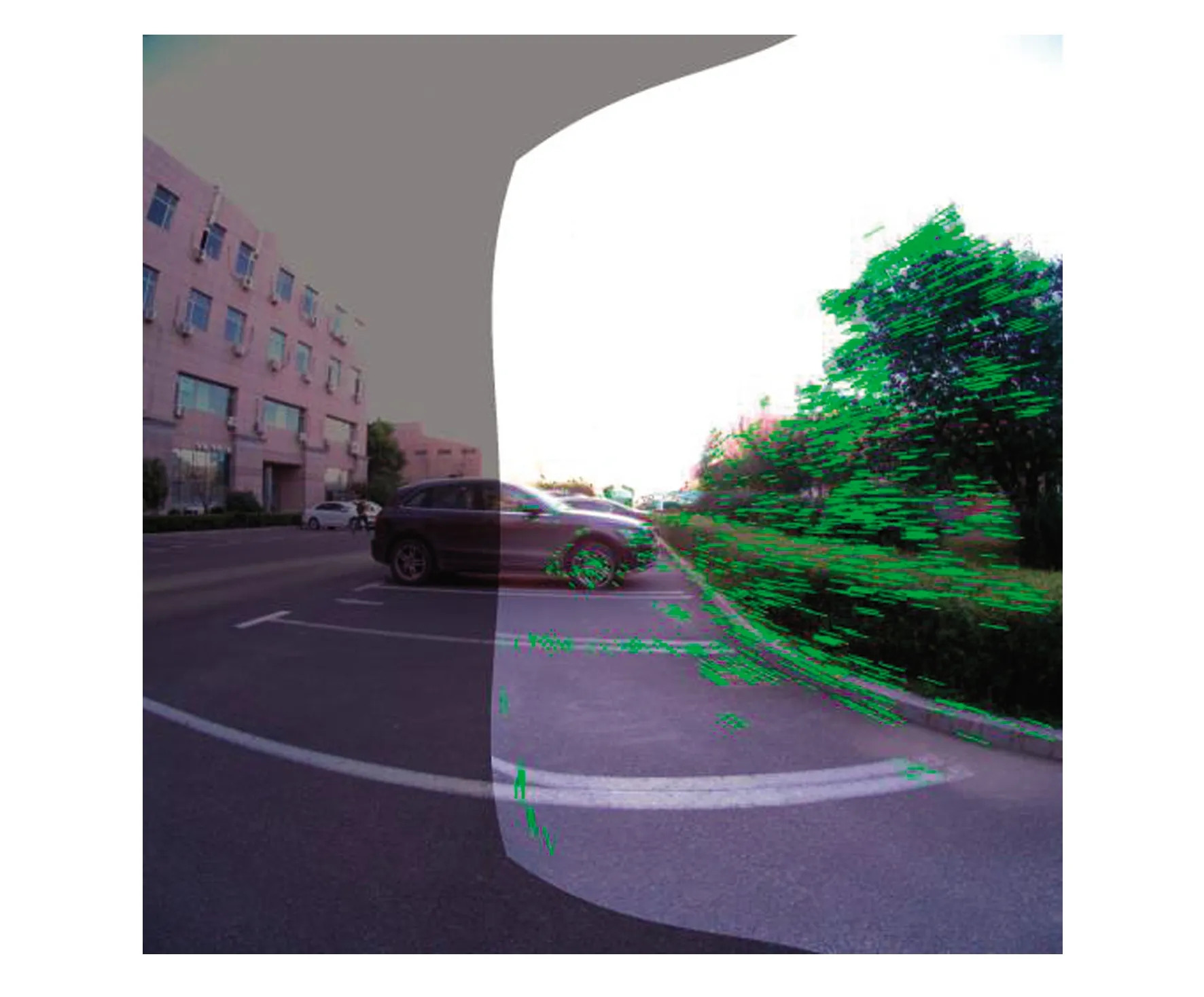
圖3 圖像匹配實(shí)例圖Fig.3 Image matching example diagram
2.2.2 光流法
光流法[12-13]是一種計(jì)算圖像之間像素運(yùn)動(dòng)的算法。像素從一張圖像上的位置到下一張圖像上位置的向量被稱為光流。圖像區(qū)域內(nèi)所有像素的光流稱為光流場(chǎng)。使用該方法須滿足亮度恒定、空間一致、像素位移較小等條件。用基于特征點(diǎn)的圖像匹配方法進(jìn)行匹配后,再用光流法進(jìn)行拼接,可以生成雙目全景圖像,還可以使圖像拼接更自然流暢。
采用基于圖像塊匹配的光流計(jì)算方法。對(duì)于在一張圖像上像素點(diǎn),選取以它為中心的圖像塊,在另一張圖像尋找相匹配的圖像塊。定義一個(gè)損失函數(shù)以估計(jì)兩個(gè)圖像塊之間的匹配程度,以損失最小的圖像塊作為相匹配的圖形塊。以相匹配圖像塊之間的位移作為該點(diǎn)的光流矢量。由此得到光流場(chǎng)。為增加光流計(jì)算過(guò)程的穩(wěn)定性,通常使用多尺寸金字塔結(jié)構(gòu)。對(duì)原圖多次下采樣,得到尺寸更小的圖像,在原圖中較大的位移在多尺寸金字塔的上層變?yōu)樾∥灰啤T谏弦粚铀愕霉饬骱螅艘韵禂?shù),在下一層調(diào)整,獲得精確的光流量。
生成全景圖像,需要得到每個(gè)視角下的圖像。但是只拍攝了10個(gè)真實(shí)視角的圖像,因此,須在每個(gè)角度插值出一個(gè)該視角的像素列。計(jì)算從左右兩個(gè)不同視角拍攝圖像的重合區(qū)域的光流場(chǎng)。通過(guò)該光流場(chǎng)對(duì)每個(gè)視角插值。可視像素運(yùn)動(dòng)與視角變化為線性關(guān)系,對(duì)視角β插值所用光流可用公式(1)計(jì)算:
(1)
其中:y′表示對(duì)視角β插值所用光流,y表示覆蓋視角β的兩張相鄰圖像間的光流,α0表示上一個(gè)真實(shí)視角,α1表示下一個(gè)真實(shí)視角。為達(dá)到雙目視覺(jué)效果,在生成左眼全景圖像和右眼全景圖像時(shí),分別增加一個(gè)向左的偏移量和一個(gè)向右的偏移量。用該光流對(duì)光流起始圖像變形即可得到視角β下的插值像素列。
2.2.3 圖像融合
圖像融合是實(shí)現(xiàn)拼接圖像過(guò)渡更流暢的圖像處理方法。常見(jiàn)的圖像融合算法有平均融合、加權(quán)平均融合、漸入漸出融合等[14]。加權(quán)平均融合即在重疊區(qū)域,以兩張圖像像素灰度值的加權(quán)平均值作為拼接后圖像的像素灰度值[15]。如公式(2)所示:

(2)
式中:f′(x,y)表示圖像融合的目標(biāo)灰度值,f1(x,y)、f2(x,y)分別表示兩張圖像的灰度值,g1、g2分別表示兩張圖像的非重疊區(qū)域,g′表示待融合區(qū)域,α為權(quán)重系數(shù)。其當(dāng)α=0.5時(shí)即為平均融合。漸入漸出融合即融合權(quán)重隨坐標(biāo)改變的融合方式,假設(shè)重疊區(qū)域坐標(biāo)為從x1到x2,則有:
(3)
本文采用漸入漸出融合方式進(jìn)行圖像融合。
2.2.4 底部圖像拼接
采集圖像后,得到了兩張帶有遮擋的全景圖像,遮擋區(qū)域分別在圖像的不同側(cè),如圖4所示。
對(duì)兩張圖像進(jìn)行圖像匹配。利用合適的掩膜刪去其中一張圖像的遮擋區(qū)域,拼接上另一張圖像的該區(qū)域,可以得到?jīng)]有遮擋的底部圖像,如圖5所示。
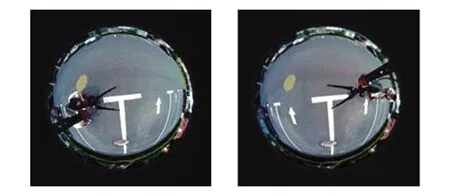
圖4 底部圖像Fig.4 Bottom image

圖5 消除遮擋后的底部圖像Fig.5 Bottom image after removing the occlusion
3 勻色算法
3.1 Wallis勻色算法
Wallis勻色法是一種相鄰圖像勻色方法,通過(guò)將待處理圖像的灰度值均值和標(biāo)準(zhǔn)差向參考圖像調(diào)整,實(shí)現(xiàn)拼接圖像色彩均勻,過(guò)渡流暢,如公式(4)所示:

(4)
式中:g(x,y)表示待處理圖像的像素灰度值;f(x,y)表示處理后的像素灰度值;mg表示待處理圖像的灰度值均值;mf表示參考圖像的灰度值均值;sg表示待處理圖像的灰度值標(biāo)準(zhǔn)差;sf表示參考圖像的灰度值標(biāo)準(zhǔn)差;b表示亮度系數(shù),b∈[0,1];c表示方差拓展系數(shù),c∈[0,1]。b取值從0到1表示將待處理圖像灰度值均值向參考圖像調(diào)整的程度;c取值1時(shí)表示將待處理圖像方差向參考圖像調(diào)整,取值越小,處理后圖像標(biāo)準(zhǔn)差越小。圖像勻色時(shí)一般希望將待處理圖像參數(shù)完全調(diào)整至與參考圖像相符。b、c取值為1時(shí)最接近實(shí)現(xiàn)這一目的。因此,通常情況下,b和c的值取1,則式(4)變?yōu)椋?/p>
(5)
3.2 區(qū)域生長(zhǎng)法
圖像分割是一種將圖像按照特征分割成不同區(qū)域的過(guò)程。本文采用區(qū)域生長(zhǎng)法[16]進(jìn)行圖像分割。區(qū)域生長(zhǎng)法是一種根據(jù)鄰域相似程度進(jìn)行分割的圖像分割方法,能夠分割出圖像中具有相同或相似特征的區(qū)域。在圖像特征沒(méi)有已知規(guī)律可以參考的情況下,其較其他方法經(jīng)常有更優(yōu)的效果。
區(qū)域生長(zhǎng)算法的基本思想是從種子點(diǎn)開(kāi)始,通過(guò)生長(zhǎng)準(zhǔn)則評(píng)判種子點(diǎn)和鄰域中的點(diǎn)是否性質(zhì)相近來(lái)擴(kuò)大區(qū)域[17]。如圖6所示,區(qū)域生長(zhǎng)法的一般步驟為:第一步選定種子點(diǎn),令種子點(diǎn)屬于集合P;第二步判斷種子點(diǎn)鄰域中的點(diǎn)是否符合生長(zhǎng)規(guī)則,令符合的點(diǎn)為新種子點(diǎn),并納入集合P,再根據(jù)生長(zhǎng)規(guī)則對(duì)新種子點(diǎn)鄰域中不屬于集合P的點(diǎn)進(jìn)行判定;重復(fù)步驟二直至生長(zhǎng)停止,集合P即為分割出的一片圖像區(qū)域。
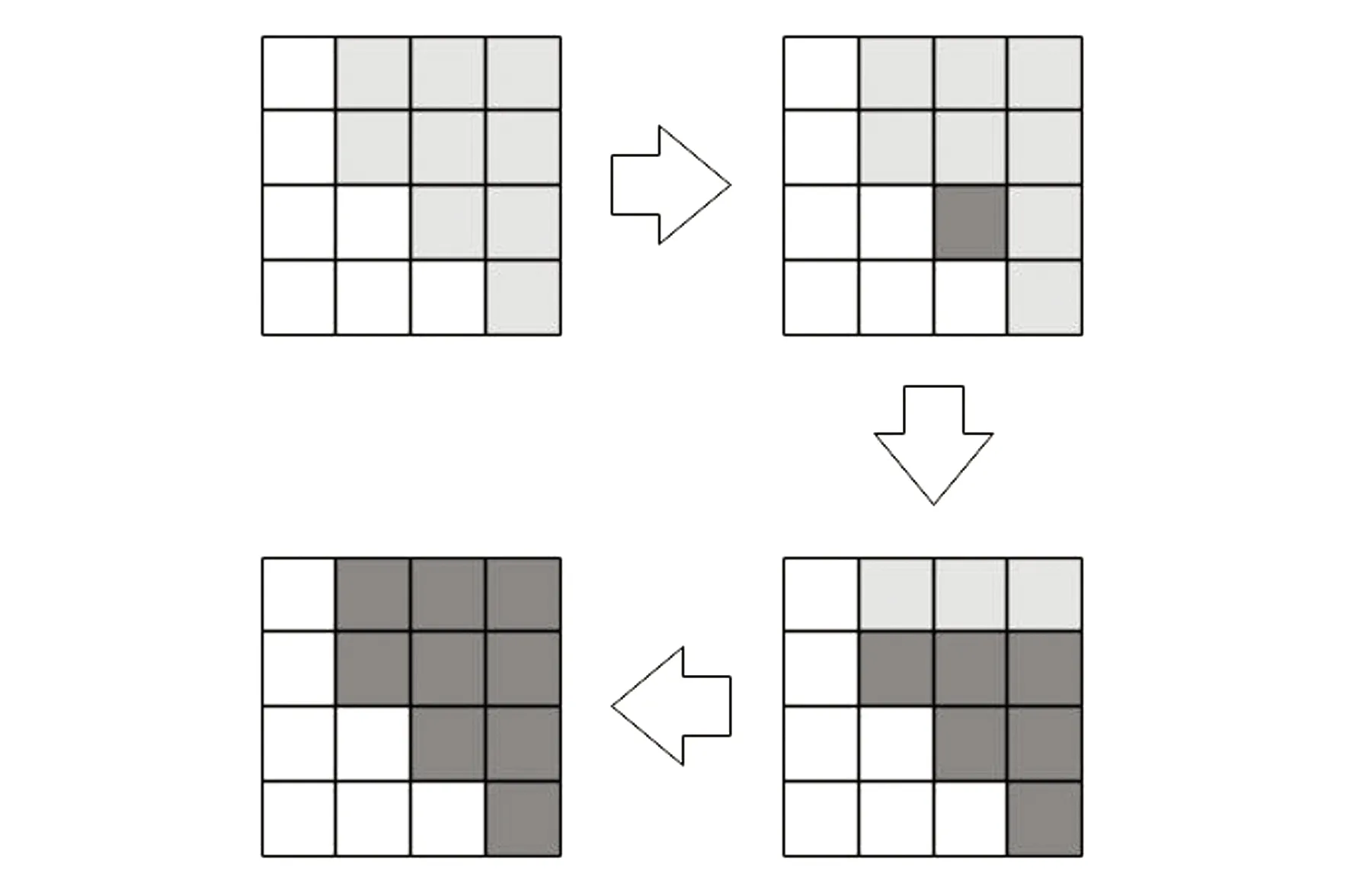
圖6 區(qū)域生長(zhǎng)法示意圖Fig.6 Schematic diagram of regional growth method
3.3 基于圖像分割的勻色
基于全局的勻色算法會(huì)導(dǎo)致圖像中差異較大的區(qū)域互相影響,造成勻色結(jié)果出現(xiàn)偏差。本文針對(duì)這一問(wèn)題提出了一種基于圖像分割的勻色算法。將圖像分割成不同的區(qū)域,分別進(jìn)行勻色。
用區(qū)域生長(zhǎng)法對(duì)待處理圖像和參考圖像進(jìn)行圖像分割。為減少高頻信息造成的分割結(jié)果的空洞,圖像分割時(shí)先對(duì)圖像進(jìn)行中值濾波以使圖像平滑。將分割結(jié)果作為模板,用Wallis勻色算法在LAB顏色空間對(duì)兩張圖像中的相應(yīng)區(qū)域進(jìn)行勻色。
4 實(shí)驗(yàn)結(jié)果分析
本文對(duì)基于分步拍攝的消除720°全景相機(jī)底部圖像遮擋的方法進(jìn)行了實(shí)驗(yàn)。實(shí)驗(yàn)用相機(jī)為PointGrey工業(yè)相機(jī),相機(jī)視場(chǎng)角為96°,圖像分辨率為2 048×2 048。圖7為待拼接圖像。圖8為沒(méi)有消除底部圖像遮擋的全景圖像。可以看出,底部圖像有較大的區(qū)域被遮擋,嚴(yán)重影響了圖像的完整性和美觀。圖9為使用本文基于分步拍攝消除底部遮擋方法得到的全景圖像。可以看出,圖像中沒(méi)有了底部被遮擋區(qū)域,圖像完整性和美觀程度有較大提升。
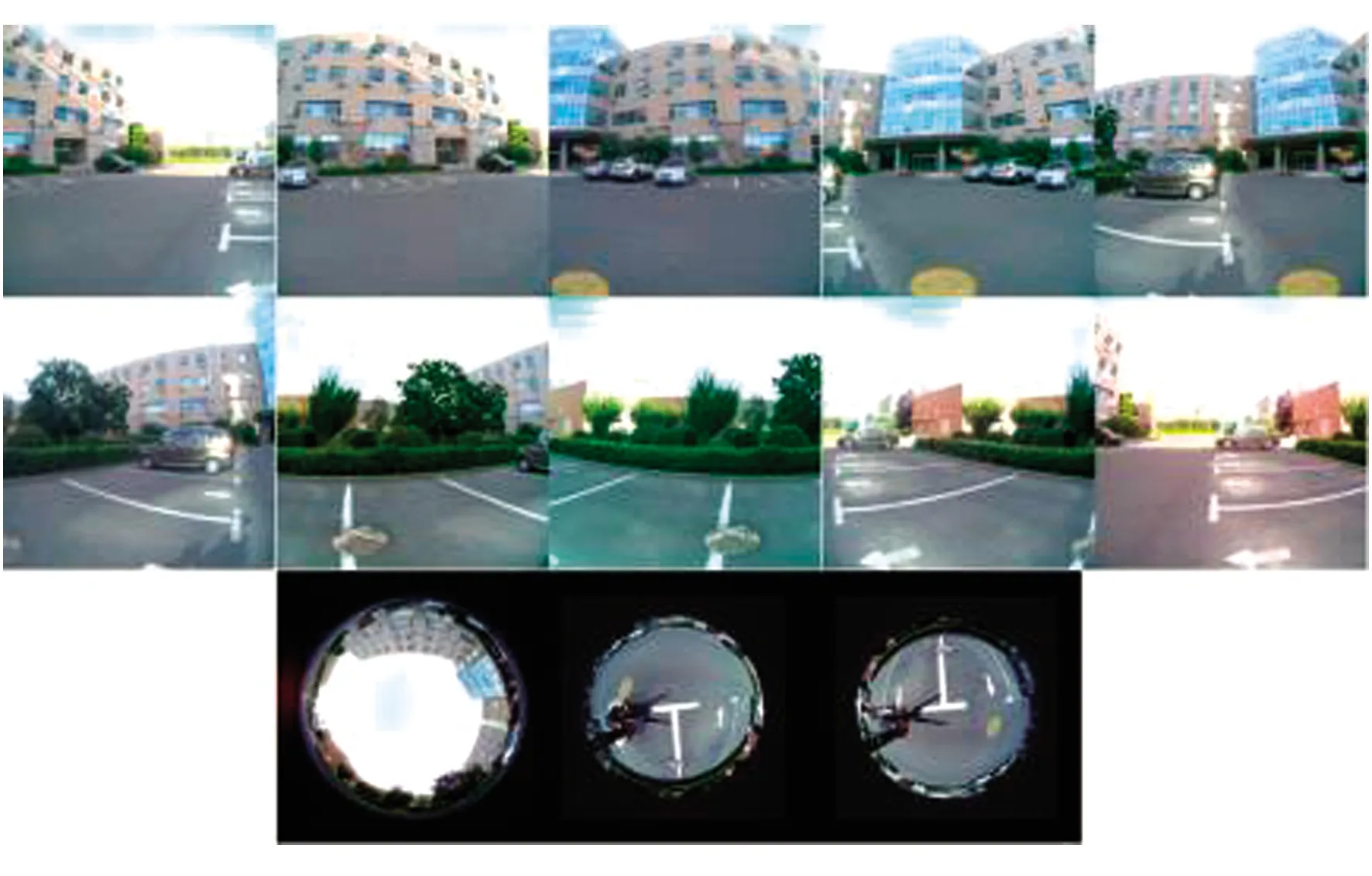
圖7 待拼接圖像Fig.7 Image to be stitched

圖8 未消除遮擋的全景圖像Fig.8 Panoramic image without occlusion removed

圖9 消除遮擋的全景圖像Fig.9 Panoramic image with occlusion removed
本文對(duì)基于圖像分割的勻色算法進(jìn)行了實(shí)驗(yàn)驗(yàn)證。實(shí)驗(yàn)所用的計(jì)算機(jī)處理器為inter(R) Core(TM) i5-7300HQ,操作系統(tǒng)為Windows10,開(kāi)發(fā)環(huán)境為Python3.7,使用了開(kāi)源庫(kù)Opencv3.4。圖10是未勻色的圖像,圖11是使用基于全局的Wallis勻色方法得到的結(jié)果,圖12是使用本文勻色方法得到的結(jié)果。可以看出,未經(jīng)勻色處理的全景圖像,其圖像底部與其他區(qū)域有明顯的亮度、色彩差異。本文的勻色算法對(duì)提高全景圖像底部與其他區(qū)域的一致性有效,效果較基于全局的勻色算法有所提升。

圖10 未勻色的全景圖像Fig.10 Unprocessed panoramic image

圖11 基于全局的勻色結(jié)果Fig.11 Results based on the global approach

圖12 本文算法的勻色結(jié)果Fig.12 Results of the algorithm in this article
在底部圖像和側(cè)面圖像的重疊區(qū)域隨機(jī)選取若干組相應(yīng)的圖像塊,尺寸為100×100像素。用相應(yīng)圖像塊的灰度值差異評(píng)價(jià)勻色效果,如公式(6)、(7)所示:
(6)
Δmi=|m1i-m2i|,
(7)
式中:m1和m2分別表示兩個(gè)相應(yīng)圖像塊的均值;i表示通道;Δmi表示該通道的灰度均值差;Δm為Δmi的均方根,用來(lái)評(píng)價(jià)勻色效果。選取10組圖像塊,計(jì)算其均值,結(jié)果如表1所示。

表1 勻色效果定量評(píng)價(jià)Tab.1 Quantitative effect evaluation
使用本文方法勻色的圖像較未勻色圖像差異減小74.5%,較使用全局勻色方法勻色的圖像差異減小59.3%。
5 結(jié) 論
本文針對(duì)720°全景相機(jī)底部圖像存在遮擋的問(wèn)題。提出了一種通過(guò)底部相機(jī)分步拍攝消除遮擋的方法。并針對(duì)底部相機(jī)分步拍攝可能造成的圖像亮度、色彩不一致的問(wèn)題,提出了一種基于圖像分割的Wallis勻色算法。定量分析結(jié)果表明,使用本文算法勻色,圖像顏色差異較使用基于全局算法減小59.3%。實(shí)驗(yàn)證明,本文提出的分步拍攝消除全景圖像底部遮擋的方法效果良好,能夠較好地提升全景圖像的完整性和美觀度;提出的基于圖像分割的Wallis勻色算法能夠較好地提升全景圖像亮度、色彩的一致性。
猜你喜歡
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
今日農(nóng)業(yè)(2021年19期)2022-01-12 06:16:36
今日農(nóng)業(yè)(2021年9期)2021-11-26 07:41:24
中老年保健(2021年11期)2021-08-22 03:15:44
發(fā)明與創(chuàng)新·小學(xué)生(2021年3期)2021-03-25 11:48:49
中學(xué)生數(shù)理化(高中版.高考數(shù)學(xué))(2021年1期)2021-03-19 08:28:38
無(wú)線電工程(2020年11期)2020-10-29 01:25:46
現(xiàn)代出版(2020年3期)2020-06-20 07:10:34
中國(guó)科技博覽(2016年2期)2016-04-25 20:32:39
小學(xué)生導(dǎo)刊(2016年34期)2016-04-11 00:49:44