機(jī)器學(xué)習(xí)算法在自動(dòng)駕駛系統(tǒng)中的應(yīng)用
2021-10-17 10:02:24劉雙霞
中國水運(yùn) 2021年9期
關(guān)鍵詞:機(jī)器學(xué)習(xí)
劉雙霞

摘 要:自20世紀(jì)初,隨著人工智能的迅速發(fā)展,“自動(dòng)駕駛”汽車也被雄心勃勃的工業(yè)巨頭提出,作為新世紀(jì)科技時(shí)代的一大重要工業(yè)改革。從2005年DARPA挑戰(zhàn)賽以來,基于車輛智能化的自動(dòng)駕駛,進(jìn)入快速發(fā)展期。從互聯(lián)網(wǎng)巨頭到傳統(tǒng)汽車企業(yè)紛紛投入巨資,試圖引領(lǐng)這場出行技術(shù)的革命。本論文將概述自動(dòng)駕駛這一方興未艾的應(yīng)用領(lǐng)域,并介紹機(jī)器學(xué)習(xí)算法在自動(dòng)駕駛汽車領(lǐng)域發(fā)揮的作用及其實(shí)現(xiàn)原理。
關(guān)鍵詞:自動(dòng)駕駛;機(jī)器學(xué)習(xí);算法
中圖分類號:U471.1? ? ? ? ? ?文獻(xiàn)標(biāo)識碼:A? ? ? ? ? ? 文章編號:1006—7973(2021)09-0148-04
1自動(dòng)駕駛汽車研究現(xiàn)狀
1.1 研究背景及其國內(nèi)外研究現(xiàn)狀
21世紀(jì)已經(jīng)到了一個(gè)科技迅速爆發(fā)的時(shí)代,無人駕駛新能源汽車[1]更是如火如荼地發(fā)展,2016年7月,寶馬、英特爾、mobileye正式宣布將與寶馬共同合作開發(fā)一款無人駕駛新能源汽車,優(yōu)勢相得而補(bǔ),各有所需,也大大減少了政府籌措用于發(fā)展自動(dòng)駕駛技術(shù)[2]的資本、人才對自己主營業(yè)務(wù)的沖擊。2016年福特作為目前中國所有傳統(tǒng)的智能車企中唯一的最后一家從迭加替代式自動(dòng)安全駕駛智能汽車硬件擴(kuò)充至第二代智能汽車硬件生產(chǎn)商,然而它的自動(dòng)安全駕駛智能汽車硬件產(chǎn)品能力相比特斯拉而言卻確實(shí)要微弱得多。從現(xiàn)階段國內(nèi)的汽車智能無人駕駛產(chǎn)業(yè)市場總體分析情況來看,現(xiàn)代中國的智能無人駕駛這一技術(shù)發(fā)展起步較晚,它的L2和以及L3階段均落后于歐美,但在L3和L4階段卻明顯地呈現(xiàn)有所加速趕超之勢,隨著國內(nèi)國外諸如百度等眾多科技公司及其龍頭企業(yè)在現(xiàn)代中國汽車智能無人駕駛這一關(guān)鍵技術(shù)發(fā)展方向上的深入研究和產(chǎn)業(yè)布局,智能無人駕駛這一技術(shù)已經(jīng)逐漸獲得更多國家政策上的支持。
1.2自動(dòng)駕駛汽車的發(fā)展歷程
自動(dòng)駕駛的級別劃分主要包括兩套標(biāo)準(zhǔn):一套由美國高速公路安全管理局制定的,一套由SAE International制定的。專業(yè)分級[3]定義如下:
L1駕駛員輔助:基本相當(dāng)于人工駕駛,應(yīng)其只是依賴不太靈敏的輔助功能來輔助駕駛。
L2部分自動(dòng)駕駛:部分自動(dòng)駕駛是當(dāng)乘車人員在接受到車身發(fā)出的警告時(shí)沒做出相應(yīng)的應(yīng)急動(dòng)作時(shí),部分駕駛汽車就會及時(shí)啟動(dòng)駕駛系統(tǒng),做出應(yīng)急操作[4]。
L3條件下的自動(dòng)駕駛:該階段的自動(dòng)駕駛車輛就是在對駕駛員進(jìn)行監(jiān)控的條件下,讓這輛汽車能夠自動(dòng)地控制其行駛方向和車輛的行駛速度。
L4高度自動(dòng)駕駛:該階段的自動(dòng)駕駛汽車是指即使在沒有駕駛員監(jiān)視的情況下,汽車也可以自動(dòng)改變汽車的行駛路徑及行駛速度。
L5完全自動(dòng)無人駕駛:汽車是自動(dòng)駕駛汽車無人駕駛的一種非常理想駕駛類型和一種形式,乘客不僅僅只是需要為他們自己提供一個(gè)汽車目的地,無論在任何的惡劣路況,任何的惡劣天氣,車輛都一樣可以輕松實(shí)現(xiàn)完全自動(dòng)汽車駕駛。
2自動(dòng)駕駛汽車的組成及優(yōu)缺點(diǎn)
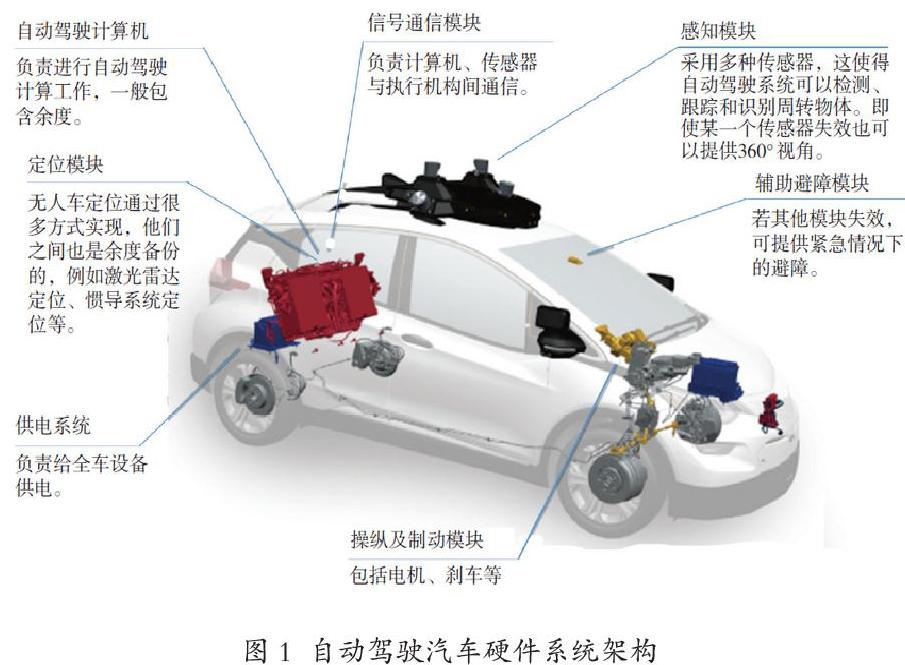
2.1硬件組成
無人駕駛汽車的硬件[4]組成主要包括車身各個(gè)模塊的傳感器系統(tǒng)、攝像頭系統(tǒng)、供電系統(tǒng)、啟動(dòng)系統(tǒng),具體組成如圖所示:
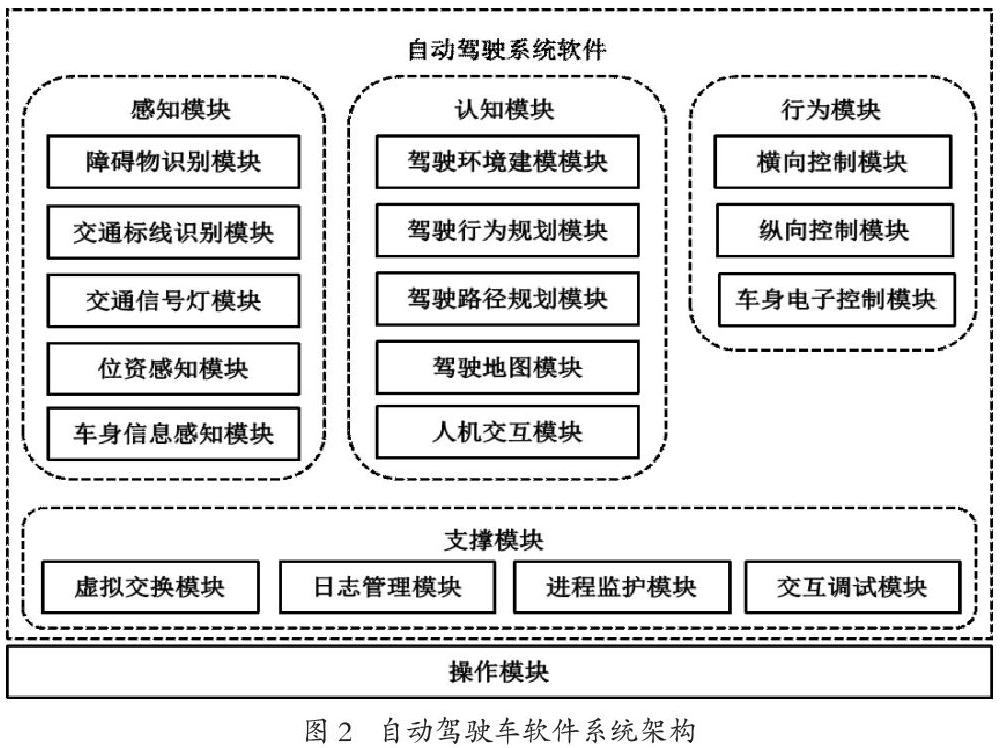
2.2軟件框架
自動(dòng)駕駛汽車軟件[5]主要包括:感知、認(rèn)知、行為、支撐和操作模塊。各模塊如圖2。
2.3自動(dòng)駕駛的優(yōu)缺點(diǎn)
安全:從理論上講,一個(gè)完美的自動(dòng)駕駛解決方案,每年至少能夠拯救120萬中國老年人的健康和生命。
方便:自動(dòng)駕駛可以將駕駛員從方向盤后面解放出來,在乘車時(shí)進(jìn)行工作和娛樂。
高效共享:如果能夠?qū)崿F(xiàn)自動(dòng)駕駛,那么人們可以不再買車和養(yǎng)車,完全依賴于共享出行,這將為每個(gè)家庭節(jié)約大量在交通方面的開支。
減少擁堵:減少擁堵這一優(yōu)點(diǎn),可以使得人們的出行更加方便快捷。
3 機(jī)器學(xué)習(xí)在自動(dòng)駕駛系統(tǒng)中的作用
作為一種人工智能[5]技術(shù)在汽車行業(yè)、運(yùn)輸領(lǐng)域的一個(gè)延伸和應(yīng)用,無人駕駛近幾年來已經(jīng)在全球乃至國際社會各個(gè)地區(qū)以及其他國家和地區(qū)得到了廣泛的密切重視。
學(xué)習(xí)是現(xiàn)階段人工智能發(fā)展的重要表現(xiàn),深度學(xué)習(xí)[6][7]和功能是人工智能發(fā)展的重要特點(diǎn),而且自動(dòng)駕駛的本質(zhì)是通過智能汽車向人們學(xué)習(xí)而駕駛汽車。感知技術(shù)主要依靠傳感器,比如攝像頭,由于它們的成本較低,在行業(yè)內(nèi)倍受廣泛青睞。圖像[8]辨識技術(shù)就是通過一個(gè)攝像頭,我們就可以輕松地完成對交通標(biāo)志的辨識、交通信號燈的辨識、行人的檢測,甚至我們就可以辨識前方到底是自行車、汽車或者卡車。認(rèn)知與控制這兩個(gè)方面,主要利用了人工智能技術(shù)領(lǐng)域下汽車中的一種傳統(tǒng)機(jī)器人學(xué)習(xí)技術(shù),通過機(jī)器學(xué)習(xí)對人類駕駛員的行動(dòng)和駕駛方式建立了駕駛員的模型,學(xué)習(xí)機(jī)器人的駕駛方式來操縱和控制[9]汽車。
4 自動(dòng)駕駛中應(yīng)用的機(jī)器學(xué)習(xí)算法
4.1算法概述
人工智能算法主要包括數(shù)據(jù)處理、圖像識別和語義分割技術(shù),而自動(dòng)駕駛汽車的實(shí)現(xiàn)必須用到這三項(xiàng)技術(shù),其中機(jī)器學(xué)習(xí)可包括監(jiān)督學(xué)習(xí)、無監(jiān)督學(xué)習(xí)和增強(qiáng)學(xué)習(xí)。
假設(shè)自動(dòng)駕駛被劃分為四項(xiàng)子任務(wù),分別為檢測目標(biāo)、物體的識別和分類、對物體的定位與運(yùn)動(dòng)進(jìn)行預(yù)測。可大致劃分為四種類型:回歸算法、聚類算法和決策矩陣算法,其中需要特別注意的就是機(jī)器學(xué)習(xí)算法[10]和任務(wù)分類并不都是一一相互對應(yīng)的,比如回歸算法既然可以廣泛應(yīng)用于物體的定位,也同樣可以廣泛應(yīng)用于物體的檢測和對象運(yùn)動(dòng)的預(yù)測。
4.2決策矩陣算法
決策矩陣算法可以系統(tǒng)地分析、識別和評價(jià)一組信息集和值之間的關(guān)系性表現(xiàn),主要是為了幫助用戶做出決策adaboosting 是最常見的算法。我們可以把a(bǔ)daptive boosting 算法簡單地稱之為 adaboost ,它是多種機(jī)器學(xué)習(xí)算法的完美組合,可以廣泛地應(yīng)用在回歸和分類問題中。
上面這張圖片描述了如何通過一個(gè)能夠理解度量代碼的簡單文件來實(shí)現(xiàn) adaboost 算法。
4.3聚類算法
有時(shí),系統(tǒng)所獲取的信息或者圖像并沒有很清楚,使得對于一個(gè)物體來說難以進(jìn)行定位和檢測。
4.3.1 K-均值算法
K-均值用來表示若有一個(gè)點(diǎn)送到某一質(zhì)心的時(shí)間距離相對于到其他質(zhì)心都近,這個(gè)點(diǎn)就被指派送到這個(gè)最近的質(zhì)心所需要代表的簇。K均值圖如下:
用“x”這個(gè)符號直接表示在該圖中各點(diǎn)的最近聚合分類質(zhì)心,在每次迭加替代中各點(diǎn)的每個(gè)訓(xùn)練樣本實(shí)例都可能需要再次指派該輸出來用以找到一個(gè)最近的集合聚類質(zhì)心,每個(gè)訓(xùn)練集合的最近聚合分類質(zhì)心被通過轉(zhuǎn)換來作為從點(diǎn)移動(dòng)到其他點(diǎn)的一個(gè)平均值。
4.3.2支持向量機(jī)(SVM)
SVM最主要的特征之一就是決策平面,其可以把明顯具有類似或類別之間關(guān)系的物體與對象區(qū)分開。例如圖5所示,決策的邊界將紅色與綠色之間的物體區(qū)分成兩個(gè)部分。
4.4卷積神經(jīng)網(wǎng)絡(luò)
卷積式運(yùn)動(dòng)神經(jīng)網(wǎng)絡(luò)在各個(gè)可廣泛應(yīng)用的技術(shù)領(lǐng)域主要應(yīng)用有:圖像識別、語音信息識別、自然語言處理(或者例如根據(jù)語句順序劃分)。它們還能夠準(zhǔn)確地快速識別隨時(shí)出現(xiàn)在人臉、物件和其他交通運(yùn)輸工具上的各種信號,從而給駕駛機(jī)器人和智能電子自動(dòng)車輛駕駛中的車輛應(yīng)用提供了新的視力。卷積神經(jīng)網(wǎng)絡(luò)的具體操作示意圖如圖6所示:
5人工智能在自動(dòng)駕駛定位技術(shù)中的應(yīng)用
自動(dòng)駕駛汽車若想安全行駛,必須要能實(shí)現(xiàn)精準(zhǔn)的定位,包括行駛路上車道線的定位、停車如圖定位,紅綠燈定位,所以說自動(dòng)駕駛行駛的基礎(chǔ)就是定位技術(shù)。下圖為定位算法實(shí)施框圖:
利用深度學(xué)習(xí)[11]算法實(shí)現(xiàn)無人駕駛的實(shí)施步驟如下:
(1)對數(shù)據(jù)進(jìn)行預(yù)處理。
(2)輸入大量數(shù)據(jù)對第一層進(jìn)行無監(jiān)督學(xué)習(xí)。
(3)對數(shù)據(jù)分類,將相近的數(shù)據(jù)劃分為同一類,隨機(jī)進(jìn)行判斷。
(4)調(diào)整閥值,提高數(shù)據(jù)輸入的正確性。
(5)將其訓(xùn)練結(jié)果作為其更高一層的輸入。
(6)輸入之后用監(jiān)督學(xué)習(xí)去調(diào)整所有層。
6 自動(dòng)駕駛技術(shù)所面臨的挑戰(zhàn)和展望
在我國交通運(yùn)輸和出行條件越來越糟糕的大環(huán)境情況下,“自動(dòng)駕駛”小型汽車在市場上的商業(yè)化發(fā)展前景,還是會受到許多因素的制約。主要包括:
(1)法規(guī)障礙。
(2)不同品牌車型間建立共同協(xié)議[12]。
(3)產(chǎn)品行業(yè)缺乏規(guī)范與標(biāo)準(zhǔn)、基本的道路情況,標(biāo)志和信息的準(zhǔn)確。
(4)信息網(wǎng)絡(luò)的安全性和難以承受的高昂成本。
這些制約就目前的技術(shù)來說,L4自動(dòng)駕駛汽車于2020年底已初步實(shí)現(xiàn),但還是無法實(shí)現(xiàn)全自動(dòng)駕駛L5。好在自動(dòng)汽車駕駛困難關(guān)鍵在于人的感知,重在“學(xué)習(xí)”,自動(dòng)汽車駕駛的基礎(chǔ)科學(xué)和工業(yè)技術(shù)水平遲早會遠(yuǎn)遠(yuǎn)地要超越現(xiàn)代人類,完全自動(dòng)無人駕駛或許有點(diǎn)遙遠(yuǎn),但要實(shí)現(xiàn)這種人機(jī)和諧的共同試駕的目標(biāo)指日可待。
參考文獻(xiàn):
[1]陳曉博.發(fā)展自動(dòng)駕駛汽車的挑戰(zhàn)和前景展望[J].綜合運(yùn)輸,2016(11):9-13.
[2]余阿東,陳睿煒. 汽車自動(dòng)駕駛技術(shù)研究[J].汽車實(shí)用技術(shù),2017(2):124-125.
[3]朱敏慧.逐步實(shí)現(xiàn)自動(dòng)駕駛5個(gè)層級[J].汽車與配件,2016(11):4.
[4]2018 Self-driving safety report[R]. General Motors Cooperation,F(xiàn)ebruary 2018.
[5]郭旭.人工智能視角下的無人駕駛技術(shù)分析與展望[J].電子世界,2017(20):64-65.
[6]王科俊,趙彥東,邢向磊.深度學(xué)習(xí)在無人駕駛汽車領(lǐng)域應(yīng)用的研究進(jìn)展[J].智能系統(tǒng)學(xué)報(bào),2018,13(1):55-69.
[7]On the road to fully self-driving-modeling the future challenge[R]. Waymo Safety Report,October 2017.
[8]Seif H G,胡曉龍.智能城市中自動(dòng)駕駛汽車工業(yè)的關(guān)鍵挑戰(zhàn):高清地圖[J]. Engineering,2016(02):27-35.
[9]薛建儒,李庚欣. 無人車的場景理解與自主運(yùn)動(dòng)[J].無人系統(tǒng)技術(shù),2018,1(2):24-33.
[10]Lillicrap T P,Hunt J,Pritzel A,et al. Continuous control with deep reinforcement learning[J]. Computer Science,2015,8(6):A187.
[11]Van HH ,Guez A ,Silver D. Deep reinforcement learning with double q-learning[J]. Computer Science,2015.
[12]Scott P,Hans A,Xinxin D,etal. Perception,planning,control,and coordination for autonomous vehicles[J].Machines,2017,5(1).
猜你喜歡
電子技術(shù)與軟件工程(2016年22期)2016-12-26 21:36:42
時(shí)代金融(2016年27期)2016-11-25 17:51:36
科教導(dǎo)刊(2016年26期)2016-11-15 20:19:33
活力(2016年8期)2016-11-12 17:30:08
科學(xué)與財(cái)富(2016年28期)2016-10-14 21:19:17
電腦知識與技術(shù)(2016年20期)2016-08-19 18:49:49
電腦知識與技術(shù)(2016年12期)2016-06-14 00:45:31
科教導(dǎo)刊·電子版(2016年10期)2016-06-02 19:17:03
科教導(dǎo)刊·電子版(2016年10期)2016-06-02 18:04:11
電腦知識與技術(shù)(2016年3期)2016-04-07 16:12:55