剛柔耦合的FSAE賽車前懸架仿真分析
2021-10-20 05:30:46段衛潔陳俊杰
內燃機與配件 2021年20期
關鍵詞:仿真
段衛潔 陳俊杰


摘要:為了更準確地分析FSAE賽車的前懸架特性,運用Hypermesh軟件對雙橫臂獨立懸架的上橫臂和拉桿等受力較大的部位進行了柔性化處理,運用ADAMS/CAR在多剛體前懸架模型的基礎上建立了剛柔耦合前懸架模型。在同樣的設定條件下分別對兩模型進行左右車輪平行跳動的運動學仿真,驗證模型的置信度,并針對前懸架設計提出改進意見。同時發現柔性體替代剛性體后產生的變形會對車輪的定位參數產生一定影響,在分析中不可忽略柔性體因素。
Abstract: In order to analyze the front suspension characteristics of the FSAE racing car more accurately, the Hypermesh software was used to make the upper cross arm and pull rod of the double cross arm independent suspension more flexible, the rigid-flexible coupling front suspension model is established based on the multi-rigid-body front suspension model by using Adams/car. Under the same setting conditions, the kinematics simulation of parallel running-out of left and right wheels was carried out to verify the confidence of the model, and the improvement suggestions for the front suspension design were proposed. At the same time, it is found that the deformation caused by the flexible body replacing the rigid body will affect the positioning parameters of the wheel.
關鍵詞:FSAE賽車;剛柔耦合;前懸架;仿真
Key words: FSAE racing car;rigid-flexible coupling;front suspension;simulation
中圖分類號:U469.79? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? 文獻標識碼:A? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? 文章編號:1674-957X(2021)20-0065-03
0? 引言
目前國內外對于FSAE賽車的研究基本都是基于多剛體動力學理論進行的。而實際上,車輛零部件尤其是某些懸架構件、橡膠連接件等在車輛行駛過程中都會有比較大的變形,這些變形對車輛動力學性能影響很大,在多剛體模型中必須通過引入諸如側傾及外傾系數、側向力變形外傾系數、側傾轉向系數、側向力變形轉向系數、回正力矩變形轉向系數等來代替這些變形的影響,否則不能保證模型的精度,而這些系數必須通過實車試驗才能測量到,若通過將這些大變形零部件柔性化,建立剛柔耦合模型,就不需要測得這些系數,也能得到精度較高的模型[1]。本文中將懸架中受力變形較大的部件進行柔性化處理,以建立更為精確的剛柔耦合動力學模型,提高仿真精度。
1? 懸架剛柔耦合模型的建立
1.1 前懸架系統中的柔性構件
在本賽車雙橫臂獨立懸架中,本文將對前懸架上橫臂和拉桿這些受力較大的構件進行柔性化,在懸架控制臂、減震器之間的連接處使用襯套替代剛性連接,可以起到減振緩沖、吸收振動和沖擊能量等作用,且橡膠襯套的形狀不受限制,各個方向的剛度是通過參數設置來定義的,可在一定范圍內自由選擇,通過設置剛度參數彈性襯套還能承受多個方向不同類型的載荷[2],因此以彈性襯套來代替上橫臂與車身連接處的剛性鉸接,可以使模型更為精確,提高仿真精度。
1.2 懸架關鍵受力部件的柔性化
本文的柔性體模型是在有限元分析軟件Hypermesh里形成的。將CATIA模型導入到Hypermesh中,利用Hypermesh對構件進行幾何清理之后,劃分網格,定義材料屬性及約束,最后用optistruct計算,并將生成的文件轉化為MNF文件[3]。
各構件材料特性根據表1設定[4]。
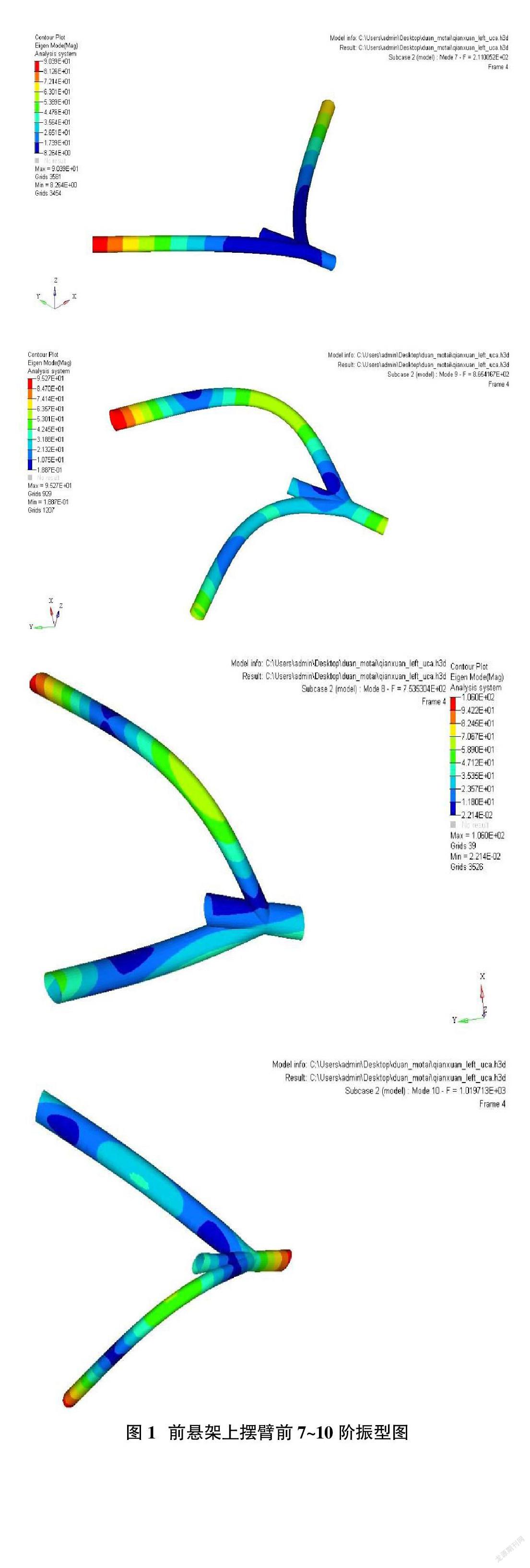
由于構件模型較簡單,且均為勻質空心管,可以采用殼單元劃分網格,單元類型為四邊形。模態的階數對分析時間和結果文件大小影響較大,因此應選擇合理的階數進行模態截取,本文截取前20階模態,其中前6階為剛性模態。
在多剛體模型仿真時,上橫臂和拉桿與其它部件之間通過運動副連接。此處為了模型柔性化處理后與轉向節、車架和曲柄等的外聯,要在相應外聯的硬點位置處生成節點,用多點約束單元實現該節點與其它節點的剛性連接,多點約束常用于一些物理現象,比如剛性連接、鉸接等,特別當一些單元間不相容時用它可以較好實現,在進行模態分析過程中,分析工具會將剛性連接可以自動忽略,不會對模態分析結果產生影響。
前懸架上橫臂第七階到第十階振型圖如圖1所示。從各階振型和共振頻率可以看出模態信息基本準確。
1.3 前懸架剛柔耦合模型建立
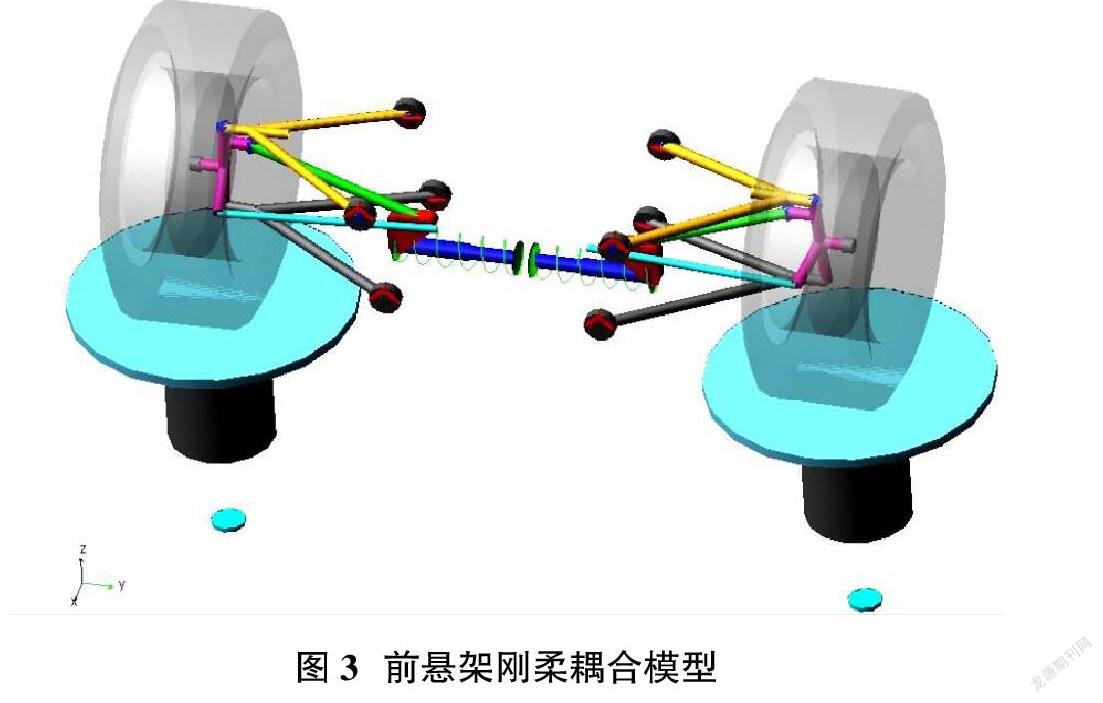
打開已建立好的懸架多剛體動力學模型,如圖2所示。將上擺臂和拉桿的MNF文件導入ADAMS/CAR中,以柔性體取代原來的剛性體,并在外聯點處建立接口件(Interface Part),用于柔性體通過鉸鏈或襯套與剛性體的連接。剛柔耦合動力學模型中各部件的連接方式與多剛體動力學模型相同,將多剛體動力學模型轉化成剛柔耦合動力學模型。將賽車懸架多剛體模板(Template)及剛柔耦合模板分別建立子系統(Subsystem)模型,然后裝載在懸架試驗臺(Suspension Testrig)上,得到的剛柔耦合前懸架仿真模型如圖3所示。
2? FSAE賽車前懸架仿真分析
2.1 前輪定位參數的仿真曲線
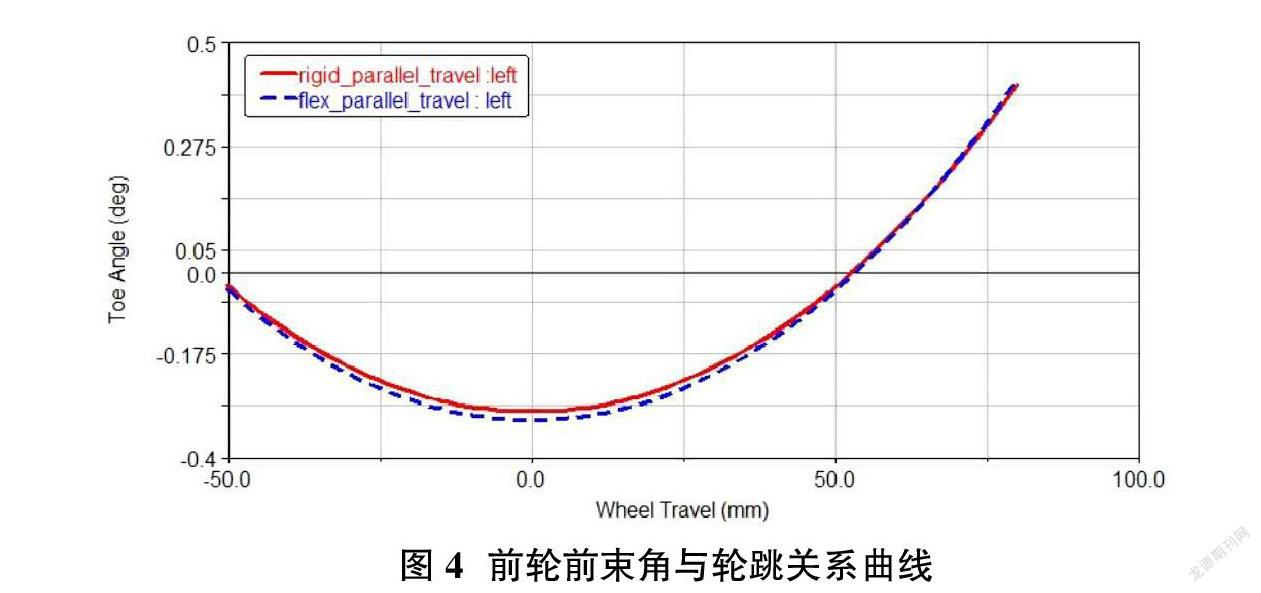
在ADAMS/CAR中,分別對賽車前懸架的多剛體模型和剛柔耦合模型進行雙輪平行同向跳動仿真試驗,設置仿真同向跳動范圍為-50mm~80mm(上跳位移為正,下跳位移為負),進行對比仿真。圖4為前輪前束角與輪跳關系曲線。
設計上希望前輪上下跳動過程中前束角盡量保持不變或變化幅度極小,這樣可以保證賽車的執行穩定性及輕微不足轉向特性。由圖4可見,前輪前束角的變化范圍為-0.31°~0.41°左右,總體變化量較小,滿足設計要求。剛柔耦合仿真的前束角與多剛體仿真相差不大,說明柔性體的存在對前輪前束角的影響不大。
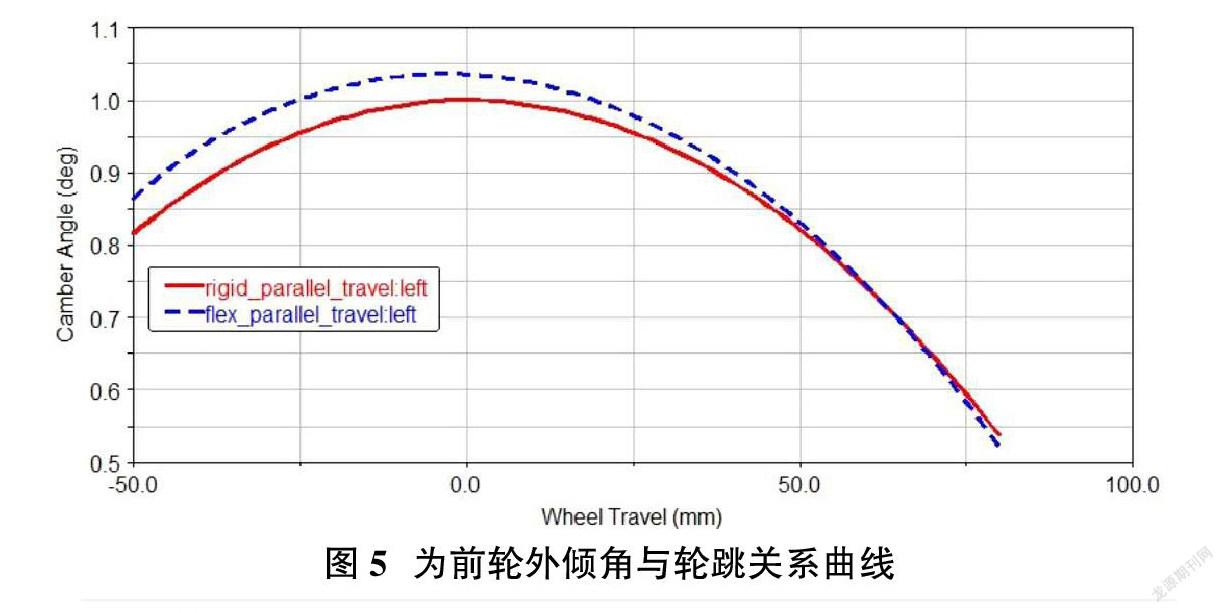
外傾角與前束一樣,對車輛的直行穩定性及穩態響應特性都有較大影響。由圖4中可以看出,靜止時車輪外傾角為1.0°,隨著車輪上跳,外傾角減小,變化趨勢有利于操縱穩定性,整體變化范圍在1.05°~0.55°之間,在合理變化范圍之內。在負輪跳范圍內,多剛體仿真的外傾角比剛柔耦合仿真小0.05°左右,這是由于剛柔耦合懸架模型中,柔性體受力引發的變形導致的。
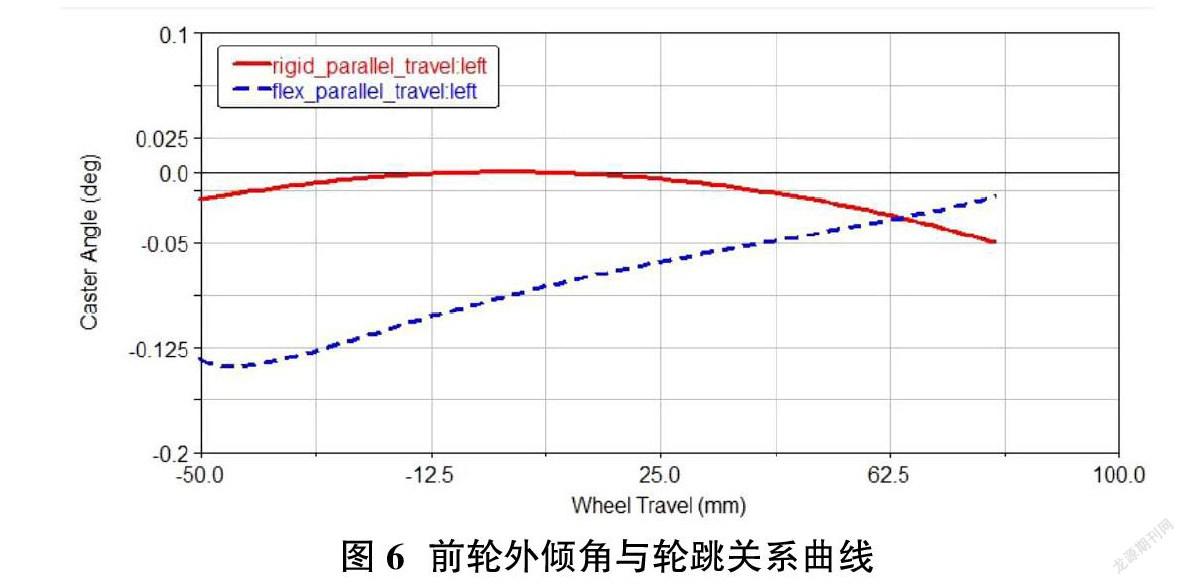
一般后傾角應隨車輪上跳而增加,隨車輪下跳而減小,利于汽車行駛時自動回正。從圖6中曲線可以看出,在車輪跳動過程中,剛柔耦合仿真的主銷后傾角變動量在0.1°左右,且變化趨勢更為符合設計要求,因此在分析中不可忽略柔性體因素。
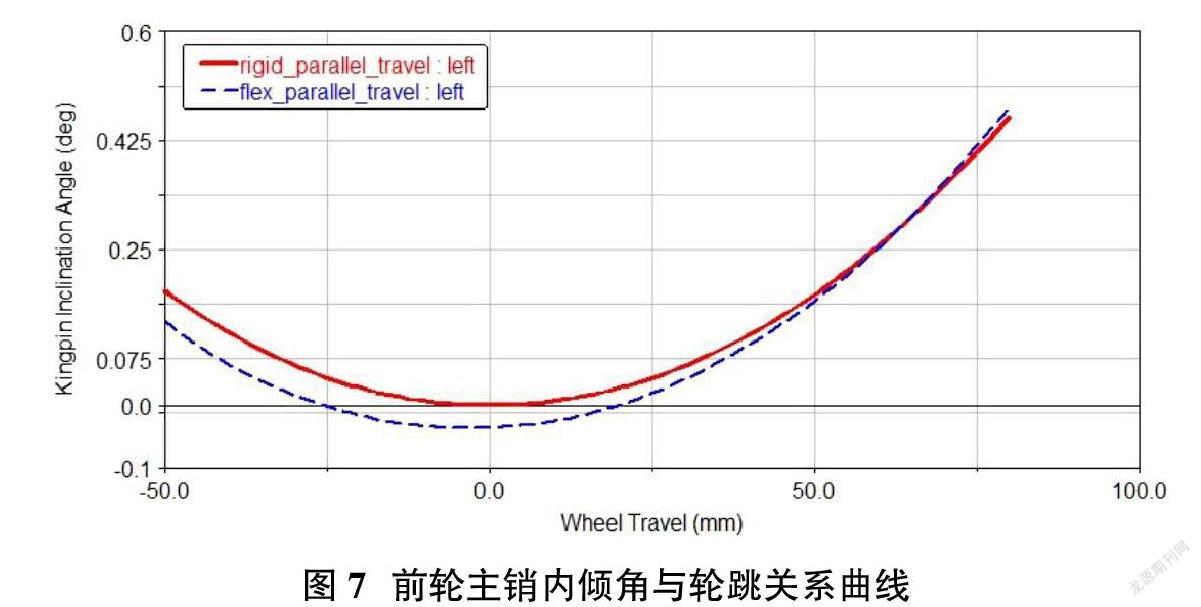
主銷內傾角在低速行駛時對輪胎具有回正作用,由圖7可見,主銷內傾角的變化趨勢與前輪外傾角正好相反,隨車輪上跳而增大,隨車輪下跳而減小,變動量約為0.5°,但變動范圍較小。從仿真結果來看,剛柔耦合后傾角仿真的變動量比多剛體的略大。
2.2 前輪輪距變化量的仿真曲線
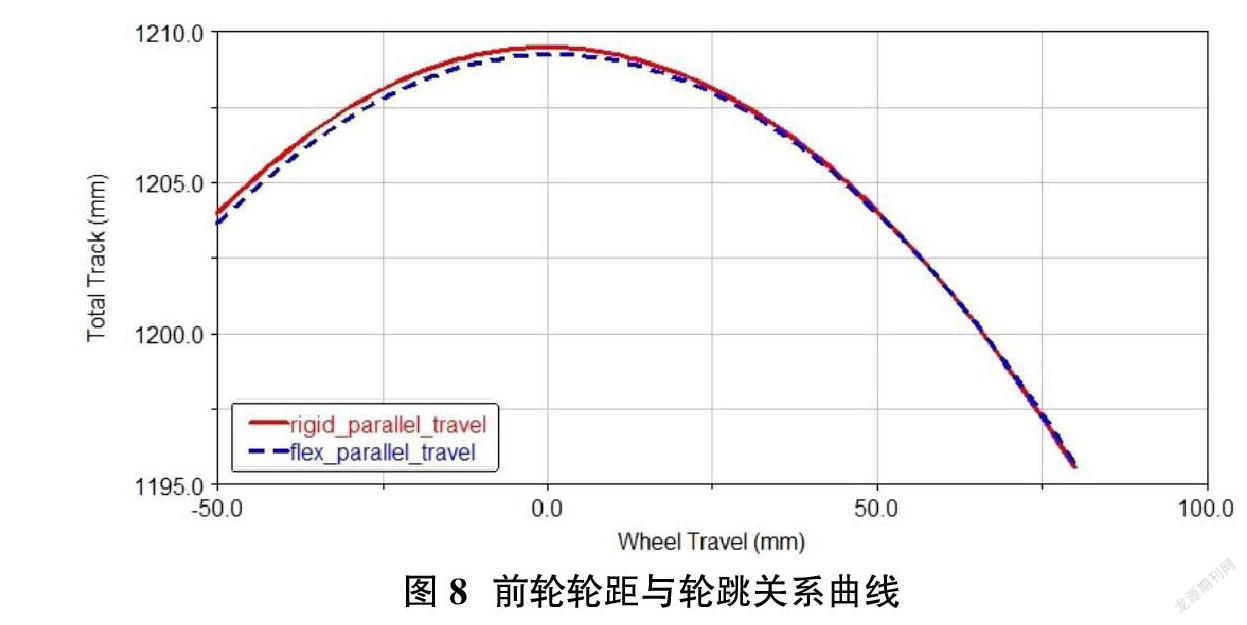
輪距變化會導致側偏角的產生,由此帶來的側向力輸入會對汽車操縱穩定性造成一定影響。輪距變化應盡量小,否則會加劇輪胎的磨損。一般要求輪距的變化量不大于10mm。
圖8為輪距與輪跳的關系曲線。從仿真結果可以看出,柔性體的存在對輪距變化影響不大。輪距變化為12mm左右,變化范圍略大。
3? 結束語
本文運用Hypermesh軟件對懸架中受力較大部位進行模態計算,生成MNF文件后導入ADAMS中建立柔性體,從而建立起剛柔耦合懸架子系統模型。分別對多剛體懸架模型及剛柔耦合懸架模型進行左右車輪平行跳動的運動學仿真,從仿真結果中可以看出:
①多剛體懸架模型和剛柔耦合懸架模型的定位參數變動量都比較小,能夠符合懸架設計要求。
②雖然剛柔耦合模型和多剛體模型的車輪定位參數曲線的變化趨勢基本一致,但變化范圍有所不同,說明柔性體替代剛性體后產生的變形會對車輪的定位參數產生一定影響。其中柔性體的存在對前束角的影響不大,但對其他懸架參數都有著不同程度的影響。例如剛柔耦合仿真的主銷后傾角變動量變化趨勢較多剛體模型更為符合設計要求,說明在分析中不可忽略柔性體因素。
③該懸架輪距變化范圍略大,可通過調整部件結構來進行優化,這樣能夠較好的克服輪胎的磨損。
參考文獻:
[1]車華軍,陳楠,李峻巖.基于剛柔耦合模型的轎車仿真分析及試驗研究[J].汽車工程,2009,31(08).
[2]藍賢清.面向SUV整車性能的剛柔耦合建模、仿真及優化研究[D].鄭州大學,2011.
[3]洪超.某越野車剛柔耦合建模及動力學仿真[D].南京理工大學,2012.
[4]段衛潔.剛柔耦合的FSAE賽車操縱穩定性仿真與試驗研究[J].北京信息科技大學學報,2020(04):84-88.
[5]楊東武.柔性多體系統動力學的建模研究[D].西安:西安電子科技大學,2005.
猜你喜歡
中國教育技術裝備(2016年20期)2016-12-12 10:09:15
中小企業管理與科技·下旬刊(2016年10期)2016-11-18 20:57:34
科技資訊(2016年18期)2016-11-15 20:09:22
科技資訊(2016年18期)2016-11-15 07:55:28
價值工程(2016年29期)2016-11-14 02:01:16
電子技術與軟件工程(2016年18期)2016-11-14 00:46:54
數字技術與應用(2016年9期)2016-11-09 23:25:33
數字技術與應用(2016年9期)2016-11-09 22:09:07
科技視界(2016年18期)2016-11-03 21:44:44
科技視界(2016年18期)2016-11-03 20:31:49