考慮桿臂效應(yīng)與撓曲變形的全自動著艦技術(shù)
2021-10-22 08:54:52梁磊肖靜詹光蘇大林
航空學(xué)報(bào) 2021年8期
梁磊,肖靜,詹光,蘇大林
1. 航空工業(yè)沈陽飛機(jī)設(shè)計(jì)研究所,沈陽 110031
2. 中國航空研究院研究生院,揚(yáng)州 225002
由美國國防部開發(fā)的聯(lián)合精確進(jìn)近著陸系統(tǒng)(Joint Precision Approach Landing System, JPALS)[1]旨在使用結(jié)合了其他傳感器的全球定位系統(tǒng)向陸上和飛機(jī)航母上著艦的軍用飛機(jī)提供準(zhǔn)確和可靠的制導(dǎo)信息。對于艦載相對衛(wèi)星定位系統(tǒng)(Shipboard Relative Global Positioning System, SRGPS)[2]技術(shù)將用于航空母艦著艦,SRGPS也是一種差分GPS系統(tǒng),其目的是支持海軍艦艇及其周圍飛機(jī)的運(yùn)行[3]。目前來看,SRGPS的最終架構(gòu)是否支持自動著艦,這將需要使用實(shí)時(shí)運(yùn)動學(xué)載波相位技術(shù)來計(jì)算相對位置解[3-4]。
具體來說,由于無法將參考GPS天線安裝在艦載機(jī)所需的著陸點(diǎn)(Touch Down Point, TDP)上,因此通常將它們安裝在艦島上。但是,由于進(jìn)近艦載機(jī)需要知道其相對于TDP的位置,因此GPS測量結(jié)果需要從幾何角度轉(zhuǎn)換到這一點(diǎn)。此外,此轉(zhuǎn)換必須考慮所有艦船運(yùn)動,包括姿態(tài)變化。由于波浪等的影響,將導(dǎo)致甲板的撓曲變形,并且桿臂的長度將隨著撓曲而變化。
實(shí)際上,GPS參考站數(shù)據(jù)到TDP的轉(zhuǎn)換是使用假定的兩點(diǎn)之間的已知基線。此假定來源于對艦船姿態(tài)已知以及對艦船為剛體的假設(shè)情況下完成的。但是,艦船瞬時(shí)姿態(tài)估計(jì)中的誤差(來自中央INS)將在平移過程中引入其他誤差,而且船不是剛性的[5-6],這意味著TDP和GPS接收器之間的基線是一個(gè)動態(tài)量。在文獻(xiàn)[6]中,研究了使用雙INS/GPS傳感器監(jiān)測基線運(yùn)動。此外,文獻(xiàn)[5]分析了從艦船試驗(yàn)中收集的數(shù)據(jù),以表征基線運(yùn)動的幅度。文獻(xiàn)[6]中對基線運(yùn)動進(jìn)行了更精細(xì)的分析和表征。在文獻(xiàn)[7-8]中,提出了使用多個(gè)集成式INS/GPS傳感器監(jiān)視參考天線和TDP之間基線矢量運(yùn)動的框架。文獻(xiàn)[9]將撓曲變形處理為白噪聲,采用從濾波器的方法對其進(jìn)行處理。文獻(xiàn)[10]對SINS的桿臂效應(yīng)誤差實(shí)時(shí)補(bǔ)償進(jìn)行了研究。
綜上所述文獻(xiàn),發(fā)現(xiàn)將撓曲變形處理為噪聲是不適合在線標(biāo)定的,而文獻(xiàn)[11-12]雖然提出了對動態(tài)桿臂機(jī)理建模,但其模型比較粗糙;另外,對于撓曲變形模型參數(shù)確定后,鮮有文獻(xiàn)繼續(xù)分析其對最終著艦落點(diǎn)精度的影響。本文首先推導(dǎo)TDP位置的幾何模型和可觀測的虛擬GPS估算值。然后,根據(jù)GPS誤差、姿態(tài)誤差和彎曲殘余(不確定性)誤差,使用幾何模型導(dǎo)出TDP位置估計(jì)精度的隨機(jī)誤差模型。最后,結(jié)合艦船甲板運(yùn)動、艦尾流及艦載機(jī)縱向飛行控制模型,建立了仿真系統(tǒng)架構(gòu),并進(jìn)行了模擬仿真,結(jié)果表明,桿臂效應(yīng)與撓曲變形對著艦落點(diǎn)精度有顯著影響。
1 坐標(biāo)系定義及坐標(biāo)轉(zhuǎn)換
1.1 參考點(diǎn)定義
1) 目標(biāo)著艦點(diǎn):與甲板固連,著艦跑道中線與第一第二攔阻索中線的交點(diǎn),此參考點(diǎn)作為引入甲板運(yùn)動后使用的著艦引導(dǎo)點(diǎn)。
2) 理想著艦點(diǎn):平靜海面上,艦船勻速直線前進(jìn)狀態(tài)下,為目標(biāo)著艦點(diǎn)的位置,即目標(biāo)著艦點(diǎn)經(jīng)過慣性穩(wěn)定處理后的位置,此參考點(diǎn)作為引入甲板運(yùn)動前使用的著艦引導(dǎo)點(diǎn)。當(dāng)甲板沒有沉浮、橫蕩、縱蕩、縱搖、橫搖、艏搖運(yùn)動時(shí),目標(biāo)著艦點(diǎn)與理想著艦點(diǎn)位置重合。
1.2 坐標(biāo)系定義
1) 艦船坐標(biāo)系(n系):與艦船固連,以艦船質(zhì)心為原點(diǎn),x軸與航母軸線平行,向前為正,z軸與x軸垂直,指天為正,y軸垂直于Oxz平面,其方向按照右手定則確定,向右為正。
2) 著艦慣性坐標(biāo)系(v系):在靜止海平面情況下,以理想著艦點(diǎn)為原點(diǎn),x軸在水平面內(nèi)沿艦跑道速度穩(wěn)定航向指向艦艏,z軸在著艦甲板中心線鉛垂面內(nèi),向上為正。y與x、z軸垂直,水平向右;該坐標(biāo)系是消除艦船的沉浮、橫蕩、縱蕩、縱搖、橫搖、艏搖等影響所使用的一種慣性穩(wěn)定坐標(biāo)系。
3) WGS-84地理坐標(biāo)系(e系)。
4) 衛(wèi)星天線坐標(biāo)系(a系):原點(diǎn)O點(diǎn)為等效天線位置,坐標(biāo)系方向同CGCS2000(ECEF框架)。
5) 理想下滑道:著艦慣性坐標(biāo)系Oxy平面內(nèi),以理想著艦點(diǎn)為目標(biāo)點(diǎn)的下滑軌跡線;理想下滑道與著艦慣性坐標(biāo)系固連。
1.3 坐標(biāo)轉(zhuǎn)換
1.3.1 地理坐標(biāo)系到艦船坐標(biāo)系
按照經(jīng)緯度轉(zhuǎn)換關(guān)系,地理坐標(biāo)系到艦船坐標(biāo)系標(biāo)準(zhǔn)轉(zhuǎn)換矩陣為

(1)
式中:lat表示緯度值;lon表示經(jīng)度值。
1.3.2 艦船坐標(biāo)系到著艦慣性坐標(biāo)系
斜角甲板軸系統(tǒng)是一個(gè)重要的坐標(biāo)系,因?yàn)檫@是無人機(jī)理想著艦點(diǎn)和相應(yīng)航線的關(guān)聯(lián)參考坐標(biāo)系。圖1顯示了龍骨和斜面軸在艦船甲板上的位置[13]。
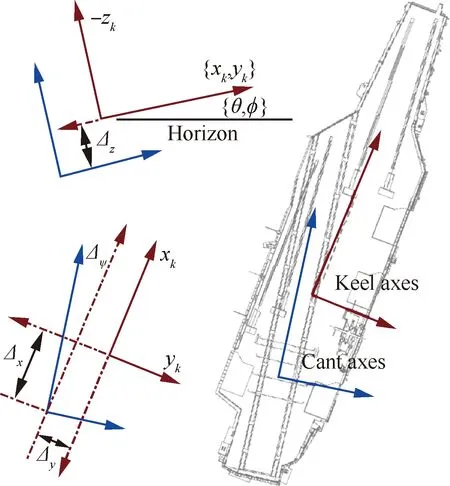
圖1 艦船龍骨到斜角甲板軸坐標(biāo)轉(zhuǎn)換
兩者之間的關(guān)系為
(2)


(3)
式中:θ為俯仰角;φ為滾轉(zhuǎn)角;φ為偏航角。
2 桿臂效應(yīng)與撓曲變形誤差建模
2.1 誤差建模分析
圖2表明,可以簡單地通過將基線矢量r(t)與遠(yuǎn)程參考天線的位置矢量進(jìn)行矢量相加來估算TDP的位置。
基線向量由圖2的連接關(guān)系給出,TDP相對于ECEF觀測器的位置向量:
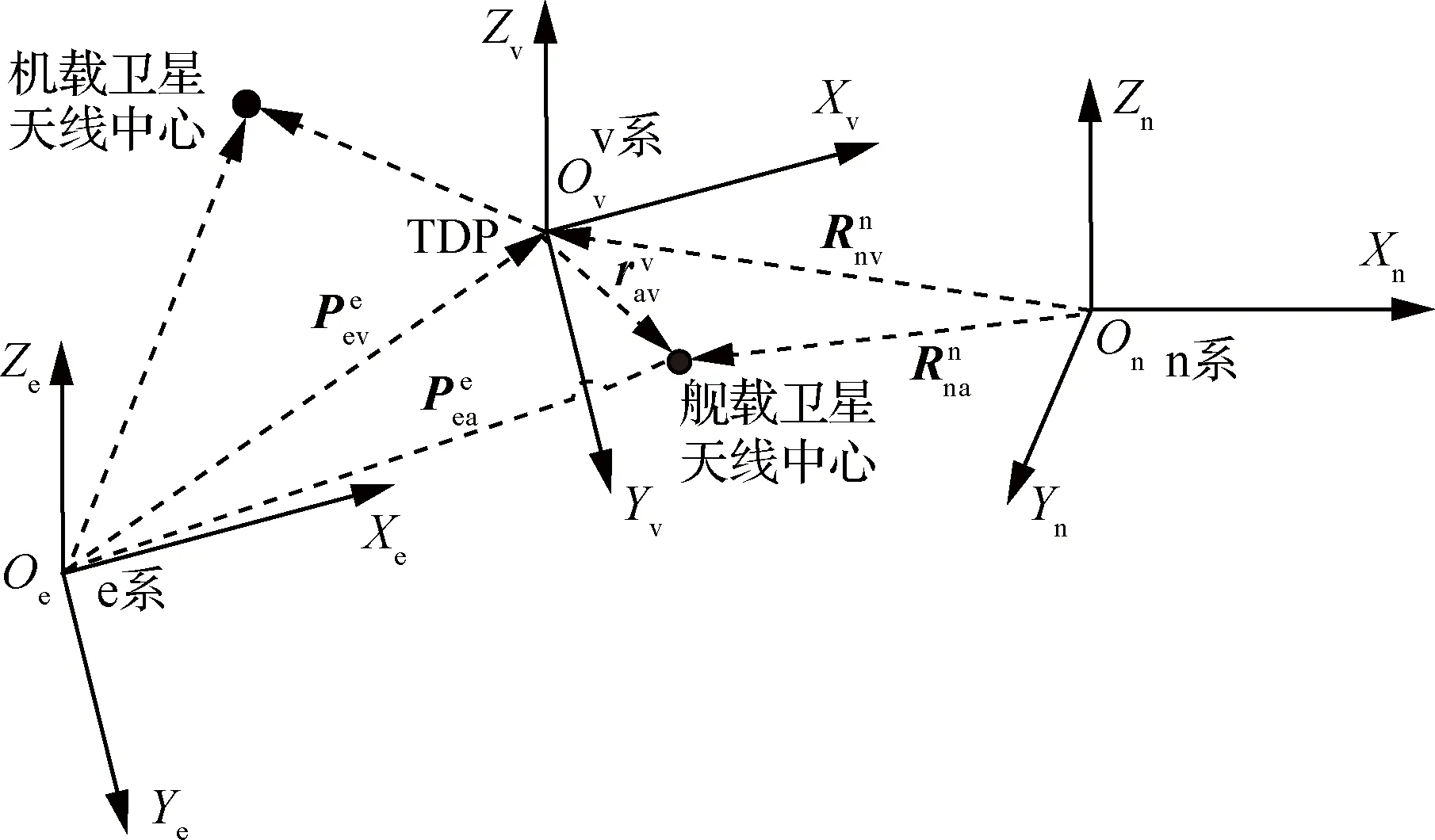
圖2 參考天線與TDP的相對幾何位置
(4)

(5)


(6)

(7)

(8)

(9)

(10)
式中:[ε]w為艦船坐標(biāo)系三軸旋轉(zhuǎn)角的偏差矩陣, 其表達(dá)式為
其中:ε1、ε2、ε3分別為三軸旋轉(zhuǎn)角的偏差值。那么有
(11)

(12)
2.1.3 撓曲變形的誤差模型
艦船的變形能高達(dá)1°~1.5°,隨機(jī)變形是由海浪沖擊、船體運(yùn)動等引起的,其范圍為幾角分到幾十角分[16]。設(shè)初始桿臂長度R0在艦船坐標(biāo)系上的投影為
(13)
式中:x0、y0、z0為初始桿臂的三軸位置。撓曲變形的幾何關(guān)系如圖3所示,撓曲變形角度向量為
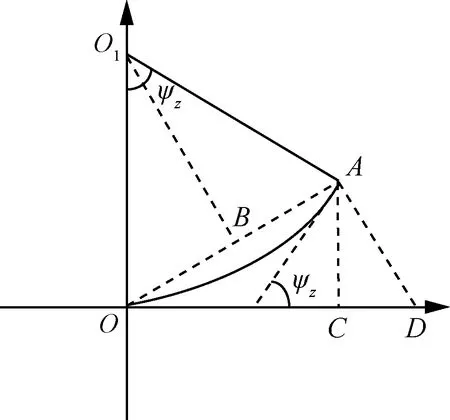
圖3 撓曲變形幾何原理圖
(14)
式中:ψx、ψy、ψz為撓曲變形的三軸角度值。
根據(jù)幾何原理[17-18],z軸幾何關(guān)系為
∠AO1O=2∠AOC=ψz
半徑與弧長關(guān)系為
故可得
根據(jù)三角函數(shù)關(guān)系可得
綜上,其他軸向計(jì)算方式類似,可得撓曲變形后的桿臂坐標(biāo)為
(15)
船體撓曲變形角可以認(rèn)為是隨機(jī)力函數(shù)激發(fā)的隨機(jī)變量,即白噪聲激發(fā)的馬爾可夫過程。考慮二階馬爾可夫過程,模型為[19]
(16)

2.2 誤差模型仿真
誤差模型仿真步驟如下:
步驟1首先利用二階馬爾可夫過程求出船體撓曲變形角ψx、ψy、ψz。



假設(shè)桿臂距離R0=[39.2024.23-33.54]Tm,文獻(xiàn)[6,20]討論使用的杜魯門號航母(CVN 75)號海上試驗(yàn)數(shù)據(jù)收集中使用的測量基線一致天線擺放位置如圖4所示。甲板撓曲變形繞x、y、z軸方向的方差分別為10′、6′、8′,相關(guān)時(shí)間分別為100、80、60 s,甲板的撓曲變形由二階馬爾可夫過程模擬。
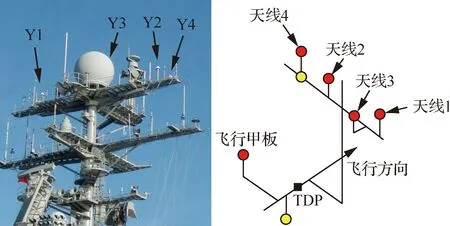
圖4 “杜魯門”號航母上的衛(wèi)星天線及TDP點(diǎn)位置
如圖5~圖8所示,在已知撓曲變形和動態(tài)桿臂變化特性的條件下,使用Kalman濾波器[21]可以有效估計(jì)撓曲變形和動態(tài)桿臂。從圖5的數(shù)值上來看,撓曲變形角的改變量的范圍為幾角分到幾十角分,與文獻(xiàn)[16]描述的隨機(jī)變形范圍基本一致,圖6~圖8撓曲形變和動態(tài)桿臂引起的誤差范圍在0.01~0.3 m之間,與文獻(xiàn)[15]描述的誤差范圍基本一致,證明了所建立的撓曲變形系統(tǒng)誤差模型的準(zhǔn)確性。
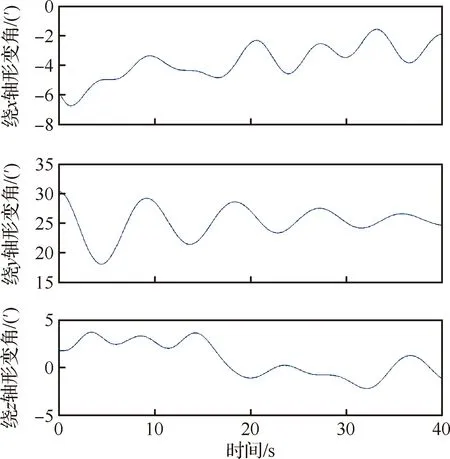
圖5 使用Kalman濾波的撓曲變形角估計(jì)
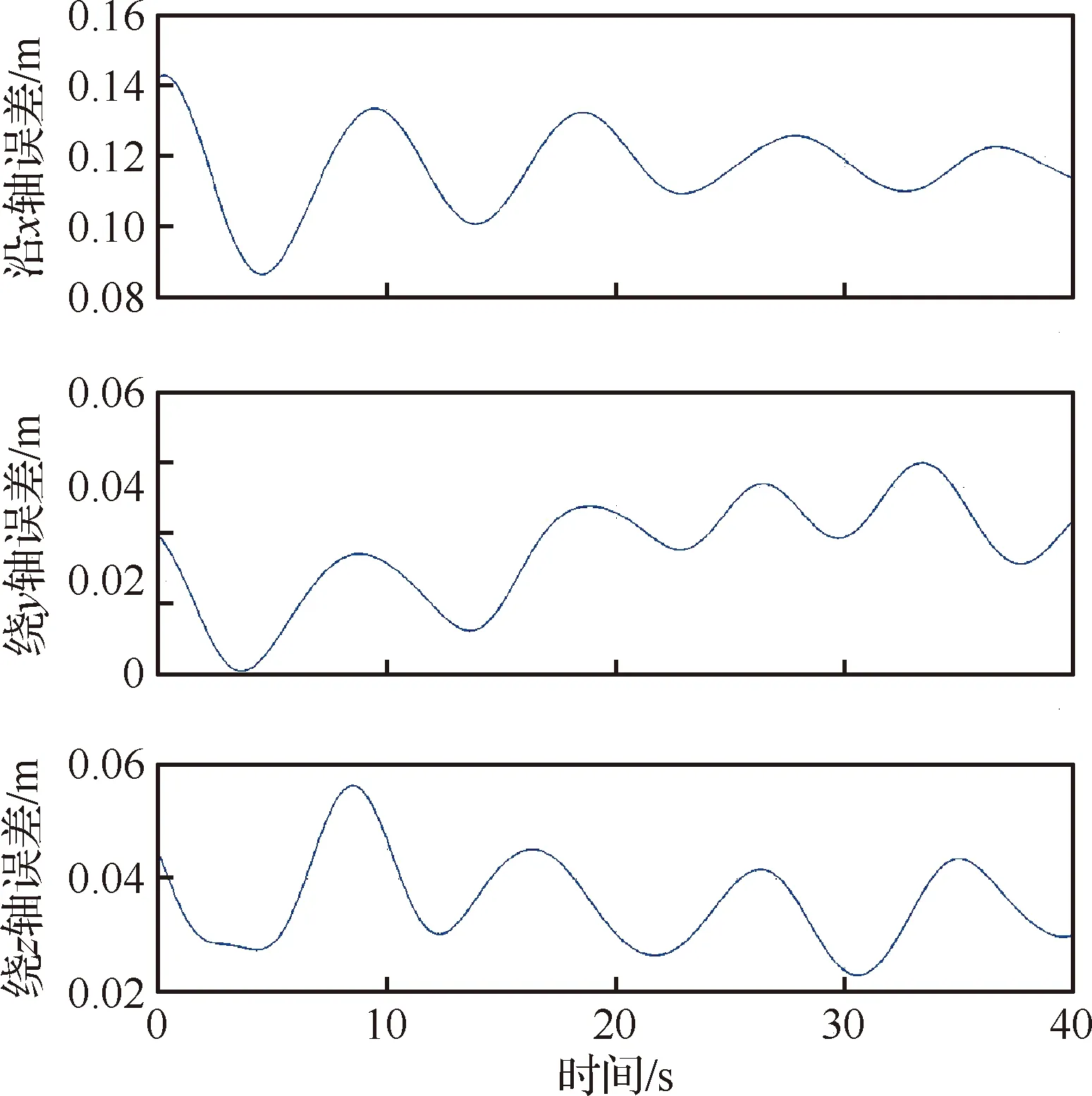
圖6 使用Kalman濾波的撓曲形變導(dǎo)致的誤差
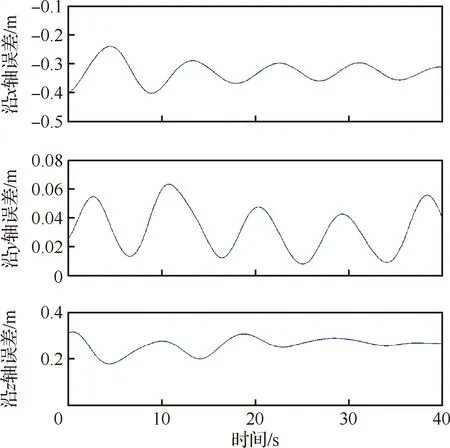
圖7 使用Kalman濾波的動態(tài)桿臂導(dǎo)致的誤差
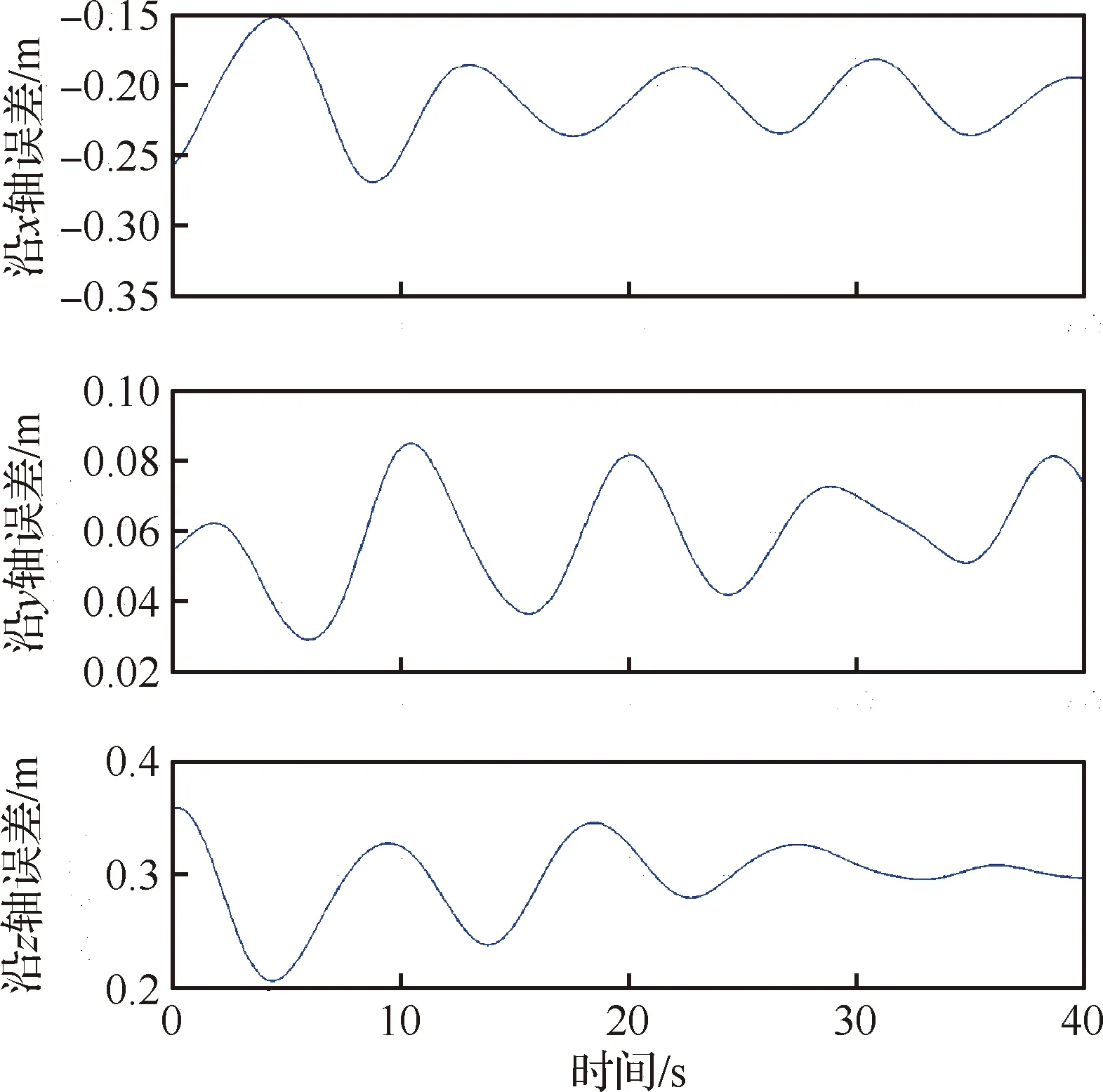
圖8 撓曲形變和動態(tài)桿臂的綜合誤差
3 飛機(jī)及艦船運(yùn)動方程
3.1 飛機(jī)運(yùn)動方程
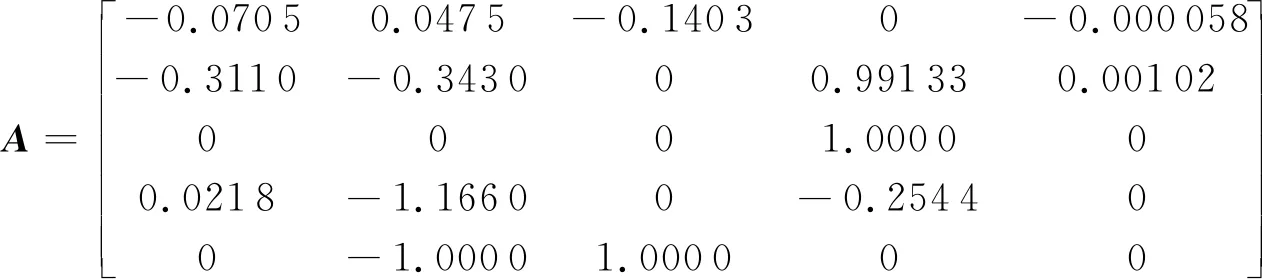
F/A-18飛機(jī)著艦時(shí)的基準(zhǔn)狀態(tài)[22]為:飛行高度為海平面高度;初始速度V0為70 m/s;基準(zhǔn)航跡角γ0為-3.5°;配平迎角α0為8.1°。艦載機(jī)利用該配平條件的參數(shù)直線航行,其小擾動方程[23]為
(17)
式中:x=[V/V0αθqh/V0]T為狀態(tài)向量;u=[δeδP]T為控制向量;y=[γnz/V0Vαθqh]T為輸出向量;V為飛機(jī)速度;α為迎角;θ為俯仰角;q為俯仰角速度;h為高度;δe為升降舵偏角;δP為油門桿位置;γ為航跡傾斜角;nz為縱向過載。
3.2 艦船甲板運(yùn)動與補(bǔ)償
甲板運(yùn)動在國外尤其是美國已被廣泛研究,經(jīng)過大量的實(shí)測數(shù)據(jù)的計(jì)算與分析,這些運(yùn)動可以被合理假設(shè)為具有窄頻帶的平穩(wěn)隨機(jī)過程,并且可以用不同正弦波的疊加來簡化地描述這種運(yùn)動。在中等海況下,某型號航空母艦以30 kn的典型的速度行駛時(shí),由海浪、風(fēng)等因素的作用會產(chǎn)生俯仰、橫滾、偏擺與沉浮等甲板運(yùn)動,其模型描述為[24]
沉浮(垂蕩)運(yùn)動:
zs=1.22sin(0.6t)+0.3sin(0.2t)
(18)
俯仰(縱搖)運(yùn)動:
θs=0.5sin(0.6t)+0.3sin(0.63t)+0.25
(19)
橫滾(橫搖)運(yùn)動:
φs=2.5sin(0.5t)+3.0sin(0.52t)+0.5
(20)
偏擺(艏搖)運(yùn)動:
ψs=0.25sin(0.7t)+0.5sin(0.1t)
(21)
在甲板運(yùn)動的縱向補(bǔ)償中,主要是甲板垂直高度和俯仰角的變化,由于在生成指令與控制飛機(jī)之間存在延遲,延遲時(shí)間大約在1~2 s之間,所以校正網(wǎng)絡(luò)應(yīng)采用超前網(wǎng)絡(luò)。艦載飛機(jī)自動著艦導(dǎo)引系統(tǒng)設(shè)計(jì)了甲板運(yùn)動補(bǔ)償器(Deck Motion Compensation, DMC)進(jìn)行自動著艦導(dǎo)引系統(tǒng)補(bǔ)償:
(22)
如圖9所示,甲板運(yùn)動補(bǔ)償器相位延遲小,飛機(jī)運(yùn)動跟蹤甲板運(yùn)動的跟蹤能力較強(qiáng)。
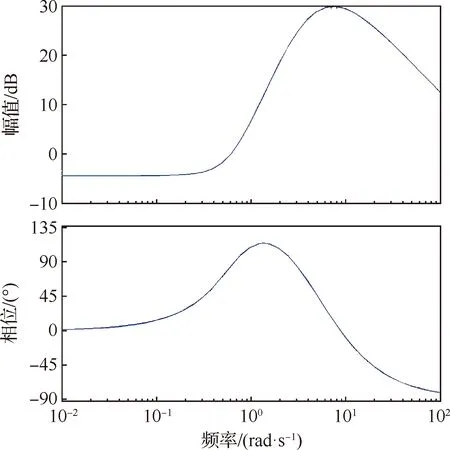
圖9 DMC bode圖
3.3 縱向?qū)б刂葡到y(tǒng)
結(jié)合艦船甲板運(yùn)動、艦尾流及艦載機(jī)縱向飛行控制模型,建立了如圖10所示的仿真系統(tǒng)架構(gòu),同時(shí)對縱向?qū)б刂葡到y(tǒng)進(jìn)行設(shè)計(jì),如圖11所示。
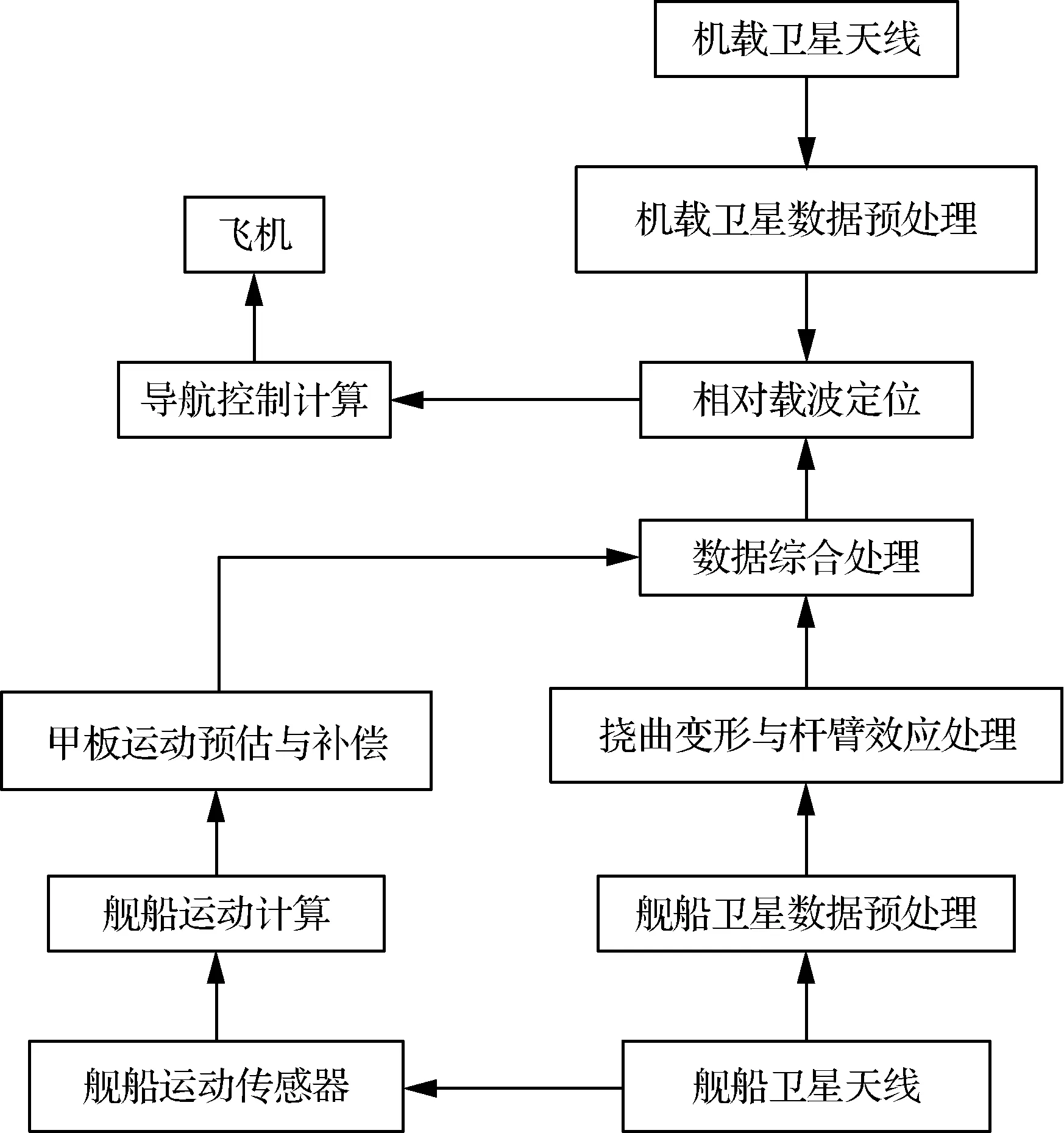
圖10 基于衛(wèi)星引導(dǎo)的全自動著艦仿真架構(gòu)示意圖
縱向?qū)б刂葡到y(tǒng)由自動飛行控制系統(tǒng)(Automatic Flight Control System, AFCS)、進(jìn)場動力補(bǔ)償系統(tǒng)(Approach Power Compensation System, APCS)和導(dǎo)引系統(tǒng)所組成,艦載飛機(jī)要通過導(dǎo)引控制系統(tǒng)準(zhǔn)確地降落在航空母艦甲板的阻攔區(qū)域內(nèi),必須對下滑軌跡進(jìn)行精確控制。
自動飛行控制系統(tǒng)主要是通過升降通道,對飛機(jī)短周期運(yùn)動姿態(tài)進(jìn)行控制,來改變飛機(jī)的下滑軌跡,并按預(yù)定的下滑軌跡進(jìn)行降落。同時(shí)由進(jìn)場動力補(bǔ)償系統(tǒng)控制飛機(jī)的迎角和速度,以保證下滑期間飛機(jī)運(yùn)動的穩(wěn)定性并保持航跡角不變。
艦載機(jī)縱向?qū)б刂葡到y(tǒng)結(jié)構(gòu)如圖11所示。圖中,αg為理想迎角輸入,hg為理想高度輸入。
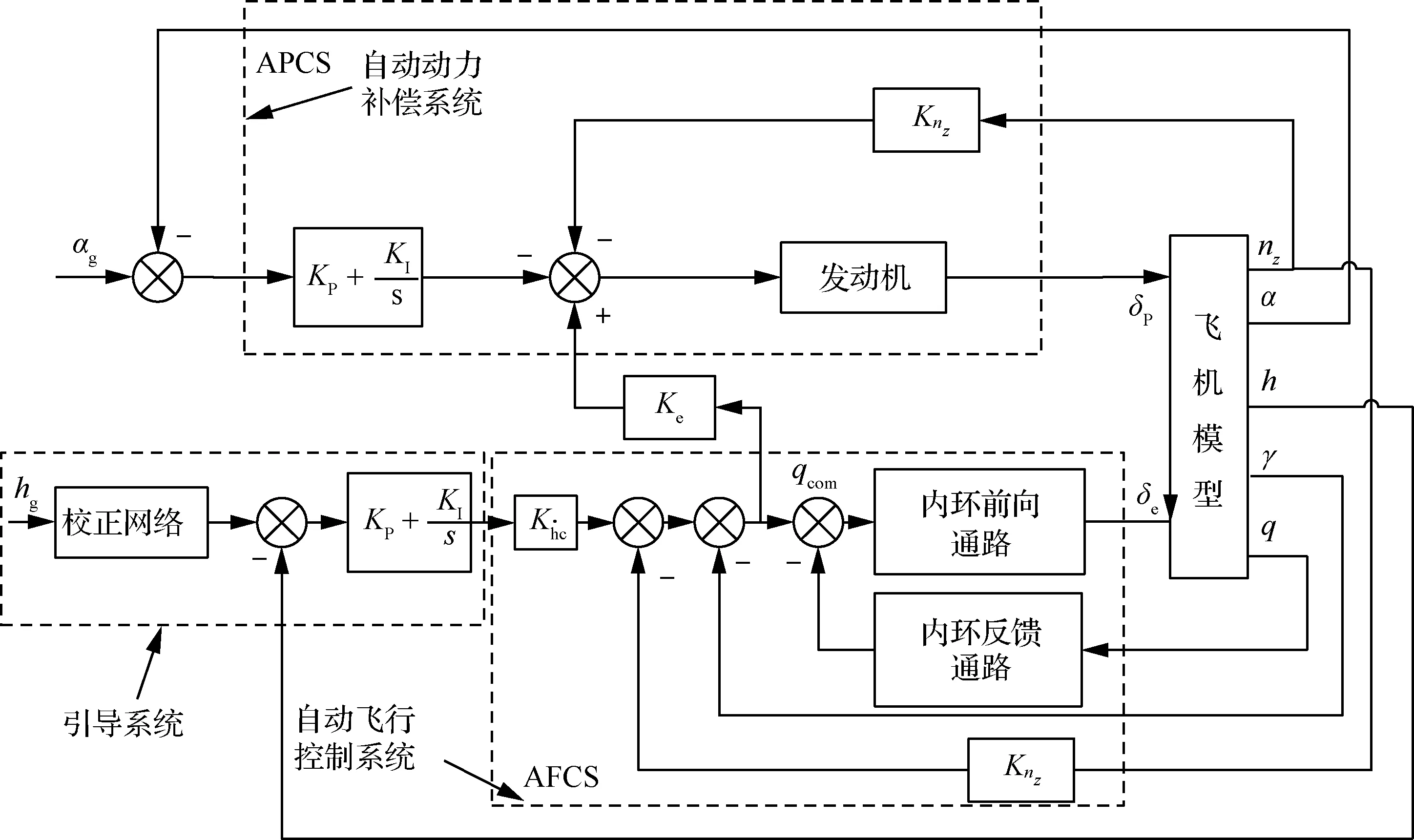
圖11 縱向?qū)б刂葡到y(tǒng)結(jié)構(gòu)
4 綜合仿真結(jié)果
艦船縱搖、橫搖、航向、沉浮運(yùn)動使用本文中的甲板運(yùn)動模型,艦船在中等海況下以10 m/s的速度勻速航行,航母甲板高度21.1 m,飛機(jī)在距離艦尾1 524 m,距離海面114.3 m位置著艦,其他數(shù)據(jù)按本文定義。
圖12為某一次甲板隨機(jī)運(yùn)動不考慮誤差模型時(shí)甲板運(yùn)動實(shí)際高度與12.5秒前使用的甲板高度變化,仿真中在著艦前12.5 s加入甲板運(yùn)動。
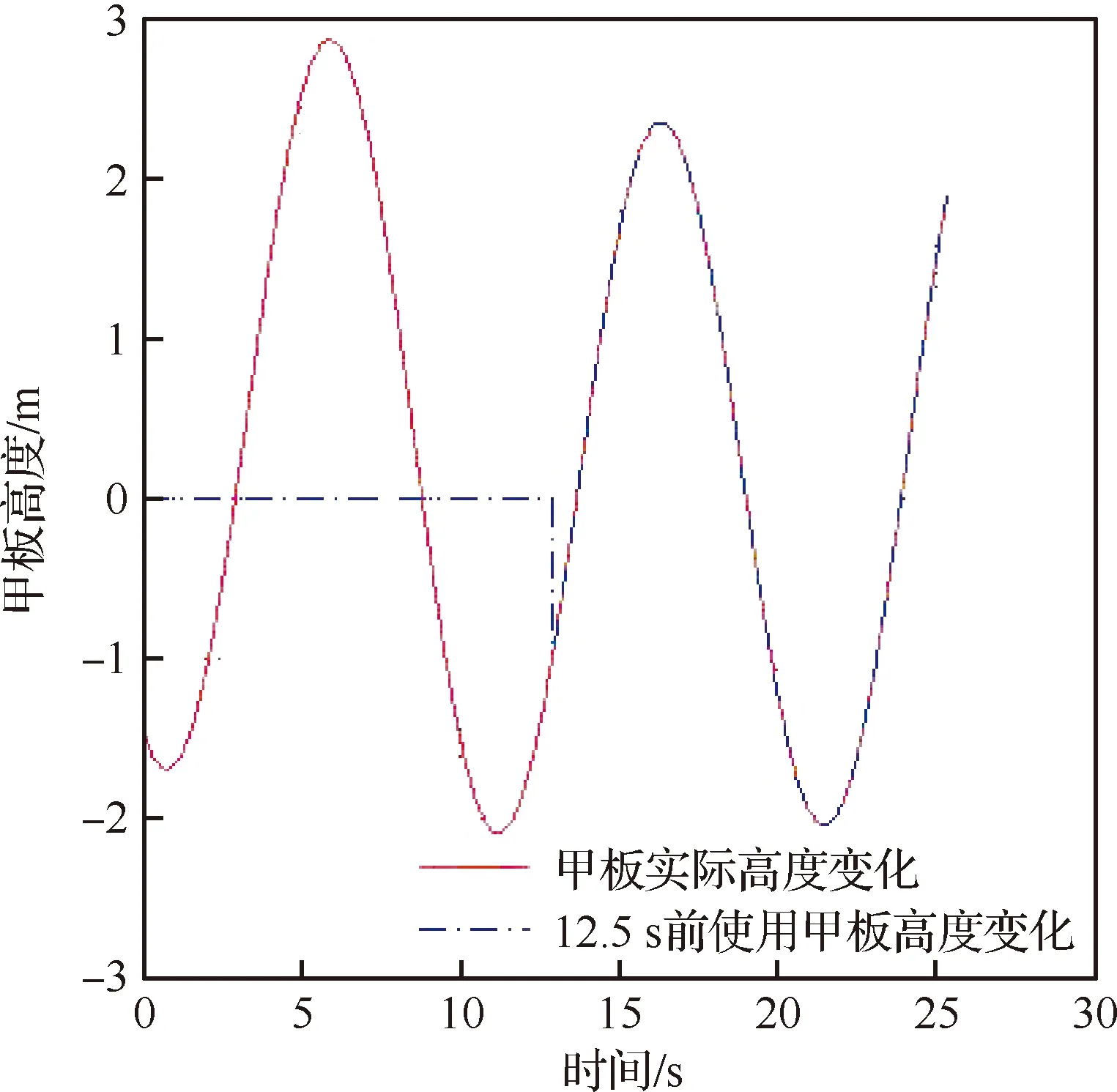
圖12 不考慮誤差模型時(shí)甲板運(yùn)動仿真
圖13是在圖12不考慮誤差模型時(shí)的飛機(jī)著艦過程仿真,從圖中可以看出,在甲板運(yùn)動加入控制系統(tǒng)初期,因系統(tǒng)中突然加入該項(xiàng)變量,控制系統(tǒng)存在一定糾偏過程,在后面的控制過程中,飛機(jī)跟隨下滑道效果良好,說明設(shè)計(jì)的控制系統(tǒng)在不考慮誤差模型的情況下能夠較好的完成著艦過程。
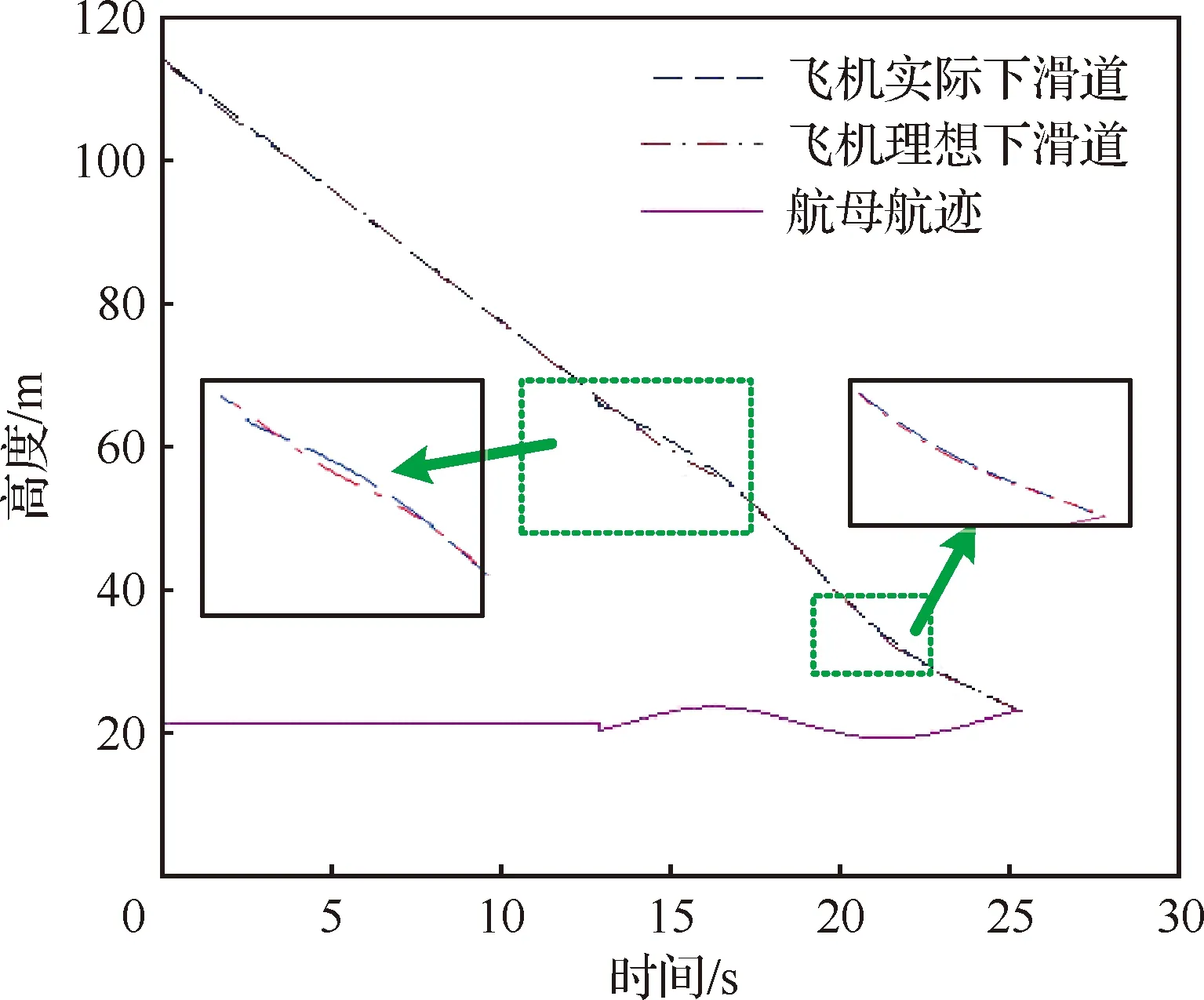
圖13 不考慮誤差模型時(shí)飛機(jī)著艦過程仿真
圖14為不考慮誤差模型時(shí),每次隨機(jī)選取甲板運(yùn)動的初始位置,仿真100次的著艦落點(diǎn)偏差情況,著艦落點(diǎn)分布在-9.6~4.5 m之間,滿足偏差等級分類標(biāo)準(zhǔn)[25],如表1所示。且著艦落點(diǎn)偏差滿足置信度為1σ(68.3%)、均值為-2.47 m的置信區(qū)間,為-2.83~-2.09 m,說明本文設(shè)計(jì)的控制系統(tǒng)能夠滿足著艦的使用需求。
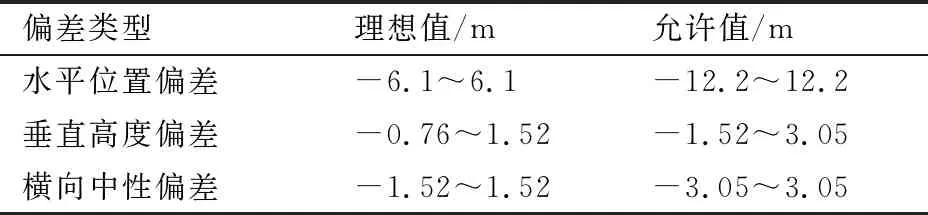
表1 著艦偏差等級分類
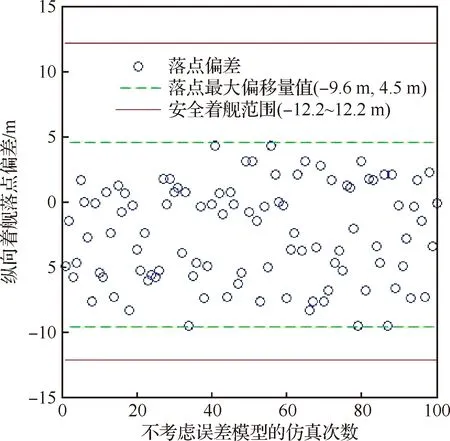
圖14 不考慮誤差模型時(shí)著艦落點(diǎn)偏差情況
圖15是在圖12相同甲板運(yùn)動基礎(chǔ)上考慮水平方向和垂直方向的誤差模型時(shí)仿真甲板運(yùn)動實(shí)際高度與12.5 s前使用的甲板高度變化,可以看出,在考慮誤差模型后,12.5 s前甲板實(shí)際使用高度有所變化。
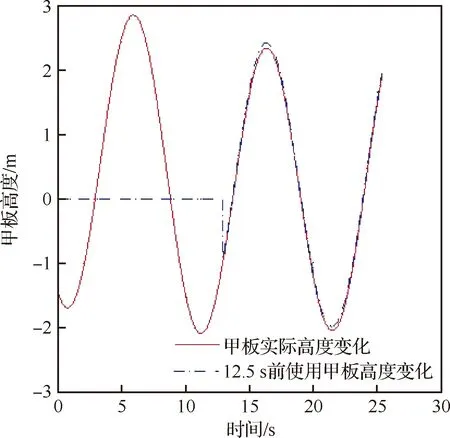
圖15 考慮誤差模型時(shí)甲板運(yùn)動仿真
圖16是在圖15考慮誤差模型時(shí)的飛機(jī)著艦過程仿真,該著艦過程與不考慮誤差模型時(shí)的控制效果一致,說明設(shè)計(jì)的控制系統(tǒng)在考慮誤差模型的情況下仍能夠較好的完成著艦過程。
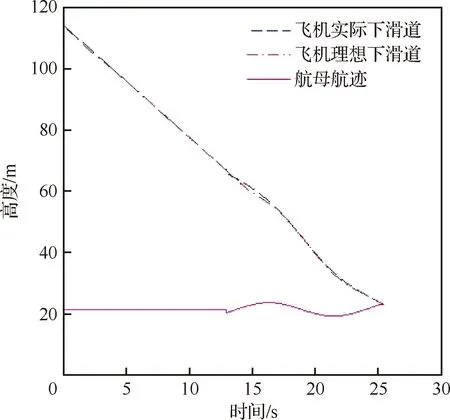
圖16 考慮誤差模型時(shí)飛機(jī)著艦過程仿真
圖17是在圖14相同著艦條件下(兩組仿真對應(yīng)次數(shù)甲板運(yùn)動相同,保證影響因素只有誤差模型)仿真100次著艦落點(diǎn)偏差情況,著艦落點(diǎn)分布在-9.73~4.12 m之間,滿足偏差等級分類標(biāo)準(zhǔn)(表1),且著艦落點(diǎn)偏差滿足置信度為1σ(68.3%)、均值為-2.747 m的置信區(qū)間,為-3.12~-2.38 m, 說明考慮誤差模型后,設(shè)計(jì)的控制系統(tǒng)仍能夠滿足著艦的使用需求。

圖17 考慮誤差模型時(shí)著艦落點(diǎn)偏差情況
圖18為有/無誤差模型兩組仿真數(shù)據(jù)落點(diǎn)位置相對移動情況,如圖所示,兩組仿真落點(diǎn)偏差的均值相對移動為0.3 m,落點(diǎn)偏差相對移動最大值為1.4 m,說明誤差模型對著艦落點(diǎn)精度有顯著影響。

圖18 有/無誤差模型兩組仿真數(shù)據(jù)落點(diǎn)位置相對移動情況
根據(jù)圖19和圖20控制系統(tǒng)的規(guī)律可以看出,引入誤差模型前后,控制系統(tǒng)規(guī)律沒有發(fā)生變化,且相對于著艦落點(diǎn)偏差來說,控制效果良好。
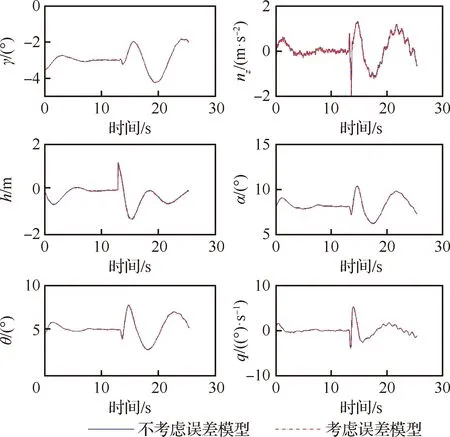
圖19 有/無誤差模型控制系統(tǒng)的規(guī)律
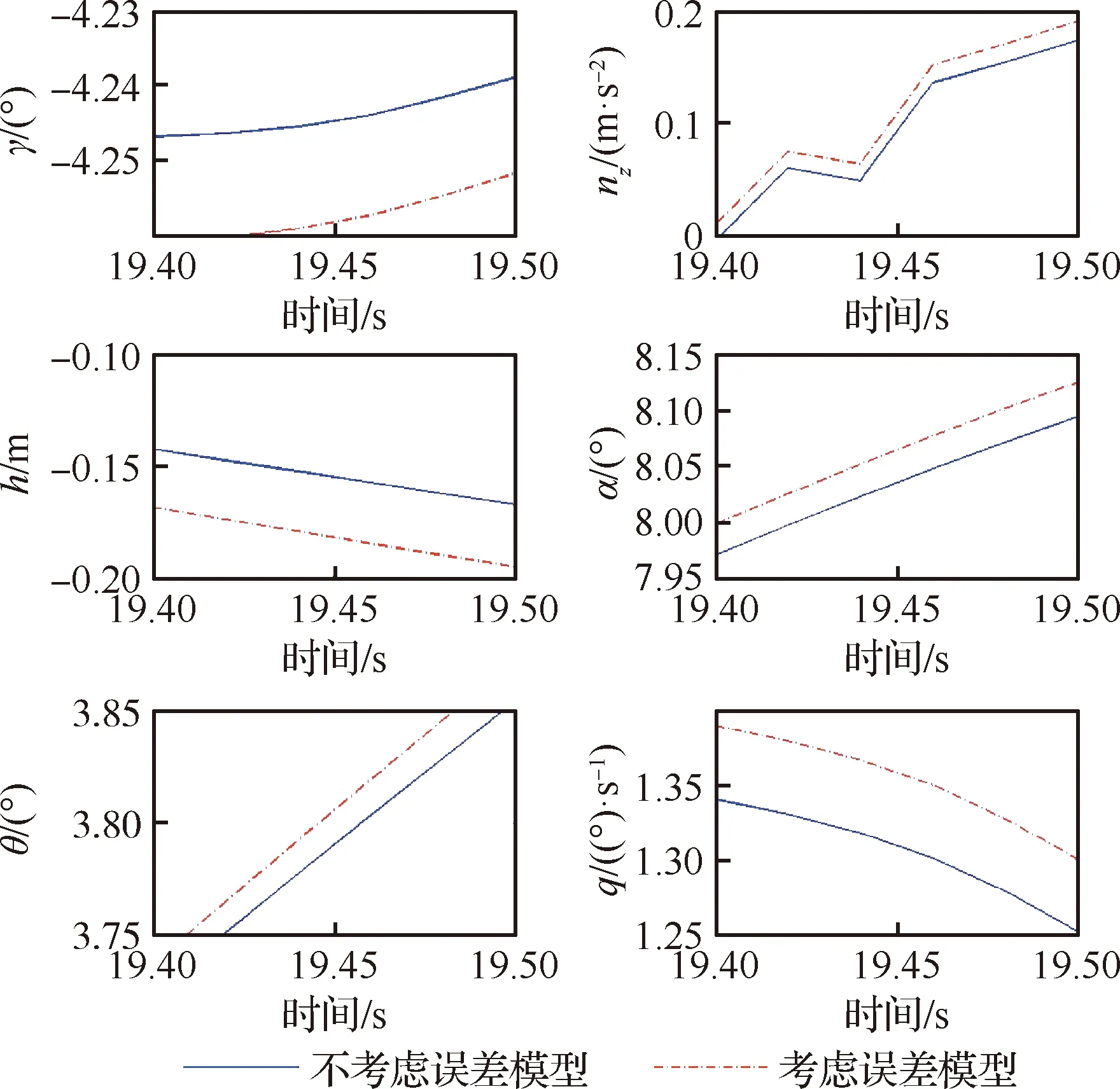
圖20 有/無誤差模型控制系統(tǒng)的規(guī)律(局部放大)
5 結(jié) 論
基于衛(wèi)星引導(dǎo)的全自動著艦技術(shù),理論上使用了艦載機(jī)上衛(wèi)星數(shù)據(jù)與艦船上衛(wèi)星數(shù)據(jù)的相對位置信息,為了實(shí)現(xiàn)精準(zhǔn)著艦,需要將機(jī)艦衛(wèi)星間的相對位置轉(zhuǎn)化到從飛機(jī)尾鉤至艦船理想著艦點(diǎn)的相對位置。從艦船角度上考慮,需要將GPS參考站位置信息轉(zhuǎn)化到理想著艦點(diǎn),在數(shù)據(jù)轉(zhuǎn)化過程中,存在由于艦船姿態(tài)變化和甲板撓曲變形導(dǎo)致的理想著艦點(diǎn)位置信息不準(zhǔn)確的問題。針對上述問題,開發(fā)了一種基于衛(wèi)星引導(dǎo)的全自動著艦非線性化參數(shù)誤差模型,同時(shí)結(jié)合艦船甲板運(yùn)動及艦載機(jī)縱向飛行控制模型,評估了艦船結(jié)構(gòu)撓曲變形和姿態(tài)不確定性對著艦落點(diǎn)精度的精度的影響。
仿真結(jié)果表明,艦船結(jié)構(gòu)變形和姿態(tài)不確定性本身帶來的誤差已經(jīng)超過載波相位差分定位精度0.3~0.4 m,同時(shí)在基于衛(wèi)星引導(dǎo)的全自動著艦閉環(huán)仿真中,艦船結(jié)構(gòu)變形和姿態(tài)不確定性帶來的估計(jì)誤差影響著艦落點(diǎn)精度。從縱向著艦落點(diǎn)偏差來看,在相同著艦條件下,估計(jì)誤差帶來的落點(diǎn)偏差最大值移動大約為1.4 m;從著艦散布偏差來看,不加入估計(jì)誤差時(shí),著艦落點(diǎn)偏差滿足置信度為1σ的置信區(qū)間為-2.83~-2.09 m, 加入估計(jì)誤差后,著艦落點(diǎn)偏差滿足置信度為1σ的置信區(qū)間為-3.12~-2.38 m。
根據(jù)上述分析,得出如論:在進(jìn)行全自動著艦過程中,艦船結(jié)構(gòu)變形和姿態(tài)不確定性對著艦落點(diǎn)精度有顯著影響,在閉環(huán)系統(tǒng)引入這兩種誤差后,利用本文建立的縱向控制系統(tǒng),仍能夠?qū)⑷詣又灺潼c(diǎn)偏差約束在等級分類標(biāo)準(zhǔn)的允許范圍內(nèi)。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
中華詩詞(2020年1期)2020-09-21 09:24:52
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
小學(xué)生作文(中高年級適用)(2018年5期)2018-06-11 01:22:56
數(shù)學(xué)小靈通·3-4年級(2017年10期)2017-11-08 08:42:59
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2017年11期)2017-04-23 07:18:00
數(shù)學(xué)大王·中高年級(2016年12期)2016-12-26 21:37:36
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
核科學(xué)與工程(2015年4期)2015-09-26 11:59:03