小型無人機測繪系統(tǒng)的問題分析及優(yōu)化改進
2021-10-20 00:58:54王文昭劉朋飛
科學(xué)技術(shù)創(chuàng)新 2021年28期
王文昭 劉朋飛
(天津師范大學(xué) 地理與環(huán)境科學(xué)學(xué)院,天津 300387)
在測繪作業(yè)中,無人機作為飛行平臺搭載遙感載荷因具有機動快速的響應(yīng)能力、低使用成本、高分辨率圖像和高精度定位數(shù)據(jù)獲取能力等特點,適用于低空遙感數(shù)據(jù)的快速獲取。基于不同的作業(yè)區(qū)域及所需的數(shù)據(jù)類型,一般會選擇使用消費級無人機搭載相關(guān)載荷進行數(shù)據(jù)采集或購買大型無人機公司提供的數(shù)據(jù)獲取服務(wù)。這兩種飛行平臺,在實際的數(shù)據(jù)采集過程中都有自己的優(yōu)勢,可也會因為飛行平臺本身的原因影響數(shù)據(jù)質(zhì)量(例如數(shù)據(jù)缺失或者無法提供后期提高數(shù)據(jù)解算精度所需要的飛行信息數(shù)據(jù)等)。其中,前者由于成本低廉使用簡單的特性被普遍推廣并廣泛應(yīng)用于攝影測量[1-4]但飛行平臺和載荷系統(tǒng)幾乎完全獨立;而后者受限于飛行空域管制和成本原因難以普及但系統(tǒng)較為完備成熟, 常用于大面積的作業(yè)區(qū)域或應(yīng)急測繪[5-6]。本文分析了測繪過程中小型無人機出現(xiàn)的問題,借鑒大型無人機在相同領(lǐng)域的系統(tǒng)優(yōu)勢和飛行經(jīng)驗,結(jié)合小型無人機飛行平臺與載荷系統(tǒng)相互獨立的特性,從飛行平臺和載荷系統(tǒng)兩個方面提出優(yōu)化方式。
1 測繪作業(yè)中無人機的重分類
區(qū)別于專業(yè)的飛行團隊,在使用無人機作為測繪作業(yè)中低空遙感數(shù)據(jù)采集的飛行平臺時,是基于作業(yè)區(qū)域和所需要的數(shù)據(jù)類型來對飛行平臺進行選擇而非通過固定的飛行平臺來完成任務(wù),因此對于從事測繪作業(yè)的無人機的分類,不應(yīng)以空機重量、最大起飛重量、最大巡航速度等傳統(tǒng)分類參數(shù)[7]進行區(qū)分,而是以是否為完整的系統(tǒng)、最大航程、飛行高度、續(xù)航時間等來進行分類。
本文以無人機飛行平臺是否需要專業(yè)的飛行維護團隊為基礎(chǔ),將測繪無人機劃分為為無人機飛行系統(tǒng)(后文簡稱大型無人機)和飛行器(后文簡稱小型無人機)兩大類。
1.1 無人機飛行系統(tǒng)
無人機飛行系統(tǒng)分類包含大型固定翼無人機及垂直起降固定翼無人機[8],其特點是內(nèi)部系統(tǒng)為獨立完整,包含飛行控制系統(tǒng)(能進行較為精確的飛行控制)、動力系統(tǒng)(一般以汽油發(fā)動機作為動力來源)、電氣系統(tǒng)(包含載荷系統(tǒng),一般提供固定格式的電源和數(shù)據(jù)接口)、通信系統(tǒng)、結(jié)構(gòu)系統(tǒng)等,此分類中可以根據(jù)使用的航空發(fā)動機的不同、是否需要起降場地、通信波段等進行再分類(前兩者涉及空域管制,后者涉及無線電管制)。
1.2 無人機飛行器
無人機飛行器是指以飛行系統(tǒng)高度集成并和載荷系統(tǒng)相對獨立的以電為動能驅(qū)動的飛行高度低于120m 且不需要起降場地和在此基礎(chǔ)上以提高續(xù)航能力為目的的加裝了汽油發(fā)電裝置的旋翼無人機。
2 測繪過程中小型無人機系統(tǒng)的問題分析
2.1 作業(yè)區(qū)域較小
2.1.1 續(xù)航時間有限
小型無人機在搭載測繪作業(yè)載荷和RTK 系統(tǒng)設(shè)備后在純電池驅(qū)動下航時一般不超過60 分鐘,無法滿足數(shù)據(jù)獲取的需求。在僅以增加續(xù)航時間為目的的前提下,出現(xiàn)了加裝汽油發(fā)電機和油電混合動力兩種類型[9-10]。加裝汽油發(fā)電機雖提升了續(xù)航時間,但是加裝的發(fā)電機變相的減少了可搭載載荷的質(zhì)量,而且并沒有增加供電的輸出功率,沒有解決小型無人機在測繪過程中的系統(tǒng)問題;油電混合動力兩種類型采用油電混合動力進行驅(qū)動已經(jīng)可以算是一個全新的飛行器架構(gòu)了,在前面提出的無人機分類中應(yīng)歸為無人機飛行系統(tǒng),在此不予討論。
2.1.2 通信控制半徑較近

2.2 飛行模式存在安全隱患
目前的小型無人機依法在120m 以上真實高度飛行需要AOPA 資格證并申請對應(yīng)空域得到批準(zhǔn)。在AOPA 的課程中,對一些緊急情況進行了訓(xùn)練,例如在GPS 失效下進行的地面站(控制手柄)盲飛訓(xùn)練,但是這本質(zhì)上還是小型無人機在航跡規(guī)劃和飛控機程序上的智能化不足所導(dǎo)致的,目前僅有少數(shù)型號加裝了低電量應(yīng)急返航機制,與大型無人機相比,缺乏應(yīng)急降落系統(tǒng)。
2.3 載荷搭載能力不足
小型無人機在載荷的搭載能力上,主要受到載荷的功率、體積和重量三方面的制約,以攝影測量為例:在進行拍攝和數(shù)據(jù)獲取過程中,主要需要獲取拍攝圖像、拍攝時飛機的GPS 坐標(biāo)數(shù)據(jù)、拍攝時飛機的飛行姿態(tài)數(shù)據(jù)。在上述的這三類數(shù)據(jù)中,為了進行數(shù)據(jù)處理,拍攝的圖像要滿足足夠的重疊度,但是由于地形起伏容易導(dǎo)致一些照片的重疊度不夠,為此應(yīng)當(dāng)根據(jù)無線電測距(雷達高度)進行飛行,但實際上無論是在飛控機程序還是飛行器平臺本身的設(shè)計中都沒有搭載對地?zé)o線電測距的設(shè)備,因此為了滿足獲取影像重疊度要求,應(yīng)額外搭載無線電測距載荷;飛機的飛行姿態(tài)數(shù)據(jù)主要來源于IMU,由于積分算法的發(fā)散誤差會隨著時間進行累加,需要定時的進行誤差修正[12]。在實際應(yīng)用中,對INS 誤差修正的最好方式是通過垂直陀螺設(shè)備,為了獲得較為精確的飛行姿態(tài)數(shù)據(jù),應(yīng)額外搭載垂直陀螺載荷[13]。但無論是無線電測距設(shè)備還是垂直陀螺儀,都受限于電池功率、飛行器體積以及起飛重量而無法搭載。
3 基于大型無人機飛行經(jīng)驗的小型無人機測繪系統(tǒng)的改進
3.1 針對由于通信范圍限制導(dǎo)致的作業(yè)區(qū)域問題,引入無人機副地面站
大型無人機在設(shè)計之初,其目的主要是搭載光電載荷進行偵查任務(wù),而往往需要偵查的區(qū)域距離起飛區(qū)域比較遠,超出視距通信距離(7000m 飛行高度的視距通信距離約為230-250km,而中大型無人機巡航速度平均為160-180km/h),當(dāng)時衛(wèi)星通信應(yīng)用無人機相關(guān)技術(shù)并不成熟,于是出現(xiàn)了前端地面數(shù)據(jù)終端的(Front Ground Data Terminal 簡稱FGDT)概念,該系統(tǒng)將無人機地面站分為指揮站和地面數(shù)據(jù)終端兩部分,通過光纖進行連接,使指揮站可以選擇和任意一個地面數(shù)據(jù)終端進行通信從而通過該地面控制終端的數(shù)據(jù)鏈設(shè)備來對無人機進行控制,前端地面數(shù)據(jù)終端的出現(xiàn)延長了無人機的視距通信距離。
對于小型無人機來說,通信控制終端的設(shè)計一般都是集成在一起便于攜帶且對于地面終端要求僅限于正常穩(wěn)定工作,因此降低了無人機副站的布設(shè)要求。而且小型無人機在進行飛行作業(yè)時,由于飛行通信和載荷系統(tǒng)相互獨立,所采集的數(shù)據(jù)均儲存于載荷之中無需實時下傳,因此借鑒并簡化大型無人機副地面站的結(jié)構(gòu),使用增益較小,系統(tǒng)結(jié)構(gòu)最簡的數(shù)據(jù)鏈設(shè)備進行搭建。其最簡結(jié)構(gòu)如圖1 所示。
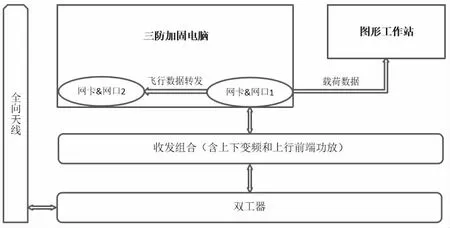
圖1 無人機副地面站最簡結(jié)構(gòu)
小型無人機系統(tǒng)數(shù)據(jù)鏈系統(tǒng)下傳數(shù)據(jù)并不包含載荷信息,因此可以取消該系統(tǒng)的圖形工作站部分。該結(jié)構(gòu)為無人機地面控制站的最簡結(jié)構(gòu),由于飛行高度較低地面站天線增益無需太高因而使用全向天線即可,按照該結(jié)構(gòu)搭建好無人機副地面后,可根據(jù)不同的無人機類型以及不同大小區(qū)域的測區(qū)來進行地面選址,見圖2。
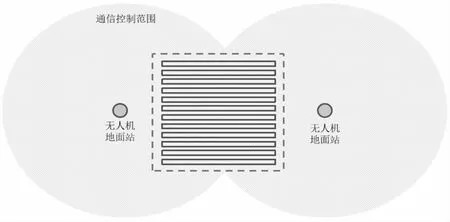
圖2 無人機地面站選址方案
其中虛線區(qū)域為任務(wù)測區(qū),里面為任務(wù)區(qū)域的航帶,其中兩個地面站的視距通信范圍必須有至少15%的重合用于接力。而對于小型無人機來說,副地面站的引入不僅可以增加通信控制范圍,而且允許無人機一條一條航帶進行單向飛行,到達另一端后進行充電,這樣也同時解決了電池功率導(dǎo)致的航時不足的問題,為后面增加飛行參數(shù)量算設(shè)備和載荷前端設(shè)備提供了條件。
3.2 針對飛行安全的需求提升和數(shù)據(jù)黑洞,引入雷達高度計設(shè)備
相比于氣壓高度和GPS 高度,雷達高度是最能夠直觀反映當(dāng)前飛行器對地高度的量算設(shè)備,在大型無人機的飛行作業(yè)中,無論是起飛降落還是在任務(wù)區(qū)域中按照要求進行衛(wèi)星通信的超低空飛行,均使用雷達高度作為參考依據(jù),而在應(yīng)用于小型無人機的高精度雷達設(shè)備的研究中,已經(jīng)有測距50m 以內(nèi)的較為成熟的研究(小型無人機最大飛行高度120m),滿足使用需求[14]。在小型無人機上安裝雷達高度是基于非本場的應(yīng)急降落的安全和避免數(shù)據(jù)黑洞兩個方面的原因。
3.2.1 應(yīng)急降落
大型無人機在進行降落時,有時會由于距離地面站較近而導(dǎo)致主鏈路天線跟蹤失效,此時會為了保證飛行降落安全,切換備用鏈路來上傳接收實時的飛行信息來保證飛機的降落安全,此時飛行操作人員在操作降落時不一定會有清晰的圖像作為參考,主要依靠對實時飛行數(shù)據(jù)信息的解讀和調(diào)整,而對于小型無人機來說,進行應(yīng)急降落需要考慮的主要是降落區(qū)域選擇以及之后的安全降落,在選定降落區(qū)域之后,可以根據(jù)雷達高度提供的信息,慢慢調(diào)整到合適的降落速度,最后在可能由于飛行高度過低導(dǎo)致的通信丟失的情況下進行安全降落。
3.2.2 避免數(shù)據(jù)黑洞
為了滿足測圖的需求,在同一條航線上,相鄰相片需要有一定范圍的影像重疊(即航向重疊),相鄰航線也應(yīng)有足夠的影像重疊(即旁向重疊)[15]。大型無人機在自主飛行模式過程中(一般在切入任務(wù)航跡之后)默認按照設(shè)定航跡點根據(jù)氣壓高度進行飛行,雖然可以手動在切入任務(wù)航跡之前改為按照GPS 高度進行飛行,但由于飛機的自主返航機制設(shè)定在幾分鐘內(nèi)收不到上行數(shù)據(jù)幀(沒有控制信號會發(fā)只有幀頭幀尾中間都是0 的空幀)就自動切入自主返航模式,這會直接切出任務(wù)航跡并且默認按照返航航跡的氣壓高度進行飛行,無論是航跡的改編還是坐標(biāo)高度的改編都會導(dǎo)致數(shù)據(jù)的無效化。而小型無人機在作業(yè)區(qū)域內(nèi)進行飛行時,一般會按照預(yù)先規(guī)劃好的航跡按照固定的高度進行飛行和數(shù)據(jù)采集,不會根據(jù)地形起伏即時調(diào)整飛行高度。當(dāng)?shù)匦纹鸱^大時為了保證相片的立體量測和拼接需要增大重疊度,但由于實際飛行中沒有實時調(diào)整飛行高度,不僅會降低重疊度,還會由于遮擋和陰影造成數(shù)據(jù)缺失,最終造成解析失敗形成數(shù)據(jù)黑洞。
小型無人機不適用于地形較為復(fù)雜的測區(qū),飛行高度也較低,但由建筑物起伏可能造成的重疊度下降和數(shù)據(jù)缺失仍應(yīng)當(dāng)重視。由于小型無人機飛行和載荷系統(tǒng)獨立,雷達高度無法直接作用于飛行系統(tǒng)而是提供參數(shù)支持,因此可以在飛行前根據(jù)像幅尺寸、比例尺、預(yù)期的重疊度的參數(shù)計算出合適的飛行高度范圍,在實際飛行中,根據(jù)雷達高度提供的無線電高度數(shù)據(jù)(對地高度非絕對高度)來實時調(diào)整飛行高度避免在解算中出現(xiàn)數(shù)據(jù)缺失的狀況。
3.3 針對缺少用于輔助解算的姿態(tài)元素,增加載荷前端裝置
大型無人機會為所搭載的載荷預(yù)留固定的電源及數(shù)據(jù)接口。在飛行過程中,為了保證飛機的安全,飛行信息(包含攝影測量在進行POS 輔助空中三角測量中使用的DPS/IMU 提供的空間坐標(biāo)和角元素信息)與載荷下行數(shù)據(jù)傳輸是互相獨立的(飛行信息和載荷數(shù)據(jù)組幀從主鏈路傳輸,飛行信息單獨從備用鏈路進行傳輸),因此攝影測量中從光電載荷的下行信息數(shù)據(jù)中只能獲區(qū)DPGS 信息,缺少飛行姿態(tài)數(shù)據(jù)。而飛控機使用的是內(nèi)部時間,即從上電開始進行計時,所以無法從飛行結(jié)束后的鏈路數(shù)據(jù)信息中解算出每個相片拍攝時準(zhǔn)確的飛行姿態(tài)信息。小型無人機的飛行系統(tǒng)和載荷系統(tǒng)相互獨立,攝影測量的載荷數(shù)據(jù)存儲于載荷內(nèi)部無需實時下傳,因此可以增加一個接收相機控制信號來獲取當(dāng)前飛行姿態(tài)并擁有獨立通信能力的載荷前端模塊,如圖3 所示。
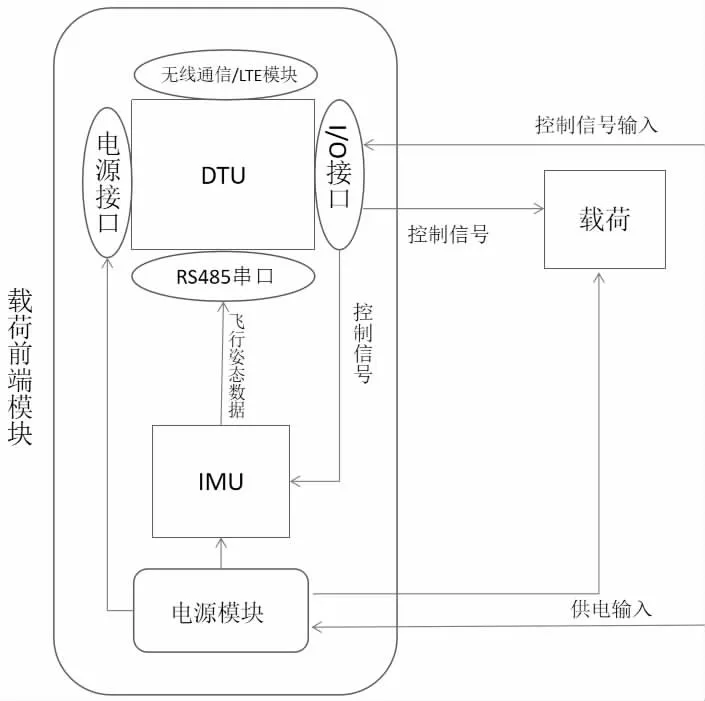
圖3 載荷前端模塊
4 結(jié)論
本文對于應(yīng)用于測繪作業(yè)中的無人機飛行平臺進行了重新分類,并以攝影測量作業(yè)為例,分析了小型無人機飛行系統(tǒng)在該領(lǐng)域應(yīng)用中存在的問題,結(jié)合大型無人機飛行系統(tǒng)相關(guān)的飛行經(jīng)驗,提出了改進方案,以增加作業(yè)范圍、提高安全性能和提高數(shù)據(jù)解算精度。
其中,以最簡結(jié)構(gòu)構(gòu)建無人機副地面站,滿足同一片區(qū)域長時間反復(fù)的測繪需求;為載荷增加前端裝置,一方面能夠保證相機控制電路對于相機的曝光的控制,另一方面同時傳至IMU 的控制信號可以獲取即時的飛行姿態(tài),通過RS485 串口傳至DTU 設(shè)備最后通過無線通信或LTE 模塊傳送到指定的服務(wù)器端口上。引入雷達高度計,不僅可以在為緊急情況下輔助人工降落提供輔助參數(shù)從而增加安全系數(shù);也可以通過在飛行中對該參數(shù)的實時監(jiān)控控制對地飛行高度來保證影響重疊度,避免數(shù)據(jù)缺失。
猜你喜歡
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
浙江國土資源(2019年10期)2019-10-31 03:17:00
建材發(fā)展導(dǎo)向(2019年10期)2019-08-24 06:25:28
中國公共安全(2017年7期)2017-10-13 08:18:11
電子制作(2017年9期)2017-04-17 03:01:00
故事大王(2016年7期)2016-09-22 17:30:08
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學(xué)生導(dǎo)刊(2016年34期)2016-04-11 00:49:44
電測與儀表(2015年5期)2015-04-09 11:30:52
兒童故事畫報(2013年3期)2013-06-24 05:40:30
