基于全光纖Fabry–Perot干涉的差分測振系統設計
2021-10-17 08:15:52梁洪衛劉冬冬闞玲玲
工程科學與技術 2021年5期
梁洪衛,劉冬冬,闞玲玲,蘇 皓
(東北石油大學 電氣信息工程學院,黑龍江 大慶 163318)
與傳統的光學測量方法相比,光學測量技術是指采用光纖作為介質的光纖傳感器,通過測量光波特性參量的變化來獲得待測信息,它是一種重要的測量手段,具有非接觸式,傳輸信號損耗較少的特點。光纖F–P干涉儀具有體積小、質輕、抗強磁場、能夠波分無用、價格合適的特點,被廣泛應用于測量絕對距離[1–3]、位移[4–6]、振動[7]、應變[8–10]以及溫度[10–11]等參數。
為了提高測振儀的精度,近年來眾多學者做了大量的研究。Gamgopadhyay等[12]設計了一種基于光纖外腔式的F–P干涉振動傳感器的結構,通過測量相位的改變來完成探測外界振動。Zhang等[13]利用光纖內部的正交偏振光實現解調,并采用共光路的形式監測環境影響,同時引入聲光調制器(acousto-optic modulator,AOM)提高待測信號質量,但是,引入AOM增大了系統的測量成本。Pullteap等[14]利用傳感臂產生兩個正交信號,實現信號0.7~140.0 μm的動態測量,目的是獲取正切相位,進而解調出振動位移。Li等[15]通過調節半導體閾值電流使兩路光電探測器(PD)信號相位相反,增強信號質量,消除一定的環境干擾,達到平衡檢測的目的,然而,半導體光路易受電磁環境的影響。Zhang等[16]引入AOM進行差分的外差干涉,通過雙路共用一個AOM有效抑制零點漂移情況,但增大了成本。Qi等[17]使用偏振分光鏡(polarization beam splitter,PBS)及波片搭建了相位相反的空間光路結構,有效抑制了噪聲對干涉信號的影響,然而,所搭建的空間光路時分立器件的結構光路準直過程較為復雜。此外,由于干涉臂中的光纖對環境干擾極其敏感,任何環境的擾動都會帶來相應的相位誤差;并且,如果對采集信號進行預處理濾波,容易導致丟失一些微小信息,增大重構誤差。
基于上述問題,本文提出了一種基于相位相反結構的全光纖干涉振動測量系統。該系統利用光纖耦合器構造中兩臂光電探測器輸出信號相位相反的特點,將兩路信號進行差分處理,借此增強信號質量,降低共模噪聲對干涉信號的影響,提高待測信號的信噪比,使該儀器更適合于大噪聲下的位移振動測量;并且,該系統采用全光纖器件,更適合在強磁強腐蝕的環境中傳輸干涉信號,易校準光路。
1 差分系統的構成
1.1 F–P干涉的理論分析
光纖F–P干涉儀能夠在一根根光纖上實現多光束干涉傳感測量,在光纖傳輸過程中,空腔可由光纖端面和傳感物體表面構成并形成多次反射[18],具體如圖1所示。
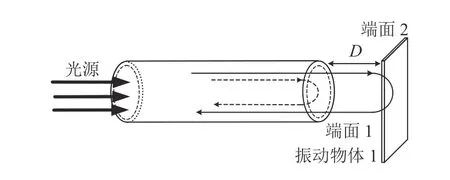
圖1 光纖F–P干涉原理圖Fig. 1 F–P interference schematic diagram
圖1中,當激光光源通過耦合器照射到振動物體表面時,由于光纖端面存在反射率(約4%),當系統穩定時,F–P干涉可以等效成雙光束干涉模型,那么,檢測到的輸出功率和相位可表示為[18–19]:
式中:I為光電探測器檢測到的功率;I0為初始功率;φs和φr分別為光初相和反射光相位;V為條紋深度;d為外腔變化量即外部振動物體位移變化;n為傳播介質的折射率,由于是空氣腔,故n=1;λ為激光的波長;θ為平行入射角, θ=0。
1.2 差分結構分析
在噪聲環境下,直接提取信號并進行重構會有很大的誤差;但如果對含噪信號進行濾波,濾波參數的選擇會影響干涉信號的波形,甚至導致一些細節信息削弱甚至消失[20];然而,差分只是減少了信號的共模噪聲,極大程度保留了信號信息,減少環境和光源擾動帶來的影響[21]。
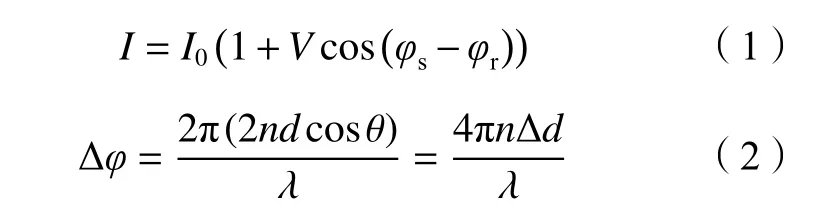
n×n單模耦合器可以概括成無損耗,對稱可逆網絡的2n端口,由于它的散射矩陣是酉矩陣可以證明2×2耦 合器的兩個輸出臂有π/2的相位差[22–23]。
當光源注入進光纖耦合器時,因為交叉耦合使得輸出端的直通臂和耦合臂存在π/2的相位變化。當干涉光再次進入耦合器時,依舊存在π/2的相位延遲,如圖2所示。
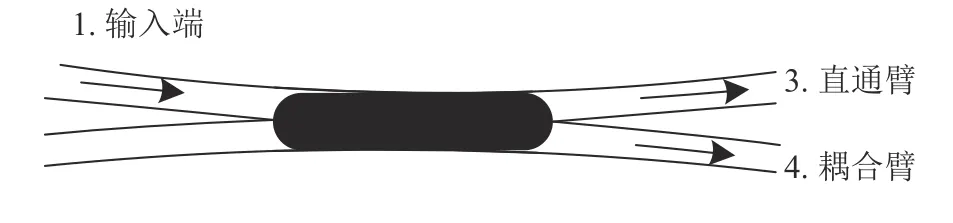
圖2 信號光延遲示意圖Fig. 2 Schematic diagram of signal optical delay
設激光器初始光強為E0:

如圖3所示,當入射光經過第1個3 dB耦合器C1,再進入直通臂和耦合臂時,兩束光的光強表示為:
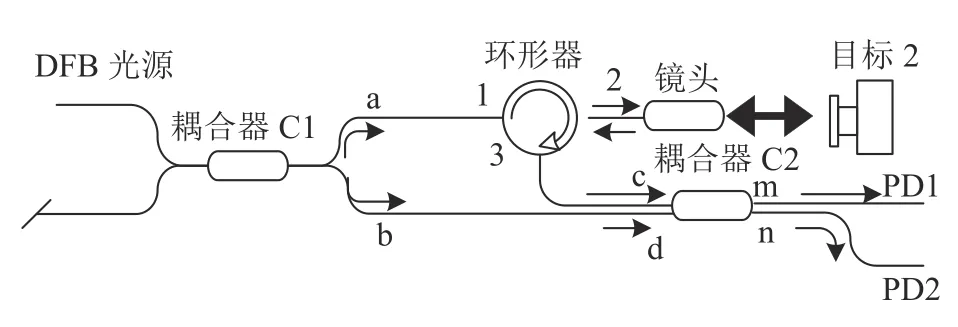
圖3 實驗原理圖Fig. 3 Experimental principle figure
當Ea進入環形器1口,順序傳輸至2口,照射到振動物體表面并形成穩定的F–P干涉后,傳輸至3口。由于環形器端口傳輸的不可逆性,干涉光并不能從3口傳回至1口而影響光源輸出,此時,耦合器C2的輸入端信號光強分別表示為:
經C2傳輸后,光強分別是:
經過合成,耦合器C2的兩個輸出功率表示如下:
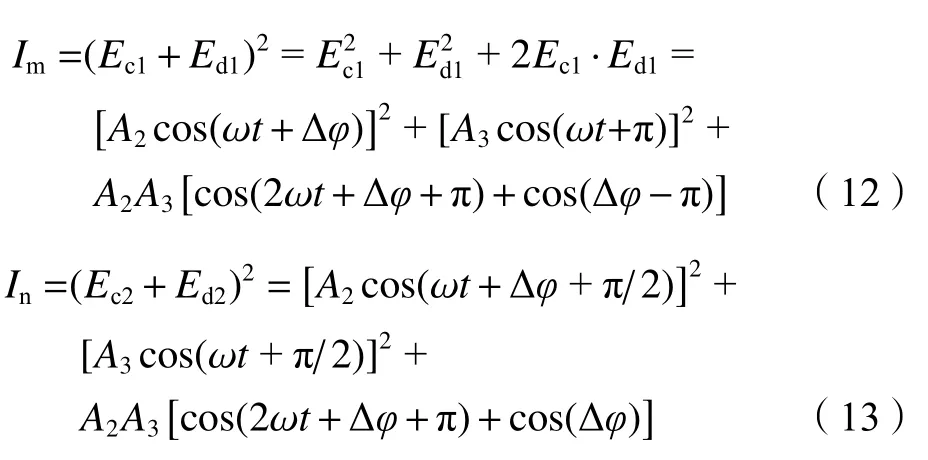
由于光的頻率過高,探測器并不能響應高頻部分,故式(12)、(13)可化簡為:

因此,探測器1和探測器2所采集到的信號功率差值I?為:

式中,A1、A2、A3、B1與 光強E0有關。
2 實驗及結果分析
為了進一步證明所提系統的有效性,按照圖3結構搭建實驗裝置,在鏡面反射和粗糙面反射兩種情況下進行振動位移測量實驗。該裝置由1個分布式光纖激光器(distributed feedback,DFB,其內置隔離器)、兩個3 dB光纖耦合器、1個三端口環形器、兩個光電探測器(PD1和PD2)、1個壓電陶瓷振動晶體(PZT)、1個數據采集卡(national instrument,NI,型號USB–4431)組成。
當DFB光源通過耦合器C1分成兩束光,一路,經環形器2口照射到PZT振動面并發生反射,在光纖端面與振動面之間形成F–P空腔并發生穩定干涉后,經環形器3端口傳輸至耦合器C2內;另一路,直接傳輸至耦合器C2。這兩束光在耦合器C2內混合后分別被PD1和PD2探測并轉為電壓信號被數據采集卡采集,之后,傳送到電腦進行后續差分信號處理。
用頻率為5 Hz、幅度為2 μm的PZT鏡面正弦運動模擬理想環境下的振動測量,其中,采樣頻率為50 kHz。
圖4展示了PZT正弦運動曲線、PD1和PD2采集的光強信號、其對應的差分處理信號。

圖4 鏡面干涉信號及后續相減所得的差分信號Fig. 4 Specular interference signals and differential signal obtained by subsequent subtraction
圖5展示了PD1、PD2、差分重構位移信號,以及對應的誤差分析。由圖5可知,經差分計算后的重構誤差減少了6 nm,且平均誤差減少了8 nm。
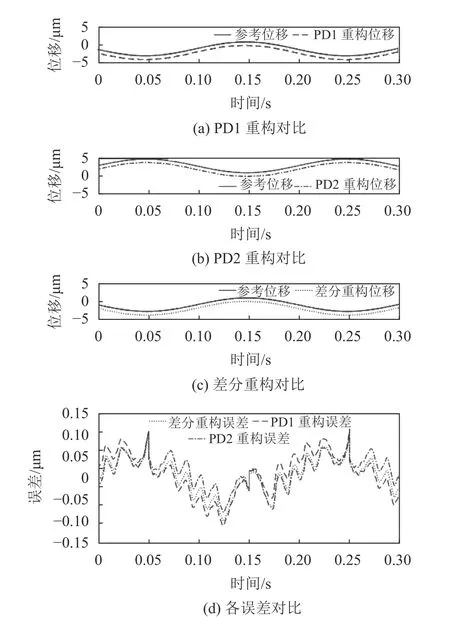
圖5 鏡面重構信號位移及其誤差Fig. 5 Signal displacements and error of mirror reconstruction
用3M反光貼紙代替鏡子,做頻率5 Hz、振幅1.4 μm的PZT粗糙面正弦運動,得到如圖6所示的粗糙面干涉信號。
圖6展示了PZT運動曲線、PD1和PD2采集的光強信號,以及對應的差分處理信號。圖7展示了PD1、PD2、差分信號的粗糙面位移重構信號,以及對應的誤差分析。
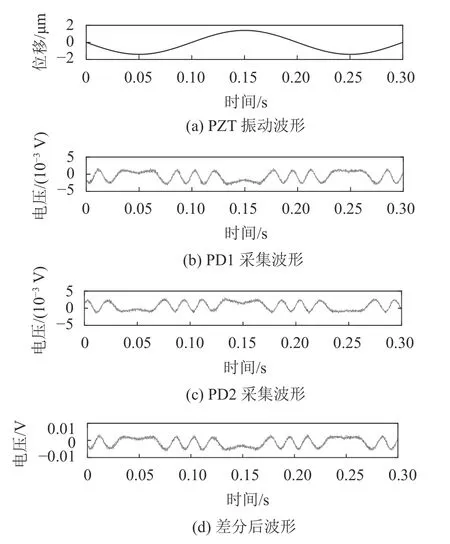
圖6 粗糙面下干涉信號及后續相減所得的差分信號Fig. 6 Interference signals under rough surface and differential signal obtained by subsequent subtraction
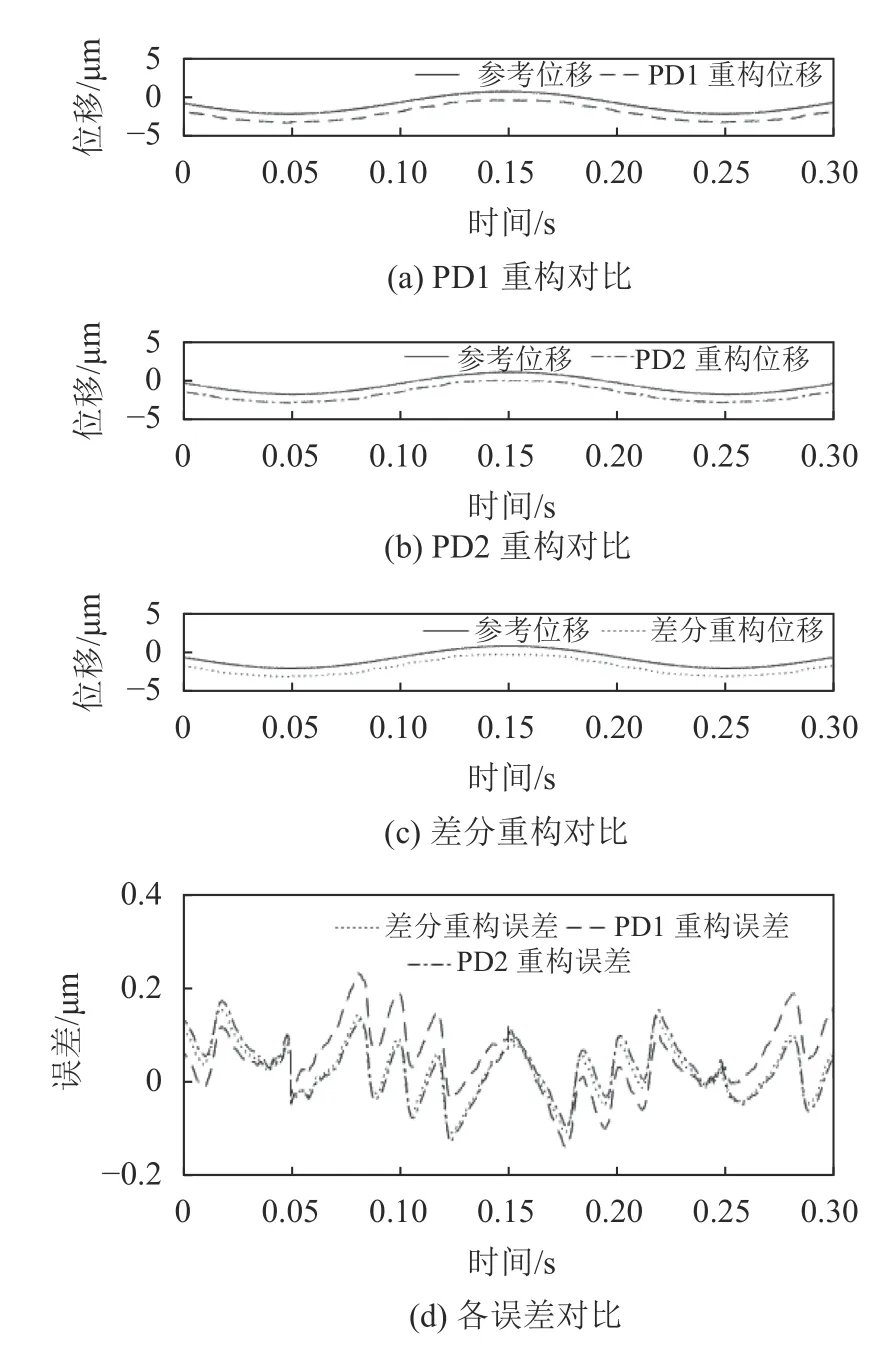
圖7 粗糙面重構信號位移及其誤差Fig. 7 Signal displacements and error of reconstructed rough surface
為了更直觀比較,將圖5和7中鏡面反射和粗糙面反射下重構的最大誤差、平均誤差結果進行對比,結果如表1所示。

表1 PD1、PD2及差分后平均誤差和最大絕對誤差對比Tab. 1 Comparison of mean error and maximum absolute error after PD1, PD2 and difference
由圖7和表1可知,差分的曲線波動較小更為平緩,更接近零點曲線,經計算重構的平均誤差降低了7 nm,最大誤差從原來的196 nm降低至156 nm。
3 結 論
本文提出了一種基于全光纖F–P測振消噪結構,利用光通過耦合器傳輸中產生的相位變化推導出結構中輸出兩臂信號相位相反,相減獲得的差分信號能夠減少共模噪聲,增強信號幅度。通過PZT鏡面正弦運動、PZT粗糙面正弦運動分別模擬了理想環境和噪聲環境下的振動位移測量實驗,實驗結果表明,最大重構誤差降低了0.4%,該結構能夠降低噪聲對待測信號的影響,提高重構信號的精度。全光纖結構對環境更為敏感,將該系統小型化,使其適用于各種噪聲環境是今后的一個研究方向。
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
天天愛科學(2020年6期)2020-09-10 07:22:44
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
電子制作(2018年11期)2018-08-04 03:25:42
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學物理學報(2017年6期)2018-01-22 02:26:40
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
