飛機(jī)力提示智能側(cè)桿控制器設(shè)計(jì)方法
2021-10-28 06:33:44許舒婷譚文倩屈香菊
航空學(xué)報(bào) 2021年8期
許舒婷,譚文倩, 2,*,屈香菊
1. 北京航空航天大學(xué) 航空科學(xué)與工程學(xué)院,北京 100191
2. 北京航空航天大學(xué) 江西研究院,南昌 330000
操縱桿作為飛機(jī)與駕駛員的人機(jī)交互界面,在飛行控制系統(tǒng)中起著至關(guān)重要的作用[1-3]。在早期機(jī)械操縱系統(tǒng)中,傳統(tǒng)操縱桿/輪通過機(jī)械裝置連接直接到控制面上[4-5],駕駛員通過施加在操縱桿的力來調(diào)節(jié)控制面的偏轉(zhuǎn)。隨著電傳操縱技術(shù)的發(fā)展,飛機(jī)的操縱桿可以不用通過傳統(tǒng)的機(jī)械裝置與控制面連接,在此基礎(chǔ)上發(fā)展的側(cè)桿操縱成為具有競爭力的操縱方式[6-7],與傳統(tǒng)的操縱桿/輪相比,側(cè)桿操縱系統(tǒng)具有桿力輕,重量小,結(jié)構(gòu)簡單,并能改善視野等優(yōu)點(diǎn);同時也帶來了不利的影響,由于電傳操縱飛機(jī)的桿力采用無回力操縱,飛機(jī)氣動舵面的鉸鏈力矩不傳到駕駛桿,切斷了駕駛員與飛機(jī)控制面之間的機(jī)械連接,駕駛員不能直觀感受到飛機(jī)的飛行狀態(tài)信息,容易引發(fā)人機(jī)不良耦合問題。由此提出了主動側(cè)桿的概念[8-11],主動側(cè)桿在每個運(yùn)動軸上都有伺服舵機(jī),通過與飛機(jī)狀態(tài)信息相關(guān)的電信號控制人感系統(tǒng)特性,能夠?qū)w機(jī)狀態(tài)信息以觸覺反饋給駕駛員,如抖桿/振桿、桿中立位置變化、軟停止、硬停止等,駕駛員通過主動側(cè)桿可以獲得一定的飛機(jī)飛行狀態(tài)信息,從而提高駕駛員的情景意識,改善飛行品質(zhì)。
自2009年,美國Systems Technology Inc.的Klyde和Mcruer提出了智能側(cè)桿(Smart-Cue/Gain system)的概念[12],近年來,智能側(cè)桿技術(shù)受到了人們的關(guān)注[13-18]。2017年,在美國國家航空航天局(NASA)航空安全技術(shù)項(xiàng)目第2階段的創(chuàng)新項(xiàng)目中,提出了一種典型智能側(cè)桿——智能自適應(yīng)飛行有效提示系統(tǒng)(Smart Adaptive Flight Effective Cue,SAFE-Cue),用于預(yù)防駕駛員誘發(fā)振蕩引起的人機(jī)系統(tǒng)失控問題的研究,并進(jìn)行了人在環(huán)空中飛行模擬器仿真試驗(yàn),取得了減緩失控的效果[19-21]。智能側(cè)桿與主動側(cè)桿相比,智能側(cè)桿控制器設(shè)計(jì)的思想是在改善飛行品質(zhì)的基礎(chǔ)上,進(jìn)一步考慮提高飛行安全性,例如,通過操縱桿的力提示,來預(yù)防或減緩故障情況下的失控、實(shí)現(xiàn)飛行安全邊界保護(hù)。表1為操縱桿的發(fā)展過程及特點(diǎn)。
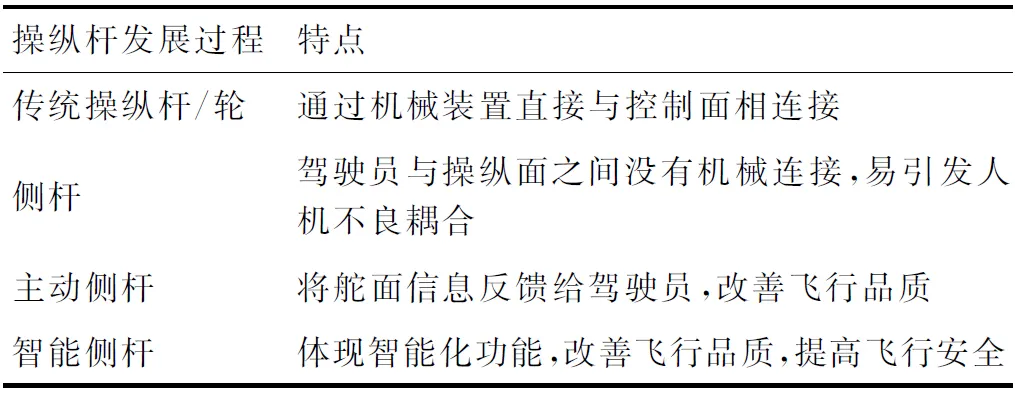
表1 操縱桿的發(fā)展過程及特點(diǎn)
操縱桿力提示控制器是針對飛機(jī)在故障或邊界狀態(tài)飛行而設(shè)計(jì)的,其作用是通過附加桿力來提示駕駛員,以便駕駛員及時采取合適的控制策略。智能側(cè)桿引導(dǎo)的人機(jī)系統(tǒng)有2個突出的特點(diǎn):① 當(dāng)飛機(jī)遭遇突發(fā)故障或靠近飛行安全邊界時,飛機(jī)的動力學(xué)特性會出現(xiàn)明顯的變化;② 駕駛員在力提示下,會改變控制策略。所以,智能側(cè)桿引導(dǎo)的人機(jī)系統(tǒng)具有時變和非線性特性。通常的基于線性系統(tǒng)理論的人機(jī)系統(tǒng)模型和飛行品質(zhì)評價(jià)準(zhǔn)則不適用于智能操縱桿的設(shè)計(jì)。例如,McRuer擬線性駕駛員模型、經(jīng)典的Hess結(jié)構(gòu)駕駛員模型、最優(yōu)駕駛員模型、描述函數(shù)駕駛員模型等[22-26]主要通過數(shù)學(xué)模型形式分析駕駛員在正常狀態(tài)下的行為,用以描述駕駛員在連續(xù)操縱條件下的擬線性和時不變特性,但不適用于當(dāng)前人機(jī)系統(tǒng)的時變特性分析。傳統(tǒng)人機(jī)系統(tǒng)評價(jià)方法,如帶寬準(zhǔn)則、Neal-Smith準(zhǔn)則、Gibson相位速率準(zhǔn)則、同一理論等[27-28]主要針對被控對象不隨時間變化的情況,用以研究時不變?nèi)藱C(jī)系統(tǒng)的頻域特性,但這種經(jīng)典的頻譜分析方法無法體現(xiàn)系統(tǒng)的時變特性。
對于時變系統(tǒng)的駕駛員控制模型和飛行品質(zhì)評價(jià)準(zhǔn)則的研究,近幾年取得了一定的進(jìn)展,主要包括,Hess針對飛機(jī)動態(tài)特性變化提出的變策略駕駛員控制模型[29],Klyde等基于小波分析建立的時-頻-譜評價(jià)準(zhǔn)則[30-31]。本文在此基礎(chǔ)上,建立力提示智能側(cè)桿引導(dǎo)的時變?nèi)藱C(jī)系統(tǒng)模型的側(cè)桿控制器設(shè)計(jì)的理論方法。為此,面臨的具體問題是David H. Klyde提出的時-頻-譜評價(jià)準(zhǔn)則是基于智能桿引導(dǎo)的駕駛員在環(huán)的試驗(yàn)研究,建立基于模型的設(shè)計(jì)方法,還需要建立人機(jī)控制系統(tǒng)模型。Hess提出的變策略駕駛員控制模型考慮了人對故障的自適應(yīng)性,但并不體現(xiàn)操縱桿力提示實(shí)現(xiàn)人機(jī)附加的信息交互。基于已有的研究進(jìn)展和面臨的具體問題,本文的主要貢獻(xiàn)是:通過分析飛機(jī)故障/邊界狀態(tài)下的動力學(xué)突變特點(diǎn),提出力提示下智能側(cè)桿控制器的設(shè)計(jì)思路;基于帶智能側(cè)桿控制器的人機(jī)系統(tǒng)模型,結(jié)合時-頻-譜評價(jià)準(zhǔn)則和駕駛員跟蹤誤差特性得到的任務(wù)質(zhì)量指標(biāo),提出力提示下智能側(cè)桿控制器的理論設(shè)計(jì)方法。通過實(shí)例仿真,闡明智能側(cè)桿控制器減緩人機(jī)系統(tǒng)振蕩的機(jī)理,并檢驗(yàn)所提出的力提示側(cè)桿控制器設(shè)計(jì)方法的效果。
1 智能側(cè)桿引導(dǎo)的人機(jī)系統(tǒng)結(jié)構(gòu)
根據(jù)智能側(cè)桿的不同功能,分析人機(jī)界面交互的特點(diǎn),構(gòu)建智能側(cè)桿引導(dǎo)的人機(jī)系統(tǒng)物理圖如圖1所示。與傳統(tǒng)的主動側(cè)桿相比,區(qū)別是智能側(cè)桿可以將飛機(jī)故障或邊界保護(hù)信息以觸覺的形式反饋給駕駛員,幫助駕駛員進(jìn)行判斷決策,安全高效控制飛行。所構(gòu)建的人機(jī)系統(tǒng)包括駕駛員模型、智能側(cè)桿模型和飛機(jī)與飛控系統(tǒng)動力學(xué)模型。當(dāng)飛機(jī)遭遇突發(fā)故障或靠近飛行安全邊界時,飛機(jī)飛控系統(tǒng)會將故障信息或邊界保護(hù)信息傳遞給智能側(cè)桿,智能側(cè)桿通過自身的智能計(jì)算系統(tǒng)將該信息轉(zhuǎn)變?yōu)楣收匣蜻吔绫Wo(hù)提示信號,并通過人感系統(tǒng)以觸覺提示的形式反饋給駕駛員,引導(dǎo)駕駛員改變操縱策略。
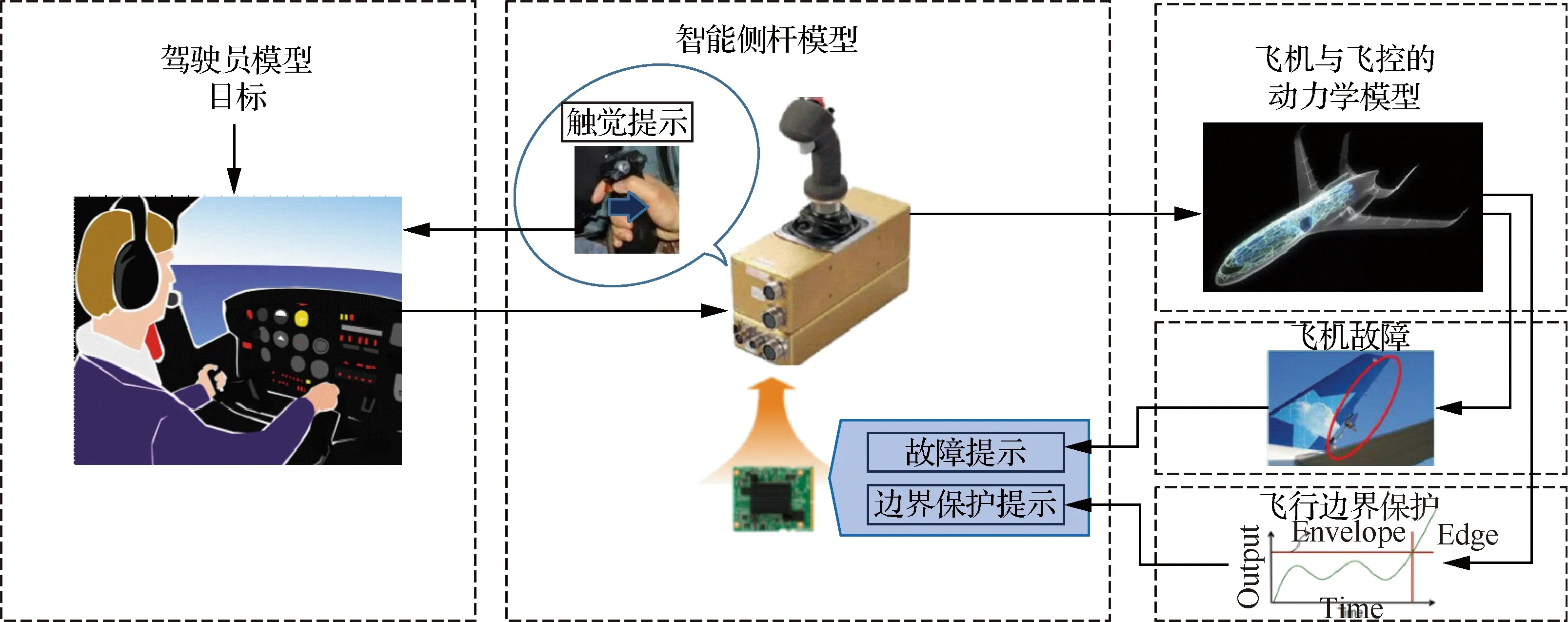
圖1 智能側(cè)桿引導(dǎo)的人機(jī)系統(tǒng)物理圖Fig.1 Physical diagram of pilot-aircraft system with smart side-stick
以給駕駛員力提示的智能側(cè)桿為例,建立智能側(cè)桿引導(dǎo)的人機(jī)系統(tǒng)結(jié)構(gòu)模型如圖2所示。圖中,駕駛員從顯示界面得到飛機(jī)的狀態(tài)信息,從智能側(cè)桿得到飛機(jī)的故障/邊界保護(hù)信息,對上述信息進(jìn)行判斷決策后,對智能側(cè)桿進(jìn)行操縱;智能側(cè)桿通過將飛機(jī)故障/邊界保護(hù)信息轉(zhuǎn)換成力提示信息,反饋給駕駛員,提示駕駛員改變操縱策略,同時將駕駛員桿力信號轉(zhuǎn)換成桿位移信號,作用于飛機(jī),進(jìn)而完成對飛機(jī)的控制。圖中:r為輸入指令信號;e為誤差信號;Fs為駕駛員的桿力輸入信號;Fcue為智能側(cè)桿的力提示信號;δs為操縱桿人感系統(tǒng)的桿位移輸出;y為飛機(jī)與飛行控制系統(tǒng)的輸出信號;yerr為飛機(jī)故障提示信息;yFEP為飛機(jī)飛行邊界保護(hù)提示信息。
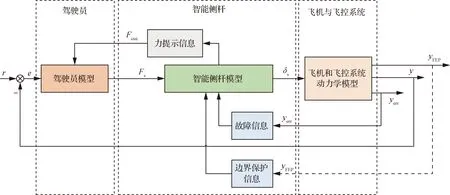
圖2 基于力提示智能側(cè)桿引導(dǎo)的人機(jī)系統(tǒng)結(jié)構(gòu)模型Fig.2 Structural model of pilot-aircraft system based on smart side-stick with force cue
2 智能側(cè)桿的典型力提示方式
對于力提示的智能側(cè)桿,根據(jù)不同力提示方式,主要分為2種類型:智能自適應(yīng)飛行有效提示(Smart Adaptive Flight Effective Cue,SAFE-Cue)側(cè)桿控制器,和基于人感系統(tǒng)調(diào)參的智能側(cè)桿。SAFE-Cue側(cè)桿控制器主要通過附加力提示的形式給駕駛員反饋信息;基于人感系統(tǒng)調(diào)參的智能側(cè)桿主要通過改變?nèi)烁邢到y(tǒng)的剛度,使得駕駛員在操縱側(cè)桿時能夠感受到力的變化。
2.1 SAFE-Cue側(cè)桿控制器
SAFE-Cue側(cè)桿控制器,即SAFE-Cue系統(tǒng),是由美國系統(tǒng)技術(shù)公司(Systems Technology, Inc.)研究與工程服務(wù)副總裁Klyde等提出的[32],其思想是借助附加力的提示給駕駛員飛機(jī)故障/邊界保護(hù)信息,以預(yù)防或減緩故障/靠近安全邊界引起的飛機(jī)失控。SAFE-Cue側(cè)桿控制器包括SAFE-Cue力提示和SAFE-Cue增益調(diào)節(jié)2個部分組成,其結(jié)構(gòu)如圖3所示。其中,SAFE-Cue力提示主要通過附加力的形式給駕駛員觸覺感受,引導(dǎo)駕駛員控制飛機(jī)。當(dāng)飛機(jī)出現(xiàn)故障或臨近飛行安全邊界時,SAFE-Cue側(cè)桿控制器通過智能飛控計(jì)算機(jī)得到故障/邊界保護(hù)信息,并將該故障信息以力的形式作用在人感系統(tǒng)上,通過人感系統(tǒng)反饋給駕駛員。這樣,駕駛員會從操縱桿上感受到這種力提示,得知飛機(jī)系統(tǒng)出現(xiàn)故障或靠近安全邊界,從而進(jìn)行判斷決策,改變操縱策略。
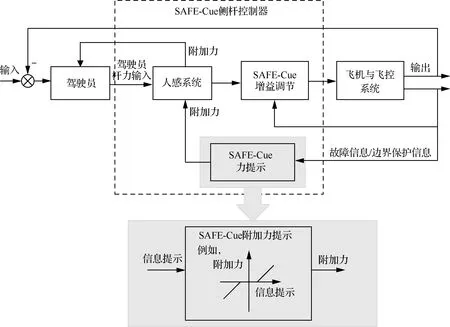
圖3 SAFE-Cue側(cè)桿控制器結(jié)構(gòu)框圖Fig.3 Block diagram of SAFE-Cue side-stick controller
2.2 基于人感系統(tǒng)調(diào)參的智能側(cè)桿
基于人感系統(tǒng)調(diào)參的智能側(cè)桿旨在用于飛機(jī)故障或靠近飛行包線邊界情況下,通過人感系統(tǒng)剛度的變化給駕駛員一種觸覺的感受,以加強(qiáng)駕駛員的“情景意識”,進(jìn)而引導(dǎo)駕駛員進(jìn)行操縱。其結(jié)構(gòu)圖如圖4所示。
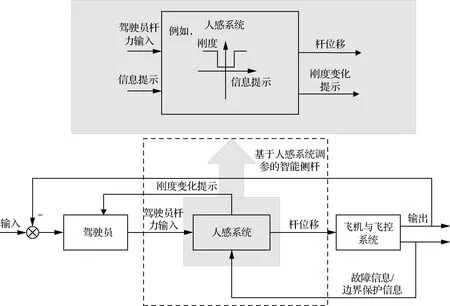
圖4 基于人感系統(tǒng)調(diào)參的智能側(cè)桿結(jié)構(gòu)框圖Fig.4 Block diagram of smart side-stick based on feel system tuning
由于智能側(cè)桿的人感系統(tǒng)特性是變化的,這種變化依賴于飛機(jī)的故障或邊界保護(hù)信息,所以需要通過飛控系統(tǒng)給人感系統(tǒng)的信息提示進(jìn)行調(diào)參。當(dāng)飛機(jī)出現(xiàn)故障或臨近飛行安全邊界時,在側(cè)桿的操縱下,桿力較輕,操縱敏感,容易引起過快的操縱,引發(fā)人機(jī)閉環(huán)失穩(wěn)。這時通過人感系統(tǒng)剛度的變化給駕駛員一種觸覺感示,使較大的桿力情況下得到較小的桿位移,使駕駛員較難操縱駕駛桿,并引導(dǎo)駕駛員改變操縱策略,保證人機(jī)系統(tǒng)的穩(wěn)定性。
上述2種智能側(cè)桿通過不同的力提示方式預(yù)防駕駛員誘發(fā)振蕩引起的人機(jī)系統(tǒng)失控問題。其中,在理論實(shí)現(xiàn)方面,基于人感系統(tǒng)調(diào)參的智能側(cè)桿實(shí)現(xiàn)較為容易,需對彈簧剛度進(jìn)行調(diào)參設(shè)計(jì);而SAFE-Cue側(cè)桿控制器需要對SAFE-Cue力提示和SAFE-Cue增益調(diào)節(jié)兩部分進(jìn)行調(diào)參設(shè)計(jì)。在工程實(shí)現(xiàn)方面,基于人感系統(tǒng)調(diào)參的智能側(cè)桿實(shí)現(xiàn)較為復(fù)雜,需要改變?nèi)烁邢到y(tǒng)內(nèi)部參數(shù);而SAFE-Cue側(cè)桿控制器只需加入了額外的力提示與增益調(diào)節(jié),更適合于工程的可實(shí)現(xiàn)性。
3 智能側(cè)桿的設(shè)計(jì)方法
對于智能操縱桿的設(shè)計(jì)與驗(yàn)證方法,從飛行品質(zhì)的概念要求出發(fā),從完成任務(wù)的難易程度和精確程度2個方面進(jìn)行驗(yàn)證。其中,完成任務(wù)的難易程度通過時變系統(tǒng)的駕駛員誘發(fā)振蕩(Pilot Induced Oscillation,PIO)預(yù)測指標(biāo)進(jìn)行考量,完成任務(wù)的精確程度通過控制誤差特性體現(xiàn),從而進(jìn)行算法設(shè)計(jì),給出智能側(cè)桿的設(shè)計(jì)指標(biāo)和參數(shù)迭代過程。
3.1 智能側(cè)桿設(shè)計(jì)評價(jià)指標(biāo)
3.1.1 時變系統(tǒng)的PIO預(yù)測指標(biāo)
由于智能側(cè)桿引導(dǎo)的人機(jī)動力學(xué)系統(tǒng)具有時變特征,不適合采用傳統(tǒng)基于傅里葉變換的時不變頻譜分析方法,小波分析作為表征時變系統(tǒng)的一種相對較新的方法,可以將其應(yīng)用到時變?nèi)藱C(jī)系統(tǒng)的評價(jià)研究中,從而指導(dǎo)智能側(cè)桿的設(shè)計(jì)。David H. Klyde通過一些特性突變的駕駛員在環(huán)仿真實(shí)驗(yàn),基于小波分析的方法,建立了一個時變系統(tǒng)的PIO預(yù)測準(zhǔn)則[33]。準(zhǔn)則通過桿力峰值頻譜-相位計(jì)算來反映駕駛員主頻處桿力振蕩特性與飛機(jī)響應(yīng)特性之間的關(guān)系[34-35],可以作為智能側(cè)桿設(shè)計(jì)的評價(jià)指標(biāo)。
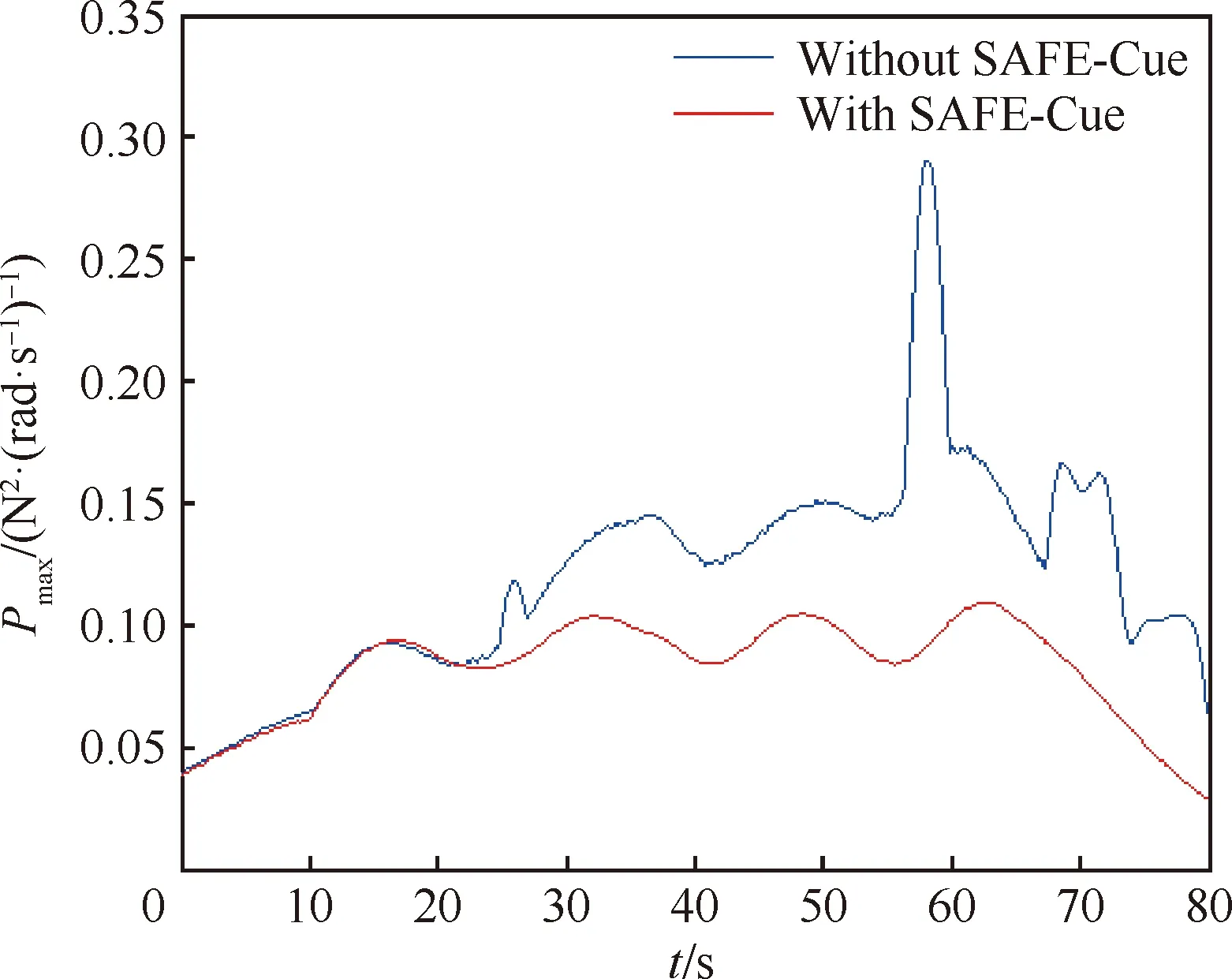
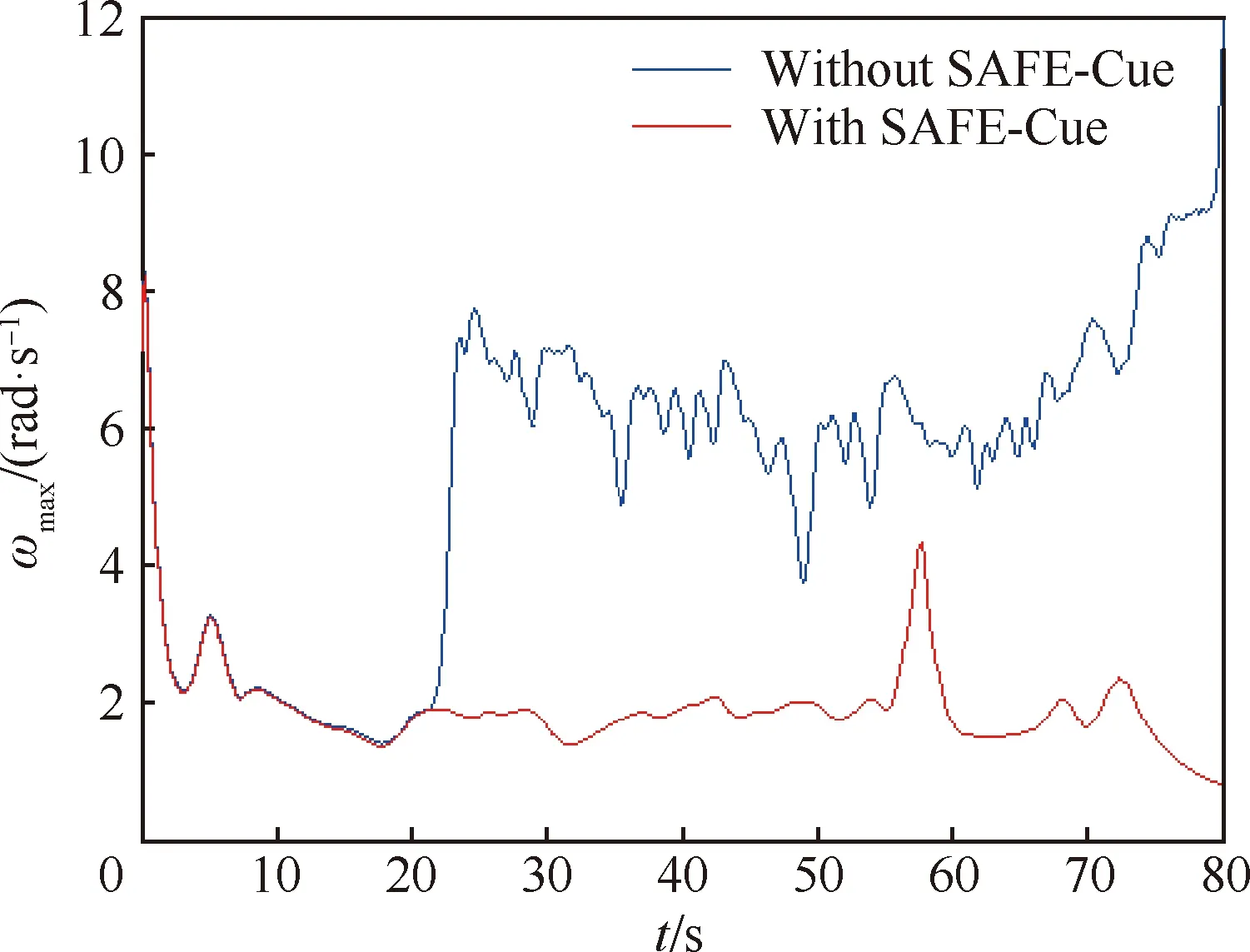
設(shè)飛機(jī)被控對象是YC(ω),桿力輸入信號為F(t),P(ω,t)為桿力F(t)經(jīng)小波變換得到的時變頻譜,它是頻率與時間的函數(shù),在給定t時刻,P(ω,t)為頻率ω的函數(shù),其峰值Pmax(t)就是在t時刻的頻譜峰值,該峰值所對應(yīng)的頻率用ωmax(t)表示,代表駕駛員操縱的主頻,由此可定義為
Pmax(t)=P(ωmax(t),t)
(1)
式中:ωmax(t)為駕駛員操縱的主頻;Pmax(t)為駕駛員在主頻的操縱幅值。
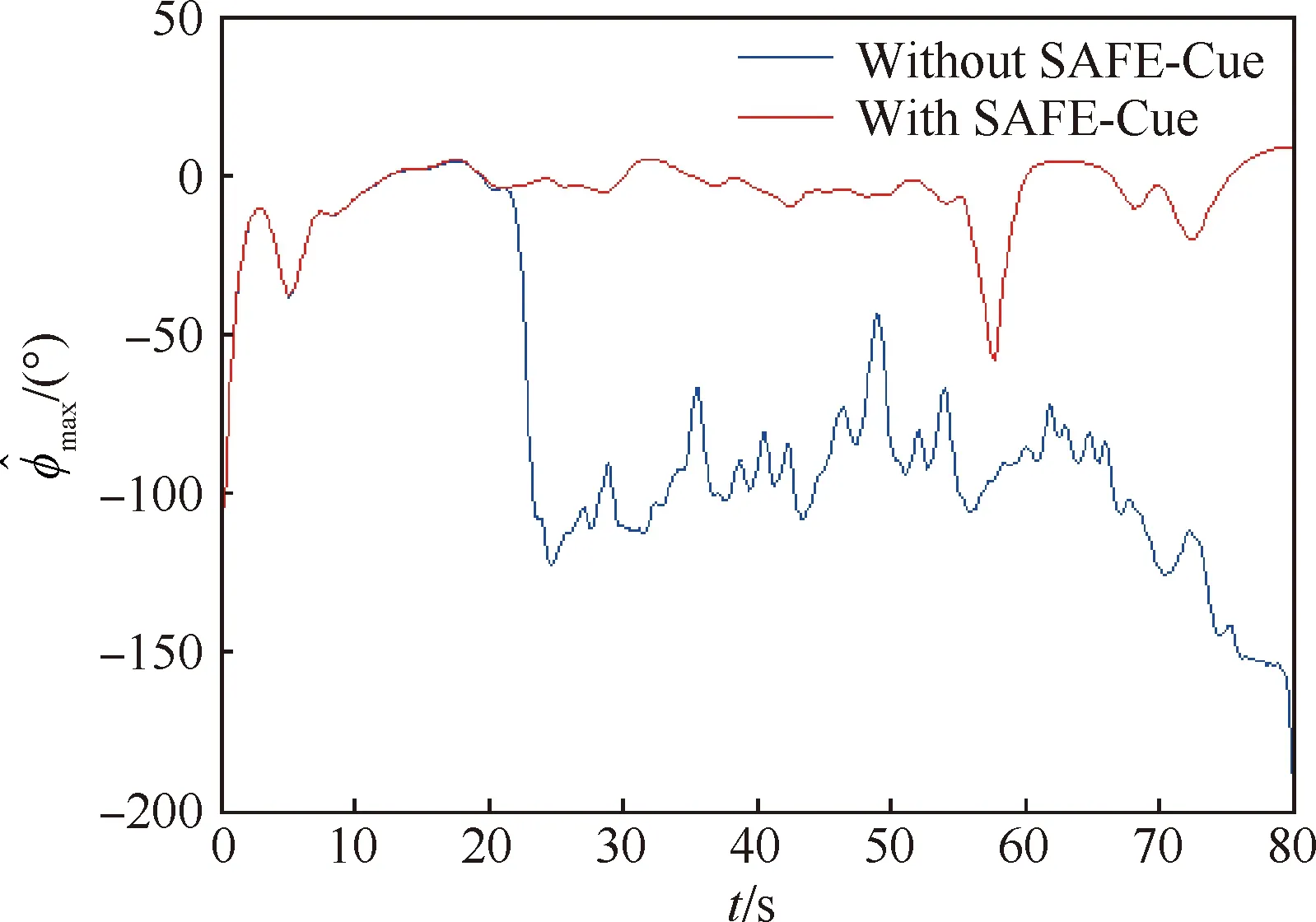
計(jì)算飛機(jī)模型YC(ω)在ω頻率的相位角為φ(ω),如式(2)所示。在駕駛員主頻ωmax(t)處,可以得到飛機(jī)模型YC(ω)在ωmax(t)頻率處對應(yīng)的相位角為φmax(t),表示飛機(jī)對駕駛員操縱響應(yīng)的滯后。
φ(ω)=phase(YC(ω))
(2)
φmax(t)=phase(YC(ωmax(t)))
(3)

(4)
(5)

在圖5所示的準(zhǔn)則中,對縱坐標(biāo)進(jìn)行了標(biāo)準(zhǔn)化處理。由于駕駛員的輸入幅度需要足夠大以及足夠快才可以達(dá)到有效的PIO度量。所以該準(zhǔn)則需要一個標(biāo)準(zhǔn)化和統(tǒng)一化的頻譜峰值,來定義有/無PIO區(qū)域。根據(jù)PIO歷史數(shù)據(jù)可知,±20 lb的桿力值覆蓋了大約80%的PIO事件。因此,在PIO準(zhǔn)則曲線中,用20 lb作為歸一化因子,標(biāo)準(zhǔn)化單位,進(jìn)行時變系統(tǒng)PIO準(zhǔn)則的仿真計(jì)算。
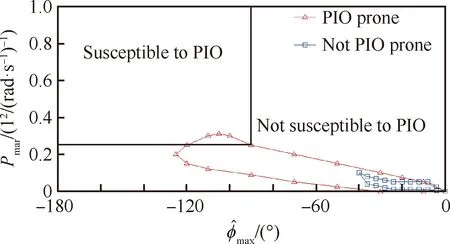
圖5 時變系統(tǒng)的PIO預(yù)測準(zhǔn)則示意圖Fig.5 Schematic diagram of PIO prediction criteria for time varying systems
3.1.2 任務(wù)質(zhì)量指標(biāo)
在圖2所示的人機(jī)系統(tǒng)結(jié)構(gòu)圖中,駕駛員的控制任務(wù)是跟蹤控制。因此,我們可以根據(jù)駕駛員跟蹤的誤差來建立任務(wù)質(zhì)量的評價(jià)指標(biāo)。直觀上,可以理解為:① 誤差越小,任務(wù)質(zhì)量完成的越好;② 當(dāng)故障發(fā)生后,誤差會增加,誤差的變化量可以代表故障引起的任務(wù)代價(jià)損失,所以,可以用相對增量來衡量任務(wù)的代價(jià)損失。基于這兩點(diǎn)考慮,提出以誤差均方根和故障引起的相對增量作為評價(jià)駕駛員完成任務(wù)質(zhì)量的指標(biāo)。
首先,計(jì)算發(fā)生故障前的誤差均方根:
(6)
式中:RMS為均方根值;en為故障發(fā)生前的誤差信號;tf為故障發(fā)生時刻;t1為仿真任務(wù)起始時刻。
計(jì)算故障發(fā)生后的誤差均方根:
(7)
式中:ef為故障發(fā)生后的誤差信號;t2為仿真任務(wù)結(jié)束時刻。
定義誤差指標(biāo)ε為誤差均方根在故障發(fā)生前后的相對變化:
(8)
這里,誤差指標(biāo)ε反映了故障引起的任務(wù)代價(jià),為無因次量。若ε=0,說明故障發(fā)生前后誤差均方根沒有變化,也就是說故障沒有造成任務(wù)質(zhì)量的下降,或者說是沒有發(fā)生故障的情況;若ε>0,說明故障已引起了任務(wù)質(zhì)量的下降。ε越大,表示任務(wù)代價(jià)損失越高,駕駛員完成任務(wù)的質(zhì)量越差。
3.2 智能側(cè)桿設(shè)計(jì)步驟
結(jié)合上述時變系統(tǒng)的PIO預(yù)測指標(biāo)與誤差指標(biāo),進(jìn)行智能側(cè)桿的參數(shù)設(shè)計(jì),可以得到智能側(cè)桿的設(shè)計(jì)算法流程如下,流程圖如圖6所示。
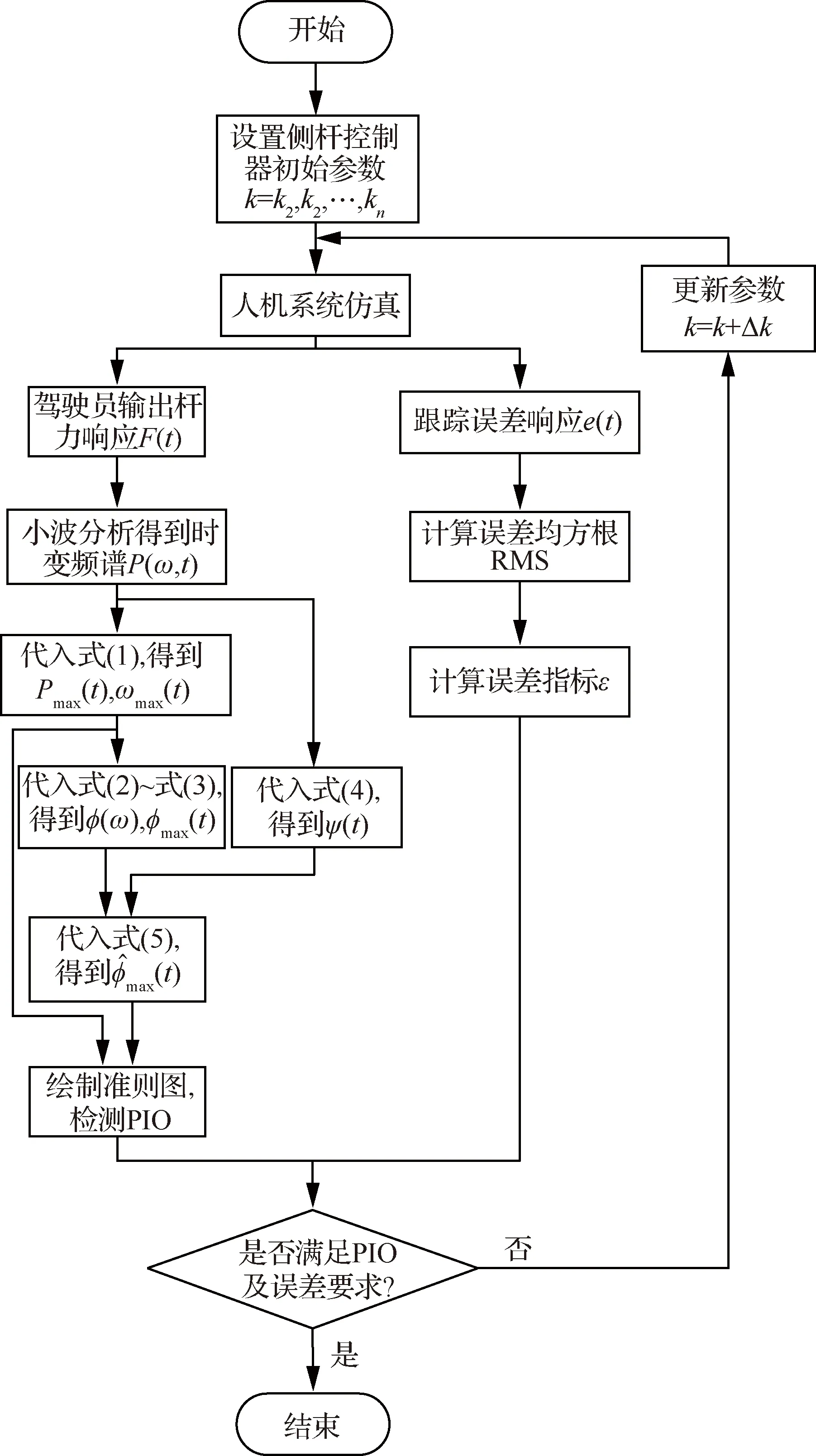
圖6 智能側(cè)桿的設(shè)計(jì)算法流程Fig.6 Algorithm design process of smart side-stick
1) 設(shè)置側(cè)桿控制器的初始參數(shù)k=k1,k2,…,kn,n為參數(shù)個數(shù)。
2) 將側(cè)桿控制器參數(shù)代入到人機(jī)系統(tǒng)模型中,進(jìn)行人機(jī)閉環(huán)系統(tǒng)仿真,記錄動態(tài)響應(yīng):桿力F(t),誤差e(t),舵指令δc(t),舵響應(yīng)δ(t)。
3) 利用CMOR小波對步驟2)中桿力信號F(t)進(jìn)行時頻分析,得到時變頻譜P(ω,t)。
4) 將步驟3)中時變頻譜P(ω,t)代入式(1),得到駕駛員主頻ωmax(t)和頻譜峰值Pmax(t)。
5) 將頻率ω代入式(2)計(jì)算飛機(jī)相位角φ(ω)。將步驟4)中駕駛員主頻ωmax(t)代入式(3), 計(jì)算得到ωmax(t)頻率處對應(yīng)的相位角φmax(t)。
8) 利用步驟2)得到的誤差響應(yīng)e(t)計(jì)算故障發(fā)生前后的誤差均方根,并計(jì)算誤差指標(biāo)ε,檢測是否滿足誤差要求。
9) 若檢測結(jié)果不滿足PIO及誤差要求,步驟1)中k=k+Δk,返回至步驟2)進(jìn)行繼續(xù)計(jì)算;若檢測結(jié)果滿足要求,則停止迭代。
4 力提示智能側(cè)桿引導(dǎo)的人機(jī)系統(tǒng)數(shù)學(xué)模型
對圖2所示的基于力提示智能側(cè)桿引導(dǎo)的人機(jī)系統(tǒng),需要建立相應(yīng)的飛機(jī)動力學(xué)、駕駛員控制、智能側(cè)桿的人感系統(tǒng)及其力提示控制器模型,考慮到故障或安全邊界下飛行,可能出現(xiàn)控制面速率飽和,應(yīng)包括舵機(jī)和速率限制模型。對于力提示的不同功能和形式,智能桿的控制器模型是不同,相應(yīng)的駕駛員模型也會不同。為了說明力提示側(cè)桿控制器設(shè)計(jì)具體方法,以SAFE-Cue側(cè)桿控制器為例,建立帶SAFE-Cue側(cè)桿控制器的人機(jī)系統(tǒng)數(shù)學(xué)模型,如圖7所示。

圖7 帶SAFE-Cue側(cè)桿控制器的人機(jī)系統(tǒng)Fig.7 Pilot-aircraft system with SAFE-Cue side-stick controller
對于飛機(jī)控制面故障引起的控制面速率飽和問題,飛機(jī)的實(shí)際輸出響應(yīng)與沒有發(fā)生故障的理想情況下的輸出響應(yīng)會出現(xiàn)一個偏差,SAFE-Cue側(cè)桿控制器將這種偏差作為故障的提示信息。對于飛機(jī)縱向操縱,俯仰角速率q作為飛機(jī)的輸出響應(yīng)信號,這里偏差定義為實(shí)際故障下飛機(jī)系統(tǒng)的俯仰角速率響應(yīng)與沒有發(fā)生故障的理想情況下的俯仰角速率響應(yīng)的差值,即qerr。SAFE-Cue力提示將這個偏差以力的形式反饋給駕駛員,SAFE-Cue增益調(diào)節(jié)基于該偏差降低增益值,從而減小飛機(jī)控制面輸入指令。圖中:θc為俯仰角指令信號,e為誤差信號,θ為飛機(jī)的俯仰角輸出,F(xiàn)為桿力,F(xiàn)cue為SAFE-Cue側(cè)桿控制器給駕駛員的提示力,δc為人感系統(tǒng)輸出,δ′c為SAFE-Cue增益調(diào)節(jié)的輸出,作用于飛機(jī)與飛行控制系統(tǒng),qNom為理想系統(tǒng)的俯仰角速率輸出,q為飛機(jī)俯仰角速率輸出,qerr為實(shí)際控制系統(tǒng)響應(yīng)與理想系統(tǒng)響應(yīng)之間測得的誤差。
4.1 駕駛員模型

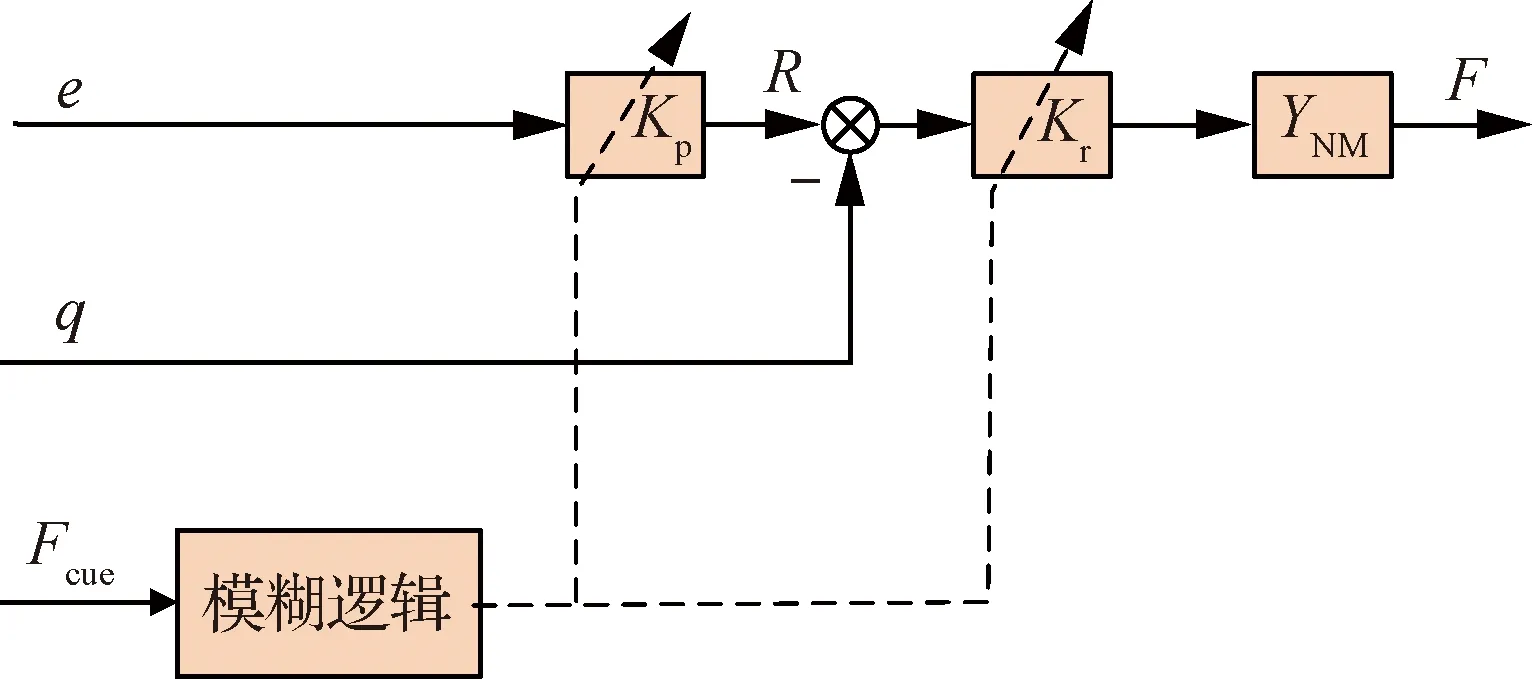
圖8 駕駛員模型Fig.8 Human pilot model
(9)
對于駕駛員參數(shù)調(diào)參,首先定義邏輯信號變量x為
x=Fcue
(10)
這里,信號變量x與SAFE-Cue提示力Fcue有關(guān)。Fcue體現(xiàn)了SAFE-Cue側(cè)桿控制器的關(guān)鍵功能,能夠及時向駕駛員提示系統(tǒng)出現(xiàn)故障的情況。
將信號變量x進(jìn)行標(biāo)準(zhǔn)化處理得到變量z:
z=|x|/RMS(|x|)
(11)
用z的值作為駕駛員感受到提示并做出判斷的依據(jù)。但在實(shí)際情況下,由于人的生理性因素,駕駛員對故障提示很難精準(zhǔn)識別,并立即進(jìn)行決策。因此,駕駛員對于故障觸發(fā)的瞬間判斷具有一定的模糊性。因此,我們把駕駛員觸發(fā)策略變化的過程利用模糊邏輯理論進(jìn)行處理,將駕駛員感受值z作為模糊輸入,輸出為觸發(fā)因子ktrigger。表2為模糊設(shè)置。
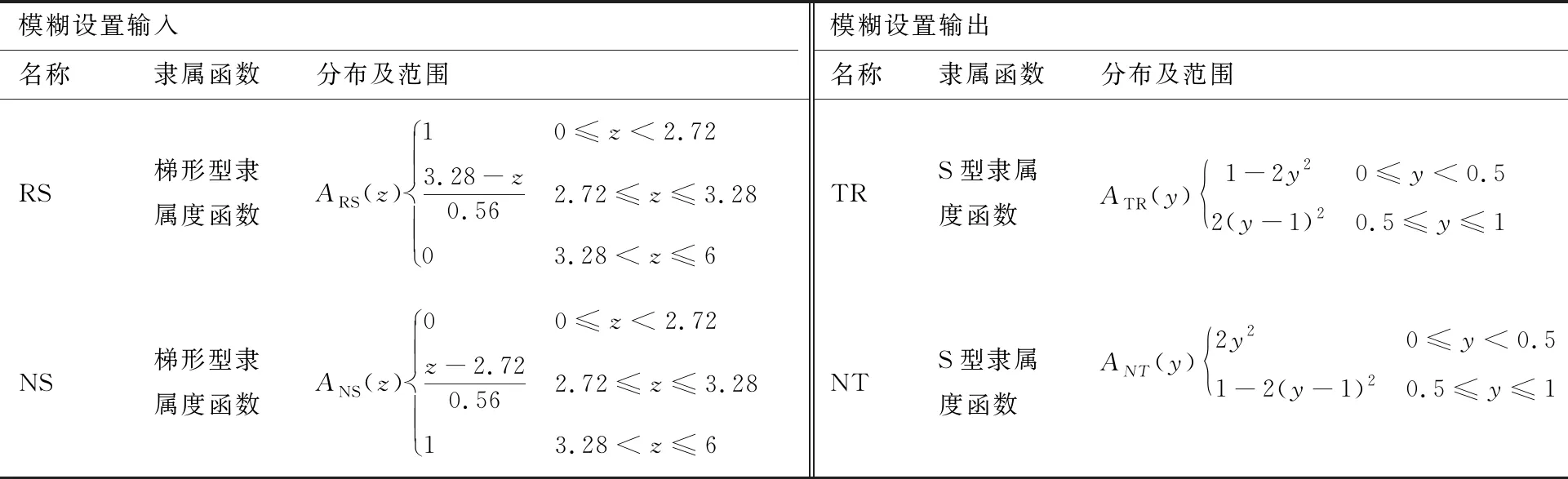
表2 模糊設(shè)置
模糊集合“RS”和“NS”定義了z的相對小的值和相對大的值。此外,“TR”和“NT” 代表觸發(fā)因子ktrigger的大小。所采用的模糊規(guī)則集在IF-THEN形式為
1) 如果x是RS,那么y是TR。
2) 如果x是NS,那么y是NT。
選擇模糊集輸入范圍[2.72,3.28]的中心值3,因?yàn)樗砹恕?σ”的概念,它表示人類對事物的判斷符合正態(tài)分布,文獻(xiàn)[29]證明了這一點(diǎn)。可變范圍[2.72,3.28]基于駕駛員的感知誤差特征得到[36]。由此,Kr和Kp的變化量ΔKr和ΔKp的參數(shù)設(shè)置為
ΔKr=x×ktrigger
(12)
(13)
4.2 飛機(jī)與飛控系統(tǒng)動力學(xué)模型
飛機(jī)構(gòu)型采用基于飛行試驗(yàn)的PIO評估構(gòu)型[33],其傳遞函數(shù)形式為


(14)
舵機(jī)系統(tǒng)的參數(shù)選擇如表3所示。
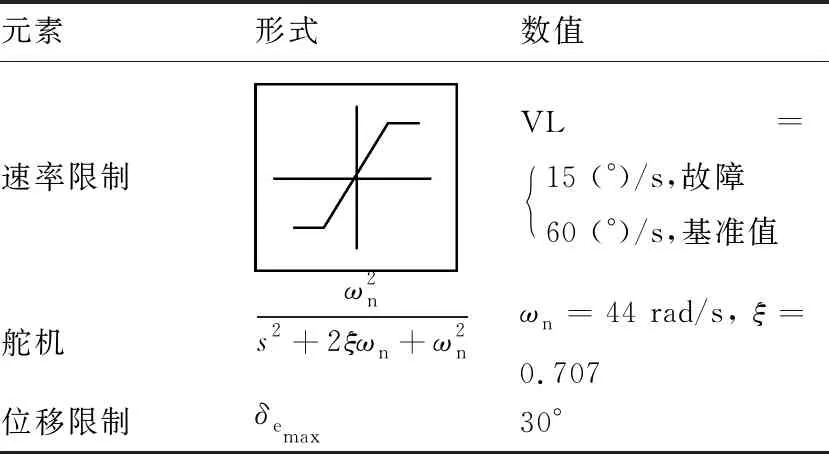
表3 飛機(jī)舵機(jī)系統(tǒng)參數(shù)
4.3 SAFE-Cue側(cè)桿控制器模型
SAFE-Cue側(cè)桿控制器模型包括人感系統(tǒng)模型、SAFE-Cue力提示與增益調(diào)節(jié)模型以及理想系統(tǒng)模型。
1) 人感系統(tǒng)
對于智能側(cè)桿的人感系統(tǒng),其特性結(jié)構(gòu)初始參數(shù)如表4所示。
2) SAFE-Cue力提示與增益調(diào)節(jié)
SAFE-Cue力提示參數(shù)設(shè)置為
(15)
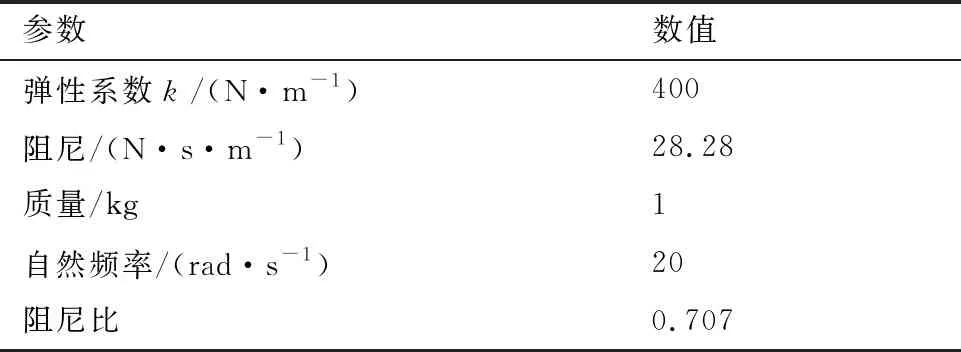
表4 人感系統(tǒng)特性
式中:Fcue為SAFE-Cue力提示的大小;kF為SAFE-Cue力提示的變量參數(shù),kF≥0。
SAFE-Cue增益調(diào)節(jié)參數(shù)設(shè)置為
Gcue=
(16)
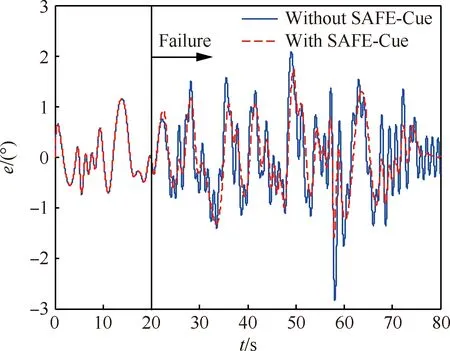
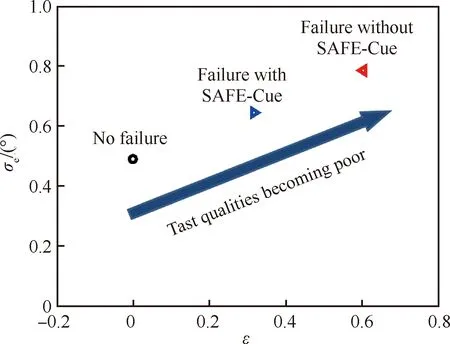
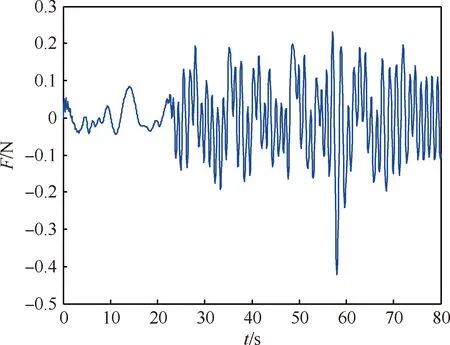
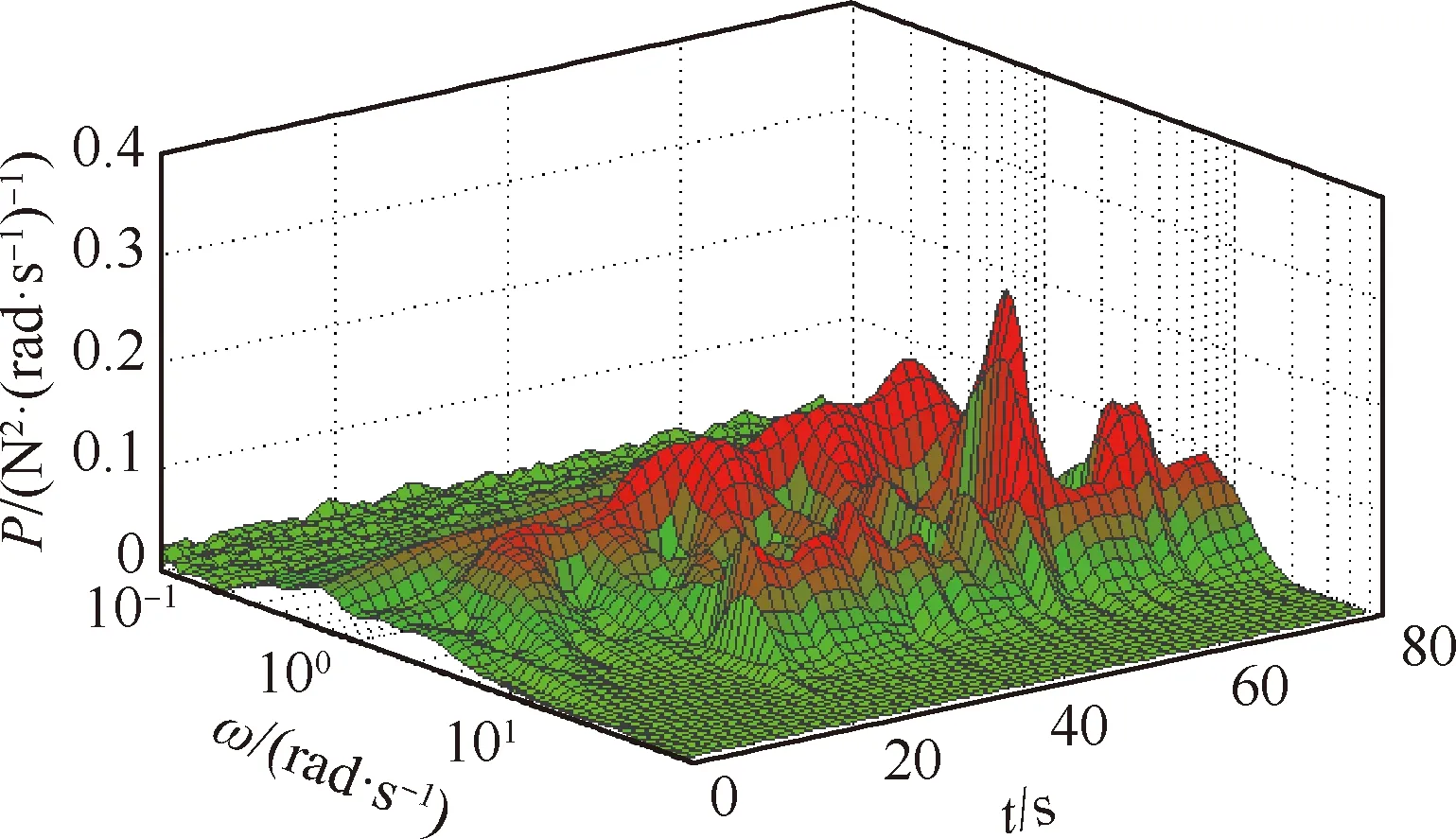
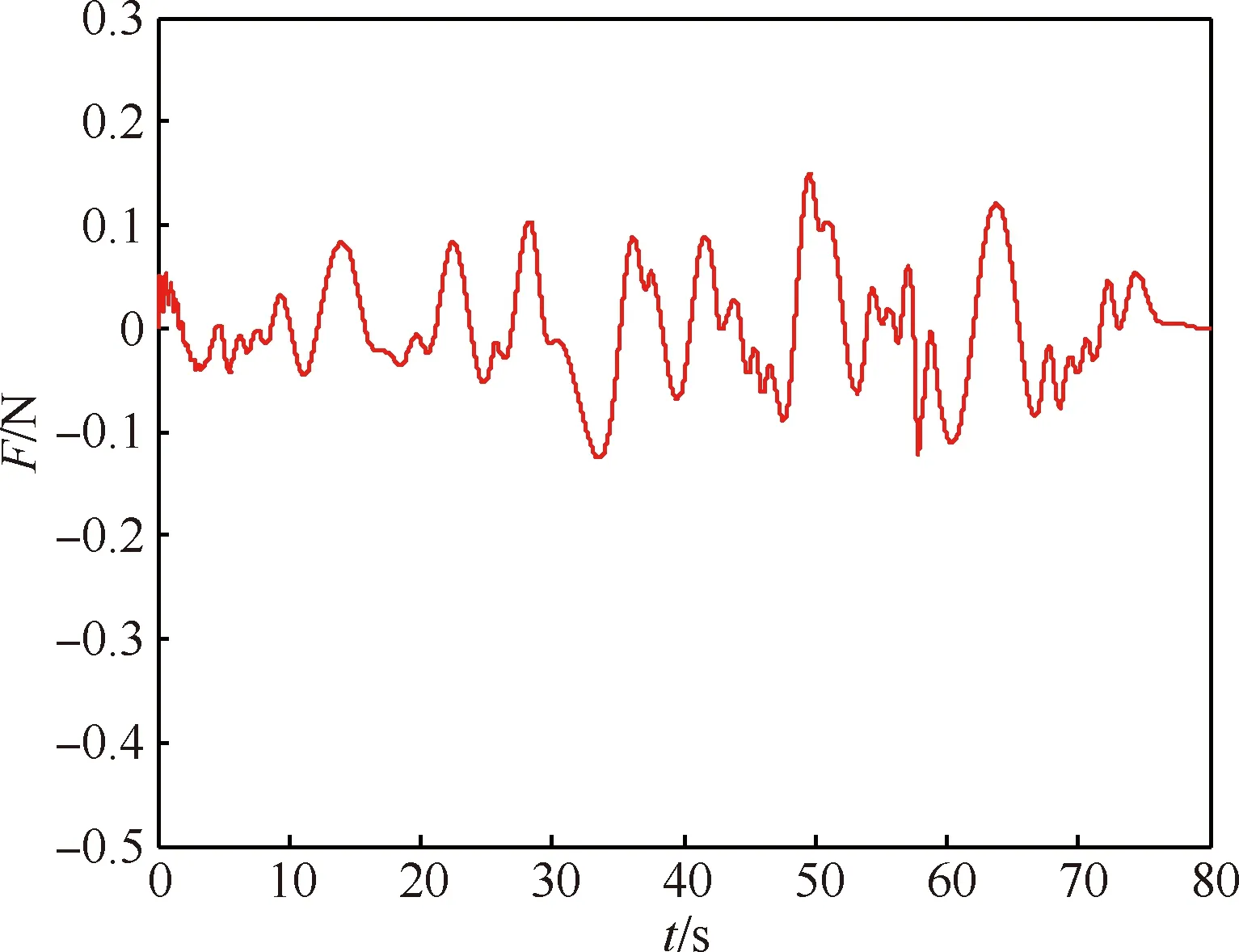
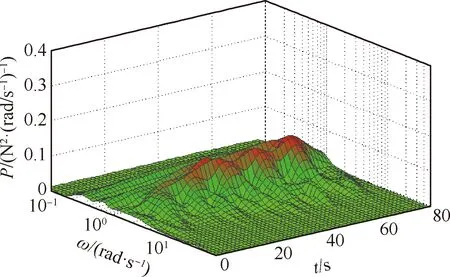
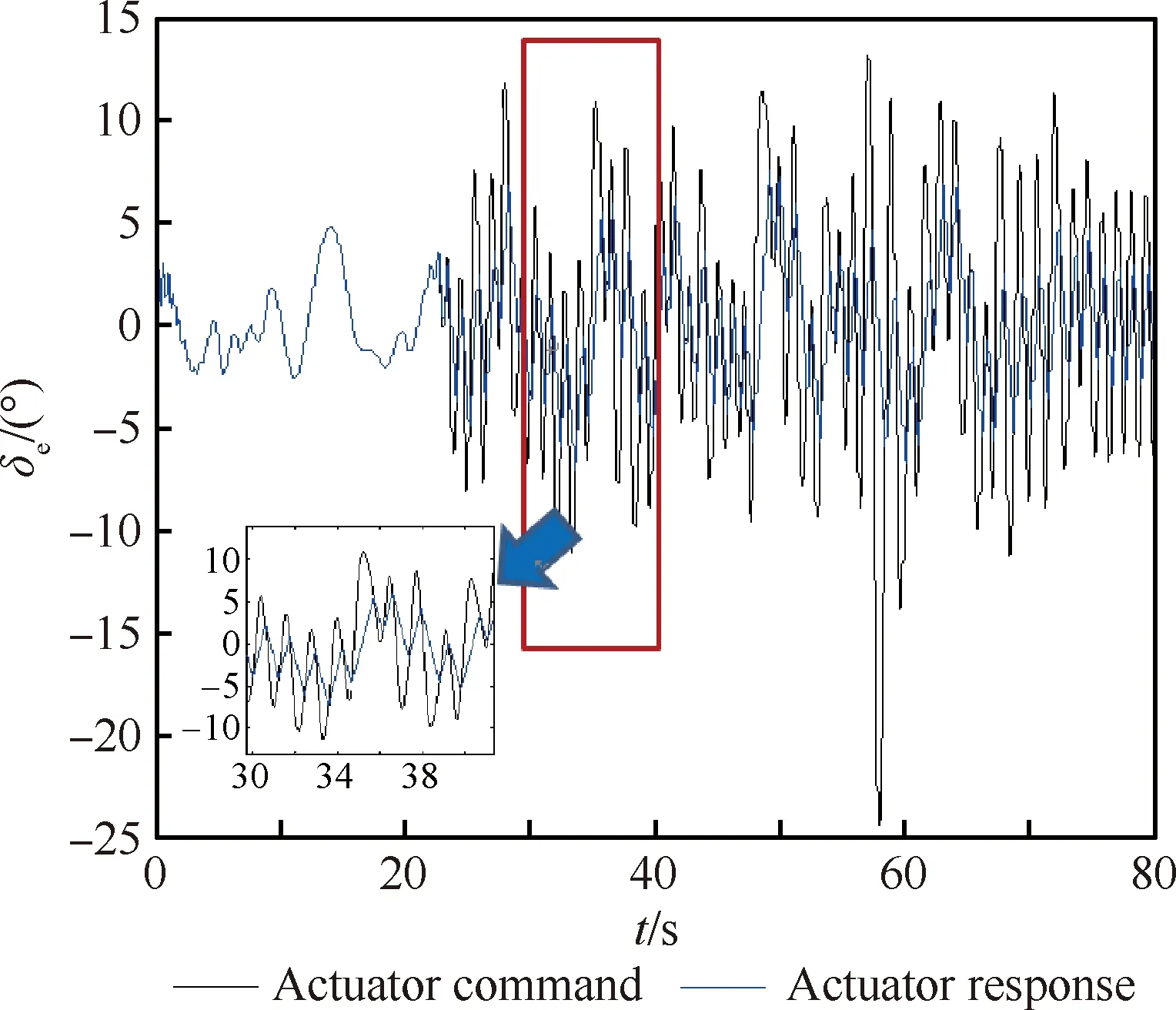
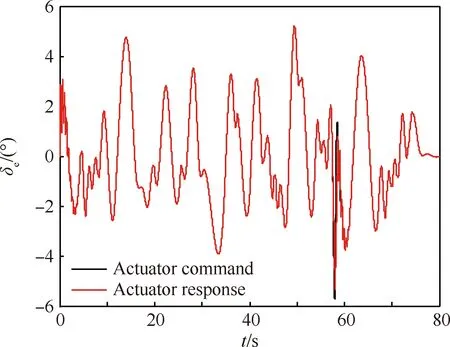
式中:Gcue為SAFE-Cue增益調(diào)節(jié)的大小;kG為SAFE-Cue為增益調(diào)節(jié)的變量參數(shù),0 圖9為SAFE-Cue側(cè)桿控制器設(shè)計(jì)中力提示參數(shù)kF=1,增益調(diào)節(jié)參數(shù)kG=0.5的參數(shù)設(shè)計(jì)示例圖。 圖9 SAFE-Cue側(cè)桿控制器設(shè)計(jì)參數(shù)示例Fig.9 Examples of design parameters of SAFE-Cue side-stick controller 另外,理想系統(tǒng)模型選擇飛機(jī)未發(fā)生故障時的飛機(jī)系統(tǒng)模型。 為了檢驗(yàn)智能側(cè)桿控制器設(shè)計(jì)方法的可行性與有效性,對仿真任務(wù)和故障進(jìn)行設(shè)置,計(jì)算智能側(cè)桿控制器設(shè)計(jì)流程和算法步驟的詳細(xì)仿真結(jié)果,并對設(shè)計(jì)結(jié)果進(jìn)行分析和機(jī)理解釋。 仿真任務(wù)選擇俯仰姿態(tài)縱向正弦信號疊加Sum-of-Sines(SOS)跟蹤任務(wù),任務(wù)時長設(shè)定為80 s,在20 s時出現(xiàn)故障,主要的故障情況是控制面效率降低而引起的速率飽和情況。給定的故障方案是控制面效率下降25%(即控制面的效率為原來的75%),速率限制15(°)/s。 圖10 跟蹤誤差結(jié)果Fig.10 Results of tracking errors 圖11 任務(wù)質(zhì)量指標(biāo)Fig.11 Task quality index 圖12 無SAFE-Cue的桿力響應(yīng)Fig.12 Stick force response without SAFE-Cue 圖13 無SAFE-Cue的小波分析結(jié)果Fig.13 Results of wavelet analysis without SAFE-Cue 圖14 帶SAFE-Cue的桿力響應(yīng)Fig.14 Stick force response with SAFE-Cue 圖15 帶SAFE-Cue的小波分析結(jié)果Fig.15 Results of wavelet analysis with SAFE-Cue 圖16 駕駛員頻譜峰值Pmax(t)Fig.16 Spectrum peak Pmax(t) of human pilot 圖17 駕駛員操縱主頻ωmax(t)Fig.17 Main frequency ωmax(t) of human pilot 圖18 主頻處飛機(jī)響應(yīng)相位延遲Fig.18 Aircraft response phase delay at main frequency 圖19 時變?nèi)藱C(jī)系統(tǒng)評價(jià)結(jié)果Fig.19 Evaluations of time-varying pilot-aircraft system 跟蹤誤差結(jié)果顯示,20 s后故障發(fā)生,故障后帶SAFE-Cue側(cè)桿控制器的跟蹤誤差范圍和波動情況與故障前變化較小,而沒有SAFE-Cue側(cè)桿控制器的跟蹤誤差明顯比故障前波動范圍大。由于系統(tǒng)存在一定的時間延遲,故障情況通過跟蹤誤差結(jié)果的顯現(xiàn)不會立即表現(xiàn)出來。任務(wù)質(zhì)量指標(biāo)顯示,無SAFE-Cue側(cè)桿控制器時,任務(wù)質(zhì)量指標(biāo)ε為0.602 0,而加入SAFE-Cue側(cè)桿控制器后,任務(wù)質(zhì)量指標(biāo)ε降為0.344 3,說明SAFE-Cue側(cè)桿控制器能夠提高駕駛員的控制精度。 桿力響應(yīng)的結(jié)果顯示,無SAFE-Cue側(cè)桿控制器故障后駕駛員的桿力響應(yīng)波動明顯,駕駛員的工作負(fù)荷較大;加入SAFE-Cue側(cè)桿控制器后,減緩了桿力響應(yīng)的波動頻率,減輕了駕駛員的工作負(fù)荷。小波分析的結(jié)果可以看出無SAFE-Cue側(cè)桿控制器的桿力峰值頻譜相比于帶SAFE-Cue側(cè)桿控制器的桿力峰值頻譜有所增大。 為了解釋SAFE-Cue側(cè)桿控制器減緩人機(jī)系統(tǒng)振蕩的機(jī)理,輸出了有/無SAFE-Cue側(cè)桿控制器的舵指令和舵響應(yīng)結(jié)果如圖20和圖21所示。可以看到,在沒有SAFE-Cue側(cè)桿控制器的情況下,舵面響應(yīng)出現(xiàn)了嚴(yán)重的三角波,產(chǎn)生了速率飽和,而帶有SAFE-Cue側(cè)桿控制器的情況下,在58 s 左右出現(xiàn)了速率飽和,其他情況良好,基本抑制了速率飽和,改善了人機(jī)不良耦合的問題。 圖20 無SAFE-Cue的舵指令和舵響應(yīng)Fig.20 Actuator command and response without SAFE-Cue 圖21 帶SAFE-Cue的舵指令和舵響應(yīng)Fig.21 Actuator command and response with SAFE-Cue 1) 針對帶力提示的智能側(cè)桿引導(dǎo)的人機(jī)交互特點(diǎn),建立了時變?nèi)藱C(jī)動力學(xué)系統(tǒng)模型。其中,智能側(cè)桿模型給出了典型的力提示方式,將飛機(jī)故障/邊界保護(hù)信息反饋給駕駛員,引導(dǎo)駕駛員改變操縱策略;時變駕駛員模型考慮到智能側(cè)桿的力提示特性,通過力提示信號進(jìn)行模糊邏輯調(diào)參。所建立的人機(jī)系統(tǒng)模型可用于故障、邊界保護(hù)多種功能提示的人機(jī)系統(tǒng)的仿真。 2) 考慮到智能側(cè)桿引導(dǎo)的人機(jī)系統(tǒng)的時變特性,利用基于小波分析的時變?nèi)藱C(jī)系統(tǒng)評價(jià)準(zhǔn)則,并建立任務(wù)質(zhì)量指標(biāo),作為側(cè)桿控制器設(shè)計(jì)的綜合指標(biāo),結(jié)合基于模型的人機(jī)系統(tǒng)仿真模型,建立了基于模型的力提示側(cè)桿控制器設(shè)計(jì)方法。該設(shè)計(jì)方法適用于不同功能和提示方式的智能側(cè)桿參數(shù)的設(shè)計(jì)。 3) 以SAFE-Cue側(cè)桿控制器為例,進(jìn)行人機(jī)系統(tǒng)閉環(huán)仿真,結(jié)果表明,相比于未加入SAFE-Cue側(cè)桿控制器的控制結(jié)果,帶SAFE-Cue側(cè)桿控制器的跟蹤誤差更小,說明智能側(cè)桿控制器能夠提高駕駛員的控制精度;同時帶SAFE-Cue側(cè)桿控制器的桿力峰值頻譜、主頻以及主頻處飛機(jī)響應(yīng)相位延遲更小,說明智能側(cè)桿控制器能夠降低駕駛員的工作負(fù)擔(dān), 減緩人機(jī)系統(tǒng)振蕩。時變?nèi)藱C(jī)系統(tǒng)評價(jià)結(jié)果表明,無SAFE-Cue側(cè)桿控制器的結(jié)果易于發(fā)生PIO,而帶SAFE-Cue側(cè)桿控制器的結(jié)果沒有發(fā)生潛在PIO的傾向,說明SAFE-Cue側(cè)桿控制器能起到減緩人機(jī)不良耦合、提高飛機(jī)飛行安全的作用,也表明了所提出的力提示側(cè)桿控制器的設(shè)計(jì)方法的有效性。
5 仿真結(jié)果
5.1 仿真任務(wù)與故障設(shè)置
5.2 仿真結(jié)果與分析


6 結(jié) 論
猜你喜歡
汽車實(shí)用技術(shù)(2022年14期)2022-07-30 06:13:42
環(huán)球時報(bào)(2022-05-30)2022-05-30 15:16:57
汽車實(shí)用技術(shù)(2022年4期)2022-03-07 06:07:20
當(dāng)代陜西(2019年11期)2019-06-24 03:40:28
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
作文周刊·小學(xué)一年級版(2017年9期)2017-06-20 00:19:33
小學(xué)生導(dǎo)刊(低年級)(2016年8期)2016-09-24 22:09:04