基于雷達波相位干涉技術的桿塔結構形變監測研究
2021-10-23 07:10:22胡小紅
中國測試 2021年9期
葉 青,程 智,胡小紅,陳 俊,孫 雄
(國網浙江省電力有限衢州供電公司,浙江 衢州 324000)
0 引 言
目前特高壓輸電線路通常存在跨地區、跨流域特性,輸電線路所處區域地形復雜,存在眾多采空區,山體等地形隨時間移動,可能造成輸電線路桿塔沉降、位移以及傾斜問題,桿塔變形嚴重將造成倒伏現象[1]。近年來自然災害頻發[2],輸電線路桿塔變形以及倒塌影響電力系統正常運行。實時監測輸電線路桿塔形變,明確桿塔的運行狀態,提升電力系統運行安全,具有極高的重要性,這引起了相關學者的關注和研究。
Qusen C 等[3]分析影響懸索橋塔架垂直變形的構件,設計了一種高精度全球導航衛星系統(global navigation satellite system,GNSS)數據處理策略,以便于變形提取和分析;Keliang D 等[4]利用地基微波干擾雷達對木塔結構的動態變形進行了檢測,采用Hilbert-Huang 變換(HHT)對監測數據進行模態參數識別。文獻[5]通過在某些節點上安裝射頻識別(radio frequency identification,RFID)標簽,發射不同頻率的超高頻信號的方式,確定鐵塔的形變位置和大小;文獻[6]提出一種基于載波相位差分的動靜態自適應融合算法,相比靜態定位則縮減了觀測周期,提高了微小形變跟蹤性能。同時,雷達波相位干涉技術是目前廣泛應用于測量領域的測量技術。干涉紋圖受大氣波動以及相干性影響容易造成相位誤差,通過多基線差分干涉紋圖組合回歸分析相位,可獲取目標形變結果。
基于此,本文利用雷達波相位干涉技術的優勢,研究基于雷達波相位干涉技術的桿塔結構形變監測,有效實現桿塔結構實時監測,其監測效率高、測量精確、成本低。所研究方法具有較高的形變信號時間采樣率,提取符合線性形變的相干目標,通過空間域相位解纏方法提升相位解纏穩定性,可應用于重點交叉跨越線路、重點區域的桿塔結構監測中。
1 雷達波相位干涉技術的桿塔結構形變監測
1.1 雷達波相位干涉技術
將不同時間雷達反射信號的相位差與目標位移變化精準測量的技術即干涉測量技術,通過干涉測量技術獲取桿塔形變量。干涉測量技術中的干涉測量示意圖如圖1 所示。
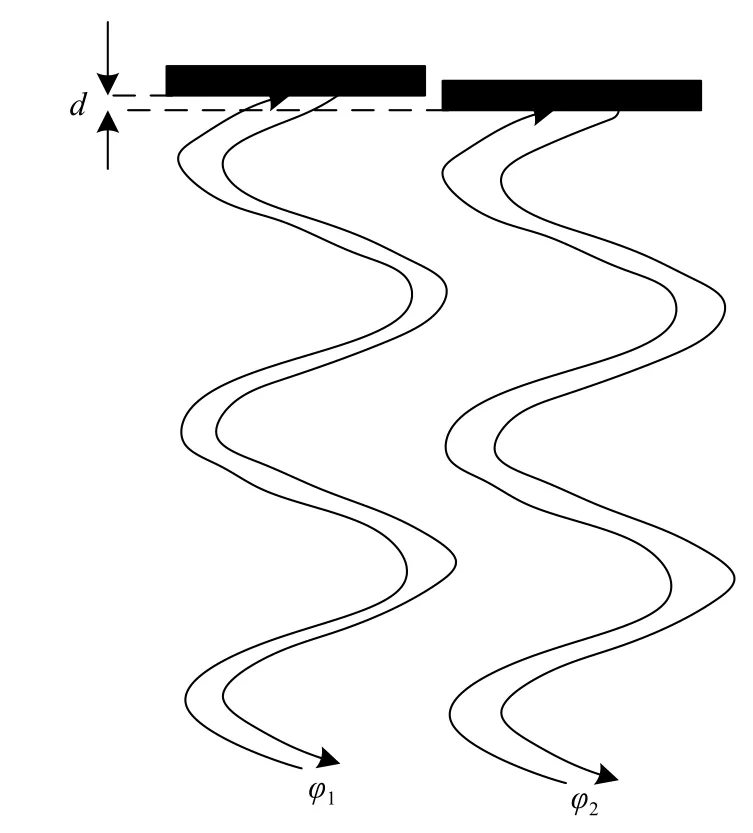
圖1 干涉測量示意圖
用 φ1與 φ2分別表示雷達所接收的桿塔第一次發射信號以及第二次發射信號的回波相位,可得φ2?φ1為兩次回波信號間相位差。依據波長與相位對應關系明確不同桿塔的位移變化情況,可得待測量桿塔的位移變化公式如下:

其中λ 表示發射信號的波長。
1.2 相干目標識別
監測桿塔結構形變時,首先需識別相干桿塔目標,通過桿塔強度的穩定性、空間相干性以及點目標監測實現相關目標像元識別。
1.2.1 相干系數均值
對窗口實施統計運算,窗口統計結果受獨立散射體鄰域像元值影響。基于空間域窗口計算相干系數,相干系數受窗口大小影響較大,可能誤檢測低相干目標,令解纏相位圖空間分辨率有所降低。在時間序列中,桿塔的相干系數平均值公式如下:
式中:N——干涉紋圖數;
γi——第i個相干系數的值。
符合公式(2)條件的桿塔即相干目標候選點,將與干涉模型不匹配桿塔通過后續處理剔除。形變圖的最終分辨率由相干系數窗口空間大小決定,設置窗口大小的距離向與方位向分別為5×25。該窗口適用于形變圖的相干性估計與保持形變的最終空間分辨率。
1.2.2 點目標檢測
由眾多散射體組成雷達分辨單元,點目標為主導該分辨單元的后向散射強度的散射體。雷達分辨單元尺寸遠高于點目標幾何尺寸,點目標相位特征極為穩定,可作為相干目標。點目標存在后向散射特性,所獲取原始信號不同子視圖中存在較為相似的散射特征。反向變換單復視SLC 圖像獲取眾多子視圖,譜相關分析子視圖獲取相關性識別點目標[7]。點目標識別算法不受雷達目標散射強度影響,具有較高的空間域相干目標可靠性,可有效抑制雜波以及斑點噪聲擴展目標,識別點目標。
1.2.3 構建不規則三角網
依據Delaunay 三角剖分方法令全部相鄰像元相關,獲取不存在重疊的三角網[8],通過所獲取三角網間關聯性實現相位迭代處理。
1.3 多基線干涉相位模型
1.3.1 干涉相位模型
相鄰桿塔間相位變化量在選取兩景SAR 影像生成干涉紋圖時公式如下:

式中:? φflat——與斜距相關的平地相位;
?φtopo——與斜距相關的地形相位;
?φmov——兩次獲取SAR 圖像時地表在視線相移動造成的相位變化;
?φatm——兩次獲取SAR 圖像時大氣波動造成的相位變化;
?φnoise——噪聲相位。
式(3)中,存在如下關系:

式中:λ——雷達波長;
r——斜距;
b——垂直基線長;
?r——像元間斜距增量;
?h——高程增量。
去除地形相位獲取差分干涉相位公式如下:

DEM 存在高程誤差,考慮高程誤差情況下相位公式如下:

其中 ?ε表示高程誤差,θ 表示傾斜角。
設雷達視線相形變量包含線性形變以及非線性形變兩部分[9],獲取公式如下:

式中:T——兩次獲取SAR 影像的時間基線;
?v——線性形變速率。
設殘余相位包含大氣波動、非線性形變相位以及噪聲相位,可得公式如下:
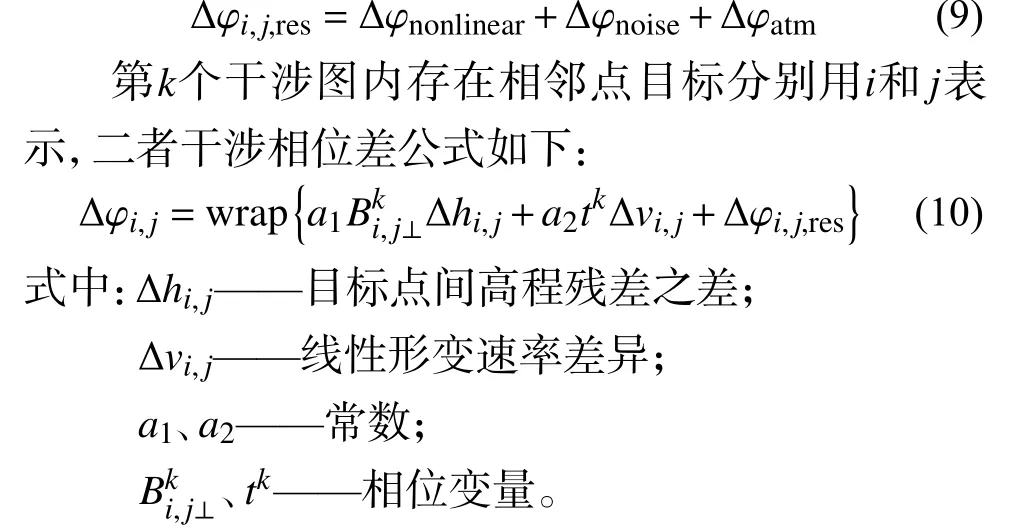
1.3.2 空間搜索的干涉點相位模型解算
選取桿塔相鄰點目標作為研究對象,各干涉圖均存在式(10)的干涉差分相位方程,方程中存在未知數 ?hi,j、?vi,j、?φi,j,res,過多未知數導致觀測方程無法直接求解[10],利用所研究時間序列所包含數量為K的干涉圖獲取干涉圖復相干系數公式如下:

設置線性形變差異最大、最小值以及相鄰點目標高程殘差之差,依據固定補償搜索于 ?hi,j–?vi,j的二維空間中,逐點獲取 ?φi,j,res,?hi,j、?vi,j,獲取時為線性形變速率差異以及高程殘差之差最優解,實現相位纏繞問題求解。噪聲相位之差是造成臨近點干涉相位差的主要原因[11-12],應屬于較小固定區間內變動,相應為最大值,相位模型與觀測值契合度在此時的?hi,j、?vi,j值時為最佳。
1.3.3 非線性形變相位與大氣延遲相位分離
利用點目標干涉相位差分獲取高程殘差以及線性形變速率修正量后,分析解纏所獲取點目標殘余相位,通過分離處理獲取非線性形變相位,實現形變的完整信息。

各干涉相位均針對主影像而來,主影像大氣延遲相位被留在眾多干涉圖內,需將由于大氣延遲所造成相位去除,獲取大氣狀況相位貢獻。用表示時間序列上點目標殘余相位平均值,將其視為各點針對主影像所獲取的大氣延遲相位,可得公式如下:



疊加各點上非線性形變速率以及線性形變速率,獲取時間序列上針對主影像不同點的實際形變速率,最終獲取不同時間段桿塔結構的雷達視線方向總形變。
2 實例分析
為檢測所研究基于雷達波相位干涉技術的桿塔結構形變監測方法監測桿塔結構形變的有效性,選取某電力企業的單筒塔、三筒塔、角鋼塔作為實驗對象。利用前端監測裝置采集輸電桿塔相關數據,通過WIFI 通信方式傳送至PC 端,PC 端采用本文方法處理所采集數據,獲取最終的桿塔形變監測結果。測量結構示意圖如圖2 所示。

圖2 測量結構示意圖
所設置前端監測裝置安裝過程中需符合國家電網輸電線路裝態監測系統技術規范,遵循IEC 61968《電力企業應用集成》和GB 50395—2007《視頻安防監控系統工程設計規范》等相關標準和規范。
2.1 基線誤差統計
雷達波相位干涉技術中基線誤差是干涉處理的重要來源,選取桿塔結構中目標區域形變速率較小的點目標設置為控制點,采用本文方法精確估計基線獲取估計誤差,對各點進行時空濾波,獲取不同候選點目標的非線性形變相位以及大氣延遲相位。利用相干系數方法篩選點目標,設置點目標相干系數均值的閾值為0.5,獲取最終點目標數量為3684個,將所獲取點目標疊加至桿塔光學影像上,可看出所提取點目標存在不同程度變形,驗證本文方法監測桿塔結構形變具有較高有效性。
依據時間基線以及空間基線內干涉相位變化關系,通過5 次迭代令本文方法所建立模型符合收斂條件。利用回歸處理獲取相干目標干涉相位的線性形變速率以及高程誤差修正結果如圖3 所示。
圖3 實驗結果可以看出,采用本文方法獲取相位回歸結果,測量數值與實際數值結果極為相近,具有較高的擬合效果,驗證了采用本文方法監測桿塔結構中的雷達波相位干涉結果精準性較高,具有較高的測量有效性。
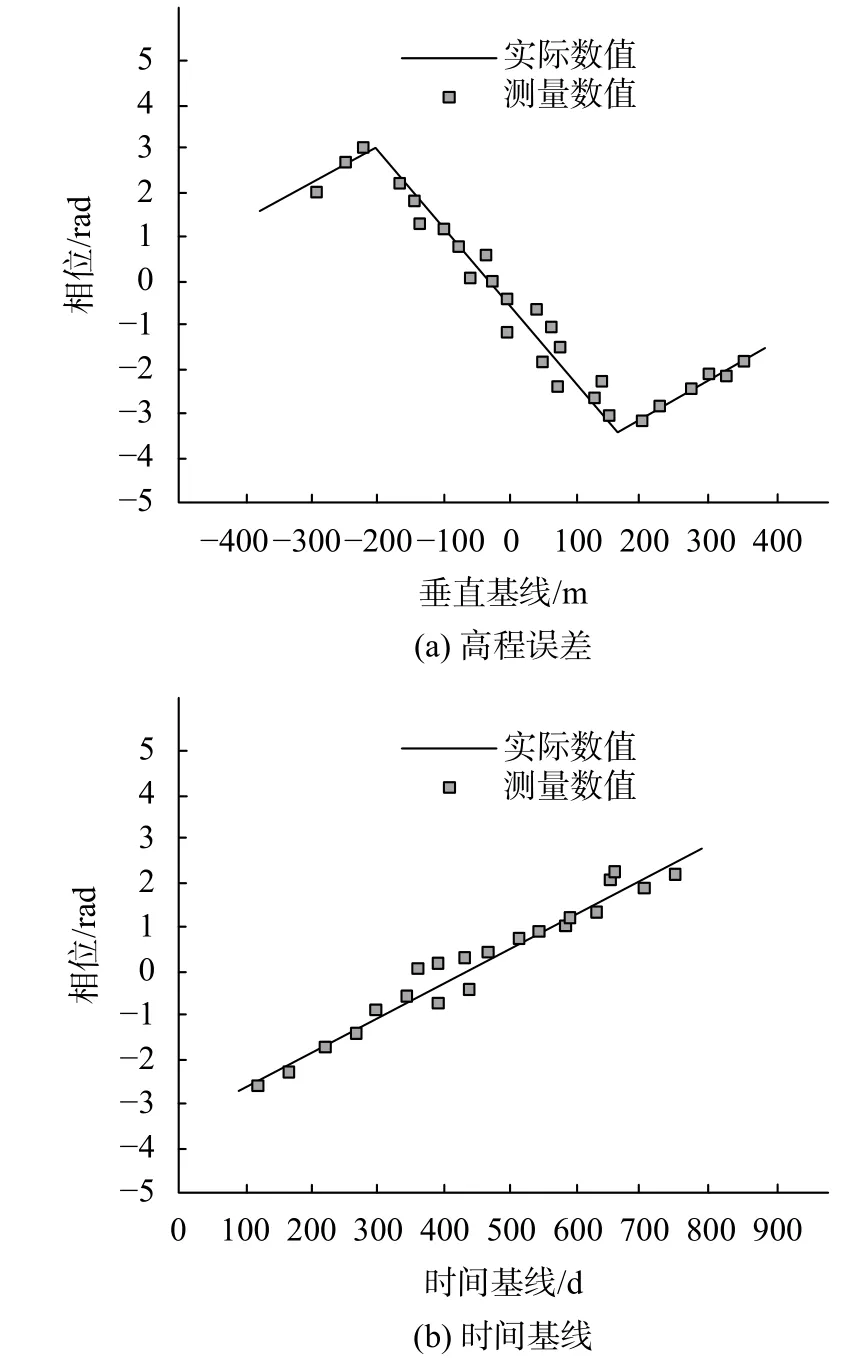
圖3 相位回歸結果
2.2 單筒塔測量結果
采用本文方法監測單筒塔結構形變,獲取不同目標位置形變結果如圖4 所示。依據圖4 采用本文方法所獲取桿塔結構形變結果,擬合單筒塔形變圖如圖5 所示。
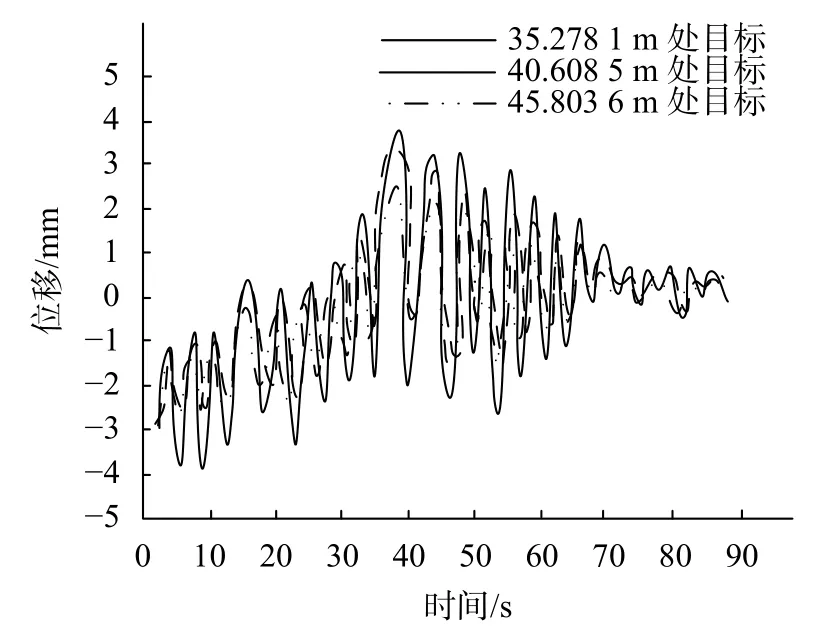
圖4 單筒塔形變時程曲線
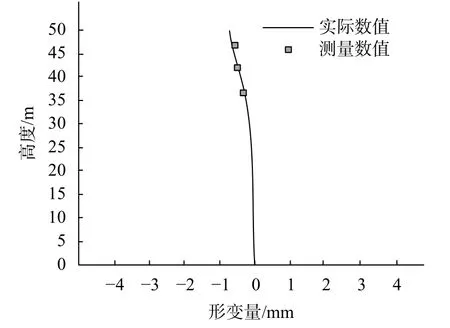
圖5 單筒塔擬合結果
圖5 實驗結果可以看出,依據本文方法所獲取單筒塔結構形變量所擬合單筒塔結果與實際單筒塔形變擬合性較高,驗證了本文方法針對單筒塔具有較高的形變監測有效性。
2.3 三筒塔測量結果
采用本文方法監測三筒塔結構形變,獲取不同目標位置形變結果如圖6 所示。依據圖6 采用本文方法所獲取的三筒塔結構形變結果,擬合三筒塔形變圖如圖7 所示。

圖6 三筒塔形變時程曲線
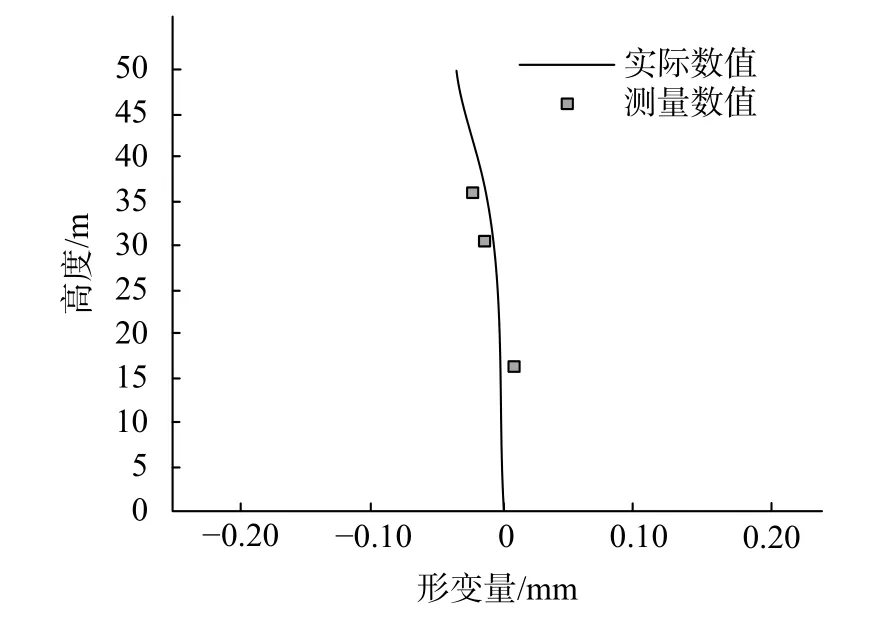
圖7 三筒塔擬合結果
圖7 實驗結果可以看出,依據本文方法所獲取三筒塔結構形變量所擬合三筒塔結果與實際三筒塔形變擬合性較高,驗證了本文方法針對三筒塔具有較高的形變監測有效性。
2.4 角鋼塔測量結果
采用本文方法監測角鋼塔,獲取不同目標位置形變結果如圖8 所示。
依據圖8 本文方法所獲取的角鋼塔結構形變結果,擬合角鋼塔形變圖如圖9 所示。
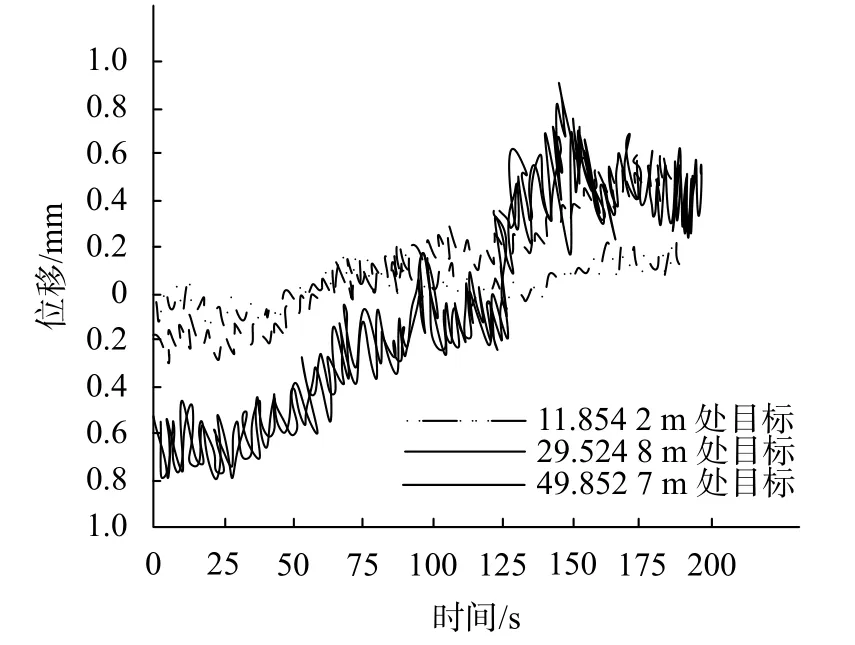
圖8 角鋼塔測量曲線
圖9 實驗結果可以看出,依據本文方法所獲取角鋼塔結構形變量所擬合角鋼塔結果與實際角鋼塔形變擬合性較高,驗證了本文方法針對角鋼塔具有較高的形變監測有效性。

圖9 角鋼塔擬合結果
2.5 時間開銷
依據以上測量結果,采用本文方法和文獻[6]基于載波相位差分、文獻[9]基于零空間矩陣相位解纏方法分別監測單筒塔、三筒塔、角鋼塔不同目標點形變時的時間開銷,統計結果如表1 所示。
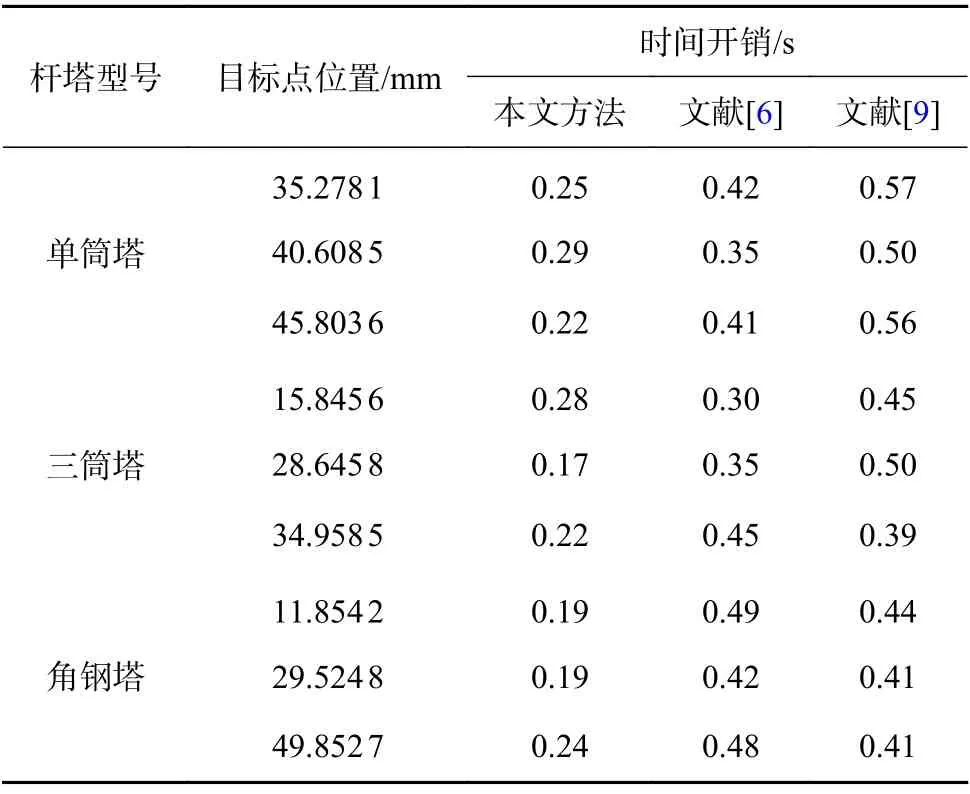
表1 不同目標點時間開銷
表1 實驗結果可以看出,采用本文方法監測不同型號桿塔結構形變,形變監測時間開銷在0.3 s 以內,相比于文獻[6]和文獻[9]監測時間較短,說明采用本文方法時間開銷較小。
2.6 形變監測誤差
依據以上實驗結果統計采用本文方法和文獻[6]基于載波相位差分、文獻[9]基于零空間矩陣相位解纏方法分別監測單筒塔、三筒塔、角鋼塔不同目標點形變時的監測誤差,統計結果如表2 所示。
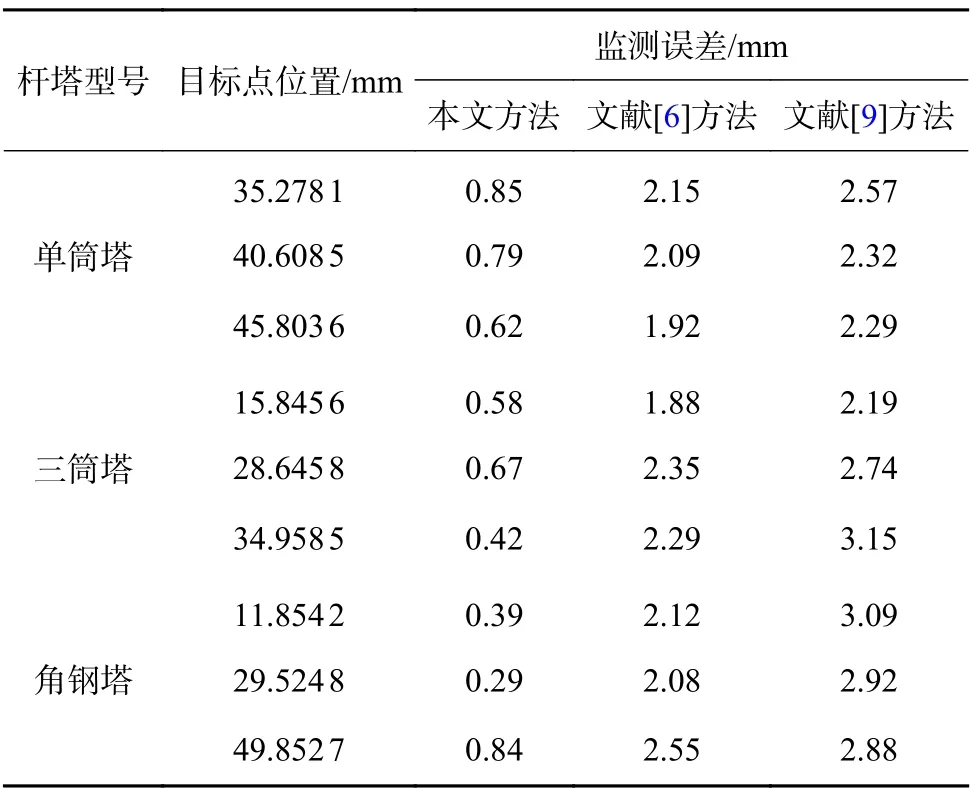
表2 不同目標點監測誤差
表2 實驗結果可以看出,采用本文方法監測不同型號桿塔結構形變,形變監測誤差均低于1 mm,相比于文獻[6]和文獻[9]監測誤差較小,說明采用本文方法在監測時間較短的基礎上桿塔形變精度可高達亞毫米級,有效驗證本文方法具有較高的監測精度,可精準體現不同型號鐵塔結構形變情況,監測性能優越。
3 結束語
利用雷達波相位干涉技術實現桿塔結構形變監測。利用形變相位模型代替空間相位解纏問題,依據點目標檢測算法以及相干系數方法提取相干目標,將相干系數作為約束條件,提升高程誤差修正率以及線性形變速率。通過少量數據即可實現多基線組合處理,提升觀測值數量,獲取精準的桿塔結構形變監測結果。通過實驗驗證采用該方法監測桿塔結構形變具有較高的有效性,所研究方法穩健性高,監測精度較高,可實現亞毫米級桿塔結構形變精準監測。
猜你喜歡
哲學評論(2021年2期)2021-08-22 01:53:34
中華詩詞(2019年7期)2019-11-25 01:43:04
模具制造(2019年3期)2019-06-06 02:10:54
兒童故事畫報(2019年5期)2019-05-26 14:26:14
意林原創版(2016年10期)2016-11-25 10:28:30
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56